
MOBILITY ASSISTED COVERAGE RESTORATION SCHEME
IN WIRELESS SENSOR NETWORKS
Eman AlQuraishi, Paulvanna N. Marimuthu and Sami J. Habib
Kuwait University, Computer Engineering Department, P. O. Box 5969, 13060, Safat, Kuwait
Keywords: Mal function, Coverage, Restoration, Optimization.
Abstract: In this paper, we have examined the problem of simultaneous failure of sensors within the wireless sensor
networks (WSN), whereby the sensors failures are due to malfunction or electrical faults. We have proposed
a mobility assisted coverage restoration algorithm, which restores the coverage of the failed sensors without
adding new sensors. The proposed algorithm follows two phases; clustering and restoration. The clustering
phase groups the failed sensors with their proximity, and then it relocates them into cluster. The restoration
phase moves the nearby active sensor with higher energy to the center of the cluster of failed sensors and
doubles its sensing area to restore the coverage. The restoration scheme exploits the mobility of the sensors
to form clusters of failed sensor, which reduce the number of restoring sensors, thereby prolonging the
lifespan of the network. Experimental results indicate that for a small size WSN comprising of 25 nodes and
nine nodes of it failing simultaneously, our restoration algorithm is able to increase the coverage area from
34% to 86% at the expense of small reduction in the lifespan estimated to be 24% of the network.
1 INTRODUCTION
We are concerned with the restoration of multiple
sensor failures due to electrical faults or
malfunctions in mobile wireless sensor network. In a
work by Habib and PaulvannaNayaki (2010), the
sensors are fixed and a neighborhood active sensor
is utilized to double its sensing radius to restore the
area of the failed sensors. However, the coverage
restoration by doubling of neighboring sensing
radius results in additional energy consumption with
increasing overlapping area, and it further increases
energy consumption with increase in sensor failures.
In this paper, we have considered a wireless
sensor network with mobile sensors, and we have
proposed a mobility assisted coverage restoration
scheme to restore the uncovered area with minimal
active sensors. The simultaneous failure of more
than one sensor results in the development of
uncovered area. The restoration scheme comprises
of two phases. The clustering phase groups the failed
sensors together to form an immediate neighboring
set. The restoring phase moves active sensors with
higher energy to the location of cluster of failed
sensor and doubles its sensing radius to restore
uncovered area. Clustering followed by restoration
reduces the number of active sensors necessary to
double their sensing radius, thus our restoration
method maximizes the coverage area with minimal
energy consumption. Our simulation results show
that for a given wireless sensor network comprised
of 25 sensors and 9 sensors failing simultaneously,
our restoration algorithm increases the total
coverage area by 52% on comparison with the non-
restoration environment.
2 WSN MODEL
The service area to be monitored by sensors is
divided into N x N cells and the given K sensor
nodes denoted by black dots are placed at the center-
of-mass of each cell to cover the service area more
efficiently as illustrated in Figure 1. The sensing
area is assumed to be circular and the sensing range
of each sensor node is confined within its cell by
gray circles. The area of each cell is presented as
width (W) x height (H) sq. units. The total service
area is N² x W x H. For simplicity, we assume that
each cell is a square (W=H) and the area of each cell
is equal to W² (or H
2
). We follow the coverage
restoration model in (Habib and PaulvannaNayaki,
2010) to estimate the coverage area.
87
AlQuraishi E., N. Marimuthu P. and J. Habib S..
MOBILITY ASSISTED COVERAGE RESTORATION SCHEME IN WIRELESS SENSOR NETWORKS.
DOI: 10.5220/0003818000870090
In Proceedings of the 1st International Conference on Sensor Networks (SENSORNETS-2012), pages 87-90
ISBN: 978-989-8565-01-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

The area covered by each sensor with circular
sensing area is given by Equation (1) and the total
area covered by the given sensors is represented by
Equation (2).
2
r
=
2
2
W
, where r=w/2 (1)
Total area covered by K sensors =
2
2
W
K
(2)
In Equation (2), we assume that each cell is
occupied by a sensor, thereby K equals N² and the
total covered area is N² * π * W²/4. The coverage
area is computed as the ratio of the total area
covered by the sensors to the total area of the grid.
In this paper, we assume that each sensor has the
capability to move from one cell to another cell
(mobility). Initially, the sensors are with equal
sensing radius, but with various energy levels;
therefore, the sensors possess diverse lifespan. The
source of power for each sensor depends on three
AAA batteries as in the case of a prototype mobile
sensor. According to Wang et al., (2005), initial
residual energy of the sensors is distributed between
10000J and 16000J and mobile sensor can have a
speed of 2m/s with the energy consumption of
moving one meter is estimated to be equal to 27.96J.
Furthermore, we assume that the sensing radius is
adjustable, and it can be increased or decreased.
However, the increase in the sensing range increases
the power consumption.
Figure 1: The wireless sensor network model.
3 PROBLEM FORMULATION
The main objective function of the coverage
restoration problem is to maximize the coverage area
with reduced energy consumption as stated in
Equation (3). The numerator represents the total area
(A
i
) covered by the active deployed sensors and the
denominator represents the given network area,
which is the area of the given square grid.
2
K
1
i
A
N
Max
i
(3)
Here, we highlight four constraints, which are added
to reduce the energy consumption during sensor
mobility and restoration. The first constraint places
an upper bound D on the distance moved by any of
the given sensor, and it is given by d < D, where d
be the Euclidean distance moved by a sensor from
location (x
1
, y
1
) to location (x
2
, y
2
). This constraint is
added to limit the movement of sensors to a far
location within the network, thereby minimizing the
power consumption.
The second constraint verifies the upper bound
on sensing range of a sensor and it is defined as r
i
<
R for every sensor i in the network. The terms r
i
and
R are the sensing range of sensor i and its upper
bound on sensin range respectively. This constraint
aims at balancing the power consumption between
the sensor nodes with increasing sensing radius. The
third constraint states a lower bound on the lifetime
of the network and is given by
min
TT
Ki
i
TT where
Where T is the sum of lifespan of the active sensors
within the network and T
min
is the minimum allowed
lifespan of the network. K is the number of deployed
sensors. It ensures that the restoration operation is
allowed only if the lifespan of the network is
sufficiently above the given lower energy bound.
In this model, it is assumed that the sensors are
active for one hour daily and they are idle (sleep) for
remaining 23 hours. The sensors consume 102µA in
sleep mode and 77mA in active mode (Jia et al.,
2009). The daily energy consumption for each active
sensor is calculated as 53.5 Joules/day. The lifespan
T of the network (in days) is given as in Equation
(4), where
r
E
is the total residual energy of the
network and
c
E
is the energy consumed till that day.
r
E
c
E
T
days
(4)
a
K
i
i
E
r
E
1
, where E
i
is the energy of the sensors
present at the time of measurement and K
a
represents the total active sensors at that time.
With doubling of sensing range, the energy
consumption in active mode increases by certain
percentage (X). The fourth constraint is added to
limit the number of failing sensors at any time. The
number of failing sensors should be less than the
SENSORNETS 2012 - International Conference on Sensor Networks
88
total number of deployed sensors: M < K, where M,
K are the number of failed sensors and the total
number of deployed sensors, respectively.
4 ANALYSIS OF SENSOR
FAILURES
The distribution of failed sensors within the given
WSN area is classified as clustered and sproadic.
Our restoration algorihtm analyzes the given sensor
network with multiple sensor failures, before
applying the restoration algorithm. If the failed
sensors are clusters by themselves as illustrated in
Figure 2, then each failed node is a neighbor to at
least one of the remaining failed node within the
cluster. If the failed sensors are distributed randomly
as shown in Figure 3, then they are sporadic.
5 COVERAGE RESTORATION
ALGORITHM
We have proposed a mobility assisted restoration
algorithm to restore the coverage area of the failed
sensors, whereby the sensor with highest energy is
allowed to move to the location of the failed clusters
and double its sensing radius to restore the coverage.
The resoration algorithm clusters the failed sensors
before applying the resotration procedure to
minimize the number of restoring sensors.
Figure 2: Clustered failure. Figure 3: Sporadic failure.
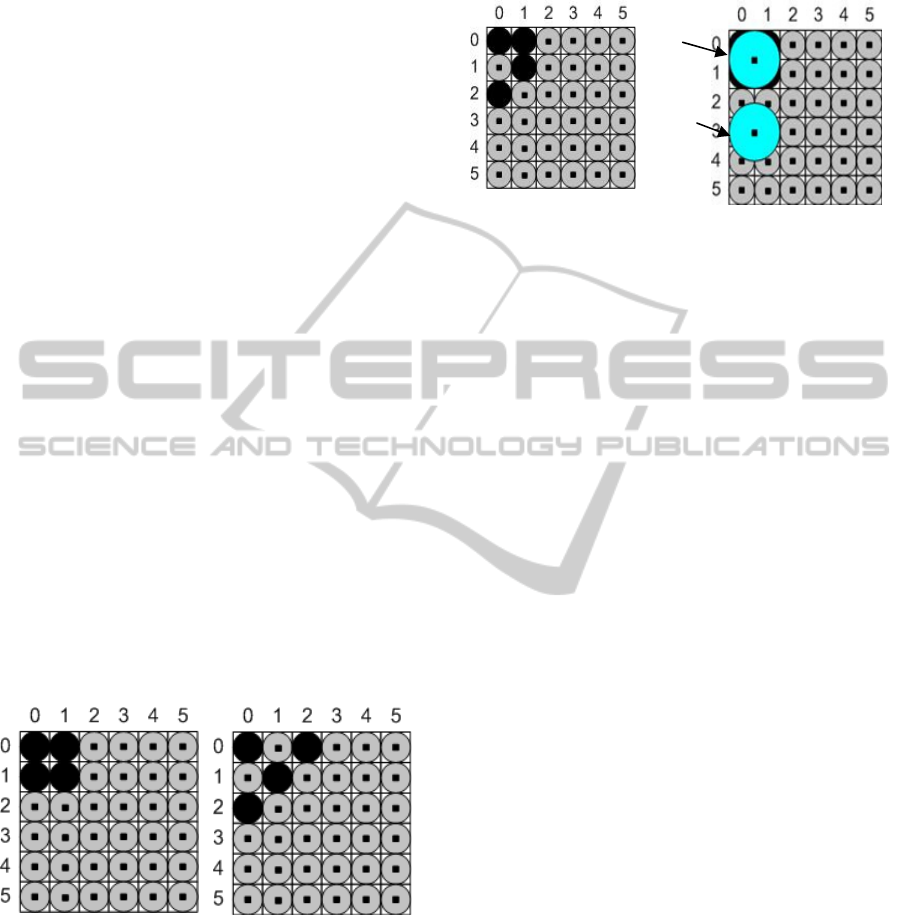
Figures 4 and 5 show the series of operations on
sporadic failure of four sensors as shown in Figure 3
to cluster the failed sensors and then restore the
network with two active sensors. The presence of
active sensors in between the failed sensors as
shown in Figure 3 necessitates the movement of
active sensors to nearby locations so that the failed
sensors form a cluster. In this case, two sensors with
doubled sensing range may be sufficient to cover the
failure of the four sensors.
Figure 4: Swapping
active and failed
sensors.
Figure 5: Restoration.
To balance the energy consumption and prevent
any sensor from being drained out of energy, we
have proposed a scheduling algorithm to schedule
the swapping operation between the active sensors
with doubled radius and with the nearby active
sensors possessing higher energy at the recovery
point.
6 RESULTS AND DISCUSSION
We have coded the restoration algorithm in C++. We
have considered a WSN network with a grid size of
4x4, which is comprised of 16 active sensors
initially. The sensing radius for each sensor is of 2m.
The coverage area and energy levels are updated
every day throughout the lifetime of the network for
three different scenarios; without failure (normal
operation), with failure but without restoration, and
with failure and with restoration. Out of 16 sensors
in the network, we have considered the simultaneous
failure of 9 sensors generated randomly and applied
the clustering and restoration algorithm to restore the
coverage area. Figure 6 illustrates the area coverage
against the lifespan of the network in all the three
categories, where we observed that the failed sensors
with restoration have showed the highest coverage in
most of the days, which is even higher than the
coverage achieved in normal operation. The increase
in area is achieved through the additional coverage
of the corner area of the squared cell, which is not
covered in normal operation.
The simultaneous failure of 9 sensors decreases
the coverage area from 78% to 34%. With the
restoration algorithm, the coverage area has
increased from 34% (failure with no restoration) to
86% (failure with restoration), which corresponds to
52% increase in the coverage area. However, with
B
oundary
P
oin
t
Center
P
oin
t
MOBILITY ASSISTED COVERAGE RESTORATION SCHEME IN WIRELESS SENSOR NETWORKS
89
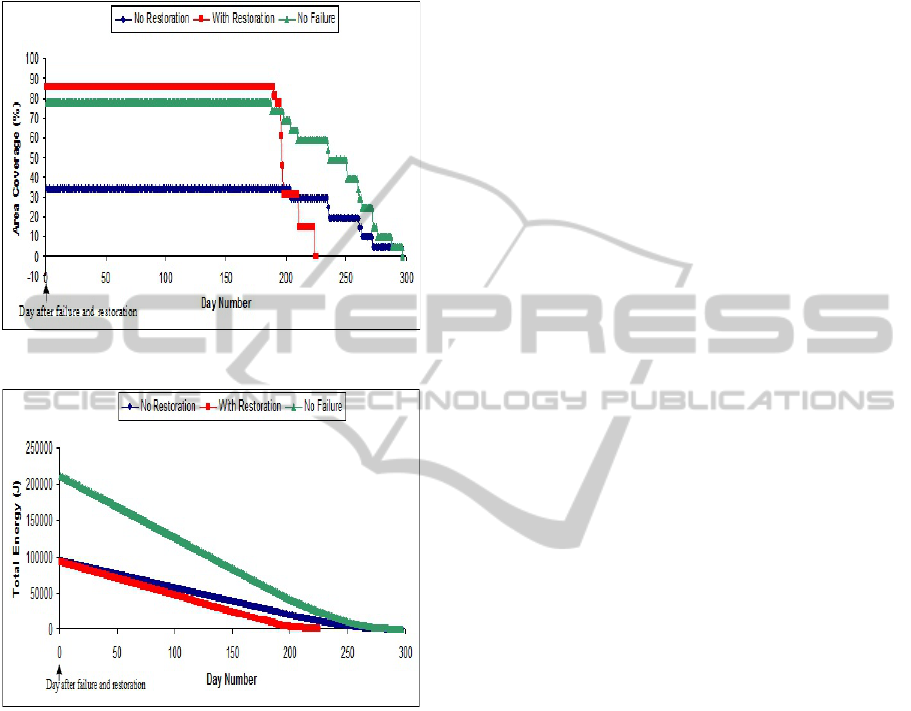
the restoration algorithm, the lifetime of the network
is reduced from 296 days to 223 days, which
corresponds to 24.6% reduction from the normal
lifetime of the network.
Figure 6: Comparison of coverage area.
Figure 7: Network energy level.
Figure 7 shows energy of the WSN in all the
three categories. The normal operation has higher
energy level than the network with failed sensors
(with and without restoration). The sensors failure
reduces the total energy level of the network from
approximately 200,000J to 100,000J. It is also
observed that the energy level of the network with
restoration is in-line with the energy level of the
network without restoration for the first 100 days
and then gap between the graph with and without
restoration increases with the increased energy
consumption by the doubled sensing radius.
7 CONCLUSIONS
In this paper, we have proposed a coverage
restoration algorithm, whereby clustering is followed
by restoration to restore the sensing area of
simultaneously failed sensors. The proposed
algorithm divides the failed sensors into groups of
four with their proximity and the algorithm exploits
the mobility of the sensor nodes to relocate and
cluster the failed sensor nodes and double the sensing
range of few active sensors to restore the coverage.
Experimental results indicate that the proposed
algorithm increases the coverage area to 86% from
34% (without restoration) at the expense of a small
reduction (24%) in the life time of the network.
REFERENCES
Habib, S., and Marimuthu, P. N., 2010. A Coverage
Restoration Scheme for Wireless Sensor Networks
within Simulated Annealing, Proceedings of the
Seventh International Conference on Wireless And
Optical Communications Networks, Colombo, Sri
Lanka.
Jia, J., Chen, J., Chang, G., Wen, Y., and Song, J., 2009.
Multi-objective Optimization for Coverage Control in
Wireless Sensor Network with Adjustable Sensing
Radius. Journal of Computers and Mathematics with
Applications, vol. 57, no. 11-12, pp. 1767-1775.
Wang, G., Cao, G., Porta, T., and Zhang, W., 2005. Sensor
Relocation in Mobile Sensor Networks. Proceedings
of IEEE Annual Joint Conference of the
Communications Societies, 2005, Miami, Florida,
USA.
SENSORNETS 2012 - International Conference on Sensor Networks
90
