
AUTOMATIC OBJECTS DETECTION FOR MODELING INDOOR
ENVIRONMENTS
Marion Decrouez
1,2
, Romain Dupont
1
, Franc¸ois Gaspard
1
and James L. Crowley
2
1
CEA, LIST, Content Engineering and Vision Lab., Point Courrier 94, F-91191 Gif-sur-Yvette, France
Keywords:
Visual SLAM, Bag of Words, Place Recognition, Objects Detection.
Abstract:
In this paper we describe a new solution for constructing a model of a scene and its objects using various
explorations of a single camera in an unknown environment. Object motion presents a difficult challenge
to scene modeling. The proposed method combines metric localization and place recognition to detect and
model objects without a priori knowledge and to incrementally extend a scene model by adding new places
and objects. We demonstrate the quality of our approach with results from image sequences taken from two
different scenes.
1 INTRODUCTION
Live processing of a video sequence taken from a sin-
gle camera enables to model an a priori unknown 3D
scene. Metrical SLAM (Simultaneous Localization
and Mapping) algorithms track the camera pose while
reconstructing a sparse map of the visual features of
the 3D environment. Such approaches provide the ge-
ometrical foundation for many augmented reality ap-
plications (Mouragnon et al., 2006) in which informa-
tions and virtual objects are superimposed on live im-
ages captured by a camera. Improving such systems
will enable in the future precise industrial applications
such as guided-maintenance or guided-assembly in
wide installations. A problem with current methods is
the assumption that the environment is static. Indoor
environments such as supermarket ailes and factory
floors may contain numerous objects that are likely
to be moved, disrupting a localization and mapping
system. In this article, we explore a method for au-
tomatic detection and modeling of such objects. We
define the scene as a static structure that may contain
moving objects. Without any a priori knowledge, we
define an object as a set of visual features that share
a common motion compared to the static structure,
as illustrated figure 1. We analyse multiple explo-
rations of a camera in the same environment to ex-
tract as many informations as possible on the scene
and its temporal evolution. The system presented in
this article enables us to reconstruct an unknown envi-
ronment in 3D, to locate the observing camera within
the scene, to recognize previously visited areas and to
model new objects. We start with a review of the cur-
rent state of the art for localization and mapping sec-
tion 2. We then describe a new technique for localiza-
tion and mapping in section 3, followed by a descrip-
tion of methods for automatic detection of mobile ob-
jects in section 4. Results from experiments with this
method are presented in section 5.
Object position
in the first
exploration
Object position in the
second exploration
1st exploration
2nd exploration
Static Structure
Object added
to the
database
Figure 1: Automatic object detection. Comparing two video
sequences of the same scene taken at different times high-
light moved objects.
2 RELATED WORK
Vision-based methods for localization and mapping
can be classified as metric or topological. Metric
SLAM algorithms enable a visual sensor to explore an
a priori unknown environment performing live map-
ping while simultaneously using the map to estimate
the position and orientation of the camera. However,
existing solutions (Mouragnon et al., 2006) are prone
573
Decrouez M., Dupont R., Gaspard F. and L. Crowley J..
AUTOMATIC OBJECTS DETECTION FOR MODELING INDOOR ENVIRONMENTS.
DOI: 10.5220/0003818205730578
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 573-578
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
to accumulation of numerical errors. In such a case, it
becomes difficult to detect that a camera has returned
to a previously visited position and such algorithms
do not provide the capability to relocate the cam-
era within the map in cases where the camera pose
is lost. Several topological or appearance-based ap-
proaches have been described to address such chal-
lenges. Cummins and Newman (Cummins and New-
man, 2009) define a probalistic model over the bag-
of-words representation (Sivic and Zisserman, 2003).
They determine when the camera is revisiting a pre-
viously mapped area on the basis of image similarity
and do not require metric estimations. Their method
has been found to be robust to perceptual aliasing (the
fact that different places have similar appearances)
by taking into account the co-occurence of the visual
words in the appearance likelihood estimation. Unfor-
tunately, it does not allow real-time processing and it
has proven its effectiveness on panoramic images and
we want to use medium-sized images of indoor envi-
ronments. Recent efforts have been made to combine
both approaches, in order to deal with longer trajecto-
ries while maintaining the 3D point map required for
augmented reality applications. Castle et al. (Castle
et al., 2008) propose an approach that works with sev-
eral 3D maps. The system automatically switches be-
tween maps by relocalizing the current image relative
to previously visited area. Other recent approaches
attempt to extract additional 3D information from the
video stream to extend the scene understanding and
improve the SLAM results. Angeli et al. (Angeli and
Davison, 2010) suggest grouping feature points into
3D clusters using similar appearance and 3D prox-
imity information. Lastly, Kim et al. (Kim et al.,
2010) describe a solution for modeling and tracking
multiple 3D objects in unknown environments. An
object database is built offline and the user can add a
new object by selecting a region of the image. To our
knowledge, there is no solution to automatically en-
rich the objects database using multiple explorations
of the same environment with a mobile camera. This
paper proposes a method to analyse and compare dif-
ferent explorations of the same indoor environment in
order to detect displaced objects and add them to an
object database. Our method is illustrated in the figure
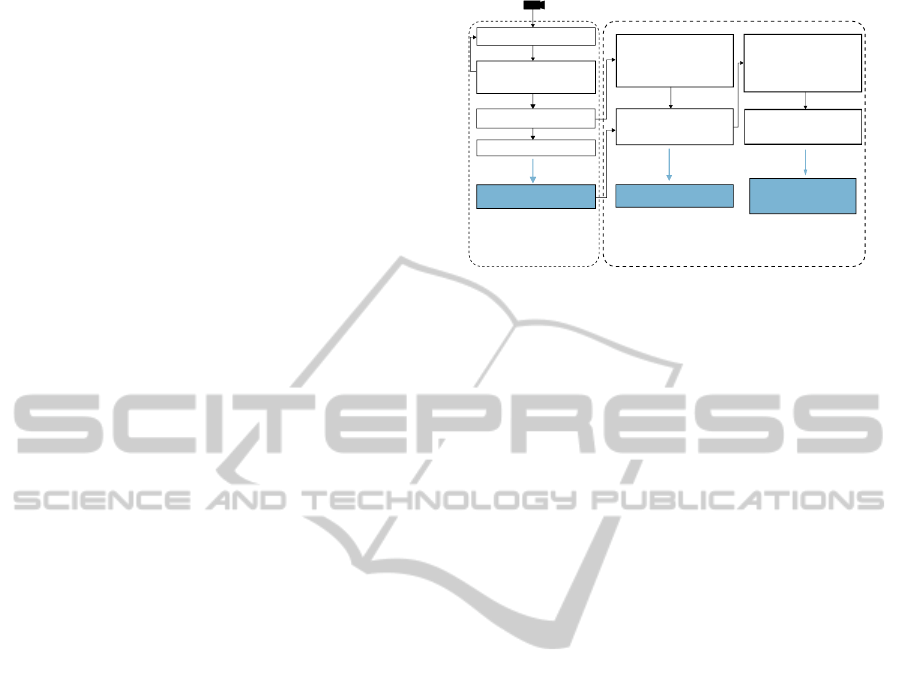
2. We use a keyframe-based SLAM algoritm. Every
new keyframe, we update the 3D map and search for
the closest previous frame to compare the 3D recon-
struction. The scene model and the object detection
are described in the following sections.
Features Extraction
New Keyframe
3D Map Update
Localization
and 3D mapping
Searching for
past similar
keyframes
3D Geometric
Validation
Objects
segmentation
using motion
Automatic objects detection
3D Points Cloud
Place recognition
Objects
database
Camera Pose
Estimation
Object added to
the database
New image
Figure 2: Proposed method: 3D reconstruction and auto-
matic objects detection.
3 MODELING THE SCENE
This section presents our proposed algorithms for
metric SLAM and appearance-based place recogni-
tion. These two methods are combined in the 3D ge-
ometrical validation solution described section 3.3.
3.1 3D Reconstruction
We use the method described by Mouragnon et al.
(Mouragnon et al., 2006) to estimate the points po-
sitions and the camera pose. Live processing of the
video stream enables to build a sparse map of 3D
points. The system detects Harris-Stephen points in
the current image and extracts SURF descriptors (Bay
et al., 2006). These interest points are matched with
the projection of 3D points seen in the previous frame
to compute the camera pose. Some keyframes are se-
lected to compute the 3D coordinates of the observed
points with the new camera pose. Thus, the map is
updated and the system optimizes the scene using lo-
cal bundle adjustment. This method constructs the 3D
environment in real-time but it is prone to errors in the
camera pose and scale drift. Such errors can disrupt
detection of loop closure. To avoid such problems,
we use a place recognition algorithm based on appear-
ance to first check whether the current image comes
from a previously visited location 3.2 and then detect
displaced objects 4.
3.2 Place Recognition
We use a place recognition algorithm based on the
bag-of-words image representation (Sivic and Zisser-
man, 2003) to detect previously visited areas. This
method shows outstanding retrieval results on large-
scale image databases. Local features are detected in
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
574

the image and quantized in visual words with respect
to a vocabulary. The vocabulary is learned beforehand
by clustering all feature vectors from a set of train-
ing data (3000 random Flickr images) using k-means
clustering and contains 10000 visual words. Each
keyframe selected by the SLAM method is registered
in the image database and is represented as a vector of
visual words. We take advantage of the inverted index
to find the most likely past keyframe that matchs the
current keyframe. Each time a word is found, we up-
date the similarity scores of the past images retrieved
from the index by adding the term frequency - in-
verted document frequency (tf - idf) weighting term as
in (Sivic and Zisserman, 2003). Thus, we measure the
similarity between a pair of images and then assume
that two images with high similarity score are taken
from the same location. However, the current obser-
vation may come from a previously unknown place.
A geometric post-verification stage, which tests the
geometric consistency of the matched images, is re-
quired.
3.3 Merging Both Approaches with a
3D/2D Geometric Validation
We confirm the place recognition hypothesis with a
3D validation. Features extracted in the database im-
age are matched to the projection of 3D points seen in
the current image. We estimate the relative pose be-
tween these two similar images. We retain the match
if there are enough points verifying the geometric
constraint. Thus, we reject all errors due to percep-
tual aliasing. Besides, this method makes it possible
to determine the static structure of the scene and to
identify a set of inconsistent points. In the case where
a scene is composed of multiple rigid objects moving
relative to each other, we can detect possible objects
as nearby sets of points that share similar movement.
We present an overview of the state of the art for two-
view multiple motion estimation in the section 4.1 and
our method for object detection in section 4.2.
4 AUTOMATIC OBJECTS
DETECTION
Comparing two views of the same 3D scene taken at
different times highlights 3D points inconsistent with
the static structure. We want to infer the presence
of moved objects by clustering points according with
their motion. The setting is the following: given the
set of corresponding points in two similar images, we
have to estimate the movement of the camera and the
movement of an unknown number of moving objects.
In this section we first review alternative methods for
two-view multibody estimation and then describe our
approach.
4.1 Two-view Multiple Structures
Estimation
To simplify the problem, we consider only planar ob-
jects. We need to detect multiple planar homogra-
phies in image pairs. Zuliani et al. (Zuliani et al.,
2005) describe the multiRANSAC algorithm but this
method requires prior specification of the number of
model. Toldo and Fusiello (Toldo and Fusiello, 2008)
present a simple method for the robust detection of
multiple structures in pairs of images. They generate
multiple instances of a model from random sample
sets of correspondences and then merge group points
belonging to the same model using a agglomerative
clustering method called J-Linkage. Our method is
based in part on this algorithm. We combine planar
detection with 3D reconstruction to detect only mov-
ing objects.
4.2 Identification of the Moving Objects
in the 3D Scene
Our metrical SLAM algorithm constructs a sparse
map of the environment. Inconsistent points retrieved
at the 3D validation step aren’t enough to estimate a
model and define an object. To tackle this problem,
we extract a large number of features in each image,
match them and generate many local hypotheses of
homographies. We then merge sets of points belong-
ing to the same motion using a technique explained
below and finally keep those with points associated
with 3D inconsistent points. We use SURF features
to describe interest points. Each feature is matched
with its nearest neighbor in the similar image. Figure
3 illustrates our method.
4.2.1 Preliminaries and Notation
Points in the 2D image plane of a camera are repre-
sented by homogeneous vectors p. p
1
and p
2
are two
corresponding points detected in pair of similar im-
ages. These points are the projection of the same 3D
points in different camera views. We have to detect
perspective transformations (homographies) that map
planar surfaces from one image to the other. To do so,
we find the set of correspondences fitting the same
homography H:
p
2
∼ H p
1
. (1)
AUTOMATIC OBJECTS DETECTION FOR MODELING INDOOR ENVIRONMENTS
575

(a) (b)
(c) (d)
Figure 3: Object segmentation. (a) Estimation of the rela-
tive pose between pair of similar images highlights points
of the static structure (blue circles) and inconsistents points
(red stars). (b) Multiple planes detection: best homogra-
phies in each subregions of the image planes. (c) Sets of
points belonging to the same model are merged. (d) Moved
objects are detected as the sets of points containing incon-
sistents 3D points.
H is a (3 x 3) matrix, with eight degrees of freedom.
This matrix can be determined from four correspon-
dences. In our case, the system is overdetermined as
we have to estimate H by taking into account all the
correspondences that may verify the relation 1. Since
the image point measurements are corrupted by noise,
a correspondance will not lie exactly on the homogra-
phy, but will differ from it by a residual e. To quantify
the residual, we use the approximation of the geomet-
ric error called Sampson-distance (Hartley and Zisser-
man, 2000). Relation 1 can be reordered as an equa-
tion system Ah = 0, such as h contains the nine un-
known entries of H. Sampson-distance with respect
to a homography is thus given by
e
2
Sampson
= h
T
A
T
JJ
T
−1
Ah, (2)
where J =
∂(Ah)
∂( ˜p)
is the Jacobian of the linear equa-
tion system. We consider that a correspondance is
inlier if its residual is below a threshold ε (we take
ε = 1.5). Using the form given in (Hartley and Zis-
serman, 2000) : ε =
√
5.99 ∗σ. σ is the scale of the
noise of the data measurements, here σ = 0.6.
4.2.2 Iterative Ransac Procedure
We want to use a simple method to find the best ho-
mographies between a pair of images. We use a se-
quential RANSAC procedure: we sequentially apply
RANSAC and remove the inliers from the data set as
each model instance is detected. At each iteration, the
model that fits the larger number of points is the best
model. The procedure is repeated if the number of
remaining points is sufficient.
Figure 4: Local sampling used to generate RANSAC hy-
pothesis. Samples are drawn in subregions of the image
plane.
4.2.3 Local Sampling
The scene may contain multiple plans and the data
is corrupted by noise and matching errors. Under
these conditions, only a small fraction of all corre-
spondences belongs to each model. The problem
may become intractable: using the standard formula
for RANSAC and considering that an object covers
10 percent of the entire image we need
log(1−0.99)
log(1−0.1
4
)
≈
46000 iterations. To overcome this problem, we ex-
ploit the spatial coherence of points belonging to the
same object (clustered in a region of the image) and
generate RANSAC hypotheses using a local sampling
like Schindler et al. (Schindler and Suter, 2006). The
image plane is subdivided into three overlapping rows
and three overlapping columns and the samples are
drawn from the entire image, each column, each row,
and each of the nine regions defined by a row-column
intersection 4. This heuristic takes advantage of the
spatial coherence and reduces the required RANSAC
sample number. We assume that an object covers at
least 50 percent of one region, we also need to gener-
ate ≈ 100 samples per regions.
4.2.4 Merging
Our algorithm generates groups of points X
1
, ..., X
n
belonging to planar regions. Since the initial hypothe-
ses are generated with local sampling, a large planar
surface in the scene may result in several planes (fig-
ure 3(b)). We need to merge these groups of points.
We first merge groups with more than 80 percent of
points in common. Then, then for each pair of sets X
1
and X
2
we estimate a homography
ˆ
H with the group
X
1
∪X
2
using least-square minimisation estimation.
X
1
and X
2
are merged if the mean of the error for the
new model is below ε:
1
|X
1
∪X
2
|
∑
c∈X
1
∪X
2
e
ˆ
H
(c) < ε (3)
4.2.5 Objects Detection
The steps of the algorithm described above provide
sets of points from planar regions in the scene (fig-
ure 3(c)). To detect an object, we must detect planar
regions with motion that is different from the rest of
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
576

Figure 5: Objects detection on four place recognition cases. 1 : Current keyframe, blue circles denotes points of the static
structure, red circles are inconsistent points. 2 : Similar database image. 3 : Homographies detected in image pairs. 4 : Edges
of actually being moved objects are dashed, set of circles of different colors denotes the objects detected by our algorithm.
the scene. We use information from 3D reconstruc-
tion and geometric validation: moving objects are sets
of points containing inconsistents 3D points (figure
3(d)).
5 EXPERIMENTAL RESULTS
AND DISCUSSIONS
5.1 Experimental Validation
We have validated our algorithm on real data. We use
a sequence of 2035 frames taken inside a building.
Figure 5 presents our results for the object detection
on four cases of place recognition. The first and sec-
ond views are two images taken from the same lo-
cation. The second view shows the projection of 3D
points on the image plane: blue points are from the
static structure and red stars are inconsistent points.
The third view presents planar surfaces of the scene
and the fourth view shows objects that have been actu-
ally moved (dashed) and points belonging to the same
objet (circles of the same color). In figures 7(a), 7(b),
7(c) the moved objects are correctly detected. The
disappearance of the person in figure 7(c) does not
disrupt the recognition and the pose estimation. In-
deed, the person occupy a small part of the image
plane and the points detected on the person are not
matched in the similar image. In figure 7(d), three
objects have actually moved. Only two of them are
detected by our algorithm as the two books in the left
have a very similar motion.
5.2 Objects Detection Improvements
Figure 6 illustrates our results for the first sequence:
3D reconstruction, place recognition and object de-
tection. Six moving objects were detected. In practice
AUTOMATIC OBJECTS DETECTION FOR MODELING INDOOR ENVIRONMENTS
577

Figure 6: (a) 3D reconstruction of an indoor scene, (b)
Matching images, (c) Objects detected in the scene.
we observe two limitations:
• outliers that do not belong to the object,
• falses object detection.
5.2.1 Outliers Management
Sets of points may contain outliers that do not be-
long to the object. We filter these outliers as fol-
lows: for each set of points associated with an ob-
ject, we estimate the mean and standard deviation
of the spatial coordinates and reject points outside
¯x + 2σ
x
] ∩[ ¯y −2σ
y
, ¯y + 2σ
y
]. σ
x
et σ
y
are the abscissa
and ordinate standard deviations estimated with the
Median Absolut Deviation estimator. ¯x et ¯y are the
abscissa and ordinate medians.
5.2.2 Falses Detections
Our algorithm produces sets of points associated with
objects in the scene. Nevertheless, we may observe
falses positives in the detection (sets of static points
considered as moved objets). There are a number of
cases where the static structure of the scene is difficult
to determine. For example, this can occur when much
of the scene has moved between two explorations
or when the moved object covers most of the image
plane. For the first sequence, we count 10 falses pos-
itives on 70 detections. We filter these errors keeping
only objects detected more than three times. In the
future, we plan to avoid falses positives using a pri-
ori information from the analysis of previous frames,
which can be used to precisely determine the static
structure.
6 CONCLUSIONS
We have presented a scheme to automatically detect
objects. Using several explorations of a camera in the
same scene, we detect and model moved objects while
reconstructing the environment. Experiments high-
lignt the performance of the method in a real case of
localization in an unknown indoor environment. Our
intention is to model a large environment subject to
many changes, such as workshop factory or a shop-
ping area, and to maintain a map of locations and fre-
quently seen objects. Use cases for this work include
providing context aware information for a user of a
mobile device by providing location based informa-
tion on the environment context and detecting objects
of interest. We plan to improve the place recognition
and metric localization results by taking into account
non static hypothesis. Moreover, object and motion
detection is useful for augmented reality applications.
REFERENCES
Angeli, A. and Davison, A. (2010). Live feature cluster-
ing in video using appearance and 3D geometry. In
BMVC.
Bay, H., Tuytelaars, T., and Gool, L. V. (2006). SURF :
Speeded Up Robust Features. ECCV.
Castle, R. O., Klein, G., and Murray, D. W. (2008). Video-
rate localization in multiple maps for wearable aug-
mented reality. In SWC.
Cummins, M. and Newman, P. (2009). Highly scalable
appearance-only SLAM : Fab-map 2.0. In RSS.
Hartley, R. I. and Zisserman, A. (2000). Multiple View Ge-
ometry in Computer Vision. Cambridge University
Press.
Kim, K., Lepetit, V., and Woo, W. (2010). Keyframe-based
Modeling and Tracking of Multiple 3D Objects. IS-
MAR.
Mouragnon, E., Lhuillier, M., Dhome, M., Dekeyser, F., and
Sayd, P. (2006). Monocular Vision Based SLAM for
Mobile Robots. ICPR.
Schindler, K. and Suter, S. (2006). Two-view multibody
structure-and-motion with outliers through model se-
lection. PAMI.
Sivic, J. and Zisserman, A. (2003). Video Google: a text
retrieval approach to object matching in videos. ICCV.
Toldo, R. and Fusiello, A. (2008). Robust multiple struc-
tures estimation with j-linkage. In ECCV.
Zuliani, M., Kenney, C. S., and Manjunath, B. S. (2005).
The multiransac algorithm and its application to detect
planar homographies. In ICIP (3).
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
578
