
TRACKING-BY-REIDENTIFICATION IN A NON-OVERLAPPING
FIELDS OF VIEW CAMERAS NETWORK
Boris Meden
1
, Fr
´
ed
´
eric Lerasle
2,3
, Patrick Sayd
1
and Christophe Gabard
1
1
CEA, LIST, Vision and Content Engineering Laboratory, Point Courrier 94, F-91191 Gif-sur-Yvette, France
2
CNRS, LAAS, 7 Avenue du Colonel Roche, F-31077 Toulouse Cedex 4, France
3
Universit
´
e de Toulouse, UPS, INSA, INP, ISAE, UT1, UTM, LAAS, F-31077 Toulouse Cedex 4, France
Keywords:
Reidentification, Tracking, Camera Network, Non-overlapping Fields of View, Particle Filtering.
Abstract:
This article tackles the problem of automatic multi-pedestrian tracking in non-overlapping fields of view
camera networks, using monocular, uncalibrated cameras. Tracking is locally addressed by a Tracking-by-
Detection and reidentification algorithm. We propose here to introduce the concept of global identity into a
multi-target tracking algorithm, qualifying people at the network level, to allow us to rebound observation dis-
continuities. We embed that identity into the tracking loop thanks to the mixed-state particle filter framework,
thus including it in the search space. Doing so, each tracker maintains a mutli-modality on the identity in
the network of its target. We increase the decision strength introducing a high level decision scheme which
integrates all the trackers hypothesis over all the cameras of the network with previous reidentification results
and the topology of the network. The tracking and reidentification module is first tested with a single camera.
We then evaluate the whole framework on a 3 non-overlapping fields of view network with 7 identities. The
only a priori knowledge assumed is a topological map of the network.
1 INTRODUCTION
This article addresses the problem of pedestrian track-
ing in large scale environnment. Material and eco-
nomical reasons generally limit the number of cam-
eras thus yielding discontinuities/blind spot in the net-
work field of view. We use the term non overlap-
ping fields of view networks (abbreviated NOFOV
networks). Figure 2 provides an example of such a
network.
The goal of the tracking module is then to cope
with these discontinuities and to still guarantee spatio-
temporal consistency. Beyond the image plane track-
ing, the system should be able to re-identify the tar-
gets when it appears in a new camera.
We propose here to integrate the reidentification
mixed-state particle filter framework (Meden et al.,
2011) in a multi-target tracking-by-detection algo-
rithm (Breitenstein et al., 2010). This allows an online
reidentification, embedded in the multi-target track-
ing process, based on a colorimetric signature of the
identities. The second contribution of that paper re-
sides in the addition of a supervision module, working
at the network level, that integrates and compares the
reidentification results and validates them relatively to
the network topology.
Previous works are reviewed in the section 2.
Then, we describe the tracking-by-reidentification
module, that operates on each camera in the section 3.
The supervision module is detailed in 4. Finally, sec-
tion 5 presents both qualitative and quantitative anal-
ysis of the camera level module, and of the addition
of topological constraints when applied to a NOFOV
network.
Figure 1 summarizes the proposed architecture,
with local treatments of the cameras and the centrali-
sation of the reidentification results.
2 STATE OF THE ART
Pedestrian reidentification becomes a necessity when
targets’ trajectories present discontinuities due to the
lack of observability. The underlying notion is the one
of global identity within the network, opposed to the
local identity of each tracker tracking locally a target
during its visibility time in the camera. The quality of
a multi-target tracking framework is evaluated by its
capacity to keep trackers on the targets they follow w-
95
Meden B., Lerasle F., Sayd P. and Gabard C..
TRACKING-BY-REIDENTIFICATION IN A NON-OVERLAPPING FIELDS OF VIEW CAMERAS NETWORK.
DOI: 10.5220/0003818300950103
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 95-103
ISBN: 978-989-8565-04-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
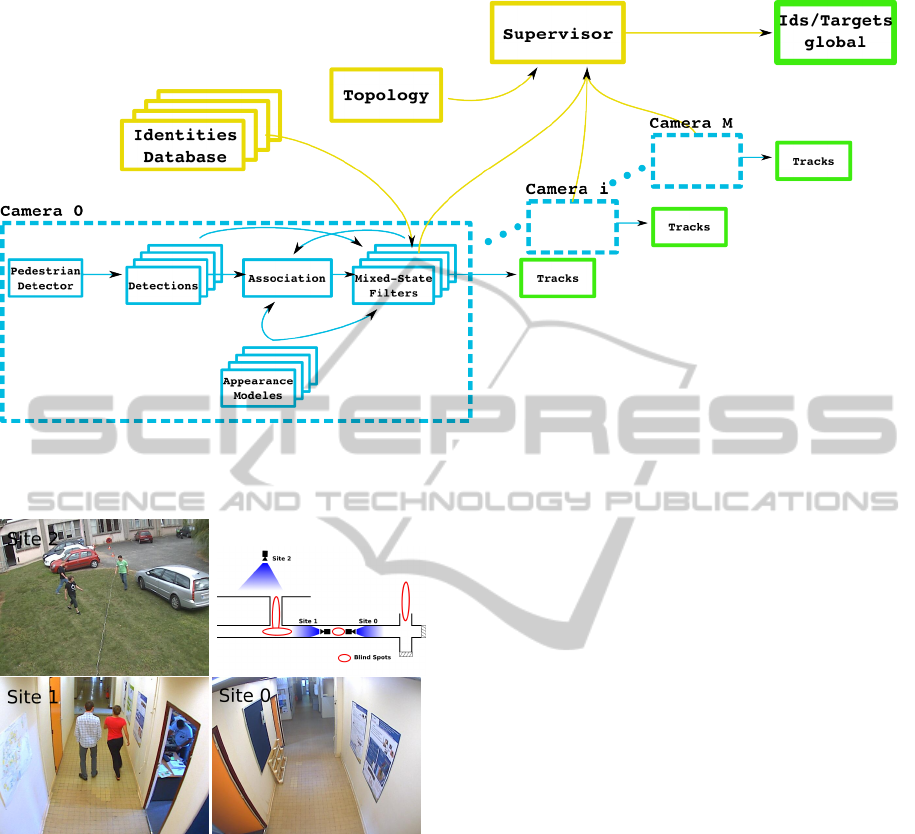
Figure 1: Achitecture of our system. Tracking and reidentification in the image are localized at the cameras level, whereas
the supervisor works at the network level, confronting identities distributions between them and to the topology.
Figure 2: Camera network with non-overlapping fields of
views.
hile these targets are visible, i.e. to keep the same lo-
cal identity (Bernardin and Stiefelhagen, 2008). How-
ever this notion of identity is limited to the spatio-
temporal continuity of the tracking (after exiting, a
re-entering target would receive a new local identity).
The problem of joint tracking and identification in
overlapping fields of view network e.g. (Qu et al.,
2007) is really similar. The combination of video
streams from different sensors comes usually with the
calibration of the system, allowing to work in com-
mon coordinates, and thus identification is based on
the trackers spatio-temporal continuity.
However, a NOFOV network (figure 2) presents
discontinuous observations, corresponding to the tar-
gets’ transit times between the different cameras of
the network or to entry/exit within the same cam-
era. This problem is called pedestrian reidentification,
and we introduce here the notion of global identity to
qualify a target in the network, which will be his/her
identity at each of his/her periods of observability in
the cameras.
This reidentification problem is classically treated
as a request in a database, inspired from web tech-
nologies, and put the focus on the pedestrian ap-
pearance description to re-identify. Thus, (Gray and
Tao, 2008) propose to train a classifier on the invari-
ant parts during a camera change. (Farenzena et al.,
2010) adopt the same approach whithout any learning,
proposing a robust fixed signature based on symetry
and asymetry of the appearance and well positionned
colorimetric features. These methods are costly in
terms of computation time and are well suited to
a posteriori treatments.
For a camera network application, the reidentifi-
cation module should allow real time computation of
video streams. Here we target an online update of tar-
gets’ global identities. A similar problem has been
tackled by (Chen et al., 2008; Lev-Tov and Moses,
2010; Zajdel and Kr
¨
ose, 2005). However (Zajdel and
Kr
¨
ose, 2005) suppose to have single pedestrians pass-
ing in the network, (Chen et al., 2008) do not report on
their tracking process and (Lev-Tov and Moses, 2010)
just simulate a NOFOV network and do not work on
images. These works do not consider tracking and
reidentification jointly, and thus occult the difficulties
of multi-target tracking.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
96

Mono-camera multi-target tracking is a largely
tackled problem in the Computer Vision community:
our approach is based on different associated assess-
ments. First, particle filtering algorithms’ interest
for tracking (CONDENSATION) have been established
since the initial work of Isard and Blake in (Isard
and Blake, 2001), notably for multiple targets. Then,
since (Okuma et al., 2004), tracking-by-detection has
emerged and particularly the temporal integration of
tracklets, which robustness has been proven by Kau-
cic et al. in (Kaucic et al., 2005). Tracklets optimisa-
tion has also been extended to two cameras present-
ing a disjoint field of view by (Kuo et al., 2010). This
method yet does not work online, as the optimisation
is conducted on a temporal window.
In opposition to them, our approach places itself
in the markovian formalism for the tracking module.
Our approach is inspired of (Breitenstein et al., 2010)
and (Wojek et al., 2010). Like (Breitenstein et al.,
2010), it is based on distributed particle filters en-
hanced by a reidentification component coming from
a discrete identity variable also sampled. They are
termed mixed-state particle filters. Then, in the vein
of (Wojek et al., 2010), we perform a tracklet tempo-
ral integration, but on the identities here, and not for
cameras but on the whole network.
3 TRACKING-BY-
REIDENTIFICATION WITHIN
A CAMERA
In this article, we propose an extension to NOFOV
networks of the tracking-by-detection algorithm pro-
posed by Breitenstein et al. in (Breitenstein et al.,
2010), introducing the notion of global identity that
we seek to retrieve for each target. We present in
this section our implementation of (Breitenstein et al.,
2010) and how the use of mixed-state particle filtering
for reidentification (Meden et al., 2011) comes to ex-
tend that approach.
3.1 Targets Description
3.1.1 Global Identities Learning
Each reidentification algorithm needs a first view be-
fore allowing any reidentification. Here, we assume
that such a database is acquired offline. To do so,
we extract a collection of key-frames from one of the
cameras (e.g. positioned in the entrance hall of the
building to monitor), and we use these as description
of our global identities. The choice of the key-frames
is done with K-means on tracking sequences from the
chosen camera as detailled in (Meden et al., 2011).
Thus, these key-frames encode the variability of the
identity during its first tracking. Figure 3 presents
the identity database used for the network of figure 2,
learned in camera 1.
Figure 3: Key-frames of each identity for the NOFOVNet-
work sequence (issued from camera 1).
3.1.2 Target Appearance Modelling
We use the same appearance model as depicted
in (Meden et al., 2011) to describe the targets and
their identities in the database: horizontal stripes of
color distributions, computed in the RGB space. The
similarity between two descriptors is the Bhattachar-
rya distances between corresponding stripes, normal-
ized by a gaussian kernel. This allows us to compute
similarities to the appearance model of a tracker, and
also to the key-frames of an identity in the database,
respectively noted w
App
(.) and w
Id
(.).
3.2 Detections Integration
3.2.1 Association to Detections
Our approach favor a tracking-by-detection strategy
via the classical HOG detector proposed by Dalal and
Triggs in (Dalal and Triggs, 2005). These detections
are integrated in the tracking process by a greedy as-
sociation stage. After that association, each tracker
has potentially received a detection which will be
used to update the particles. To do so, an associa-
tion matrix is built between trackers and detections.
The score of pair detection d vs. tracker tr given by
equation (1), involves:
• the distance between the tracker’s particles and
the detection, evaluated under a gaussian kernel
p
N
(.) ∼ N (.,σ
2
) ;
• the tracker’s box area A(tr) relatively to the detec-
tion’s one also evaluated under a gaussian kernel;
• the tracker’s appearance model evaluated on the
detection (w
App
(.)).
S(d,tr) =
N
∑
p∈tr
p
N
(d − p)
| {z }
euclidean distance
× p
N
|A(tr) − A(d)|
A(tr)
| {z }
relative size
× w
App
(d,tr)
| {z }
appearance model
(1)
TRACKING-BY-REIDENTIFICATION IN A NON-OVERLAPPING FIELDS OF VIEW CAMERAS NETWORK
97

Thus, tracker and detection should present simulta-
neously a similar position, a similar size and a similar
colorimetric response. Once the matrix is built, max-
ima are extracted on greed manner, suppressing lines
and columns after affectation. The process is iterated
till the pairing threshold is reached. Such a heuris-
tic is preferred to the optimal method, the Hungarian
Method (Kuhn, 1955), unsuited for its complexity.
3.2.2 Automatic Tracker
Initialisations/Terminations
Every temporally recurrent detection, which is not as-
sociated to any tracker, yields the instanciation of a
new tracker. On a similar manner, every tracker which
has not been associated with a detection for a time pe-
riod longer than the suppression threshold is stopped.
3.3 Particle Filtering
3.3.1 Mixed-state Prediction Model
Each target initialized on a detection is tracked by a
particle filter. Given the identity database, we have
extra reference descriptors to compare with. To do
so, following (Meden et al., 2011), we use Mixed-
State CONDENSATION filters, introduced in (Isard
and Blake, 1998). We aim to estimate a mixte state
vector, composed of several continuous terms and a
discrete one.
X = (x,id)
T
, x ∈ R
4
, id ∈ {1, ... ,N
id
}
The continuous part of the state x = [x,y, v
x
,v
y
]
T
is
composed of the position in the image plane (x,y)
T
and of the speed vector (v
x
,v
y
)
T
. The integer part id
refers to one of the N
id
identities in the database. The
tracking is conducted in the image plane, and track-
ing box dimension is updated on the associated detec-
tions. The appearance model is also updated on the
associated detection. Given this extended state vec-
tor, the density of sampling process at image t can be
decomposed (Isard and Blake, 1998):
p(X
t
|X
t−1
) = p(x
t
|id
t
,X
t−1
) · P(id
t
|X
t−1
)
P(id
t
|X
t−1
) : P(id
t
= j|x
t−1
,id
t−1
= i) = T
i j
(x
t−1
)
p(x
t
|id
t
,X
t−1
) : p(x
t
|x
t−1
,id
t−1
= i,id
t
= j) = p
i j
(x
t
|x
t−1
)
where T
i j
(x
t−1
) is the transition probability from
identity i to j, applied to the discrete identity pa-
rameter, and p
i j
(x
t
|x
t−1
) is the sampling applied to
the continuous part. The transition matrix T = [T
i j
]
is built over the set of key-frames. The element T
i j
is the similarity w
id
(.) between identities i and j of
the database, computed between the most different
key-frames. Particles are propagated according to a
first order motion model:
p
i j
(x
t
|x
t−1
) :
(x,y)
t
= (x,y)
t−1
+ (v
x
,v
y
)
t−1
· ∆t +ε
(x,y)
(v
x
,v
y
)
t
= (v
x
,v
y
)
t−1
+ ε
(v
x
,v
y
)
where the noises ε
(x,y)
and ε
(x,y)
are drawn from nor-
mal distribution and where ∆t is the time interval be-
tween two images.
3.3.2 Observation Model Integrating Detections
The weight w
(p)
tr
associated with the p-th particle of
tracker tr is computed integrating the distance to the
associated detection d
∗
, the colorimetric similarity to
the appearance model w
App
(.) and the colorimetric
similarity to the identity of the particle w
Id
(.). Id(p)
represents the identity taken by particle p. This is the
discrete parameter of p.
w
(p)
tr
=
α · I (tr) · p
N
(d
∗
− p)
| {z }
distance to the detection
+β · w
App
(d,tr)
| {z }
appearance model
+γ · w
Id
(d,id(p))
| {z }
identity
(2)
where α, β and γ are weighting coefficients, and I (tr)
is a boolean signifying the existence or not of an as-
sociated detection to the tracker. As in (Meden et al.,
2011), the introduction of similarity relative to the
identity in the particle weighting drives the particle
cloud towards the most likely identities given the re-
ceived observations. In that way, each tracker main-
tains a discrete distribution over the global identities,
the modes of that distribution being the most likely
identities.
The state estimation is a two-stage process. First
we compute the Maximum A Posteriori over the dis-
crete parameter relatively to the current observation
Z
t
with equation (3), i.e. the most likely identity at
time step t.
ˆ
id
t
= argmax
j
P(id
t
= j|Z
t
) = arg max
j
∑
p∈ϒ
j
w
(p)
tr
(t), (3)
where ϒ
j
=
n
p|X
(p)
t
= (x
(p)
t
, j)
o
Then, the continuous components are estimated
over the subset of particles
ˆ
ϒ which have that most
likely identity, following equation (4).
ˆ
x
t
=
∑
p∈
ˆ
ϒ
w
(p)
tr
(t) · x
(p)
t
/
∑
p∈
ˆ
ϒ
w
(p)
tr
(t), (4)
where
ˆ
ϒ = {p|X
(p)
t
= (x
(p)
t
,
ˆ
id
t
)
T
}
That way, on top of target image position estima-
tion, each filter provides a discrete identity distribu-
tion for its target.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
98

4 TOPOLOGICO-TEMPORAL
SUPERVISION OF THE
REIDENTIFICATIONS
Section 3 has presented a reidentification strategy in-
tegrated to the image plane tracking. That strategy has
been established as superior to an exhaustive compar-
ison to the database by (Meden et al., 2011). Its lim-
itation resides in the distributed aspect of the mixed-
state filters. Indeed, the probability densities over the
target identity are independent from one filter to an-
other. Thus, two filters may produce the same identity
at the same time for two different targets. We wish
here to constrain the process, so that it produces ex-
clusive trackers/identities pairing. This is done at the
network level.
4.1 Identities Tracklets Generation
4.1.1 Using the Topology
In this part, we suppose to have access to the topol-
ogy of the network we monitor. This topology is rep-
resented by a non-oriented graph G = (V,E), which
vertices V represent entry/exit areas in the cameras,
and which edges E give existing transitions between
these areas, as illustrated in figure 4.
This fixed a priori here, could be learned online
with methods such as (Chen et al., 2008).
Figure 4: Network topology modelling. A non-oriented
graph link entry/exit areas of the adjacent cameras.
4.1.2 Temporal Integration
Each tracker produces at each time step a discrete
probability distribution over the set of identities, com-
puted as the ratio of particles dedicated to one iden-
tity. These probabilities are aggragated over a time
window in a Dynamic Programming manner. Fol-
lowing (Wojek et al., 2010), we speak here of track-
lets over the identities. Doing so, we build an asso-
ciation matrix between trackers and identities using
equation (5).
The use of the network topology comes in at
that point. It is used to suppress the impossible
tracker/identity associations. We start from an initial
localization of the identities in the network. At every
termination of a tracker, this localization is updated
with its reidentification. We use that localization to
set to null the associations that violate this localiza-
tion. An association is violating it if the tracker’s area
is not connected to the last localization of the pro-
posed identity.
S(tr
t
0
+T
,id
t
0
+T
) = p (id
t
0
+T
|zone(tr
t
0
)) ·
T
v
u
u
t
t
0
+T
∏
t=t
0
+1
Card
ϒ
tr,id
t
(5)
o ϒ
tr,id
t
=
n
p|X
(p)
t
= (x
(p)
t
,id
t
)
T
o
and where
p(id|zone(tr)) =
1 si localization[id]=zone(tr) ;
0 sinon.
4.1.3 Association Exclusivity
A greedy exclusive association similar to the one de-
scribed in section 3, is performed. It works using the
similarity function (5) and produces and exclusive as-
sociation tracker/identity at the end of the time win-
dow. The topology, and the preceding reidentification
come to suppress impossible configuration. Finally,
the association forces exclusivity in the pairing.
The management of the global identities at the
core of the tracking process allows us to skip combi-
natory problems inherent when handling multiple tar-
gets and to maintain up-to-date the positions of these
identities in the network.
4.2 Tracklets Optimisation over a
Tracking Sequence
These supervised affectations come at the end of each
time window, and give the re-identification during the
next time window. We obtain here short period re-
identifications, which we call identity tracklets. Fig-
ure 5 presents different tracklets of identities infered
by the supervisor for a tracking sequence. Each color
refers to an identity in the database.
To avoid a reidentification process biased on the
begining of the tracking sequence, we settle the iden-
tity distribution in the mixed-state filters back to
equiprobability at the end of each time window. That
TRACKING-BY-REIDENTIFICATION IN A NON-OVERLAPPING FIELDS OF VIEW CAMERAS NETWORK
99
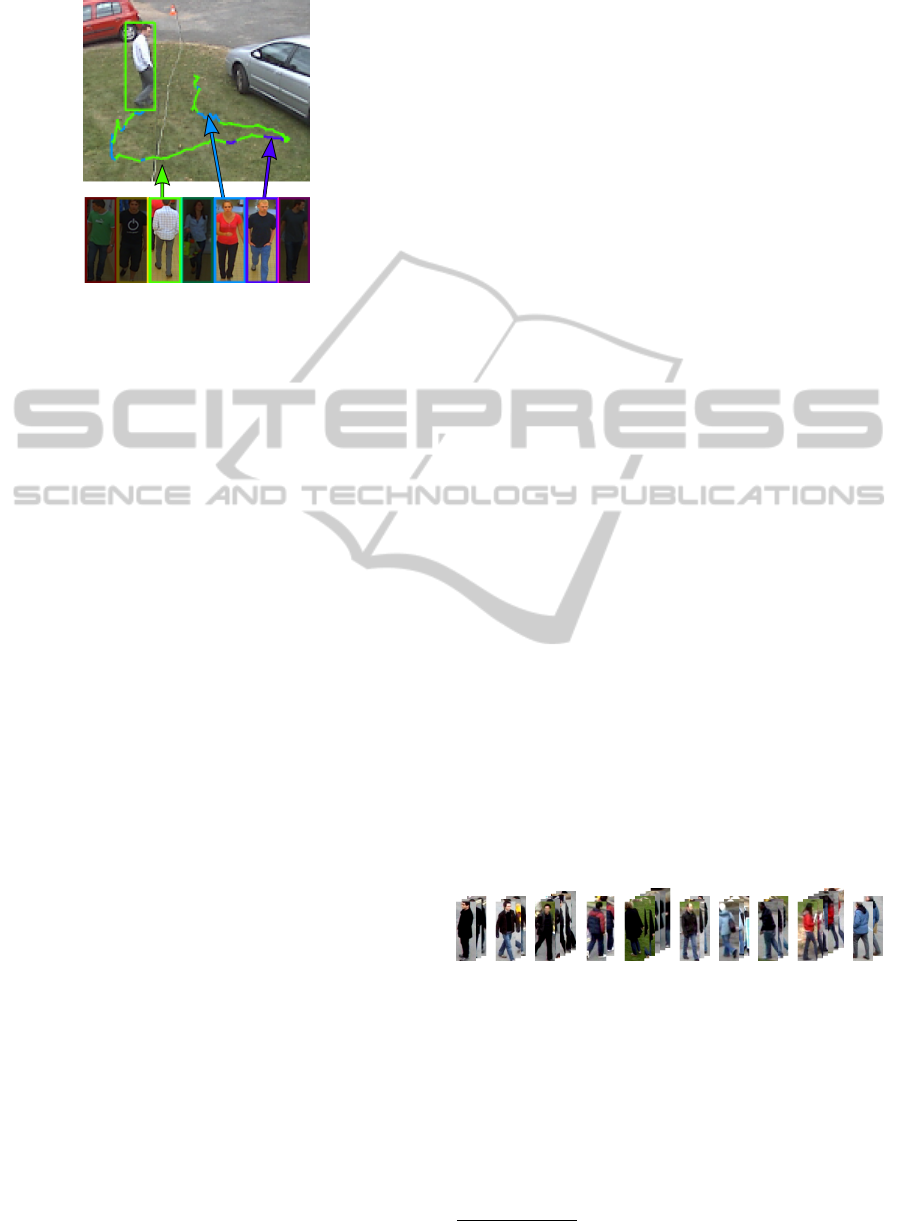
Figure 5: Different identity tracklets during a tracking se-
quence (better viewed in colors).
way, the mixed-state reidentification filter explores
again each identity and converge towards the most
likely, relatively to the observations it receives.
For each active tracker, these reidentifications are
binned into an histogram indexed over the identities.
Following Dynamic Programming principles, the cur-
rent affectation trackers / identities displayed is the
best solution found so far, i.e.the strongest mode of
that histogram. In the same way, when a tracker is
stopped, the re-identication affected is the strongest
mode, and the localization in the topological graph of
that identity is updated.
5 IMPLEMENTATION AND
ASSOCIATED EVALUATIONS
5.1 Implementation
Our IP network has an average framerate of 16 im-
ages per second. We thus fix ∆t = 1/16s in the evolu-
tion model of the particles filters. In the observation
model, equation (2), we fix empirically:
α = 0.90, β = 0.05 and γ = 0.05 if I (tr) = 1
(Breitenstein et al., 2010)
α = 0.0, β = 0.8 and γ = 0.2 else,
(Meden et al., 2011).
In the supervisor, the time window length is set to 7
images, which correspond to the average convergence
time of the mixed-state filters towards their identity.
5.2 Evaluations
5.2.1 Datasets
We evaluate the different component of our approach
on two different datasets. First, we test the tracking
module without and with reidentification activated on
the sequence PETS’09 S2L1
1
. This public dataset,
composed of 795 frames, presents an open outdoor
area, where 10 pedestrians wander, with crossings and
enterings/exitings. Having labeled these data, we are
able to quantify the quality of our tracking algorithm.
Considering the lack of public datasets in terms
of NOFOV network, we evaluate the supervision part
on a private sequence which we call the NOFOVNet-
work sequence in the sequel. It presents a total of
7 pedestrians wandering between 3 cameras. There
is no overlapping between the cameras field of view.
Two of them are placed in a building corridor, the
third one monitoring an outside area with a configura-
tion similar to PETS’09. The dataset has 837 frames.
We plan to release publicly these data.
5.2.2 Metrics
We use the CLEAR MOT (Bernardin and Stiefelha-
gen, 2008) to quantify tracking results. We obtain
a precision score MOTP (Multiple-Object Tracking
Precision) computed as the intersection over the union
between tracking boxes and ground truth, and an ac-
curacy score MOTA (Multiple-Object Tracking Ac-
curacy) taking into account false positives, false neg-
atives and switching trackers between targets.
Moreover, we evaluate the reidentification perfor-
mances by a True Reidentification Rate (TRR), com-
puted as the ratio of correct reidentification over the
number of trials. Given that the supervisor operates
on a time window, these TRRs are updated only at the
end of these time windows.
5.3 Camera Level Performances
5.3.1 Global Identity Notion
Figure 6: Key-frames of the 10 identities in the PETS se-
quence.
Figure 6 gives an overview of the identity database
we used on the sequence PETS’09. Here there is
only one camera. Thus, the database images are taken
from the test sequence. The goal here is to illus-
trate the tracking-by-reidentification, compare its per-
formances without reidentification and highlights the
new modality it offers.
1
http://www.cvg.rdg.ac.uk/PETS2009/a.html
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
100

(a) (b)
Figure 7: Results from (Breitenstein et al., 2010) (a) Be-
tween frames 204 and 241 the highlighted person exit and
enter again the scene. The new tracker is matched with the
old trajectory on a spatial criterion. (b) A similar situation
happens between images 390 and 445. However that time, it
is a different person who enters. The new tracker is matched
again with the previous trajectory. Here this is a reidentifi-
cation failure as the person is different.
Figure 8: Interest of using reidentification embedded in the
multi-target tracking: in (a) as like as in (b), the system re-
identifies the target relatively to the identity database, and
detects that in (b) the person entering is not the same as the
exiting one.
Figures 7 and 8 illustrate the limitation of han-
dling only local identities when targets exit and then
re-enter the scene. On figure 7, when the person exits
and a new one enters, the trajectory of the preceding is
matched with the new one. (Breitenstein et al., 2010)
just use a simple spatial criterion, no reidentification
is involved in that matching. It works on figure 7(a)
as the person is the same, but not on figure 7(b) as the
person is different.
In our case (figure 8), at each time step, each
tracker provides a probability distribution for the
observed identity. This allows us to tolerate peri-
ods without observations like exits from the camera.
When the target re-enter, the tracker searches again
the correct identity.
5.3.2 Quantitative Analysis
Table 1 presents quantitative results on the PETS’09
sequence. First, we validate our partial implemen-
tation of (Breitenstein et al., 2010) (without HOG +
ISM detector, detector confidence use in the obser-
vation model, and Boosting Online based appearance
model).
However, our approach presents an extra modal-
ity with the notion of global identity. We show first
that the introduction of mixed-state particle filtering
does not decrease much tracking performances. To
do so, we compare MOTP and MOTA for our imple-
mentation without and with the reidentification mod-
ule activated. Then, this extra modality allow us to
compute TRR for the sequence. Finally, we compare
the reidentification results of the distributed mixed-
state filters alone against the supervised ones. There,
exclusivity constraints (section 4) yield improved re-
sults.
The stochastic aspect of particle filtering has been
taken into account in our experiences: table 1 shows
results averaged over ten repetitions of tracking.
Table 1: CLEAR MOT metrics tracking results (Bernardin
and Stiefelhagen, 2008) and true reidentification rates on
the monocamera sequence PETS’09 S2L1. We give here
Multi-Object Tracking Precision (MOTP), Multi-Object
Tracking Accuracy (MOTA), and True Reidentification
Rate (TRR) defined in section 5.2.
Sequence PETS’09 MOTP MOTA TRR
Tracking-by-detection 56.3% 79.7% -
(Breitenstein et al., 2010)
Tracking-by-detection 42.7% 77.9% -
implemented
Tracking-by-Reidentification 42.5% 77.7% 59.7%
Tracking-by-Reidentification 42.4% 75.9% 64%
supervised
5.4 Supervisor Performances
The NOFOVNetwork sequence being not annotated
for the tracking, we just present true reidentification
rates for that sequence. We compare here the method
based only on colorimetric information and particle
TRACKING-BY-REIDENTIFICATION IN A NON-OVERLAPPING FIELDS OF VIEW CAMERAS NETWORK
101
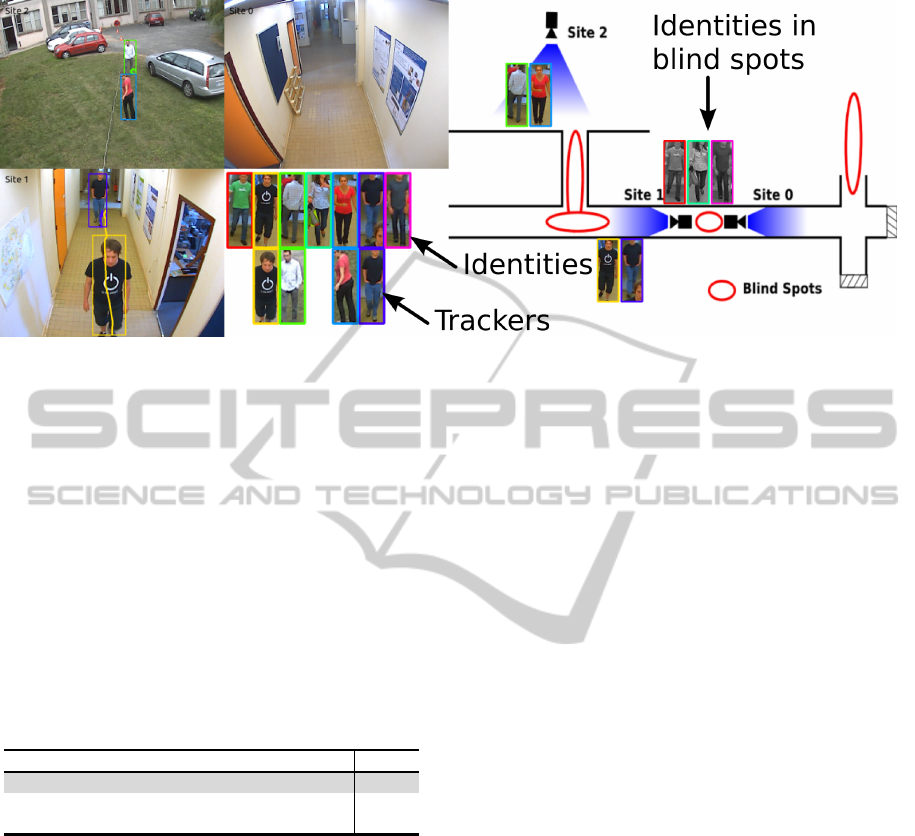
Figure 9: Network tracking example: output of our system with camera tracks matched to global identities (left), allowing to
localize them in the topology (right).
filtering inspired by (Meden et al., 2011), with the su-
pervised system we propose in section 4 which in-
cludes exclusivity and topological constraints.
Table 2 presents true reidentification rates per
camera, and for the whole network. The database be-
ing built with descriptors taken from camera 1, this
explains better TRR in that camera. These results il-
lustrate the contribution of the supervisor. Each cor-
rectly re-identified target constrains the system in the
sequel through the topology.
Table 2: True Reidentification Rates for each camera of the
sequence NOFOVNetwork: comparison of the approaches
without, and with supervisor on the network.
NOFOV Sequence cam0 cam1 cam2 network
Tracking-by-Reidentification 43.7% 67.3% 55.5% 54.6%
Tracking-by-Reidentification 67.7% 76.9% 63.8% 68.2%
supervised
Finally, figure 9 gives an overview of our system
output. Left, the cameras of the network display cur-
rent tracks, and right, the identities are localized in the
topology.
6 CONCLUSIONS
This article deals with non-overlapping fields of view
cameras networks monitoring, aiming at localizing
the targets in the topology. This is achieved through
the concept of global identity. We present here a
two stage tracking-by-reidentification method, based
respectively on colorimetric signatures and spatio-
temporal constraints in the network.
The camera level is treated by a markovian
tracking-by-detection inspired by (Breitenstein et al.,
2010), enhanced by the concept of global identity
taken into account in the mixed-state particle filter
framework. Thus, each tracker builds a discrete iden-
tity distribution for its target. Doing so, it integrates a
re-initialisation capacity after the target’s exit.
These identity distributions, considered as track-
lets over the identities are filtered spatio-temporally
by a supervisor. This one forces exclusivity between
reidentifications and insure consistency regarding the
network topology.
A first extension resides in the database online
learning and updating to achieve a fully automatic
system. Further work will also investigate a more en-
hanced appearance model, e.g. trained online on its
target. Finally, additional knowledge about the scene
(e.g., a ground plane to improve targets size estima-
tion) would be beneficial.
REFERENCES
Bernardin, K. and Stiefelhagen, R. (2008). Evaluating mul-
tiple object tracking performance: the clear mot met-
rics. Journal on Image and Video Processing.
Breitenstein, M., Reichlin, F., Leibe, B., Koller-Meier,
E., and Van Gool, L. (2010). Online multi-
person tracking-by-detection from a single, uncali-
brated camera. Pattern Analysis and Machine Intel-
ligence.
Chen, K., Lai, C., Hung, Y., and Chen, C. (2008). An adap-
tive learning method for target tracking across multi-
ple cameras. In Int. Conf. on Computer Vision and
Pattern Recognition.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In Int. Conf. on Computer
Vision and Pattern Recognition.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
102

Farenzena, M., Bazzani, L., Perina, A., Murino, V., and
Cristani, M. (2010). Person re-identification by
symmetry-driven accumulation of local features. In
Int. Conf. on Computer Vision and Pattern Recogni-
tion.
Gray, D. and Tao, H. (2008). Viewpoint invariant pedestrian
recognition with an ensemble of localized features. In
Europ. Conf. on Computer Vision.
Isard, M. and Blake, A. (1998). A mixed-state CONDEN-
SATION tracker with automatic model-switching. In
Int. Conf. on Computer Vision.
Isard, M. and Blake, A. (2001). BraMBLe: a Bayesian mul-
tiple blob tracker. In Int. Conf. on Computer Vision.
Kaucic, R., Perera, A., Brooksby, G., Kaufhold, J., and
Hoogs, A. (2005). A unified framework for tracking
through occlusions and accross sensor gaps. In Int.
Conf. on Computer Vision and Pattern Recognition.
Kuhn, H. (1955). The hungarian method for the assignment
problem. Naval research logistics quarterly.
Kuo, C., Huang, C., and Nevatia, R. (2010). Inter-camera
association of multi-target tracks by on-line learned
appearance affinity models. In Europ. Conf. on Com-
puter Vision.
Lev-Tov, A. and Moses, Y. (2010). Path recovery of a dis-
appearing target in a large network of cameras. In Int.
Conf. on Distributed Smart Cameras.
Meden, B., Sayd, P., and Lerasle, F. (2011). Mixed-State
Particle Filtering for Simultaneous Tracking and Re-
Identification in Non-Overlapping Camera Networks.
In Scandinavian Conference on Image Analysis.
Okuma, K., Taleghani, A., De Freitas, N., Little, J., and
Lowe, D. (2004). A boosted particle filter: multitarget
detection and tracking. In Europ. Conf. on Computer
Vision.
Qu, W., Schonfeld, D., and Mohamed, M. (2007). Dis-
tributed bayesian multiple-target tracking in crowded
environments using multiple collaborative cameras.
Int. Journal EURASIP.
Wojek, C., Roth, S., Schindler, K., and Schiele, B. (2010).
Monocular 3D scene modeling and inferences: under-
standing multi-object traffic scenes. In Europ. Conf.
on Computer Vision.
Zajdel, W. and Kr
¨
ose, B. (2005). A sequential bayesian
algorithm for surveillance with nonoverlapping cam-
eras. Int. Journal of Pattern Recognition and Artificial
Intelligence.
TRACKING-BY-REIDENTIFICATION IN A NON-OVERLAPPING FIELDS OF VIEW CAMERAS NETWORK
103
