
FORMALIZATION OF AN RNA-INSPIRED MIDDLEWARE
FOR COMPLEX SMART OBJECT FEDERATION SCENARIOS
J
´
er
´
emie Julia
1
, Yuzuru Tanaka
1
and Nicolas Spyratos
2
1
Meme Media Laboratory, Hokkaido University, Sapporo, Japan
2
Laboratoire de Recherche en Informatique, Universit
´
e Paris-Sud 11, Paris, France
Keywords:
Ubiquitous Computing, Pervasive Computing, Service Federation, Smart Object.
Abstract:
This paper proposes a new approach to deal with the smart objects or smart mobile devices by proposing
a middleware framework inspired by RNA mechanisms in molecular biology. Our framework represents
complex application scenarios of autonomic federation of smart objects as catalytic reaction networks. Each
catalytic reaction is modeled as an RNA expressions from a DNA. Our framework is capable of dealing not
only with the two stereotyped scenarios of ubiquitous computing, i.e. location-transparent service continuation
and location-and/or situation-aware service provision, but also with much more complex federations scenarios
of smart objects.
1 INTRODUCTION
Nowadays, our environment is filled with computing
devices such as RFID tags, chips with sensors and/or
actuators, smart phones, PDAs, intelligent electronic
appliances, embedded computers, and access points
to network servers: computing devices called smart
objects (Tanaka, 2008)(Tanaka, 2010). However,
we are using only a tiny portion of their potential-
ities since we generally do not dynamically and/or
flexibly connect them to create a federated complex
ubiquitous environment. Ubiquitous computing has
been addressing just two stereotyped kinds of sce-
narios: location-transparent service continuation, and
location- and/or situation-aware service provision. It
was pointed out that the absence of formal model is an
obstacle preventing us from finding new kinds of sce-
narios (Milner, 2004)(Henricksen et al., 2002). Some
researchers are trying to extend the application target
of ubiquitous computing by using formal computation
models of process calculi, e.g., Bigraphical Reactive
System (Milner, 2001). These trials mainly focus on
mathematical description and inference of the behav-
ior of a set of mobile objects, but not those of the dy-
namically changing interconnection structures among
mobile physical objects based on abstract description
of their interfaces. That is why they are not sufficient
to describe new kinds of scenarios. A lot of other
studies have been conducted on the mathematical de-
scription of network topology for network reconfigu-
ration and rerouting. These studies focused on phys-
ical connectivity among nodes, but not on their logi-
cal or functional connectivity. Thus they cannot de-
scribe application frameworks. These models are not
sufficient to provide a basis for application frame-
works that go beyond the existing stereotyped sce-
narios. We believe that any essential extension be-
yond these stereotypes will require formal modeling
that can describe more complex federation scenarios
among smart objects.
In conventional research studies, federation mech-
anisms were based on the matching of a ser-
vice requesting message with a service provid-
ing message. This matching was made by a
centralized-and-repository lookup service (as in the
case of Linda(Gelernter, 1985)), or by a distributed
repository-and-lookup service (as in the case of
Lime(Picco et al., 1999)). However, the messages
to be matched depend on the implementation, which
tells why these architectures cannot describe dynamic
changes of federation structures independently from
the implementation defining the behavior of each
smart object. Our approach is focused on the feder-
ation of smart objects through their interfaces. Each
smart object has a set of ports corresponding to ser-
vice providing ports or to service requesting ports.
Thus the federation of the smart objects does not de-
pend on their implementation, nor on a repository-
and-lookup service. This means that, since our ap-
proach does not require any repository, we have a new
96
Julia J., Tanaka Y. and Spyratos N..
FORMALIZATION OF AN RNA-INSPIRED MIDDLEWARE FOR COMPLEX SMART OBJECT FEDERATION SCENARIOS.
DOI: 10.5220/0003818400960105
In Proceedings of the 2nd International Conference on Pervasive Embedded Computing and Communication Systems (PECCS-2012), pages 96-105
ISBN: 978-989-8565-00-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

federation model for purely P2P networks.
The formal models that we aim to provide deal
with the following three different levels:
• First Level: The port matching model is used
to describe federation and interoperation mecha-
nisms.
• Second Level: Graph rewriting rules are used to
describe dynamic change of federation structures.
• Third Level: The catalytic reaction network mod-
eling is used to describe complex application sce-
narios with mutually related more than one feder-
ation.
A catalytic network reaction is a network of catalytic
reactions in which a product of a reaction may work
as a source material for another reaction or as a cata-
lyst to enable (stimulus) or inhibit (inhibitor) another
reaction. In our research the materials are smart ob-
jects. To implement this system, we use what we call
nucleotide smart objects. The nucleotide smart ob-
ject framework is described at the second layer of our
formal model, i.e.; it describes the dynamic change
of federation structures. In this framework, smart ob-
jects have behaviors similar to the nucleotides in the
RNA world hypothesis. By simulating the replication
of RNA, we can describe all kinds of catalytic reac-
tion networks that we are interested in (i.e., federation
and unfederation with or without a stimulus as a cat-
alyst). This paper is focusing on the mapping from
the third level to the second level. In the next session,
we will define what a catalytic reaction network de-
notes. In the following section, we will shortly review
the definition of smart objects. After that, we will
show what nucleotide smart objects denotes and how
we can use them to model each reaction in catalytic
reaction networks. Then, we will present the global
state transition diagram that summarizes all the rules
of the nucleotide smart objects and helps us to explain
the whole process of implementing each catalytic re-
action. Finally, we will give an example application
of this new framework.
2 CATALYTIC REACTION
NETWORK
Stuart A. Kauffman believes that a collectively auto-
catalytic set is one of the essential mechanisms for the
self-organization of life (Kauffman, 2000). We be-
lieve that complex application scenarios of autonomic
federation of smart objects can be modeled as a cat-
alytic reaction network. A catalytic reaction network
is a set of reactions in which the product of each reac-
tion may work as a source material of another reaction
or as a catalyst to enhance or to repress another reac-
tion. Each reaction is either a composition to produce
a compound product from more primitive source ma-
terials, or a decomposition of a source material into
its component materials.
In our modeling, the materials are smart objects.
For example, Fig. 1 shows four reactions (R1, R2, R3
and R4).
All characters outside a circle represent a smart
object or a composite smart object. A reaction be-
tween them can happen with the influence of a stimu-
lus (for example the reaction R3 between PH and T to
produce PHT will happen only with the presence of
MI) or without the influence of a stimulus (for exam-
ple the reaction R1 between M and I to produce MI),
and with or without a specific context that is made of
smart objects and represented by an object in each re-
action circle. The result material of a reaction may
work as an input material (for example PH), or as a
stimulus (for example MI) of another reaction. Both
stimuli and contexts work as catalyst. Stimuli are mo-
bile, while contexts are immobile.
This application allows an automatic federation of
wireless headphones and PDA depending on the users
mobility in a museum. A user with a social ID card I
and a smart member card M passes a check-in gate G1
of an museum. This gate sets up a federation between
M and I to check if he is a registered member of this
museum. The user could pick up at the entrance of
the museum a headphone and a PDA. When he will
pass through a second gate G2 working as a context,
his PDA and headphone will be automatically con-
nected. Later when he will come close to a table T,
the federation MI works as a stimulus which may also
contain his preferences. The federated objects PDA-
headphone could become connected with the table to
retrieve the related information. The user will receive
sound and text contents in his favorite language and/or
in his favorite color contrast for the text. If the user
does not have a member card, he should have a ticket
u. If a user come close to a table T, through the influ-
ence of u, his federated PDA-headphone object will
not be connected with T, but with T’ that provides
generic information about the table T for non mem-
ber of the museum. No user operation is necessary to
set up the necessary connections of this scenarios.
P
H
PH
MI
T
PHT
C2
M: member card
I: social Id card
P: PDA
H: headphone
T: table
T': generic table
u: ticket
C1: first gate
C2: second gate
C3: table context
C4: generic table context
C3
C1
M
I
C4
T'
u
PHT'
R1
R2
R3
R4
Figure 1: Catalytic reaction network representing a scenario
of smart-object Federations.
FORMALIZATION OF AN RNA-INSPIRED MIDDLEWARE FOR COMPLEX SMART OBJECT FEDERATION
SCENARIOS
97

In addition, we have two kinds of reactions, com-
position and decomposition reactions respectively
corresponding to federating and defederating actions.
In this paper, we will focus on composition reactions
with a context and with or without a stimulus.
3 SMART OBJECT
In this section, we shortly review the definition of
smart objects (SOs).
3.1 Ports
Each port has:
• a type;
• a polarity, + or − (the + polarity means that the
port is a service-providing port; the − polarity
means that the port is a service-requesting port);
• an arity (a service-requesting port has an arity of
one; a service-providing port can have an arity
greater than one);
• a state, a port can be in one of the two states: Vis-
ible (V) or Hidden (H);
The type and polarity are permanent characteristics of
a port, whereas the state of a port can change.
A SO can have many ports but no two of them can
have the same type and the same polarity (but they can
have the same type if they have different polarities).
3.2 Connections
Here are described the characteristics of a connection
from a SO A to a SO B:
• There can be a connection from A to B only if A
has a requesting port and B has a providing port of
the same port type. The common port is defined
to be the type of the connection.
• There can be at most one outgoing connection
from a given port of a smart object.
• There can be any number of incoming connec-
tions to a given port of a smart object.
• There can be many connections from A to B using
different ports.
3.3 Smart Object Graph (SOG)
A smart object graph is an edge-labeled directed
graph without self loops, in which:
• The nodes are smart objects;
• There is an edge labeled t from a node A to node
B if there is a connection of type t from A to B.
• Each node is associated with the following five
properties:
– the smart object identifier denoted oid;
– the smart object type;
– the smart object state;
– the set of its visible ports;
– the set of its hidden ports;
The set of these properties is called the description
of the node. Note that, in a SOG, a path σ from a
source SO A to a target SO B is uniquely defined
by the sequence of the labels of its edges. This
follows from the fact that a requesting port can
have at most one connection.
A SOG is accompanied by another graph called
the proximity graph (PG) defined as follows:
• the nodes are those of SOG;
• there is an edge from A to B if B is in the scope of
A;
where the scope of A is defined to be the set of smart
object whose existence can be detected by A, say,
through wireless communication.
3.4 Graph Rewriting Rules
Graph rewriting rules are the second-level formal
modeling of proximity-based federation that was in-
troduced by (Tanaka, 2010). It focuses on the dy-
namic changes of interconnection structures among
smart objects in a single complex federation. This
model describes a rule as two SOGs. Both of them
are sharing the same nodes. The first one, called the
condition part, represents the condition of the appli-
cation of the rule. The second, called the action part,
corresponds to the change result of the condition part
after applying some primitive actions. The case where
the rule can be applied is illustrated by showing the
condition on the left hand side. The result of the rule
application is specified by the SOG on the right hand
side. The condition part SOG can be extended with
edges from its proximity graph.
Primitive Conditions. Each primitive condition is
presented in Fig. 2. The gray node means the smart
object that checks each condition and executes the
rule. It is called the activated node. For each con-
dition, the path σ may be of length zero. A proximity
graph edge is represented by a dotted arrow.
Port Condition
: the σ object has a certain port p
in a certain state. The letter “v” is used for the visible
state, and the letter “h” for the hidden state.
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
98
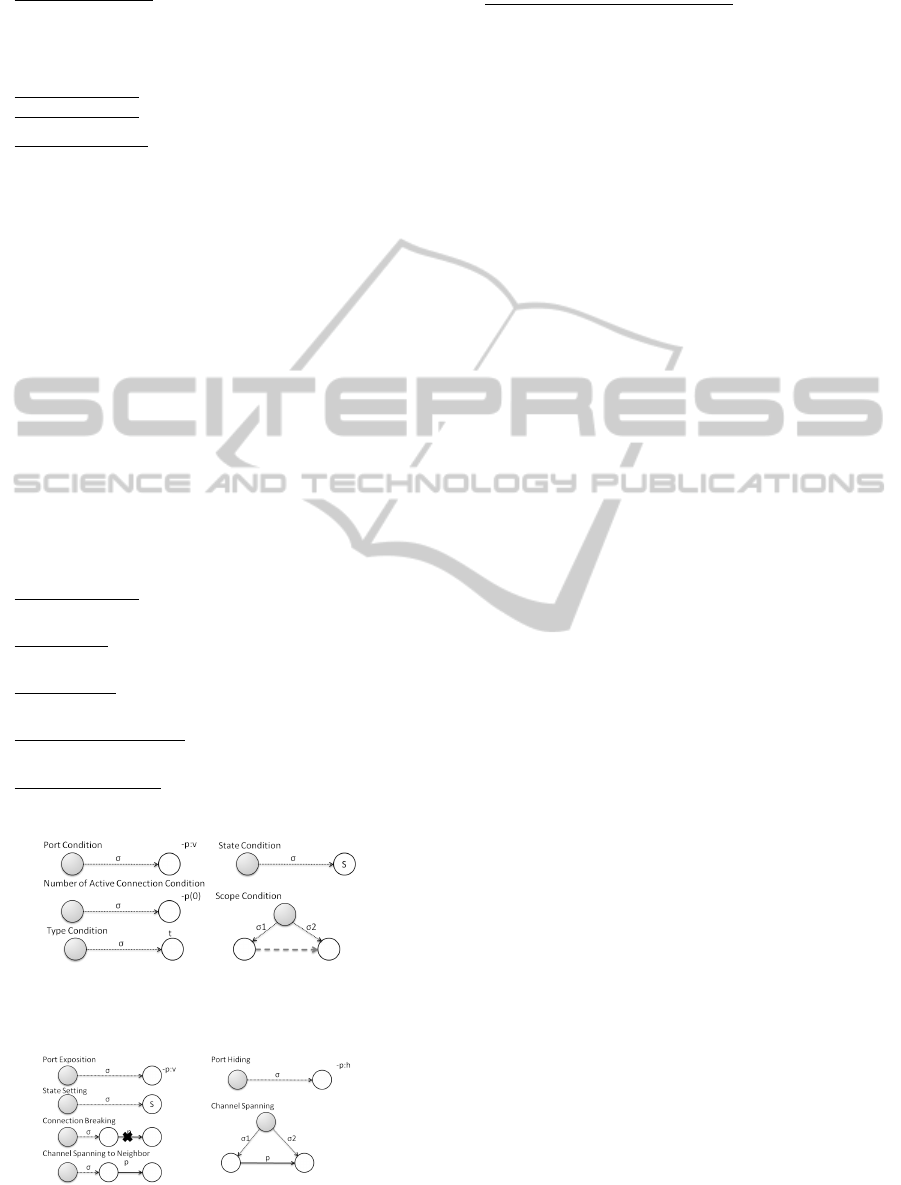
Port Connections: the σ object has a port with a
certain number of active connections (0 is the exam-
ple). Note: the notation -p:v(1) denotes that a port -p
is visible with 1 active connection.
Type Condition: the σ object is of type t.
State Condition: the σ object has the state S.
Scope Condition: the σ2 object is in the scope of
the σ1 object.
We defined a list of commands that will be used
to check the previous conditions and allow to get the
oid, the type, the state, the state of one of the ports, the
number of active connections of one of the ports, the
presence of a σ2 object in the scope, and the presence
of an object with a certain port in the state visible in
the scope of a σ object.
We defined a list of commands that will be used to
check the previous conditions and allow us to get for
a σ object its oid, its type, its state, the state of one
of its ports, the number of active connections of one
of its ports, the presence of a σ2 object in its scope,
and the presence of an object with a certain port in the
state visible in its scope.
Primitive Actions. Each possible action is shown
in Fig. 3.
Port Exposition: the activated node makes the port
-p of the σ object visible.
Port Hiding: the activated node makes the port -p
of the σ object hidden.
State Setting: the activated node sets the state of
the σ object to S.
Connection Breaking: remove the edge labelled p
from the σ object.
Channel Spanning: span an edge labelled p from
the σ1 object to the σ2 object.
Figure 2: Primitive conditions that can be used in graph
rewriting rules.
Figure 3: Primitive actions that can be used in graph rewrit-
ing rules.
Channel Spanning to Neighbor: span an edge la-
belled p from the σ object to an object with a -p port.
We defined a list of commands that will be used
to execute the previous actions and allow us to get for
a σ expose of hide one of its ports, to set its state, to
span or to break a connection to a σ2 object or to an
object in its scope.
Complex Rules. As shown in Fig. 9, it is possible
to combine the different primitive conditions and ac-
tions to define such a complex rule as the rule 2. For
σ1 = nil, and σ2 = B[x], this rule check that the σ1
object and the σ2 object have the state a and 0, and
that the σ1 object is in the scope of the σ2 object. The
actions consists to set the state of the σ1 object and
the σ2 object to c and 2, and to span a connection
from the σ2 object to the σ1 object through the port
B[x].
4 NUCLEOTIDE SMART
OBJECTS AS ELEMENTS OF
CATALYTIC REACTION
NETWORKS
4.1 Nucleotide Smart Objects
Nucleotide smart objects (NSOs) are a solution to im-
plement the primitives of the third layer: the catalytic
reaction network. The idea is to emulate the RNA
replication process in the smart object world to design
reactions of a catalytic reaction network in a generic
way.
We use different types of NSOs corresponding to
different types of SOs. For example, PDAs, credit
cards, or earphones are different types of SOs. We
use a different type of NSOs for each different type of
them. A NSO of subtype t is a SO in which there are
exactly four ports:
• two ports with the same type L; one of them
is service-requesting and the other is service-
providing, hence denoted as -L and +L respec-
tively;
• two ports with the same type; the type of these
ports is dependent of the subtype of the NSO. It
is denoted as B[t] where t is the subtype of the
NSO; one of them is service-requesting and the
other is service-providing, hence denoted as -B[t]
and +B[t] respectively;
• each of these ports can have at most one connec-
tion at any given moment;
FORMALIZATION OF AN RNA-INSPIRED MIDDLEWARE FOR COMPLEX SMART OBJECT FEDERATION
SCENARIOS
99

Strand of Nucleotide Smart Objects. Before
defining the inputs of a reaction, we define a strand
as an SOG, and some operations on a strand. A strand
is a maximal acyclic path such that:
1. all nodes are NSOs;
2. all edges have the same label L;
3. no two nodes in the path are connected by a B
edge.
Given a strand V : v
1
→ v
2
→ ··· → v
n
, a comple-
ment of V is defined to be any strand
¯
V such that:
1.
¯
V : u
1
→ u
2
··· → u
n
2. type(u
i
) = type(v
n−i+1
), i = 1, ··· , n
4.2 Inputs Strands of a Reaction
The input materials of a reaction may be a set of k
input strands, V
1
·· ·V
k
; there is at most one distin-
guished input strand that plays the role of a stimu-
lus. We assume (without lost of generality) that, if a
stimulus is involved, the strand V
1
is the stimulus. We
also assume that each NSO of subtype t used in input
strands is already federated with a SO of type t. For
example in Fig. 4, you have an example of the input
materials of the context C3 presented in Fig. 1.
4.3 Context of a Reaction
Another element of a reaction is a strand called con-
text defined as follows:
¯
V
1
→ S
1
→
¯
V
2
→ S
2
→ ··· →
¯
V
k−1
→ S
k−1
→
¯
V k
where type(S
i
) = I (Input separator) , i = 1, ··· , k − 1
and if V
1
is a stimulus, then type(S
1
) = S (Stimulus
separator).
Later, each
¯
V
i
of a context is called a docking part.
For example in Fig. 5 is presented the implemen-
tation of the context C3 presented in Fig. 1.
Figure 4: Input materials of the reaction R3 in Fig. 1 using
C3 and MI as its context and stimulus.
Figure 5: The context C3 of the reaction R3 in Fig. 1.
4.4 Output of a Reaction
If V
1
is a stimulus, then the output is
V
2
→ V
3
→ ··· → V
n
; else, the output is
V
1
→ V
2
→ ··· → V
n
.
In Fig. 8 is presented the output of the reaction
that happens in the context C3.
4.5 Implementation of a Reaction
A context strand will work as a template defining how
to federate the objects. For example C3 (Fig. 5) is a
context of a reaction accepting as input a stimulus MI
and two input materials PH and T. When the corre-
sponding SOs M, I, P, H and T attached to their NSOs
(Fig. 4) enter in the scope of the context C3, each
NSO of the input strands become automatically con-
nected to the corresponding docking part of the con-
text (Fig. 6). After this step, the connection among
the NSOs in the context through the ports L is repli-
cated in the opposite direction among the NSOs in the
stimulus and in the input materials (Fig. 7).
There, we first need to break all the connections
between the context strand and both the stimulus and
the input materials, and then need to break the con-
nection between the stimulus and the object P. As a
result, we have the federation PHT (Fig. 8).
Figure 6: The docking of the stimulus strand and two input
strands.
Figure 7: Composition of an output strand from two input
strands.
Figure 8: The undocking ot the stimulus strand and the out-
put strand.
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
100

Because T is indirectly connected to H and P
through the NSOs, some software that had been stored
in the context can be sent to T to establish arbitrary di-
rect connections among the three SOs P, H and T.
Suppose that the object P can be any kind of these
PDAs. We can consider for example a Microsoft Win-
dows Mobile PDA, and a Palm OS PDA. We can
develop a NSO, for the Microsoft Windows Mobile
PDA and another for the Palm OS PDA, having the
same subtype “N
PDA
”, and will communicate with
other NSOs with the same protocol. We will be able
to use all these different PDAs in the same federation
context without redesigning them.
All the reactions designed in the same way share
the same implementation structure. This structure is
composed of:
• the first layer, that is called the first strand or the
context;
• the second layer, that is called the second strand,
corresponding to the set of input strands;
• the third layer, corresponding to the SOs, work-
ing as a stimulus or as input materials, to be com-
bined.
The rest of the paper will focus on the first and sec-
ond layers of the structure, i.e., the first strand and the
second strand.
4.6 Graph Rewriting Rules for
Nucleotides Smart ObjectS
We assume that the context is manually constructed
as follows.
• The first node of the context has the state 0 and
the ports +B[N
i
] : v(0), −B[N
i
] : h(0), +L : h(0)
and −L : h(1).
• The last node of the context has the state: 1 and
the ports +B[N
i
] : h(0), −B[N
i
] : h(0), +L : h(1)
and −L : h(0).
• Each intermediate node of the context has the
state 1 and the ports +B[N
i
] : h(0), −B[N
i
] : h(0),
+L : h(1) and −L : h(1).
The context with the above mentioned nodes is said
to be in the initial state. As we shall see, after obtain-
ing the output, the context is automatically reset to its
initial state.
In each input strand, if a strand contains a single
node, then the description of this node includes the
followings:
• the state a and the ports +B[N
i
] : h(0),
−B[N
i
] : v(0), +L : h(0) and −L : h(0);
else, the description of these nodes includes the fol-
lowings:
• The first node of the input strand has the state
b and the ports +B[N
i
] : h(0), −B[N
i
] : v(0),
+L : h(1) and −L : h(0).
• The last node of the input strand has the state a and
the ports +B[N
i
] : h(0), −B[N
i
] : h(0), +L : h(0)
and −L : h(1).
• The last node of the input strand has the state
1 and the ports +B[N
i
] : h(0), −B[N
i
] : h(0),
+L : h(1) and −L : h(1).
We will make an assumption that the connections
are stable and not broken unless explicitly broken.
Furthermore, we will assume that we will get only
the expected input strand for each docking part. If not,
and if the input strand has already started to dock with
the docking part, we should undock the input strand,
and try to find another one. The rules managing un-
expected input strands, however, will not be given in
this paper because of the page limitation.
In the Fig. 9 are presented the graph rewriting
rules of the NSOs. For the rules 1 to 15, when the type
of a SO is not specified, the type is N. In the rules 16
to 22, a smart object can be of type N, S or I. By fol-
lowing these rules, step by step, the input strings will
dock at the docking part of the context from left to
right, and then the different input strings will horizon-
tally be connected together. The NSOs are undocked
from the context from right to left. Then we get a new
federation of NSOs corresponding to the federation
of the different input strings. This new federation is
called the output material of the reaction and it can be
used as an input string of another reaction.
5 CORRECTNESS OF THE
GRAPH REWRITING RULES
FOR NSOS
It is difficult to visualize and to verify the full pro-
cess that is obtained from these rules. To solve this
problem, here, we will introduce a Global State Tran-
sition Diagram (GSTD) to summarize the rule exe-
cution process. The first part of this section presents
the graph rewriting rules as mathematical rules and
how to generate the global state transition diagram
corresponding to these mathematical rules. The sec-
ond part of this section is a description of the GSTD
that is obtained from the NSO graph rewriting rules.
And in the third part, we use this GSTD to explain the
whole process of a reaction.
FORMALIZATION OF AN RNA-INSPIRED MIDDLEWARE FOR COMPLEX SMART OBJECT FEDERATION
SCENARIOS
101

0
a
0
a
Rule 1(x)
2
Rule 3(x,y)
1
b
L
L
2 2
c
L
L
+B[x]:v(0)
-B[x]:v(0)
B[x]
B[x]
B[x]
B[x]
B[x]
B[y]
c
d
B[y]
+B[y]:h(0)
-B[y]:h(0)
+B[y]:h(0)
-B[y]:h(0)
B[x]
Rule 5(x,y)
e
L
e
L
d
2
B[y]
B[y]
2
B[y]
B[y]
2
B[x]
2
B[x] B[x]
L
2 1
L
1
L
Rule 7(x,y) (or7’ (x,y))
6 2
L
7
L
S (or I) S (or I)
B[x]
B[T
i
]
B[x]
c c
7
a
7
Rule 8(x)
B[x]
2
L
2
L
e
2
L
2
L
L
S (or I) S (or I)
B[x]
B[x]
B[y]
B[y]
B[x]
B[x]
B[y]
B[y]
8 2
f c e
B[y]
f
L
f
2
B[y]
3
Rule 13(x,y)
B[y]
f
L
h
3
B[y]
4
2
L
2
L
L
S
B[y]
B[y]
3
f f
Rule 14(x,y)
4
L
3
L
L
S
B[y]
B[y]
4
f f
Rule 4(x,y)
2 2
e
L
L
B[x]
B[x]
B[y]
d
B[y]
2 2
c
L
B[x]
B[x]
B[y]
d
B[y]
2
L
2
L
c
Rule 10(x,y) (or 10’ (x,y))
2
L
2
L
S (or I) S (or I)
B[x]
B[x]
B[y]
B[y]
B[x]
B[x]
B[y]
B[y]
6 8
e c c
Rule 6(x,y)
e
L
2
B[y]
B[y]
2
B[x] B[x]
L
f
L
2
B[y]
B[y]
3
B[x] B[x]
L
2
L
2
L
L
S (or I)
B[x]
B[x]
B[y]
B[y]
f e
2
L
2
L
L
S (or I)
B[x]
B[x]
B[y]
B[y]
f f
0
a
2
c
Rule 2(x)
B[x]
B[x]
B[x]
7
2
Rule 9(x)
B[x]
B[x]
B[x] B[x]
h g
L
Rule 21(x,y)
g
Rule 22(x)
a
f
Rule 19(x)
a
g b
L
f
h f
L
Rule 20(x,y)
g b
L
3
Rule 16(x)
5
4 5 5 1
Rule 17(x,y)
5 0
Rule 18(x)
2
3
2
L
2
L
L
I
B[y]
B[y]
3
f f
Rule 15(x,y)
4
L
3
L
L
I
B[y]
B[y]
4
f h
a
a
c
f
f
B[x]
+L:h(0) +L:h(0)
+L:h(0)
-L:h(0)
-L:h(0)
+L:h(0)
+B[y]:h(0) +B[y]:v(0)
+L:h(1)
+B[x]:v(0)
-L:h(0)
+B[x]:v(0)
+L:h(1)
-B[x]:v(0)
-L:h(0)
+B[x]:v(0)
+B[x]:h(0)
-B[x]:h(0)
-L:h(0)
+L:h(0) +L:h(0)
-L:h(0)
+L:h(0) +L:h(0)
+L:h(1)
+B[x]:v(1)
-L:h(0)
+B[x]:v(1)
Rule 11(x,y) (or 11’ (x,y))
+L:h(0)
+L:h(1)
Rule 12(x,y) (or 12’ (x,y))
-L:h(0)
+L:h(0)
-L:h(0)
+L:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[x]:h(0)
-B[x]:h(0)
-L:h(0)
+B[x]:h(0)
-B[x]:h(0)
-L:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[y]:h(0)
-B[y]:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[y]:h(0)
-B[y]:h(0)
+B[x]:h(0)
-B[x]:h(0)
+L:h(0)
-L:h(0)
+B[x]:v(0)
-B[x]:h(0)
+L:h(0)
+B[x]:h(0)
-B[x]:h(0)
+L:h(0)
-L:h(0)
+B[x]:h(0)
-B[x]:v(0)
+L:h(0)
-L:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[y]:h(0)
-B[y]:h(0)
+L:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[y]:h(0)
-B[y]:h(0)
+L:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[y]:h(0)
-B[y]:h(0)
+B[x]:h(0)
-B[x]:h(0)
+B[y]:h(0)
-B[y]:h(0)
+B[x]:h(0)
-B[x]:h(0)
-L:h(0)
+B[x]:h(0)
-B[x]:v(0)
-L:h(0)
+L:h(0)
-L:h(0)
-L:h(0)
+L:h(0)
+B[y]:h(0)
-B[y]:h(0)
+B[y]:h(0)
-B[y]:h(0)
+L:h(1)
-B[x]:v(0)
-L:h(0)
+B[x]:v(0)
Figure 9: Graph rewriting rules for nucleotides smart object.
5.1 Graph Rewriting Rules and their
Dependencies
5.1.1 Precondition and Postcondition
The precondition of a rule is the SOG in the condition
part of the rule, where we neglect all edges from the
proximity graph. The postcondition of a rule is the
SOG in the action part of the rule.
We define the following functions:
PreCd(R): to return the precondition of the rule R;
PostCd(R): to return the postcondition of the rule R.
5.1.2 Injective SOG Homomorphism
An injective SOG homomorphism (ISOGH) from an
SOG X to an SOG Y is an injection f from the nodes
of X to the nodes of Y such that:
• For every node n of X , n and f (n) have the same
type and the same state.
• For every node n of X , if both n and f (n) have
ports of the same port type and of the same polar-
ity, then these ports must have the same state and
the same number of active connections.
• For every edge in X labelled t from a node n
1
to a
node n
2
, there exists in Y an edge labelled t from
f (n
1
) to f (n
2
).
X is embedded in Y (denoted X ≺ Y ) if and only if
there exists an ISOGH from X to Y .
5.1.3 Joinability between Two SOGs
It is possible to join two SOGs X and Y through an
SOG Z if and only if it exists an ISOGH f
x
from Z to
X and another ISOGH f
y
from Z to Y such that:
• for every edge labelled t of X from a node n, is
there exists a node m in Z such that f
x
(m) = n,
them there is an edge with the same label t in Z
from the node m, or there is no such an edge in Y
from f
y
(m);
• for every edge labelled t of X to a node n, is there
exists a node m in Z such that f
x
(m) = n, them
there is an edge with the same label t in Z to the
node m, or there is no such an edge in Y to f
y
(m);
A join consists of replacing the nodes of X corre-
sponding to the nodes of Z by their respective cor-
responding nodes in Y to obtain a SOG W , as shown
in Fig. 10. The joinability function takes as its inputs
three SOGs X, Y and Z, and returns 1 as its output if
the two SOGs X and Y can be joined through a com-
mon SOG Z, or 0 otherwise.
In the example shown in Fig. 10 f
x
1
and f
x
2
are
two ISOGHs from Z to X, f
y
1
is one ISOGH from Z
to Y and the node ids are written in the black box.
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
102

Figure 10: Example joinability between two SOGs.
For example, let us consider the two SOG homo-
morphisms f
x
1
and f
y
1
in Fig. 10. It is not possible to
join X and Y through Z because there is an edge la-
belled L in X from the node f
x
1
(5) (corresponding to
the node 1), but there is no edge with the same label
L in Z from the node 5, and furthermore, there is an
edge with the same label L in Y from f
y
1
(n) (corre-
sponding to the node 7).
However, if we consider the two ISOGHs f
x
2
and
f
y
1
, it is possible to join the two SOGs X and Y , be-
cause,
• for every edge labelled t of X from a node f
x
2
(n),
either there is an edge with the same label t in Z
from the node n, or there is no edge with the same
label t in Y from f
y
1
(n) , and
• for every edge labelled t of X to a node f
x
2
(n),
either there is an edge with the same label t in Z
to the node n, or there is no edge with the same
label t in Y to f
y
1
.
5.1.4 Modified Part of a Postcondition
The modified part of a postcondition of a rule R is a
subgraph of this postcondition that is obtained by re-
moving all the edges that keep the same description
and/or keep the same adgency nodes with the same
edges, between the precondition of R and the post-
condition of R.
We define a function ModPostCd(R) that returns
the modified part of the postcondition of the rule R as
an SOG. For example, in Fig. 11 ModPostCd(R) is
the SOG within an oval.
Figure 11: The modified part of the postcondition of an ex-
ample rule.
5.1.5 Rule Dependency
Let SOGs be the set of all the possible SOGs.
The rule dependency (RD) is a directed graph
D
D
= (V
D
, E
D
) where the set V
D
of vertices is the set
of rules and the set E
D
of edges is defined as the fol-
lowing set:
E
D
= {(R, S)|(R, S) ∈ V
2
D
∧
∃F ∈ SOGs (∃G ∈ SOGs
(G ≺ F ∧ G ≺ ModPostCd(R))∧
joinability(PostCd(R), PreCd(S), F) = 1))}
(1)
An edge from a rule R to a rule S denotes that
the execution of the rule R may lead to the trigger-
ing of the rule S. the execution of a rule R may trig-
ger the execution of a rule S if and only if it is possi-
ble to join PostCd(R) and PreCd(S) through an SOG
F, and if this SOG F contains at least one node of
ModPostCd(R).
5.1.6 Extended Rule Dependency
The extended rule dependency (ERD) is a directed
graph where the set of vertices is the set of precon-
ditions and postconditions of the rules. It has an solid
edge from the precondition to the postcondition of the
same rule. It has also an dotted edge from a postcon-
dition of one rule to a precondition of another rule if
there exists an edge in the rule dependency from this
postcondition this precondition.
5.2 Global State Transition Diagram
The GSTD is defined based on the simplified ERD di-
agram. The GSTD shown in Fig.12 summarizes only
the rule 1 to 15 presented in Section 4.6. Each vertex
of this diagram represents an SOG (either a precondi-
tion, or a postcondition). Here, types and ports are not
specified. In each vertex, all the horizontal connec-
tions are made through ports -L and +L, and all the
vertical connections through ports −B[x] and +B[x].
We will use capital letters associated with each vertex
to refer to its SOG. Each solid edge between vertices
represents an execution of a rule, and is called a “tran-
sition”. Each number used as a label to a transition
corresponds to the number of the rule to be executed.
Each dotted edge from a postcondition of a rule R to
a precondition of a rule S denotes that, after the ex-
ecution of the rule R, an SOG corresponding to the
precondition of the rule S may be obtained and the
rule S may be executed. For example, in Fig. 13, by
making the transition C to D, the SOG D is obtained.
At the same time, D also creates I. Thus, dotted edges
are called “transition dependencies”. Each transition
FORMALIZATION OF AN RNA-INSPIRED MIDDLEWARE FOR COMPLEX SMART OBJECT FEDERATION
SCENARIOS
103

Figure 12: A part of the global state transition diagram for the graph rewriting rules in Fig. 9.
is identified by the concatenation of the source SOG
name and the destination SOG name. For example,
the transition from C to D is called the transition CD.
Figure 13: Transition dependency.
When in the RD diagram we have a sequence of
rules (R
1
, R
2
, ...R
n
) such that each rule (except R
n
)
has only one outgoing edge to its following in the
sequence, and each rule (except R
1
) has only one in-
coming edge from its predecessor in the sequence, we
define in the GSTD only the precondition of the first
rule of this sequence, and the postcondition of the last
rule of this sequence. For example, from the RD dia-
gram, we could see that after the execution of the rule
7 (or the rule 7’), only the rule 8 can be executed, and
after the rule 8, only the rule 9 can be executed. Thus,
the transition IJ corresponds to the execution of the
sequence of rules 7 (or 7’), 8 and 9.
When there exists a dotted edge from a postCd(R)
to a preCd(S), and if postCd(R) ≺ preCd(S) and
preCd(S) ≺ postCd(R), we may merge the postcon-
dition of the rule R with the precondition of the rule S.
For example, postCd(3) ≺ preCd(4) and preCd(4) ≺
postCd(3). The only difference is that there are two
primitive conditions in 4 (two ports of type L should
be in their hidden state with 0 active connection, see
Fig. 9), that are not in 3. Thus, the transition CD
represents the execution of the rule 3, and the transi-
tion DE represents the execution of the rule 4. D is
the postcondition of the rule 3 and also the precondi-
tion of the rule 4. We may add the two extra primi-
tive conditions to the transition DE, the white node in
state 2 in the SOG D should be the last nodes of the
first strand and the white node in state c in the SOG D
should be the last node of the second strand. Because
the ports and the types are not specified in the GSTD,
the port and type conditions may be expressed as extra
conditions on the transitions. These extra conditions
are directly inherited from the graph rewriting rules.
There are three different types of basic conditions that
are used and combined to specify each transition con-
ditions:
Type Conditions: They check the type of a node.
For example in the transition IJ, the condition “gray
node 1 M” means that the gray node in state 1 should
be of type M (input Material separator);
Subtype Condition: They compare the subtypes
of two NSOs. For example in the transition IJ, the
condition “white node 1 = white node a” means that
the white node in state 1 should have the same subtype
as the white node in state a;
Position Conditions: They check the position of
a node in the context. For example, in the transition
AB the condition “black node 1 and black node a first
node”. There are only four positions to be specified.
The first node of the context strand (a node with a
+L:0 port), the first node of an input strand (a node
with a -L:0 port), the last node of the context strand
(a node with a -L:0 port) and the last node of a input
strand (a node with a +L:0 port).
5.3 Outline of the Correctness Proof of
our NSO Rules
The whole process is divided into four stages: dock-
ing, output strand formation, undocking and reinitial-
ization. Each stage consists of “propagation of SOGs”
over the global structure. Basically, for each transi-
tion, other SOGs reached through dotted arrows may
be also obtained as explained previously. This corre-
sponds to the “SOG propagation”.
Docking: This stage connects different input
strands to the context strand.
Initialization: By the transition AB, we get either
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
104

C or I.
Propagation: From C (, or I), it is only possible to
perform CD (, or IJ). Both of these transitions connect
a node of the context to a node of an input strand .
After the transition CD (, or IJ), if the white node in
state 2 is not the last node of the first strand, we will
obtain either C or I, and, hence, we will repeat the
same step. Else we can only obtain the transition DE
(, or JK), to obtain a E (, or K).
Input Strand Interconnection: When the last
node of the last input strand is connected to the last
node of the context, all the input strands are correctly
docked (because the direction of the docking is from
the left to the right, and the last node of the context is
its right most node).
Initialization: By the transition DE (, or JK), we
will get E (, or K).
Propagation: From E (, or K), it is only possible
to perform the transition EF (, or KL). Both of these
transitions change the state of the black node to the
state d (JK also connect the white node in e to the
black node in c). After the transition EF (, or KL),
if the black node in 2 is not the first node of the first
strand, we will obtain either E or F, and we can only
repeat the same step. Else we can only perform the
transition FG (, or LM), and we will obtain G (, or
M).
Undocking: This stage undocks the output strand
and the stimulus by breaking the connections between
the nodes in the first strand and the nodes in the sec-
ond strand from right to the left.
Initialization: By the transition FG (, or LM), we
will get G (, or M).
Propagation: From G, we can only perform the
transition GH (if the black node in 3 is not a sepa-
rator). From M, if the grey node in 2 is a stimulus
separator or an input separator, we can perform either
the transition MN or MO. Therefore we can perform
either the transition GH, MN or MO. If the white node
in 3 is not the last node of the first strand, we will ob-
tain either G or M, and will repeat the same step.
Reinitialization: When the undocking stage is
terminated, we have a pair of a context and a output
strand, or a triple of a context, an output strand and a
stimulus. They must be reinitialized to be able to par-
ticipate in another reaction. This is done by the rules
from 16 to 18 for the context and by the rules from 19
to 22 for the stimulus and the output strand.
6 CONCLUSIONS
This paper has proposed a framework based on the
RNA replication mechanism to design the third level
of our formal modeling. With this framework, it is
possible to implement any reactions of a catalytic re-
action network by using nucleotide smart objects in
a generic way. In order to prove the validity of such
an implementation, we have introduced a global state
transition diagram that resumes the graph rewriting
rules. The NSOs in the same strand need not to be in
the same place. They may exist at different locations
in a physical environment and be connected through
the Internet. This modeling opens a new vista for new
application scenarios of proximity-based federation
of smart objects. With this new approach based on the
RNA replication mechanism, and with the representa-
tion of the interactions among smart objects based on
catalytic reaction networks, we will become able to
consider, to describe, and to implement new innova-
tive scenarios beyond the current scope of stereotyped
applications of ubiquitous, pervasive, and/or mobile
computing.
REFERENCES
Gelernter, D. (1985). Generative communication in linda.
ACM Transactions on Programming Languages and
Systems, 7:80–112.
Henricksen, K., Indulska, J., and Rakotonirainy, A. (2002).
Modeling context information in pervasive computing
systems. in F. Mattern and M. Naghshineh (Eds.):
Pervasive 2002, LNCS, 2414:167–180.
Kauffman, S. A. (2000). Investigations. Oxford University
Press.
Milner, R. (2001). Bigraphical reactive systems: Basic the-
ory. In Proceedings of the International Congress of
Mathematicians, pages 155–169.
Milner, R. (2004). Theories for the global ubiquitous com-
puter. Foundations of Software Science and Computa-
tion Structures, LNCS, 2987:5–11.
Picco, G. P., Murphy, A. L., and Roman, G.-C. (1999).
LIME: Linda Meets Mobility. In Proc. of ICSE’99
Int’l Conference, pages 368–377.
Tanaka, Y. (2008). Proximity-based ad hoc federation
among smart objects and its applications. Proc. of
CSTST’08 int’l.
Tanaka, Y. (2010). Proximity-based federation of smart ob-
jects: Liberating ubiquitous computing from stereo-
typed application scenarios. Proc. of KES’10 Int’l
Conference, LNCS, 6276/2010:14–30.
FORMALIZATION OF AN RNA-INSPIRED MIDDLEWARE FOR COMPLEX SMART OBJECT FEDERATION
SCENARIOS
105
