
SEMANTIC SEGMENTATION USING GRABCUT
∗
Christoph G
¨
oring, Bj
¨
orn Fr
¨
ohlich and Joachim Denzler
Department of Mathematics and Computer Science, Friedrich Schiller University, Jena, Germany
Keywords:
Semantic Segmentation, GrabCut, Shape, Texture.
Abstract:
This work analyzes how to utilize the power of the popular
GrabCut
algorithm for the task of pixel-wise labeling
of images, which is also known as semantic segmentation and an important step for scene understanding in
various application domains. In contrast to the original
GrabCut
, the aim of the presented methods is to segment
objects in images in a completely automatic manner and label them as one of the previously learned object
categories. In this paper, we introduce and analyze two different approaches that extend GrabCut to make use
of training images.
C-GrabCut
generates multiple class-specific segmentations and classifies them by using
shape and color information.
L-GrabCut
uses as a first step an object localization algorithm, which returns a
classified bounding box as a hypothesis of an object in the image. Afterwards, this hypothesis is used as an
initialization for the GrabCut algorithm. In our experiments, we show that both methods lead to similar results
and demonstrate their benefits compared to semantic segmentation methods only based on local features.
1 INTRODUCTION
Finding objects in images is a challenging task in com-
puter vision. A much more complex challenge is to lo-
cate objects in a pixel-wise manner without any human
interaction. Previous works usually use local features,
which are classified. The results are often smoothed
by utilizing an unsupervised segmentation method. A
huge problem of these methods is that they operate on
highly over-segmented images. Objects composed of
different parts (e.g. black and white spots of a cow) are
not seen as one object, but they are seen independently.
It is difficult to incorporate shape information in such
methods and they lead to slivered segments.
A famous approach for a globally optimized seg-
mentation is the GrabCut algorithm introduced in
(Rother et al., 2004). In their work, a human has to
place a rectangle around an object which is segmented
afterwards using an iterative algorithm. This semi-
automatic segmentation method can handle objects
which are composed of different homogeneous areas.
In the present paper, we propose two methods
which integrate this powerful segmentation technique
into a semantic segmentation framework. The first
method starts with learning models for each class from
a training set. We use these models as an initializa-
tion for the GrabCut framework, so that we have one
segmentation per class. The segmentation with the
∗
Supported by the TMBWK ProExzellenz initiative.
minimum distance to the training data and the corre-
sponding class is the final result. Because different
segmentations computed by GrabCut are classified,
we call it Classification-GrabCut (
C-GrabCut
). In the
second approach an object localization algorithm de-
termines the object class and a bounding box which en-
closes the object. The GrabCut algorithm is initialized
with this bounding box to refine this rough segmenta-
tion. Because the object is localized before GrabCut is
applied, we call it Localized-GrabCut (
L-GrabCut
). A
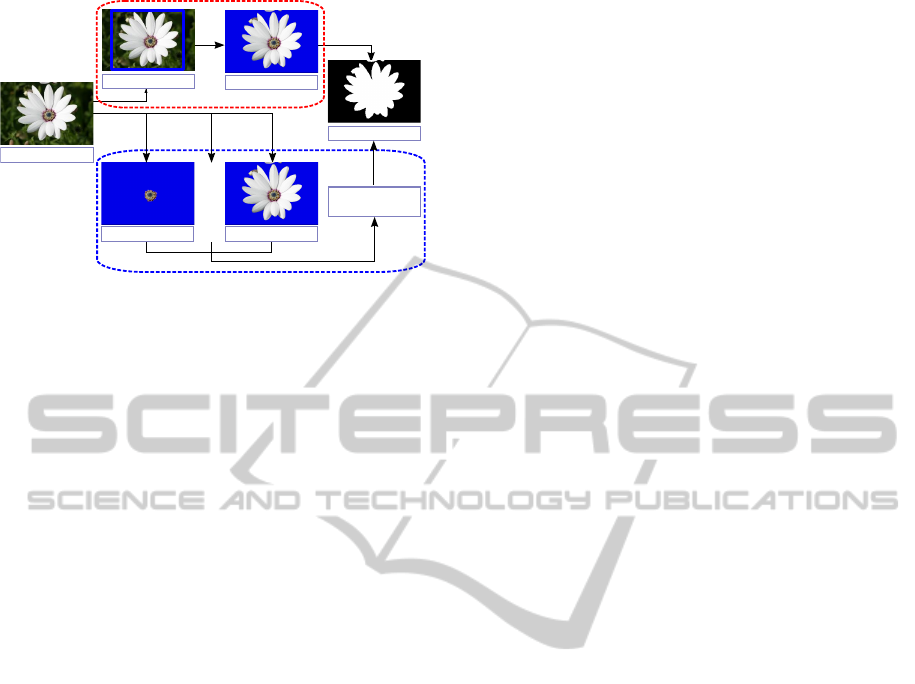
flowchart of both approaches can be seen in Figure 1.
(Jahangiri and Heesch, 2009) present an unsu-
pervised GrabCut algorithm that is initialized with a
coarse segmentation obtained by active contours. How-
ever, they are only able to segment the foreground ob-
jects from a plain background and do not use any class
specific information. ClassCut (Alexe et al., 2010) op-
erates on a set of images which all contain a foreground
object of the same class. The goal is to simultaneously
segment this set of images and learn a class model. The
model and the segmentations are computed iteratively
until convergence. ClassCut bears some resemblance
to
C-GrabCut
which is introduced here. In contrast the
algorithm presented in this paper, ClassCut assumes
the object class is already known.
The outline of this paper is organized as follows.
First we introduce our two methods in Section 2. Our
experiments in Section 3 show that both methods lead
to comparable and satisfying results. A summary of
597
Göring C., Fröhlich B. and Denzler J..
SEMANTIC SEGMENTATION USING GRABCUT.
DOI: 10.5220/0003829905970602
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 597-602
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
classifier
(shape, color)
image
GrabCut class 1
GrabCut class n
...
segm., class.
flower
GrabCut
local. + class.
C-GrabCut
L-GrabCut
flower
Figure 1: This flowchart shows both approaches.
C-GrabCut
: First an image is segmented using different
models to get an initial segmentation. In the second step a
classifier determines which possible segmentation is more
likely to be the correct one.
L-GrabCut
: The class of the
object and the bounding box is determined. Thereafter, Grab-
Cut is started using the bounding box as initialization. The
result of both methods is the class label and the segmentation
of the foreground object.
our findings and a discussion of future work conclude
this paper.
2 METHODS
We consider two ways to achieve a semantic segmen-
tation of a given image. First we do a segmentation of
the image and try to classify the foreground object or
second we try to locate a specific object in an image
and after this we segment it pixel-wise. For both meth-
ods, we need an already labeled training set, which is
used to train the parameters of our models. The anno-
tation can be a bounding box around the main object
or a pixel-wise labeling of the objects in the image.
For our first idea, we learn for each class a back-
ground and a foreground model which we use as an
initialization to segment a new input image. Therefore,
we have a segmentation of an image for each class. In
the following step, we want to find out which of these
segmentations is the most probable one by using shape
and color information for classification. We call this
idea
C-GrabCut
because we first utilize the GrabCut
method from (Rother et al., 2004), which we introduce
in Section 2.1 followed by the mentioned classification
step. A huge disadvantage of this method is obvious:
the complexity of
C-GrabCut
is linear in the number
of classes taken into account. For this reason, we found
another method, which we call
L-GrabCut
: In a first
step, we can use any object localization method which
gives us a bounding box of a potential object and a
corresponding class label. This bounding box is used
as an initialization for the semi-automatic GrabCut
segmentation.
In this section, we first give a brief introduction to
the GrabCut segmentation algorithm as a basic method
for both of our approaches. In the following sections,
we describe
C-GrabCut
and
L-GrabCut
as a way to uti-
lize GrabCut in a semantic segmentation framework.
2.1 GrabCut
GrabCut (Rother et al., 2004) is a state of the art un-
supervised semi-automatic segmentation. A user is
drawing a rectangle around the main object which is
used as an initial rough segmentation. In an iterative
algorithm the segmentation is improved step by step.
The framework introduced in the original paper only
considers color information, but texture information
is also very important for some classes. (Han et al.,
2009) introduced a method integrating texture informa-
tion into the GrabCut framework by utilizing nonlinear
multiscale structure tensors. Instead of the nonlinear
diffusion by a simple Gaussian smoothing we use a
multiscale structure tensor as also described in (Han
et al., 2009).
2.2 C-GrabCut: Classification of
Segmented Images
The first approach presented in this paper tries to re-
place the manual segmentation of the original GrabCut
by learning GMMs with class specific information.
In this section, we present our first idea of modifying
GrabCut for training and testing on different sets of im-
ages. Thereafter, we show how to classify the located
segments using shape and color similarity measures.
2.2.1 Segmenting with Prior Knowledge GMMs
Instead of using only one image as in the origi-
nal
GrabCut
, a training set for each class is used
to create a background and foreground model. Let
Z
Z
Z
c
= {z
z
z
1,c
,··· ,z
z
z
N
c
,c
}
be the set of training images of
class
c
and
A
A
A = {α
α
α
1,c
,··· ,α
α
α
N
c
,c
}
be the correspond-
ing ground-truth data. To train the GMMs for fore-
ground and background separately, the data is divided
into a set of foreground pixels
D
D
D
c,fgd
and a set of all
background pixels
D
D
D
c,bgd
according to the ground-truth
data:
D
D
D
c,κ
= {z
i,c
j
|α
i,c
j
= κ} , ∀κ ∈ {fgd, bgd} . (1)
For these two sets the corresponding GMMs are com-
puted. The result is
θ
θ
θ
, containing both the parameters
of the foreground and the background GMM of the
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
598

(a) Initial segmentation. (b) Result after GrabCut.
Figure 2: (a) initial segmentation using the learned GMMs
for class “flower”; (b) result after applying GrabCut.
training images. We determine the number of compo-
nents by optimization on the validation dataset.
Let
z
z
z = {z
1
,··· ,z
N
}
be an image that is to be seg-
mented. The initial segmentation
α
α
α
∗
= (α
∗
1
,··· ,α
∗
N
)
is computed using maximum likelihood estimation for
each pixel:
α
∗
i
= argmax
α
i
∈{fgd,bgd}
p(z
i
|α
i
,k
i
,θ
θ
θ),∀i ∈ {1, · · · , N}. (2)
This initial segmentation
α
α
α
∗
is used as an initializa-
tion to the GrabCut algorithm. An example of the
result of such an initial segmentation after applying
the GrabCut algorithm can be seen in Figure 2.
2.2.2 Classification
We explained in the previous section how to obtain a
segmentation without user interaction if the class of
the foreground object is known. Now, we address the
problem of determining the class of the object.
Let
C
C
C
be the set of foreground classes and
Z
Z
Z
c
the
set of training pictures of class
c
. By applying the
algorithm described in the previous section on a new
test image, we can obtain a segmentation
α
α
α
c
with
c ∈ C
C
C
for each of the classes. The results of the classification
of an example image is shown in 3.
We consider several different measures which are
evaluated in the experimental section of this paper.
Color Information.
The first type of distances is
based on similarity of color. First, we consider mea-
suring the distance to the foreground color GMM of
the whole class:
dist
m
(α
α
α
c
,Z
Z
Z
c
) = KL(GMM
α
α
α
c
,θ
θ
θ
c,fgd
) , (3)
where
GMM
α
α
α
c
is the GMM computed with the fore-
ground pixels of the test image and
θ
θ
θ
c,fgd
is the fore-
ground GMM of the model for class
c
. The func-
tion
KL
returns the symmetric Kullback-Leibler diver-
gence between two GMMs. For this, we use a match-
ing based approximation algorithm from (Goldberger
et al., 2003).
Second, we use the distance to the nearest neighbor
of the training dataset:
dist
f
(α
α
α
c
,Z
Z
Z
c
) = min
i=1,···,N
c
KL(GMM
α
α
α
c
,GMM
α
α
α
i,c
). (4)
Shape Information.
A different kind of distances
relates to the shape of the segmentation. As a simple
measure of shape the popular Hu set of seven invariant
image moments is used. The distance between two sets
of Hu moments
H
H
H
and
H
H
H
0
is computed in the following
way (Gonzalez and Woods, 2008, p. 841):
M(H
H
H,H
H
H
0
0
0
) =
∑
i=1,...,7
sign(H
i
)
log|H
i
|
−
sign(H
0
i
)
log|H
0
i
|
. (5)
To compute a distance between a segmentation
α
α
α
c
and
a class c, we use the following function:
dist
h
(α
α
α
c
,Z
Z
Z
c
) = min
i=1,···,N
c
M(h(α
α
α
c
),h(α
α
α
i,c
)) , (6)
where the function
h
computes a set of Hu moments
for a given segmentation α
α
α.
We also use the shape context algorithm described
in (Belongie et al., 2002) to compute a distance be-
tween a segmentation α
α
α
c
and a class c:
dist
b
(α
α
α
c
,Z
Z
Z
c
) = min
i=1,···,N
c
dist
sc
(α
α
α
c
,α
α
α
i,c
) , (7)
where
dist
sc
is a function that computes the distances
between two shapes using the shape context algorithm.
To integrate the different distances, we compute a
weighted sum of all distances:
dist(α
α
α
c
,Z
Z
Z
c
) =
∑
j∈{ f ,h,m,b}
w
j
dist
j
(α
α
α
c
,Z
Z
Z
c
) . (8)
The weights w
j
are computed on a validation dataset.
The final labeling
ˆc
and the corresponding segmen-
tation α
α
α
ˆc
is given by the lowest distance measure:
ˆc = argmin
c
dist(α
α
α
c
,Z
Z
Z
c
) (9)
The flowchart of the presented algorithm is illus-
trated in Figure 1.
2.3 L-GrabCut: Segmentation of
Classified Rectangles
One obvious drawback of
C-GrabCut
is the running
time which is linear in the number of classes. For this
reason, we will now present an approach that classifies
the object in an image before it is segmented using
GrabCut. We use an object localization algorithm that
returns a bounding box and a class to obtain the initial
segmentation. The bounding box segmentation is then
optimized using GrabCut. A flowchart of
L-GrabCut
can be seen in Figure 1.
SEMANTIC SEGMENTATION USING GRABCUT
599

(a) Model flower.
dist
f
=4.135
,
dist
h
=0.003 dist
b
=0.813
,
dist
m
=38.83.
(b) Model car.
dist
f
=46.88
dist
h
=0.192 dist
b
=0.457
,
dist
m
=37.48.
(c) Model airplane.
dist
f
=74.85
dist
h
=1.180 dist
b
=0.843
,
dist
m
=65.38.
(d) Model cow.
dist
f
=36.83
dist
h
=0.246 dist
b
=0.437
,
dist
m
=39.63.
Figure 3: The resulting segmentation using different models to get the initial segmentation. Furthermore, the distance of the
foreground color GMM
dist
f
, the distance of the hu moments
dist
h
, the shape context distance
dist
b
and the distance of the
class GMM dist
m
is shown.
In literature there are different approaches to object
detection. Some utilize local features, like (Marszalek
and Schmid, 2007) who try to combine local features
with shape masks. Another class of object detectors
uses a sliding window and evaluates each window
with a binary classifier. A popular object detector that
uses the sliding window approach is the histogram
of gradients (hog) detector (Dalal and Triggs, 2005)
which was successfully used for human detection.
For our experiments, we chose the algorithm from
(Felzenszwalb et al., 2010). It uses an extension of
the hog features. A set of parts is added which can
change their position to adapt to small changes in pose.
It delivers state of the art results on the challenging
Pascal dataset and was awarded a “lifetime achieve-
ment” prize from the organizers of the Pascal Visual
Object Class Challenge (Everingham et al., 2010).
Due to the reason that in some cases the bounding
box does not enclose the whole object, we considered
a modification of the GrabCut algorithm that also al-
lows foreground pixels outside of the initial bounding
box. But in our experiments we have shown that some
segmentations improved, but the overall recognition
rate stayed the same.
3 EXPERIMENTAL RESULTS
In this section, we concentrate on the evaluation
and precise analysis of our introduced methods,
C-GrabCut
and
L-GrabCut
. Finally, we give a dis-
cussion of our results.
For our evaluation, we are using our own dataset
composed of images obtained from various image
sources: MSRC (Winn et al., 2004), LabelMe (Rus-
sell et al., 2008) and image search engines
2
. The final
number of 90 images per category is divided into 30
2
Dataset available: www.inf-cv.uni-jena.de/ssg.
images for training, validation and testing each. Some
examples of the used dataset can be seen in Figure 6.
To compare results, we use the following metric:
r
c
= (r
ob
+ r
bg
)/2 (10)
where
r
ob
and
r
bg
are the ratios of correctly classified
object and background pixels. Furthermore, we use
the average recognition rate of all classes:
r
av
= (Σ
c∈C
C
C
r
c
)/
|
C
C
C
|
. (11)
3.1 C-GrabCut
In this section, we want to analyze the results of
C-GrabCut
introduced in Section 2.3. For each of
the four classes a model is learned over all training
images. These models are used as initialization of
GrabCut for each test image. The final segmentation
and label is selected out of these segmentations by a
classification step as introduced in Section 2.2.2.
To evaluate the classification step, we computed the
different distance measures using the ground truth seg-
mentation and computed the percentage of correctly
classified foreground objects. The best result using
only a single distance was achieved using
dist
f
with
84%.
dist
m
achieved 56%,
dist
b
24% and
dist
h
68%.
This experiment showed that a weighted combination
of
dist
f
and
dist
h
gives the best classification result
with 85%. Incorporating the other measures did not
improve the result. The weights are learned on the
validation dataset. A weighted combination of all pro-
posed distances does not improve the results.
A modified Version of
C-GrabCut
where the clas-
sification step is bypassed and the ground truth classi-
fication is used instead was evaluated. The recognition
rate was
r
av
= 0.84
using only color and
r
av
= 0.73
using only texture information. By combining texture
and color a recognition rate of
r
av
= 0.88
was reached.
In Figure 4, the results of both of our approaches
can be seen. The performance varies between classes.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
600

0.7
0.75
0.8
0.85
0.9
cow
car
flower
airplane
average
recognition rate r
c
C-GrabCut L-GrabCut
Figure 4: Recognition rates for all classes for
C-GrabCut
and L-GrabCut.
0.75
0.8
0.85
0.9
0.95
1
avg. recognition rate r
av
ideal bounding box
class known
C-GrabCut
L-GrabCut
Figure 5: Average recognition rates of both of our methods
in comparison to a modified version of
L-GrabCut
using an
ideal bounding box and a modified version of
C-GrabCut
that skips the classification step and uses the ground truth
classification instead.
The results are particularly good for the class cow.
On average the achieved recognition rate was
r
av
=
0.80
. The gap between
C-GrabCut
and the presented
idealized method is about 8 percentage points.
3.2 L-GrabCut
In Section 2.3, we introduced
L-GrabCut
as another
method for semantic segmentation of an image. First
we locate the object in a test image by utilizing the
localization method from (Felzenszwalb et al., 2010)
which returns a bounding box and a class name. In the
second step this bounding box is used as initialization
of the GrabCut algorithm.
The results for
L-GrabCut
are shown in Figure 4.
The performance is particularly good for the class car,
which has a recognition rate of
r
c
= 0.85
. On average
the achieved recognition rate was r
av
= 0.81.
In Figure 5, we also show results of a modified
version of
L-GrabCut
where we use the ground truth
bounding box as initialization. This means that with
a better localization method than (Felzenszwalb et al.,
2010) this algorithm could achieve results up to
10
percentage points better. We also showed that in the
ideal case the addition of texture information only
improved the result by 0.4%.
3.3 Discussion of Results
In this section, we have demonstrated that each com-
ponent of our methods lead to satisfying segmentation
and classification results. Furthermore, we have shown
that both of our introduced methods yield to results
close to their practical upper bounds. The outcomes
of both of our methods are comparable. However,
the findings of
L-GrabCut
, where we segment the pre-
vious classified bounding boxes, are slightly better
than
C-GrabCut
. The preconditions for
L-GrabCut
are better compared to
C-GrabCut
. This can be seen
in Figure 5, where the outcomes of the ideal bounding
box for
L-GrabCut
are better than the outcomes of
the perfect classification for
C-GrabCut
. Some seg-
mentation results for both methods are presented in
Figure 6.
Furthermore, we have shown that our methods do
not benefit from shape context proposed in (Belongie
et al., 2002), but Hu moments and nearest neighbor
distance of the Gaussian mixture models lead to an im-
proved performance. We could also show that texture
information is not as important as color information,
but for some classes it might be beneficial. The usage
of texture information improves the average results
slightly but the main disadvantage of texture features
is the increased running time.
4 CONCLUSIONS
In this paper, we described two methods to use the
semi supervised segmentation algorithm GrabCut in
an unsupervised manner semantic segmentation.
Both methods have their advantages and disadvan-
tages. The segmentations are less slivered than the
results of a previously introduced semantic segmen-
tation approach. But
L-GrabCut
depends very much
on the performance of the localization algorithm. If
the bounding box is to small, parts of objects outside
of the bounding box will be ignored. This is also a
problem if there are multiple instances of an object in
an image, where only one is located by the object lo-
cation method (cf. Figure 6 first line). For
C-GrabCut
the main disadvantage is that we need a segmentation
for each class. As a result, the complexity is strongly
controlled by the number of classes.
The presented methods only work for images with
a single foreground object. It could be useful to inte-
grate these methods into a larger semantic segmenta-
tion framework as a refining step to improve results on
image parts containing only one object.
It might also be very interesting to find ways to
extend our ideas to a multiclass solution. With these
SEMANTIC SEGMENTATION USING GRABCUT
601

Input.
Ground-truth.
C-GrabCut. L-GrabCut.
flower airplane cow car background
Figure 6: Example input images, ground-truth data and results of both introduced methods.
methods it is possible to evaluate the algorithms on
more common datasets like PASCAL VOC (Evering-
ham et al., 2010) or the MSRC21 dataset (Winn et al.,
2004). Possible approaches are
α
-expansion or multi-
way cuts (Boykov et al., 2001).
The way to incorporate shape information de-
scribed in this paper is not very flexible and only rates
the final segmentation. Hence, it might be interesting
to analyze ways to directly integrate a type of shape
energy into the graph cut algorithm similar to an EM
method to improve the segmentation result.
REFERENCES
Alexe, B., Deselaers, T., and Ferrari, V. (2010). Classcut
for unsupervised class segmentation. In ECCV, pages
380–393.
Belongie, S., Malik, J., and Puzicha, J. (2002). Shape match-
ing and object recognition using shape contexts. PAMI,
24(4):509–522.
Boykov, Y., Veksler, O., and Zabih, R. (2001). Fast ap-
proximate energy minimization via graph cuts. PAMI,
23:1222–1239.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In CVPR, volume 1,
pages 886–893.
Everingham, M., Van Gool, L., Williams, C. K. I., Winn,
J., and Zisserman, A. (2010). The PASCAL Visual
Object Classes Challenge 2010 (VOC2010) Results.
Felzenszwalb, P. F., Girshick, R. B., McAllester, D., and
Ramanan, D. (2010). Object detection with discrimina-
tively trained part-based models. PAMI, 32:1627–1645.
Goldberger, J., Gordon, S., and Gordon, S. (2003). An
efficient image similarity measure based on approxima-
tions of KL-divergence between two gaussian mixtures.
In ICCV, pages 487–493.
Gonzalez, R. C. and Woods, R. E. (2008). Digital image
processing. Prentice Hall, Upper Saddle River, N.J.
Han, S., Tao, W., Wang, D., Tai, X.-C., and Wu, X. (2009).
Image segmentation based on GrabCut framework in-
tegrating multiscale nonlinear structure tensor. IEEE
Trans. on Image Processing, 18(10):2289–2302.
Jahangiri, M. and Heesch, D. (2009). Modified grabcut
for unsupervised object segmentation. In ICIP, pages
2389–2392.
Marszalek, M. and Schmid, C. (2007). Accurate object
localization with shape masks. In CVPR.
Rother, C., Kolmogorov, V., and Blake, A. (2004). Grabcut:
Interactive foreground extraction using iterated graph
cuts. ACM Trans. on Graphics (TOG), 23(3):309–314.
Russell, B. C., Torralba, A., Murphy, K. P., and Freeman,
W. T. (2008). Labelme: A database and web-based tool
for image annotation. IJCV, 77:157–173.
Winn, J., Criminsi, A., and Minka, T. (2004). Microsoft
research cambridge object recognition image database.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
602
