
A MULTI-SENSOR SYSTEM FOR FALL DETECTION IN
AMBIENT ASSISTED LIVING CONTEXTS
Giovanni Diraco
1
, Alessandro Leone
1
, Pietro Siciliano
1
, Marco Grassi
2
and Piero Malcovati
2
1
Institute for Microelectronics and Microsystems, CNR, Via Monteroni, 73100, Lecce, Italy
2
Dept. of Electrical Engineering, University of Pavia, 1, Via Ferrata, 27100, Pavia, Italy
Keywords: Multi-sensor network, Ambient assisted living, Fall detection, Time-of-flight camera, Wearable
accelerometer.
Abstract: The aging population represents an emerging challenge for healthcare since elderly people frequently suffer
from chronic diseases requiring continuous medical care and monitoring. Sensor networks are possible
enabling technologies for ambient assisted living solutions helping elderly people to be independent and to
feel more secure. This paper presents a multi-sensor system for the detection of people falls in home
environment. Two kinds of sensors are used: a wearable wireless accelerometer with onboard fall detection
algorithms and a time-of-flight camera. A coordinator node receives data from the two sub-sensory systems
with their associated level of confidence and, on the basis of a data fusion logic, it operates the validation
and correlation among the two sub-systems delivered data in order to rise overall system performance with
respect to each single sensor sub-system. Achieved results show the effectiveness of the suggested multi-
sensor approach for improving fall detection service in ambient assisted living contexts.
1 INTRODUCTION
Among all Information and Communication
Technologies Sensor Networks (SNs) are very
promising as possible enablers of Ambient Assisted
Living (AAL) solutions towards more secure and
independent living. Traditional in-home monitoring
tasks can be drastically improved thanks to the
increasing availability of low-cost, low-power, small
embedded devices able to sense, process and
transmit data via wired/wireless communications.
The ubiquitous deployment of various kinds of
sensor nodes, such as cameras, accelerometers,
gyroscopes and so on, including placement of
sensors on the body, ensures the constant in-home
monitoring of person’s health. This paper presents a
multi-sensor system for people fall detection with
particular interest in protecting older people living
alone. Since one of the major causes of injury and
fear for older people is fall, SNs should be exploited
to automatically provide as fast as possible call for
assistance when needed, minimizing of course false
alarms to improve the performance of the system
and thus of the provided service. It has in fact been
demonstrated that the delivery of assistance after a
fall may reduce the risk of hospitalization by over
25% and of major injury or death by over 80%
(Shumway-Cook, 2009). On the other hand,
although the problem of in-home monitoring is
socially important, nonetheless the challenge is to
determine an acceptable trade-off between safety
and privacy intrusion. At this purpose, the suggested
system includes two different kinds of sensor nodes:
a privacy-preserving Time-Of-Flight (TOF) camera
and a wearable wireless accelerometer. The use of
two complementary sensors coordinated by a central
node (coordinator), provided with a data fusion
logic, allows to prevent false alarms or missed falls.
In case of emergency, the coordinator node
communicates with care holders and relatives of the
assisted person through a gateway node. At the same
time the privacy is guaranteed both within the house,
because the TOF camera processes only distance
information (appearance information is neither
processed nor recorded) providing only discrete
high-level features and outside the house since the
gateway may deliver to caregivers only falls alarms
together with their level of confidence.
2 SYSTEM OVERVIEW
The fall-detector system shown in Figure 1 includes
two different available commercial sensors: a TOF
213
Diraco G., Leone A., Siciliano P., Grassi M. and Malcovati P..
A MULTI-SENSOR SYSTEM FOR FALL DETECTION IN AMBIENT ASSISTED LIVING CONTEXTS.
DOI: 10.5220/0003834202130219
In Proceedings of the 1st International Conference on Sensor Networks (SENSORNETS-2012), pages 213-219
ISBN: 978-989-8565-01-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
camera and a MEMS three-axial accelerometer.
Each of the two sensors is connected to an
embedded PC acting as coordinator node which
communicates with an ADSL gateway to ask for
assistance in case of fall. The coordinator includes a
fuzzy rule-based data fusion logic that aggregates
information from the two sensor nodes in order to
produces a single data. The TOF camera is
connected to the coordinator node through USB 2.0
connection, while the wearable wireless
accelerometer communicates with the coordinator
node by means of a ZigBee radio link with a serial
connected transceiver. The employed TOF camera, a
MESA SwissRanger4000 (MESA Imaging AG,
2011), allows the description of the acquired scene
in terms of 3D distance measurements (depth maps).
The wearable wireless accelerometer sub-system is
made up of three main blocks: the 3-axial MEMS
ST-LIS3LV02DL sensor (STMicroelectronics,
2008) with I
2
C/SPI digital output, a low power
XILINX Spartan-6 FPGA with embedded fall
detection routines and a ZigBee radio module to
deliver potential fall alarms together with their level
of confidence to the coordinator.
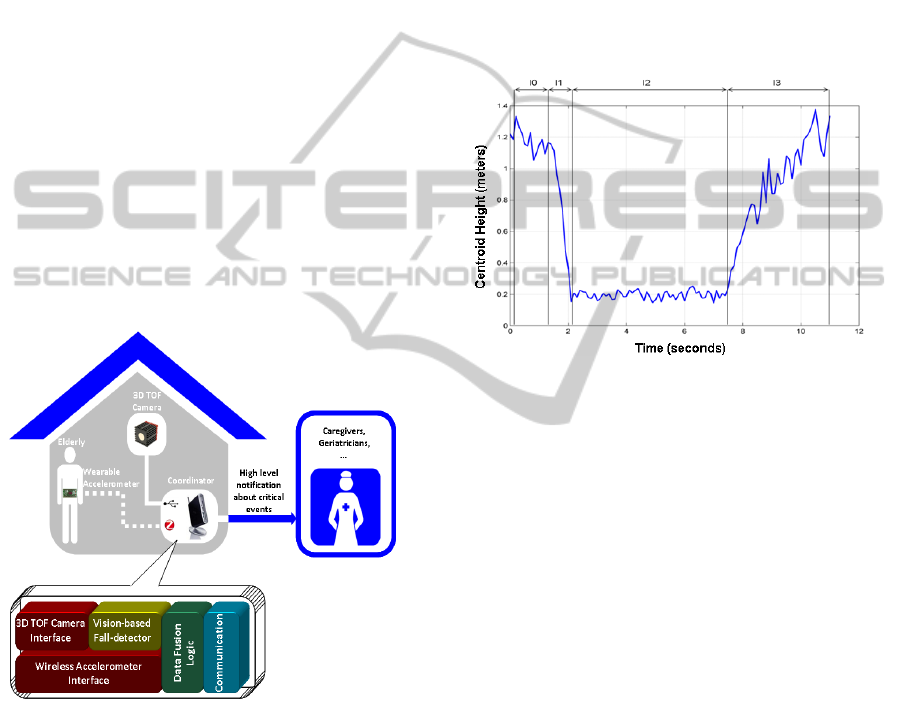
Figure 1: Overview of the multi-sensor system in which
the information coming from the wearable accelerometer
module and the TOF camera is combined by the
coordinator node in order to reliably detect falls.
3 ACTIVE VISION SUB-SYSTEM
The 3D data coming from the TOF camera are
processed by the vision algorithmic framework that
provides the following functionalities: people
counting, fall detection and body posture
recognition. The vision algorithmic framework
includes a first algorithmic level providing early
vision primitives such as background modeling,
people segmentation and tracking, and camera self-
calibration (further details can be found in Leone,
2009). Instead, the second algorithmic level is more
specifically dedicated to aspects related with feature
extraction and classification. The silhouette
dimensions and the gait trend are the features,
extracted and analyzed, for people detection and
counting functionalities. The detection of falls is
based on the analysis of the trend of the person’s
centroid (i.e. approximation of the center-of-mass)
height with respect the floor plane.
Figure 2: Typical trend of centroid height detected by the
3D vision sensor.
A typical trend of the centroid height during a
fall processed by the 3D vision sub-system is
reported in Figure 2 in which four phases can be
distinguished during a fall: the pre fall phase (I0),
the critical phase (I1), the post fall phase (I2) and the
recovery phase (I3). Falls are detected by using two
features: the person’s centroid height and the
duration of fall phases. In particular, a fall event is
characterized by: 1) a centroid distance lower than a
prefixed length threshold TH1 of about 40
centimeters; 2) a critical phase duration lower than a
threshold TH2 of about 900 milliseconds; and 3) an
unchangeable situation (negligible movements)
greater than a time threshold TH3 of about 4
seconds. Thresholds TH1, TH2 and TH3 are
experimentally defined according to Noury et al.
(2007).
The body posture recognition functionality is
able to discriminate four main postures, named
Standing (ST), Bent (BE), Sitting (SI) and Lying
down (LY). Postural features are extracted by
analyzing the shape of two volumetric point
distributions of which an example is reported in
Figure 3 for the SI posture.
SENSORNETS 2012 - International Conference on Sensor Networks
214

Figure 3: 3D point cloud of a posture (Sitting) and the
related upper and lower volumetric point distributions.
(a) (b)
(c) (d)
Figure 4: 3D point clouds related to the four main
postures: a) Standing, b) Bent, c) Sitting, d) Lying down.
The point clouds of all four postures are reported
in Figure 4. A good generalization ability during
classification is relevant since postures are not
perfectly repeatable: the acquisition viewpoint varies
in function of subject’s position and some level of
variation in data range is expected due to noise
effects. Therefore, a multi-class formulation of the
Support Vector Machine (SVM) classifier is adopted
in conjunction with rotation and scale invariant
features in order to classify the four main postures.
The binary nature of SVM is adapted to the multi-
class nature of the posture problem by using a one-
against-one strategy. Since good results are
documented in literature related to posture
recognition, a Radial Basis Function (RBF) kernel is
used and the associated parameters are tuned
according to a grid search procedure (for further
details on posture refer to Leone, 2011).
4 WEARABLE SUB-SYSTEM
Regarding the hardware details for the wearable
wireless accelerometer module, a simplified block
diagram is shown in Figure 5.
Figure 5: Block diagram of the developed wearable
wireless accelerometer hardware.
The core of this system is the FPGA that controls
the accelerometer,reads-out its digital output and
delivers the necessary information to the ZigBee
radio module, in order to have it transmitted to the
coordinator if necessary and there merged with 3D
vision data. Two operating modes are available for
the device: in the first one, which has been very
useful during test campaign and debug phase, the
FPGA sends all the raw data acquired from the
accelerometer to the ZigBee transmitter, and, of
course, eventual alarms. By contrast, during the
normal operative condition, the transmitted data are
limited to the possible alarms and to a signal useful
to determine if the system is working and “in range”
and, of course, if the accelerometer has been worn.
In both operating modes, at start-up, the control of
the MEMS accelerometer is comprehensive of an
initial setting of its internal registers, that allows the
choice of the most suitable characteristics for fall
detection purpose: among them, for example, the
device full-scale, the resolution and the read-out
rate. Once the setting phase is performed, the FPGA
keeps querying the accelerometer, switching among
the three axes. The accelerometer replies to every
request with one word, containing the instantaneous
acceleration experienced. This procedure is done
continuously at the selected rate, which has been set
by default at 10 Hz for overall acceleration query. In
normal operating mode the acceleration information,
when its value crosses a wake-up threshold defined
within a given algorithm, is saved into suitable
registers for 32 cycles, thus acquiring the amount of
information necessary to the ad-hoc algorithm in
order to properly reveal falls. Such algorithms are
loaded into non volatile FPGA embedded core
which, as underlined, has the computational task to
detect falls with their associated level of confidence.
The main advantage of having onboard algorithms
for fall detection is to reduce the power consumption
of the device, which may communicate with the
coordinator using ZigBee radio only in case of a fall-
A MULTI-SENSOR SYSTEM FOR FALL DETECTION IN AMBIENT ASSISTED LIVING CONTEXTS
215

like event, thus extending battery autonomy
(rechargeable Li-Ion 3.7V, 1100mAh) up to a couple
of weeks. The low power core runs in parallel six
different routines for fall detection, providing two
approaches for each axis. In order to save further
energy, the sensor device wakes up if a given
acceleration threshold is crossed on at least one axis.
The first approach measures the stress in terms of
fall energy, while the second checks the acceleration
shape and the estimated orientation/behaviour of the
person after the fall. In fact, the MEMS device is
also able to provide static information about
acceleration, thanks to its internal DC coupling and
thus the orientation of the assisted person may be
tracked. All relative acceleration components are
referred to the gravity and an additional digital low-
pass filter is used to give emphasis to reference DC
information. The main idea behind this algorithm is
that every time a fall event occurs, the acceleration
changes significantly and after the impact the person
lays down, often changing the static acceleration
orientation with respect to ground. Sometimes the
fall event happens fast, while other times the event is
slower. In order to measure the quantity of
acceleration stress or energy within an over-
threshold event, observing the acceleration data over
a window of about 0.5 seconds seems to be the best
compromise between effectiveness, complexity and
low power consumption for what concerns
calculation. Further details, including the importance
of the pre-fall assisted person behavior and the great
difficulty of emulating real falls in controlled
environment are provided by Grassi et al. (2010).
5 FUZZY-BASED DATA FUSION
The features extracted by the two sensor sub-
systems are merged in order to provide more
accurate information for the critical event rather than
each one of the individual source alone. The
detection of fall events by means of a multi-sensor
network deployed in an apartment having various
rooms is a complex system to be modeled;
consequently a fuzzy rule-based approach is a
suitable choice. The crisp variables provided by the
3D vision sub-system are the following: 1) a
Boolean variable indicates if there is any person
inside a room or not; 2) a real valued confidence
index in the range of (0,1) indicates the probability
that the person is fallen down on the floor; 3) four
real valued confidence indexes ranging in (0,1)
associated to each body posture. The first variable
allows to handle the situation in which the person is
out of the Field-Of-View (FOV) of the TOF camera
and thus the only viable information comes from the
accelerometer sub-system, if worn (e.g. if the person
is inside the bathroom and the nearest 3D vision
system is in the bedroom). Furthermore, it is
important to note that the choice to associate a
confidence index to each posture (the third variable)
allows to model overlapped situations in which for
example a person is seated and bent at the same
time. The wearable wireless accelerometer sub-
system provides two crisp variables that are: 1) a
Boolean variable indicating if the accelerometer is
working (i.e. it is “in range” and worn) or not, and 2)
a real valued confidence index ranging in (0,1)
indicating the probability that the person is fallen
down as detected by the worn accelerometer. We
remind that the employed ZigBee modules are able
to cover a standard apartment of about 100m
2
by
linking to at least a couple of receivers and thus
coordinators associated to the 3D vision systems of
the main rooms. Triangle and trapezoid functions are
the kind of membership functions used to transform
the crisp values provided by each sensor sub-system
into fuzzy linguistic variables. The knowledge on
which basis falls should be detected gives fuzzy
rules like: “if there is no one inside the TOF camera
FOV then consider only data provided by the
wearable accelerometer” and “if there are two or
more people inside a room then don’t send alarms”
and so on. The fuzzy rules are processed by using
the well-known Mamdani fuzzy inference technique,
producing fuzzy outputs which must be decoded or
“defuzzified” in order to get an aggregated system
output. The “defuzzification” process is done by
using the well-known centroid technique.
6 EXPERIMENTAL RESULTS
In this section experimental results coming from
each of the two different sensor sub-systems are
reported. The performance of the two subsystems
has been evaluated by collecting a large amount of
simulated actions. It has been crucial to use several
people to collect the data, in order to define an
algorithm as general as possible. Moreover, in the
performed recording sessions, the kind of fall has
been varied several times for each person (falling
forward, backward and sideward). A total amount of
450 actions including 210 falls in all directions
(backward, forward and lateral, with/without
recovery post fall) were simulated involving 13
healthy male equipped with knee/elbow pad
protections and crash mats. The simulated falls are
SENSORNETS 2012 - International Conference on Sensor Networks
216
compliant with those categorized by Noury et al.
(2009) and they can be grouped into the following
categories: backward fall ending lying (FBRS),
backward fall ending lying and lateral (FBRL),
backward fall with recovery (FBWR), forward fall
with forward arm protection (FFRA), forward fall
ending lying flat (FFRS), forward fall with recovery
(FFWR), lateral fall (FL). Several Activities of Daily
Living (ADLs) were simulated other than falls, in
order to evaluate the ability to discriminate falls
from ADLs. The simulated ADL tasks belong to the
following categories: sit down on a chair and stand
up (SITC), sit down on the floor and stand up
(SITF), lie down on a bed and stand up (LYB), lie
down on floor and stand up (LYF), bend down and
pick up something (BND).
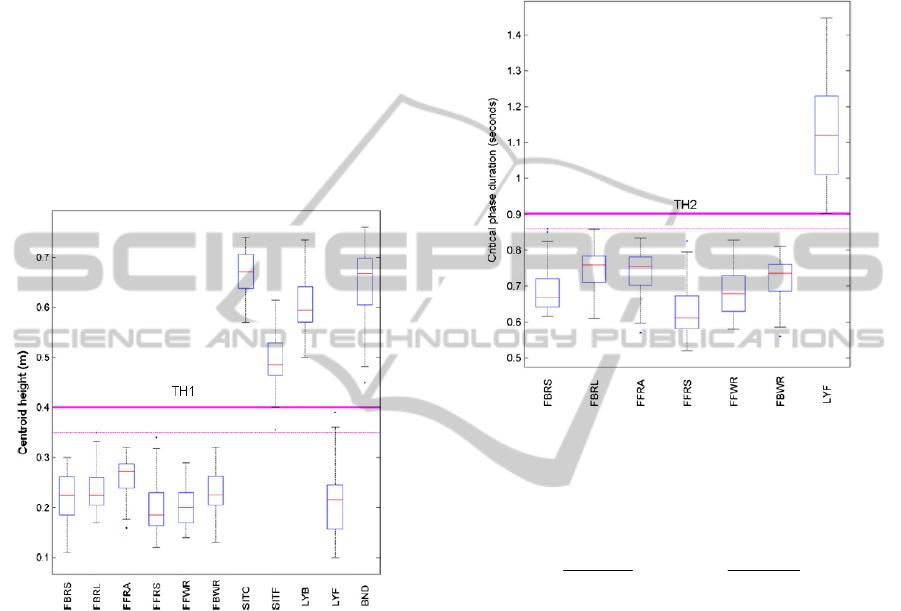
Figure 6: Statistical visualization of the minimum centroid
height during the performed falls and ADLs.
6.1 Results from Vision Sub-system
As previously discussed, the vision-based fall
detector is based on the tuning of three thresholds:
TH1, TH2 and TH3. The first threshold TH1 alone is
able to detect correctly all simulated falls, although
it is not able to distinguish between a fall and a
FFWR or between a fall and LYB/LYF. A statistical
visualization of results related to the threshold TH1
is shown in Figure 6. The threshold TH1 alone
identifies correctly 63.5% of ADLs as non-falls. By
adding the second threshold TH2 the percentage of
correctly detected ADLs rises to 79.4%, since the
threshold TH2 allows to discriminate correctly a
“voluntary lying down on floor” from an involuntary
fall characterized by a shorter duration of the critical
phase. The statistical visualization of TH2
discrimination capability is shown in Figure 7. By
using all thresholds (TH1, TH2, TH3)
simultaneously a reliability of 97.3% and an
efficiency of 80.0% are achieved, since the threshold
TH3 allows to detect correctly falls with recovery as
non-falls by considering the duration of the post fall
phase shorter than 4 seconds in case of recovery.
Figure 7: Statistical visualization of the critical phase
duration during the performed falls and ADLs.
In the following Eq. 1 the employed definitions for
efficiency and reliability scores are reported.
Efficiency=
FPTP
TP
, Reliability=
FNTP
TP
.
(1)
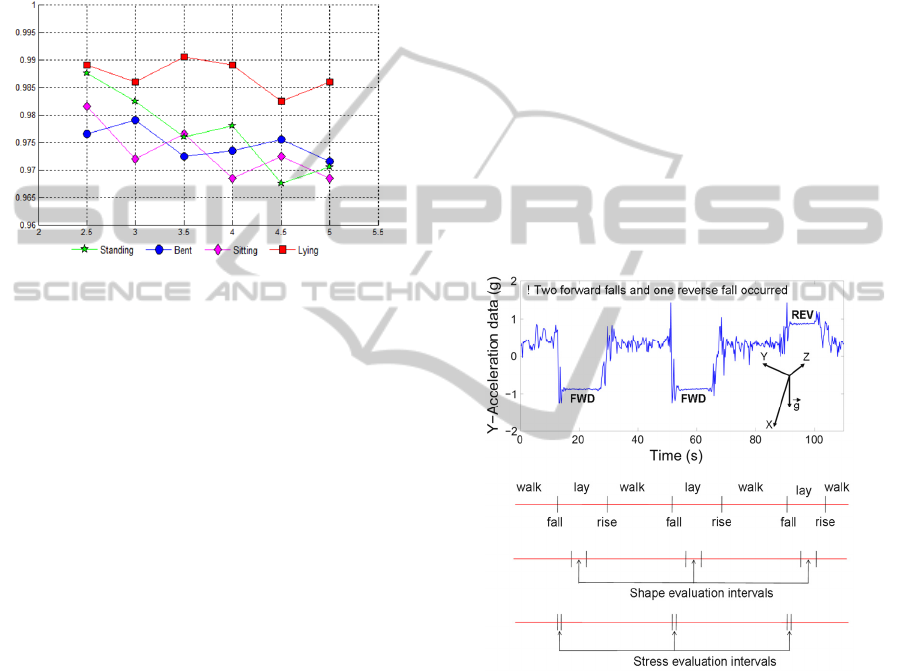
The best classification rates for body posture
recognition are found with the optimal parameters
(K;γ)=(1;32), where K is the regularization constant
and γ is the kernel argument. Postures were taken at
various distances from the camera, ranging from 2.5
meters to 5 meters. Classification rates at the varying
of the camera distance are reported in Figure 8.
The active vision-based fall detector shows good
performance also compared with other related
studies. For example, a similar study was conducted
by Brulin and Courtial (2010). In their work the
authors investigated a multi-sensors system for fall
detection in which traditional cameras (passive
vision) were used for postures recognition whereas
PIR detectors and thermopiles were used for
presence detection and people location respectively.
The authors achieved noticeable results in optimal
ambient conditions, however in real-world working
condition lighting variations, shadows and
perspective distortions (typical issue of monocular
passive vision) demoted features resulting in
A MULTI-SENSOR SYSTEM FOR FALL DETECTION IN AMBIENT ASSISTED LIVING CONTEXTS
217
performance decrease. Whereas the perspective
distortion can be faced by using a multiple passive
camera setting as done by Cucchiara et al. (2007),
the use of multiple cameras brings a number of new
problems such as, just to cite a few, the stereo
correspondence problem, the occlusion handling and
the calibration of multiple cameras (Hu, 2006). In
addition other problems such as shadows and
lighting variations remain virtually unmodified.
Figure 8: Classification rates at varying of camera distance
from 2.5 to 5 meters.
On the other hand, the suggested solution, since
it is based on active vision, presents several
advantages. A TOF camera with fewer pixels than a
multiple camera system can deliver more 3D
information, when the multiple camera system has
too many false matches due to the stereo
correspondence problem. Incomplete range data are
not produced by TOF camera because illumination
and observation directions are collinear preventing
the formation of shadows. The depth resolution does
not depend on the optical arrangement (as in the case
of multiple cameras) and hence extrinsic calibration
is limited to the only estimation of the camera pose,
whereas intrinsic calibration is not required at all.
TOF cameras are fully independent of external light
conditions, since they are equipped with an active
light source. Finally, it is important to note that the
TOF camera guarantees the person’s privacy, since
appearance (chromatic) information is not acquired
and low-resolution depth measurements are not
sufficient to reveal the person’s identity or to
compromise the feelings of intimacy.
6.2 Results from Wearable Sub-system
The measurements have been done setting the
MEMS device to the full-scale range of ± 2g,
leading to an absolute sensitivity in terms of
acceleration exhibited by the wireless module of
100µg, considering 12-bit resolution. The average
current consumption at 3.2-3.8V supply is of the
order of 200µA when waiting for an acceleration
event, about 1mA while processing the event
(considering 10samples/s per axis) and 30mA when
transmitting a fall-flag or in streaming mode. Since
the algorithm has been developed based on the
training events acquired, the data collection
campaign really played a fundamental role. By
exploiting the above mentioned ADLs different
thresholds have been evaluated using data from
several sessions for training. After that, the
performance of the algorithm has been evaluated on
the non-training oriented collected data and the
results are shown in Table 1 for different suitable
thresholds for acceleration shape approach (THL,
THM, THH). An example of a plot of the
acceleration along one axis (Y) has been reported in
Figure 9. It is possible to verify that every fall
origins a spike in the acceleration that is followed by
some oscillations and then the value remains stable
at a sensibly different value from the starting one.
Figure 9: Acceleration data stream session measured along
Y-axis with wireless device worn on the belt. The Y-axis
is orthogonal to the belt.
Figure 9 also indicates the action that the actor
was performing when the acceleration data was
recorded and we enlightened the portion of time
during which the data are evaluated by the
algorithm. The FPGA runs the algorithms and sends
the results to the ZigBee transmitter implementing a
3.3V-UART protocol. The timestamps related to
data and axis alarm flags are added by the
coordinator, which is also in charge of data fusion.
Considering that efficiency and reliability scores are
of course a trade-off and taking into account also the
combined performance of the two sensory sub-
SENSORNETS 2012 - International Conference on Sensor Networks
218
systems after data fusion operation, the intermediate
value for threshold has been exploited.
Table 1: Wearable accelerometer performance.
Shape Threshold Efficiency Reliability
Low (THL) 98.0 % 61.5 %
Medium (THM) 88.4 % 79.3 %
High (THH) 55.1 % 97.2 %
6.3 Data Fusion Results
The data fusion process improves the detection
performance thanks to the addition of both
analogous and complementary information. A
sample output of fall probability is shown in Table 2
in correspondence of two different kinds of falls and
one normal activity. From the rows of the table, it
can be seen as the merged fall probability (the
ALARM column) improves the fall probability of
each sub-system alone. In order to easy the
performance comparison, the scores related to each
standalone sub-system and the ones related to the
data fusion are reported jointly in Table 3. The
performance of the comprehensive framework
underlines a significant raise in both efficiency and
reliability.
Table 2: Sample output of fall probability.
Activity
Vision S. Wearable S.
ALARM
Fall Posture Fall
FL 0,87 Lying 0,82 0,95
FBWR 0,64 Sitting 0,73 0,44
SITF 0,40 Sitting 0,62 0,36
Table 3: System Performance.
Sub-system Efficiency Reliability
TOF camera 80.0 % 97.3 %
Accelerometer 88.4 % 79.3 %
Data fusion 94.3 % 98.2 %
7 CONCLUSIONS
A multi-sensor framework for indoor people fall
detection has been developed and experimental
results with real actors following state-of-the art
guidelines (Noury, 2009) have been performed first
for each single sensor sub-system and then for the
overall system. A fuzzy-based data fusion logic has
been proposed able to effectively handle the
uncertainty present in AAL contexts. The presented
system improves the performance of people fall
detection by processing multiple sensors data,
showing that SNs are a very promising approach for
critical event detection with low false alarm rate. In
addition, fuzzy rules can be easily modified and
adjusted in order to meet specific environment
constraints. Furthermore, the deployment of the
presented multi-sensor fall detection system in
apartments dwelled by elderly people is planed in
order to validate the system in real conditions.
ACKNOWLEDGEMENTS
The presented work has been carried out within the
Netcarity consortium funded by the EC, FP6.
REFERENCES
Brulin, D., Courtial, E., 2010, “Multi-sensors data fusion
system for fall detection,” In: Proceedings of 10th
IEEE ITAB, pp. 1-4.
Cucchiara, R., Prati, A., Vezzani, R., 2007, “A multi-
camera vision system for fall detection and alarm
generation,” Expert Syst J; vol 24, no. 5, pp. 334-45.
Grassi, M., Lombardi, A., Rescio, G., Ferri, M.,
Malcovati, P., Leone, A., Diraco, G., Siciliano, P.,
Malfatti, M., Gonzo, L., 2010, “An Integrated System
for People Fall-Detection with Data Fusion
Capabilities Based on 3D ToF Camera and Wireless
Accelerometer,” In: Proceedings of IEEE Sensors, pp.
1016-1019.
Hu, W., Hu, M., Zhou, X., Tan, T., Lou, J., Maybank, S.,
2006, “Principal axis-based correspondence between
multiple cameras for people tracking,” Pattern
Analysis and Machine Intelligence, IEEE Transactions
on; vol. 28, no. 4, pp. 663-671.
Leone, A., Diraco, G., Siciliano, P., 2009, “Detecting falls
with 3D range camera in ambient assisted living
applications: A preliminary study,” Medical
Engineering & Physics; vol. 33, no. 6, pp. 770-781.
Leone, A., Diraco, G., Siciliano, P., 2011, “Topological
and volumetric posture recognition with active vision
sensor in AAL contexts,” In: IEEE IWASI, pp. 110-
114
MESA Imaging AG, 2011, “SR4000 Data Sheet Rev.5.1,”
Zurich, Switzerland, 26 August 2011,
<http://www.mesa-imaging.ch>.
Netcarity UE Integrated Project, www.netcarity.org.
Noury, N., Fleury, A., Rumeau, P., Bourke, A. K.,
Laighin, G. O., Rialle, V., Lundy, J. E., 2009, “Fall
detection - Principles and Methods”, In: Proceedings
of 29th IEEE EMBS, pp. 1663-1666.
Shumway-Cook, A, Ciol, M. A., Hoffman, J., Dudgeon,
B., Yorkston, K., Chan, L., 2009, “Falls in the
Medicare population: incidence, associated factors,
and impact on health care,” Physical Therapy
Association; vol. 89, no. 4, pp. 324-32.
STMicroelectronics, 2008, “LIS3LV02DL Data Sheet
Rev.2,” January 2008, <http://www.st.com>.
A MULTI-SENSOR SYSTEM FOR FALL DETECTION IN AMBIENT ASSISTED LIVING CONTEXTS
219
