
UNCERTAINTY IN TRILATERATION
Is RSSI-based Range Estimation Accurate Enough for Animal Tracking?
Ragnar Stølsmark and Erlend Tøssebro
Institute of Electrical Engineering and Computes Science, University of Stavanger, Stavanger, Norway
Keywords: RSSI, Trilateration, Localization, Uncertainty.
Abstract: Animal tracking is important to farmers. It is mainly performed using GPS receivers. Equipping only some
of the animals with GPS receivers and have the others use them as beacons for RSSI-based trilateration
could be beneficial. This article tests whether such a solution is possible from an uncertainty point of view.
First a range of RSSI measurements were performed. These measurements were used to create a formula for
RSSI as a function of distance. The RSSI standard deviation measured in the tests gave an indication of the
error, or uncertainty, related to using RSSI to calculate distance. The distance function and standard
deviation were then used as a basis for simulations that calculated the uncertainty of RSSI-based range
estimation. The simulations showed that the localization error related to distance estimation by RSSI was
too high for it to be an efficient solution, even with a device twice as accurate as the test device.
1 INTRODUCTION
Animal tracking is a concept which has been of
scientific and commercial interest for a long time.
Different studies have for instance tried to figure out
where birds stay during the winter and how far a
pack of wolves roam. New technologies, such as
GPS and satellites, have revolutionized animal
tracking.
Livestock tracking is of great interest to
agriculture. By using new technology it is possible
for a farmer to keep track of his livestock without
leaving the office. Livestock tracking has proven to
be especially effective in sheep farming. Sheep
farmers traditionally send their animals to graze in
the mountains during the summer. In autumn they
then need to recover their sheep. This is a tedious
and time consuming process. It is not easy to search
for the sheep in large mountainous areas without
roads. The fact that the sheep tend to walk in small
flocks rather than one large group does not help
either. Thanks to commercial solutions such as
Telespor, built on the Electronic Shepherd research
project (Thorstensen et al., 2004) , sheep farmers can
now remotely track their sheep.
These systems typically rely on GPS for
localization. There are a couple of weaknesses with
this approach. First GPS consumes a lot of energy.
This means that one either have to reduce update
frequency or equip the nodes with big batteries that
can last an entire season. Secondly, GPS satellites
produce a weak signal. Therefore it can be hard to
locate sheep in dense forests and other areas with a
relatively low GPS signal strength.
An alternative way to locate sheep or other
animals could alleviate these problems. Since there
are several sheep in a flock, it could be possible to
use RSSI (Received Signal Strength Indicator) to
measure the range between sheep. Some of the sheep
would find their position using GPS. The others
could find their own position by trilateration using
the range measurements from the GPS sheep.
The main topic of this paper is whether such a
method gives an acceptable uncertainty, or
localization error, or if RSSI simply is unsuitable as
a range measurement tool in this context. Acceptable
uncertainty means it should be possible to retrieve
the sheep in a reasonable amount of time.
The paper is organized as follows: Chapter 2
presents related work. Chapter 3 gives an overview
of trilateration and uncertainty. Chapter 4 contains
the results of both our RSSI and range
measurements as well as our simulation results.
Chapter 5 concludes the paper.
2 RELATED WORK
RSSI and localization in wireless sensor networks
have been the topic of many research projects, such
237
Stølsmark R. and Tøssebro E..
UNCERTAINTY IN TRILATERATION - Is RSSI-based Range Estimation Accurate Enough for Animal Tracking?.
DOI: 10.5220/0003834402370241
In Proceedings of the 1st International Conference on Sensor Networks (SENSORNETS-2012), pages 237-241
ISBN: 978-989-8565-01-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

as: (Awad et al., 2007); (Sichitiu et al., 2003);
(Barsocchi et al., 2009); (Paul and Wan, 2009) and
(Hyo-Sung and Wonpil, 2009). Many of these
algorithms focus on indoor localization (Awad et al.,
2007); (Barsocchi et al., 2009); (Paul and Wan,
2009) and (Hyo-Sung and Wonpil, 2009), even if
RSSI is not particularly suitable for indoor range
estimation due to walls and other obstacles that
affects the signal propagation (Akyildiz et al., 2002).
In a room it can be effective however, and also a
good alternative since GPS is not available. In
(Awad et al., 2007) they used a neural network to
estimate the distances based on RSSI. This worked
well, however the distances in their experiment were
below 5 m, making it inapplicable to animal
tracking. They used an exponential function to
predict distance from RSSI. Using regression, they
found it to be a suitable function.
In (Sichitiu et al., 2003) the researchers
performed RSSI measurements using IEEE 802.11b
network cards. These measurements show a good
correlation between RSSI and distance. The
measurements were performed at relatively short
distances, the longest being 40 meters. This makes
the topology and terrain less of a factor. They also
simulated the accuracy of their RSSI-based
localization algorithm. They were able to get a low
uncertainty. The main problem with applying their
simulation to long range applications is that their ±
25 m RSSI accuracy is too optimistic. The
experiments in this paper show that ±100 m is closer
to the truth.
Researchers have also tried using RSSI to locate
cattle in grazing fields. In (Huircán et al., 2010) they
were able to locate animals by having a high beacon
density, with only 80 m between beacons. This
makes their solution expensive for animals that
reside in a large area. To cover an area of 5000 x
5000 m, which is not unusual for sheep grazing in
the mountains, would require approximately 3900
beacons.
3 TRILATERATION AND
UNCERTAINTY
Trilateration is a well-known method for
localization. A good introduction to the topic can be
found in (Yang and Liu, 2010). To be able to
unambiguously locate an object in two dimensions
using trilateration, the following information is
necessary:
1. The position of at least three other objects.
2. The distances between the object being located
and each of the other objects.
Figure 1: Trilateration with two beacons. The object could
be located in both shaded areas.
If these are known, one can solve a set of
equations to find out the position of the last object.
Although the position of three other objects is
enough to locate an object, the accuracy improves
with every extra distance and location combination
that is known.
Applying RSSI-based trilateration to livestock
tracking is not trivial. There are especially two
problems that arise from relying on trilateration
based on other animals’ positions. The first problem
is that one needs the position of at least three other
animals. This means that at least four animals must
be fairly close to each other and three of them must
find their positions via different means. To achieve
this, the flock must be dense compared to the
maximum range of the transceivers used to send
messages between the animals. Some of the sheep
must also have a different localization method.
Localization is possible with fewer than three other
known positions, but it will lead to reduced accuracy
due to separate uncertainty areas, as illustrated in
figure 1.
The second problem is the uncertainty of the
final position estimate. The uncertainty comes from
two sources, the position of the other objects and the
distance to those objects. If the other objects were
localized via GPS their position should be fairly
certain. GPS receivers typically have an accuracy of
10 meters under normal conditions. The distance
uncertainty depends on the accuracy of the distance
measurement tool.
RSSI is generally reduced with increasing
distance and easy to obtain if both animals carry
transceivers. Therefore it is a good candidate as a
distance measurement tool. Distance is however not
the only thing affecting RSSI. Terrain, obstacles,
vegetation, antenna orientation and weather also
plays a role. With that in mind the objective of this
paper is to determine if RSSI is a suitable tool for
livestock tracking. That means to test if it can
provide acceptable uncertainty in a realistic terrain.
SENSORNETS 2012 - International Conference on Sensor Networks
238
4 TEST SETUP AND RESULTS
To test whether RSSI can be used as a range
estimator for tracking of sheep and other animals,
several RSSI measurements were performed. The
results from these measurements were then used in a
set of simulations designed to test the accuracy of
RSSI-based trilateration.
4.1 RSSI Measurements
The RSSI measurements were performed outdoors
in varying environments similar to those where
sheep typically graze. Hills, forests and flat open
ground, were all present in the areas where the
measurements were carried out. The radio
equipment used in the tests was Waspmotes,
wireless sensor network motes from Libelium. They
are equipped with an 868 MHz XBee transceiver
connected to an antenna capable of transmitting a
315 mW signal. During the tests they were never
able to transmit a signal over more than 2 km. The
average achieved range during testing was 505 m
with a standard deviation of 170 m. The RSSI
measurements were carried out separately from the
range tests.
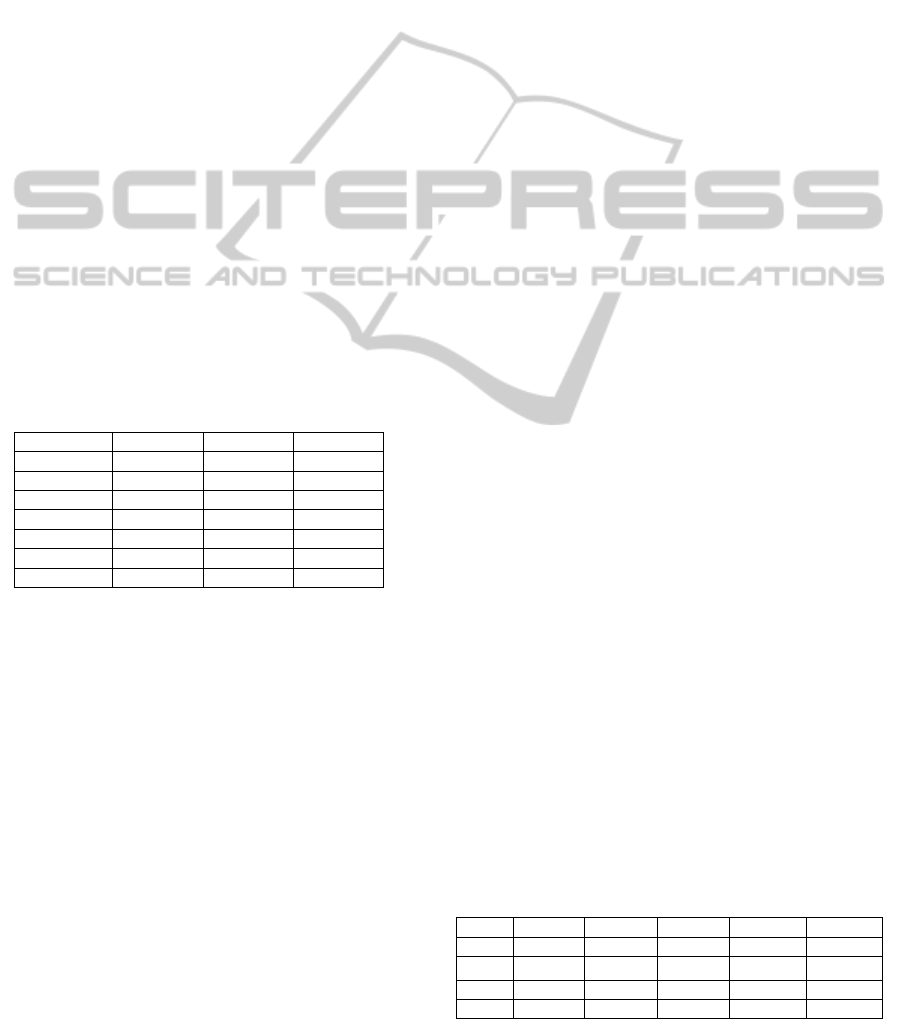
Table 1: RSSI measurements.
Distance Avg. RSSI Std. Dev. # tests
50
71.4 6.8 25
100
89.7 11.0 25
200
100.3 8.5 25
300
104.8 9.1 20
400
97.6 1.8 5
500
115.0 1.4 5
600
124.0 1.4 2
The RSSI tests were performed in the following
manner: A beacon node was first setup. This beacon
node would reply to any request received from the
mobile node carried by the person performing the
test. The tester could then read the RSSI at the
mobile node. For each test location, 5 RSSI readings
would be done at a distance of approximately 50 m.
The tester would then perform 5 readings at 100 m,
200 m, 300 m and so forth, until no signal was
received. Table 1 summarizes the results of these
measurements. The RSSI in the Waspmote range
from 61 db, when the antennas are placed next to
each other, to 130 db, when there is almost no
signal. As predicted, table 1 shows significant
variations in the RSSI at equal distances due to
geographical differences. The small variation at the
three longest distances is due to the fact that there
was only one of the five beacon placements that
were able to transmit a signal that far.
4.2 Simulation Setup
The simulations ran in a Java simulator written
specifically for these tests. The simulator would first
uniformly distribute the sheep flock over an area of
5 x 5 km. This size was chosen because it represents
a typical grazing area for a flock of sheep. The
simulator equipped all the sheep with transceivers
that had the same range (505 m) and standard
deviation (170 m) measured during the range tests.
Some of the sheep would also be equipped with GPS
receivers. These receivers have an accuracy radius
of 10 m in the simulations. All of the animals knew
which sheep were within their radio range, and the
exact position of those sheep. The sheep without
GPS receivers calculated the uncertainty of their
own position estimate based on the position of sheep
with GPS within radio range. This uncertainty was
calculated in the following manner: For each
neighbor with GPS, the known distance to that
neighbor would be used to calculate a minimum and
maximum RSSI value. The function used for
converting distance to minimum (-) and maximum
(+) RSSI was:
(
)
= 9.431 + 17.2 ∗
(
)
±2σ
(1)
where σ = 6.7823 when dist < 100 m
and σ = 9.5448 otherwise.
This function was based on the results from the
RSSI measurements. With increasing distance there
was more variation, therefore a higher standard
deviation was used for distances over 100 m. These
two values would then be translated to a minimum
and maximum distance representing the uncertainty
of the distance estimate using an inverse function:
(
)
= 5.211 ∗
(.∗)
(2)
The uncertainty area corresponding to each GPS
neighbor is therefore doughnut shaped. The total
uncertainty area is decreased with every additional
GPS neighbor. Every simulation scenario was
repeated 100 times and the results are an average of
the values in those runs.
Table 2: Average uncertainty area among non-GPS nodes
[m
2
].
GPS % 50 sheep 100 sheep 150 sheep 200 sheep 250 sheep
20
1889539 1714458 1555184 1376825 1260480
40
1726486 1390939 1119644 879674 701482
60
1530232 1104071 773226 563953 421873
80
1382559 904196 584406 409051 285684
UNCERTAINTY IN TRILATERATION - Is RSSI-based Range Estimation Accurate Enough for Animal Tracking?
239

4.3 Simulation Results
Two metrics have been chosen as the main success
criteria, average uncertainty area and average
extremity distance. The uncertainty area is defined
as the area a node can be in given it knows the
location and an approximate distance to a set of
other nodes. A smaller uncertainty area means less
area has to be searched and the animals can therefore
be retrieved faster. The second criterion is the
extremity distance. It is defined as the length of the
longest straight line possible to draw within a
bounding box surrounding the uncertainty area. This
metric is important since one of the main purposes
of animal tracking is to be able to find the animal
quickly when searching for it in the real world. The
problem with just looking at the uncertainty area is
that the area can be quite small and still have a large
extremity distance. An example of such an area
would be a very thin rectangular shape. This would
result in a lot of time spent walking from one end of
the area to the other. The simulations have been
performed with different flock sizes and different
GPS/non-GPS ratios (20-80% GPS). The average
uncertainty and extremity distance will decrease
with a denser flock. Therefore it is interesting to test
at which flock size these reach acceptable levels and
also if what can be considered normal flock sizes
(between 50-250 animals) have an acceptable
uncertainty. In the tests the ratio of animals having
an acceptable uncertainty and extremity distance
were also measured. The limits for these two metrics
were set to 40000 m
2
and 300 m, respectively. These
limits have been set so that animals within those
limits can be found in less than an hour.
Table 3: Average percentage without GPS neighbours.
GPS % 50 sheep 100 sheep 150 sheep 200 sheep 250 sheep
20
72.1 51.7 38.1 27.8 20.5
40
51.4 27.7 14.6 7.7 4.7
60
37.0 15.8 6.8 2.6 1.1
80
28.3 9.2 2.7 1.0 0.5
Table 3 displays the average percentage of non-
GPS animals that did not have any GPS neighbors.
Their uncertainty and extremity distances will
not be counted towards the averages reported in
table 2 and 4. Scenarios that have over 20 % without
GPS neighbors are not suitable for RSSI
trilateration. The animals are too sparsely deployed
in these scenarios.
Table 2 show the average uncertainty area in the
different simulation scenarios. It generally improves
with more GPS nodes. All scenarios have too much
uncertainty, even with 80 % of the nodes having
GPS. This is because RSSI as a range estimator is
not accurate enough.
Table 4 displays the average extremity distance.
The situation here is the same as with the uncertainty
area. Even the best scenario has, on average, over
twice the extremity distance considered adequate.
Table 5 show the percentage of sheep that got an
acceptable uncertainty and an acceptable extremity
distance. This increased with a higher beacon
density, but even with 200 GPS beacons only 2.2 %
of the non-GPS sheep where able to get below the
acceptable uncertainty limits.
The RSSI measurements were performed with
only one type of wireless device. To test the effect of
having more accurate RSSI measurements and
consistent antenna range, simulations were run with
half the measured standard deviation. The extremity
distance of these simulations are shown in table 6.
The distances are slightly more than half of those
measured in table 4. It is still not a good enough
solution, since on average only 59.5 % of the non-
GPS nodes have an acceptable uncertainty even
when 80 % of 250 sheep are equipped with GPS.
Table 4: Average extremity distance among non-GPS
nodes [m].
GPS % 50 sheep 100 sheep 150 sheep 200 sheep 250 sheep
20
2060 1952 1850 1736 1656
40
1959 1745 1558 1389 1244
60
1837 1556 1301 1132 1001
80
1747 1410 1146 980 850
Table 5: Average percentage of non-GPS nodes having an
acceptable uncertainty area and extremity distance.
GPS % 50 sheep 100 sheep 150 sheep 200 sheep 250 sheep
20
0.1 0.2 0.4 0.5 0.5
40
0.3 0.4 0.6 0.8 1.1
60
0.3 0.7 1.2 1.1 1.6
80
0.2 0.9 1.3 1.8 2.2
Table 6: Average extremity distance among non-GPS
nodes [m] with only half of the measured standard
deviance.
GPS % 50 sheep 100 sheep 150 sheep 200 sheep 250 sheep
20
1232 1133 1046 989 918
40
1137 981 845 727 625
60
1076 856 689 560 447
80
934 726 542 422 354
5 CONCLUSIONS
RSSI-based trilateration using GPS beacons is not
suitable for animal tracking. The uncertainty is too
high, even with RSSI measurements twice as
accurate as those obtained during tests. In those tests
SENSORNETS 2012 - International Conference on Sensor Networks
240

factors like placement of the node relative to the
animal’s body, weather conditions and antenna
orientation were not considered. These factors could
increase the RSSI variability significantly, making it
even harder to locate the animals. The variability in
RSSI measured in the tests comes from the impact
the terrain and other non-distance related factors
have on the signal propagation. Topography
becomes more important over long distances,
making animal tracking a particularly poor
application for RSSI-based distance estimation. A
system that does not need to rely on RSSI for
localization would therefore be preferable. Such a
system could make use of the fact that most animals
travel in groups. Therefore if one knows the location
of a group and the group’s members, it is possible to
locate all members. The group’s location could be
established using GPS and the members could be
determined by detecting the recipients of a wireless
broadcast of a membership message. This approach
could save energy and increase robustness compared
to a GPS-only approach.
REFERENCES
Akyildiz, I. F., Su, W., Sankarasubramaniam, Y., Cayirci,
E., 2002. Wireless sensor networks: a survey.
Computer Networks, 38(4), 393-422, Elsevier.
Awad, A., Frunzke, T., Dressler, F., 2007. Adaptive
Distance Estimation and Localization in WSN. Digital
System Design Architectures, Methods and Tools,
2007. DSD 2007. 10th Euromicro Conference on. 471-
478. IEEE.
Barsocchi, P., Lenzi, S., Chessa S., Giunta G., 2009. A
Novel Approach to Indoor RSSI Localization by
Automatic Calibration of the Wireless Propagation
Model. Vehicular Technology Conference, 2009. VTC
Spring 2009. IEEE 69
th
, 1-5, IEEE.
Huircán, J. I., Muñoz, C., Young, H., Von Dossow, L.,
Bustos, J., Vivallo, G., Toneatti, M., ZigBee-based
wireless sensor network localization for cattle
monitoring in grazing fields Computers and
Electronics in Agriculture, 74(1), 258-264, Elsevier.
Hyo-Sung, A., Wonpil, Y., 2009. Environmental-Adaptive
RSSI-Based Indoor Localization. IEEE Transactions
on Automation Science and Engineering, 6(4), 626-
633. IEEE.
Paul, A. S., Wan, E. A., 2009. RSSI-based Indoor
Localization and Tracking Using Sigma-Point Kalman
Smoothers. IEEE Journal of Selected Topics in Signal
Processing, 3(5), 860-873, IEEE.
Sichitiu, M. L., Vaidyanathan, R., Peddabachagari, P.,
2003. Simple Algorithm for Outdoor Localization of
Wireless Sensor Networks with Inaccurate Range
Measurements. Proceedings of the International
Conference on Wireless Networks, ICWN ’03, June
23-26, 2003, Las Vegas, Nevada, USA, 300-305,
CSREA Press.
Thorstensen, B., Syversen, T., Bjørnvold, T. A., Walseth,
T., 2004. Electronic Shepherd – a low cost, low
bandwith, wireless network system. Mobisys ’04
Proceedings of the 2
nd
international Conference on
Mobile Systems, Applications, and Services. 245-255.
ACM.
Yang, Z., Liu, Y., 2010. Quality of trilateration:
Confidence-based iterative localization. IEEE
Transactions on Parallel and Distributed Systems,
21(5), 631-640, IEEE.
UNCERTAINTY IN TRILATERATION - Is RSSI-based Range Estimation Accurate Enough for Animal Tracking?
241
