
TOWARD SOPHISTICATED AGENT-BASED UNIVERSES
Statements to Introduce some Realistic Features into Classic AI/RL Problems
Filipo Studzinski Perotto
Constructivist Artificial Intelligence Research Group, Toulouse, France
Keywords: Agency theory, Factored Partially Observable Markov Decision Process (FPOMDP), Constructivist learning
mechanisms, Anticipatory learning, Model-based reinforcement learning.
Abstract: In this paper we analyze some common simplifications present in the traditional AI / RL problems. We
argue that only facing particular conditions, often avoided in the classic statements, will allow the
overcoming of the actual limits of the science, and the achievement of new advances in respect to realistic
scenarios. This paper does not propose any paradigmatic revolution, but it presents a compilation of several
different elements proposed more or less separately in recent AI research, unifying them by some theoretical
reflections, experiments and computational solutions. Broadly, we are talking about scenarios where AI
needs to deal with true situatedness agency, providing some kind of anticipatory learning mechanism to the
agent in order to allow it to adapt itself to the environment.
1 INTRODUCTION
Every scientific discipline starts by addressing
specific cases or simplified problems, and by
introducing basic models, necessary to initiate the
process of understanding into a new domain of
knowledge; these basic models eventually evolve to a
more complete theory, and little by little, the research
attains important scientific achievements and applied
solutions. Artificial Intelligence (AI) is a quite recent
discipline, and this fact can be easily noticed by
regarding its history in the course of the years. If in
the 1950s and 1960s AI was the stage for optimistic
discourses about the realization of intelligence in
machine, the 1970s and 1980s reveal an evident
reality: true AI is a feat very hard to accomplish. This
movement led AI to plunge into a more pragmatic and
less dreamy period, when visionary ideas have been
replaced by a (necessary) search for concrete
outcomes. Not by chance, several interesting results
have been achieved in these recent years, and it is
changing the skepticism by a (yet timid) revival of the
general AI field.
If on one hand the AI discourse mood has changed
like a sin wave, on the other hand the academic
practice of AI shows a progressive increment of
complexity with respect to the standard problems.
When the solutions designed to some established
problem become stable, known, and accepted, new
problems and new models are proposed in order to
push forward the frontier of the science, moving AI
from toy problems to more realistic scenarios. Make a
problem more realistic is not just increasing the
number of variables involved (even if limiting the
number of considered characteristics is one of the
most recurrent simplifications). When trying to escape
from AI classic maze problems toward more
sophisticated (and therefore more complex) agent-
based universes, we are led to consider several
complicating conditions, like (a) the situatedness of
the agent, which is immersed into an unknown
universe, interacting with it through limited sensors
and effectors, without any holistic perspective of the
complete environment state, and (b) without any a
priori model of the world dynamics, which forces it to
incrementally discover the effect of its actions on the
system in an on-line experimental way; to make
matters worse, the universe where the agent is
immersed can be populated by different kinds of
objects and entities, including (c) other complex
agents, which can have their own internal models, and
in this case the task of learning a predictive model
becomes considerably harder.
In this paper, we use the Constructivist
Anticipatory Learning Mechanism (CALM), defined
in (Perotto, 2010), to support our assumption. In other
words, we shows that the strategies used by this
method can represent a changing of directions in
433
Studzinski Perotto F..
TOWARD SOPHISTICATED AGENT-BASED UNIVERSES - Statements to Introduce some Realistic Features into Classic AI/RL Problems.
DOI: 10.5220/0003835604330438
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 433-438
ISBN: 978-989-8425-95-9
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

relation to classic and yet dominant ways. CALM is
able to build a descriptive model of the system where
the agent is immersed, inducting, from the experience,
the structure of a factored and partially observable
Markov decision process (FPOMDP). Some positive
results (Perotto, 2010), (Perotto et al. 2007), (Perotto;
Alvares, 2007), (Perotto, 2011), have been achieved
due to the use of 4 integrated strategies: (a) the
mechanism takes advantage of the situated condition
presented by the agent, constructing a description of
the system regularities relatively to its own point of
view, which allows to set a good behavior policy
without the necessity of “mapping” the entire
environment; (b) the learning process is anchored on
the construction of an anticipatory model of the
world, which could be more efficient and more
powerful than traditional “model free” reinforcement
learning methods, that directly learn a policy; (c) the
mechanism uses some heuristics designed to well
structured universes, where conditional dependencies
between variables exist in a limited scale, and where
most of the phenomena can be described in a
deterministic way, even if the system as a whole is not
(a partially deterministic environment); which seems
to be widely common in real world problems; (d) the
mechanism is prepared to discover the existence of
hidden or non-observable properties of the universe,
which enables it to explain a larger portion of the
observed phenomena. Following the paper, section 2
overviews the MDP framework and the RL tradition,
section 3 describes the CALM learning mechanism,
section 4 shows some experiments and acquired
results, and section 5 concludes the paper.
2 MDP+RL FRAMEWORK
The typical RL problem is inspired on the classic rat
maze experiment; in this behaviorist test, a rat is
placed in a kind of labyrinth, and it needs to find a
piece of cheese (the reward) that is placed somewhere
far from it, sometimes avoiding electric traps along
the way (the punishment). The rat is forced to run the
maze several times, and the experimental results show
that it gradually discovers how to solve it. The
computational version of this experiment corresponds
to an artificial agent placed in a bi-dimensional grid,
moving over it, and eventually receiving positive or
negative reward signals. Exactly as in the rat maze,
the agent must learn to coordinate its actions by trial
and error, in order to avoid the negative and quickly
achieve the positive rewards. This computational
experiment is formally represented by a geographical
MDP, where each position in the grid corresponds to
a state of the process; the process starts in the initial
state, equivalent to the agent start position in the
maze, and it evolves until the agent reaches some
final reward state; then the process is reset, and a new
episode take place; the episodes are repeated, and the
algorithm is expected to learn a policy to maximize
the estimated discounted cumulative reward that will
be received by the agent in subsequent episodes.
These classic RM maze configurations present at
least two positive points, when comparing to realistic
scenarios: the agent needs to learn actively and on-
line, it means, there is no previous separated time to
learn before the time of the life; the agent must
perform and improve its behavior at the same time,
without supervision, by “trial-and-error”. However,
this kind of experiment cannot be taken as a general
scheme for learning: on the one hand, the
simplifications adopted (in order to eliminate some
uncomfortable elements) cannot be ignored when
dealing with more complex or realistic problems; on
the other hand, there are important features lacking on
the classic RL maze, what makes difficult comparing
it to other natural learning situations. Some of these
simplifications and lacks are listed below:
Non-situativity: in the classic RL maze
configuration, the agent is not really situated in the
environment; in fact, the little object moving on the
screen (which is generally called agent) is dissociated
from the “agent as the learner”; the information
available to the algorithm comes from above, from an
external point of view, in which this moving agent
appears as a controllable object of the environment,
among the others. In contrast, realistic scenarios
impose the agent sensory function as an imprecise,
local, and incomplete window of the underlying
situation stated by the real situation.
Geographic Discrete Flat Representation: in
classic mazes, the corresponding MDP is created by
associating each grid cell to a process state; so, the
problem stays confined in the same two dimensions of
the grid space, and the system states represent nothing
more than the agent geographic positions. In contrast,
realistic problems introduce several new and different
dimensions to the problem. The basic MDP model
itself is conceived to represent a system by exhaustive
enumeration of states (a flat representation), and it is
not appropriated to represent multi-dimensional
structured problems; the size of the state space grows
exponentially up with the number of considered
attributes (curse of dimensionality), which makes the
use of this formalism only viable for simple or small
scenarios.
Disembodiment: in the classic configuration, the
agent does not present any internal property, it is like
ICAART 2012 - International Conference on Agents and Artificial Intelligence
434

a loose mind directly living in the environment; in
consequence, it can be only extrinsically motivated,
i.e. the agent acts in order to attain (or to avoid) some
determined positions into the space, given from the
exterior. In natural scenarios, the agent has a “body”
playing the role of an intermediary between mind and
external world; the body also represents an “internal
environment”, and the goals the agent needs to reach
are given from this embodied perspective (in relation
to the dynamics of some internal properties).
Complete Observation: the basic MDP design the
agent as an omniscient entity; the learning algorithm
observes the system in its totality, it knows all the
possible states, and it can precisely perceive in what
state the system is at every moment, it also knows the
effect of its actions on the system, because in general
it is the only source of perturbation in the world
dynamics. These conditions are far from common in
real-world problems.
Episodic Life and Behaviorist Solution: in the
classic enunciation, the system presents initial and
final states, and the agent lives by episodes; when it
reaches a final state, the system restarts. Generally
this is not the case in real-life problems, where agents
live a unique continuous uninterrupted experience.
Also, solving a MDP is often synonymous of finding
an optimal (or near-optimal) policy, and in this way
most of the algorithms proposed in the literature are
model-free. However, in complex environments, the
only way to define a good policy is “understanding”
what is going on, and creating an explicative or
predictive model of the world, which can then be used
to establish the policy.
2.1 The Basic MDP
Markov Decision Process (MDP) and its extensions
constitute a quite popular framework, largely used for
modeling decision-making and planning problems
(Feinberg, Shwartz, 2002). An MDP is typically
represented as a discrete stochastic state machine; at
each time cycle the machine is in some state s; the
agent interacts with the process by choosing some
action a to carry out; then, the machine changes into a
new state s', and gives the agent a corresponding
reward r; a given transition function δ defines the way
the machine changes according to s and a. The flow
of an MDP (the transition between states) depends
only on the system current state and on the action
taken by the agent at the time. After acting, the agent
receives a reward signal, which can be positive or
negative if certain particular transitions occur.
Solving an MDP is finding the optimal (or near-
optimal) policy of actions in order to maximize the
rewards received by the agent over time. When the
MDP parameters are completely known, including the
reward and the transition functions, it can be
mathematically solved by dynamic programming
(DP) methods. When these functions are unknown,
the MDP can be solved by reinforcement learning
(RL) methods, designed to learn a policy of actions
on-line, i.e. at the same time the agent interacts with
the system, by incrementally estimating the utility of
state-actions pairs and then by mapping situations to
actions (Sutton, Barto 1998).
However, for a wide range of complex (including
real world) problems, the complete information about
the exact state of the environment is not available.
This kind of problem is often represented as a
Partially Observable MDP (POMDP) (Kaelbling et
al., 1998). The POMDP provides an elegant
mathematical framework for modeling complex
decision and planning problems in stochastic domains
in which the system states are observable only
indirectly, via a set of imperfect, incomplete or noisy
perceptions. In a POMDP, the set of observations is
different from the set of states, but related to them by
an observation function, i.e. the underlying system
state s cannot be directly perceived by the agent,
which has access only to an observation o. We can
represent a larger set of problems using POMDPs
rather than MDPs, but the methods for solving them
are computationally even more expensive
(Hauskrecht, 2000).
The main bottleneck about the use of MDPs or
POMDPs is that representing complex universes
implies an exponential growing-up on the state space,
and the problem quickly becomes intractable.
Fortunately, most of real-world problems are quite
well-structured; many large MDPs have significant
internal structure, and can be modeled compactly; the
factorization of states is an approach to exploit this
characteristic (Boutilier et al., 2000). In the factored
representation, a state is implicitly described by an
assignment to some set of state variables. Thus, the
complete state space enumeration is avoided, and the
system can be described referring directly to its
properties. The factorization of states enables to
represent the system in a very compact way, even if
the corresponding MDP is exponentially large
(Guestrin et al. 2003). When the structure of the
Factored Markov Decision Process (FMDP) is
completely described, some known algorithms can be
applied to find good policies in a quite efficient way
(Guestrin et al., 2003). However, the research
concerning the discovery of the structure of an
underlying system from incomplete observation is
still incipient (Degris, Sigaud, 2010).
TOWARD SOPHISTICATED AGENT-BASED UNIVERSES - Statements to Introduce some Realistic Features into
Classic AI/RL Problems
435

2.2 FPOMDP
The classic MDP model can be extended to include
both factorization of states and partial observation,
then composing a Factored Partially Observable
Markov Decision Process (FPOMDP). In order to be
factored, the atomic elements of the non-factored
representation will be decomposed and replaced by a
combined set of elements. A FPOMDP (Guestrin et
al., 2001), (Hansen; Feng, 2000), (Poupart;
Boutilier, 2004), (Shani et al., 2005), (Sim et al.,
2008), can be formally defined as a 4-tuple {X, C, R,
T}. The state space is factored and represented by a
finite non-empty set of system properties or
variables X = {X
1
, X
2
, ... X
n
}, which is divided into
two subsets, X = P ∪ H, where the subset P contains
the observable properties (those that can be accessed
through the agent sensory perception), and the
subset H contains the hidden or non-observable
properties; each property X
i
is associated to a
specified domain, which defines the values the
property can assume; C = {C
1
, C
2
, ... C
m
} represents
the controllable variables, composing the agent
actions; R = {R
1
, R
2
, ... R
k
} is a set of (factored)
reward functions, in the form R
i
: P
i
→ IR, and T =
{T
1
, T
2
, ... T
n
} is a set of transformation functions, as
T
i
: X × C → X
i
, defining the system dynamics. Each
transformation function can be represented by a
Dynamic Bayesien Network (DBN), which is an
acyclic, oriented, two-layers graph. The first layer
nodes represent the environment state in time t, and
the second layer nodes represent the next state, in
t+1 (Boutilier et al. 2000). A stationary policy π is a
mapping X → C where π(x) defines the action to be
taken in a given situation. The agent must learn a
policy that optimizes the cumulative rewards
received over a potentially infinite time horizon.
Typically, the solution π* is the policy that
maximizes the expected discounted reward sum.
In this paper, we consider the case where the agent
does not have an a priori model of the universe where
it is situated (i.e. it does not have any idea about the
transformation function), and this condition forces it
to be endowed with some capacity of learning, in
order to be able to adapt itself to the system. Although
it is possible directly learn a policy of actions, in this
work we are interested in model-based methods,
through which the agent must learn a descriptive and
predictive model of the world, and so define a behavior
strategy based on it. Learning a predictive model is
often referred as learning the structure of the problem.
In this way, when the agent is immersed in a
system represented as a FPOMDP, the complete task
for its anticipatory learning mechanism is both to
create a predictive model of the world dynamics (i.e.
inducing the underlying transformation function of
the system), and to define an optimal (or sufficiently
good) policy of actions, in order to establish a
behavioral strategy. Degris and Sigaud (2010) present
a good overview of the use of this representation in
artificial intelligence, referring algorithms designed to
learn and solve FMDPs and FPOMDPs.
3 ANTICIPATORY LEARNING
In the artificial intelligence domain, anticipatory
learning mechanisms refer to methods, algorithms,
processes, machines, or any particular system that
enables an autonomous agent to create an anticipatory
model of the world in which it is situated. An
anticipatory model of the world (also called predictive
environmental model, or forward model) is an
organized set of knowledge allowing inferring the
events that are likely to happen. For cognitive sciences
in general, the term anticipatory learning mechanism
can be applied to humans or animals to describe the
way these natural agents learn to anticipate the
phenomena experienced in the real world, and to adapt
their behavior to it (Perotto, 2012).
When immersed in a complex universe, an agent
(natural or artificial) needs to be able to compose its
actions with the other forces and movements of the
environment. In most cases, the only way to do so is by
understanding what is happening, and thus by
anticipating what will (most likely) happen next. A
predictive model can be very useful as a tool to guide
the behavior; the agent has a perception of the current
state of the world, and it decides what actions to
perform according to the expectations it has about the
way the situation will probably change. The necessity
of being endowed with an anticipatory learning
mechanism is more evident when the agent is fully
situated and completely autonomous; that means, when
the agent is by itself, interacting with an unknown,
dynamic, and complex world, through limited sensors
and effectors, which give it only a local point of view
of the state of the universe and only partial control over
it. Realistic scenarios can only be successfully faced by
an agent capable of discovering the regularities that
govern the universe, understanding the causes and the
consequences of the phenomena, identifying the forces
that influence the observed changes, and mastering the
impact of its own actions over the ongoing events.
3.1 CALM Mechanism
The constructivist anticipatory learning mechanism
ICAART 2012 - International Conference on Agents and Artificial Intelligence
436

(CALM), detailed in (Perotto, 2010), is a mechanism
developed to enable an agent to learn the structure of
an unknown environment where it is situated, trough
observation and experimentation, creating an
anticipatory model of the world. CALM operates the
learning process in an active and incremental way,
and learn the world model as well as the policy at the
same time it actuates. The agent has a single
uninterrupted interactive experience into the system,
over a theoretically infinite time horizon. It needs
performing and learning at the same time.
The environment is only partially observable from
the point of view of the agent. So, to be able to create
a coherent world model, the agent needs, beyond
discover the regularities of the phenomena, also
discover the existence of non-observable variables
that are important to understand the system evolution.
In other words, learning a model of the world is
beyond describing the environment dynamics, i.e. the
rules that can explain and anticipate the observed
transformations, it is also discovering the existence of
hidden properties (once they influence the evolution
of the observable ones), and also find a way to
deduces the dynamics of these hidden properties. In
short, the system as a whole is in fact a FPOMDP,
and CALM is designed to discover the existence of
non-observable properties, integrating them in its
anticipatory model. In this way CALM induces a
structure to represent the dynamics of the system in a
form of a FMDP (because the hidden variables
become known), and there are some algorithms able
to efficiently calculate the optimal (or near-optimal)
policy, when the FMDP is given (Guestrin et al., 2003).
CALM tries to reconstruct, by experience, each
transformation function T
i
, which will be represented
by an anticipation tree. Each anticipation tree is
composed by pieces of anticipatory knowledge called
schemas, which represent some perceived regularity
occurring in the environment, by associating context
(sensory and abstract), actions and expectations
(anticipations). Some elements in these vectors can
undertake an “undefined value”. For example, an
element linked with a binary sensor must have one of
three values: true, false or undefined (represented,
respectively, by ‘1’, ‘0’ and ‘#’). The learning process
happens through the refinement of the set of schemas.
After each experienced situation, CALM updates a
generalized episodic memory, and then it checks if the
result (context perceived at the instant following the
action) is in conformity to the expectation of the
activated schema. If the anticipation fails, the error
between the result and the expectation serves as
parameter to correct the model. The context and
action vectors are gradually specialized by
differentiation, adding each time a new relevant
feature to identify more precisely the situation class.
The expectation vector can be seen as a label in each
“leaf” schema, and it represents the predicted
anticipation when the schema is activated. Initially all
different expectations are considered as different
classes, and they are gradually generalized and
integrated with others. The agent has two alternatives
when the expectation fails. In a way to make the
knowledge compatible with the experience, the first
alternative is to try to divide the scope of the schema,
creating new schemas, with more specialized
contexts. Sometimes it is not possible and the only
way is to reduce the schema expectation.
CALM creates one anticipation tree for each
property it judges important to predict. Each tree is
supposed to represent the compete dynamics of the
property it represents. From this set of anticipation
trees, CALM can construct a deliberation tree, which
will define the policy of actions. In order to
incrementally construct all these trees, CALM
implements 5 methods: (a) sensory differentiation, to
make the tree grow (by creating new specialized
schemas); (b) adjustment, to abandon the prediction
of non-deterministic events (and reduce the schemas
expectations) (c) integration, to control the tree size,
pruning and joining redundant schemas: (d) abstract
differentiation, to induce the existence of non
observable properties; and (e) abstract anticipation, to
discover and integrate these non-observable properties
in the dynamics of the model.
Sometimes some disequilibrating event can be
explained by considering the existence of some
abstract or hidden property in the environment, which
could be able to differentiate the situation, but which
is not directly perceived by the agent sensors. So,
before adjusting, CALM supposes the existence of a
non-sensory property in the environment, which it
will represent as a abstract element. Abstract elements
suppose the existence of something beyond the
sensory perception, which can be useful to explain
non-equilibrated situations. They have the function of
amplifying the differentiation possibilities.
4 EXPERIMENTS
In (Perotto et al., 2007) the CALM mechanism is used
to solve the flip problem, which creates a scenario
where the discovery of underlying non-observable
states are the key to solve the problem, and CALM is
able to do it by creating a new abstract element to
represent these states. In (Perotto, 2010) and (Perotto;
Álvares, 2007) the CALM mechanism is used to solve
TOWARD SOPHISTICATED AGENT-BASED UNIVERSES - Statements to Introduce some Realistic Features into
Classic AI/RL Problems
437
the wepp problem, which is an interesting RL situated
bi-dimensional grid problem, where it should learn
how to behavior considering the interference of
several dimensions of the environment, and of its
body. Initially the agent does not know anything
about the world or about its own sensations, and it
does not know what consequences its actions imply.
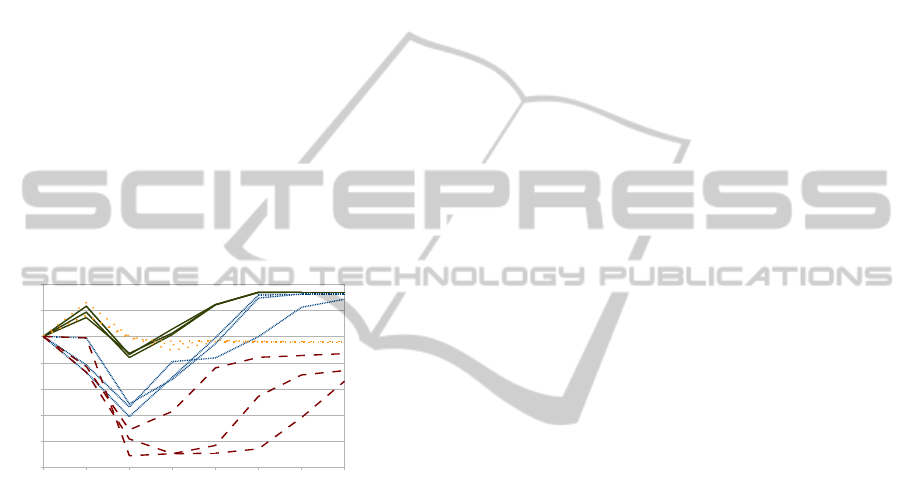
Figure 1 shows the evolution of the mean reward
comparing the CALM solution with a classic Q-
Learning implementation (where the agent have the
vision of the entire environment as flat state space),
and with a situated version of the Q-Learning agent.
We see exactly two levels of performance
improvement. First, the non-situated implementation
(Classic Q) takes much more time to start an
incomplete convergence, and it is vulnerable to the
growing of the board. Second, the CALM solution
converges much earlier than Q-Learning, taken in its
situated version, due to the fact that CALM quickly
constructs a model to predict the environment
dynamics, and it is able to define a good policy sooner.
0 10 100 1000 10 mil 100 mil 1 milhão 10 milhões
-1,00
-0,80
-0,60
-0,40
-0,20
0,00
0,20
0,40
wepp
time cycles (logarithmic scale)
mean reward
CALM
Situated Q
Classic Q
Randomic
Figure 1.
5 CONCLUSIONS
Over the last twenty years, several anticipatory
learning mechanisms have been proposed in the
artificial intelligence scientific literature. Even if
some of them are impressive in theoretical terms,
having achieved recognition from the academic
community, for real world problems (like robotics) no
general learning mechanism has prevailed. Until now,
the intelligent artifacts developed in universities and
research laboratories are far less wondrous than those
imagined by science fiction. However, the continuous
progress in the AI field, combined with the progress
of informatics itself, is leading us to a renewed
increase of interest in the search for more general
intelligent mechanism, able to face the challenge of
complex and realistic problems.
A necessary changing of directions in relation to
the traditional ways to state the problems in AI is
needed. The CALM mechanism, presented in
(Perotto, 2010) has been used as an exemple of it,
because it provides autonomous adaptive capability to
an agent, enabling it to incrementally construct
knowledge to represent the regularities observed
during its interaction with the system, even in non-
deterministic and partially observable environments.
REFERENCES
Boutilier, C.; Dearden, R.; Goldszmidt, M. (2000). Stochastic
dynamic programming with factored representations.
Artificial Intelligence, Elsevier, v.121.
Degris, T.; Sigaud, O. (2010). Factored Markov Decision
Processes. In: Buffet, O; Sigaud, O. (eds.). Markov
Decision Processes in Artificial Intelligence.
Vandoeuvre-lès-Nancy: Loria.
Feinberg, E. A.; Shwartz, A. (2002). Handbook of Markov
Decision Processes: methods and applications. Norwell:
Kluwer.
Guestrin, C.; Koller, D.; Parr, R.; Venkataraman, S. (2003).
Efficient Solution Algorithms for Factored MDPs. Journal
of Artificial Intelligence Research. AAAI Press, v.19.
Hauskrecht, M. (2000). Value-function approximations for
partially observable Markov decision processes. Journal
of Artificial Intelligence Research, AAAI Press, v.13.
Hansen, E. A.; Feng, Z. (2000). Dynamic programming for
POMDPs using a factored state representation. In:
Proceedings of 5
th
AIPS, AAAI Press.
Kaelbling, L. P.; Littman, M. L.; Cassandra, A. R. (1998).
Planning and acting in partially observable stochastic
domains. Artificial Intelligence, Elsevier, v.101.
Perotto, F. S.; Álvares, L. O. (2007). Incremental Inductive
Learning in a Constructivist Agent. In: Proceedings of
SGAI-2006. London: Springer-Verlag.
Perotto, F. S.; Álvares, L. O.; Buisson, J.-C. (2007).
Constructivist Anticipatory Learning Mechanism
(CALM): Dealing with Partially Deterministic and
Partially Observable Environments. In: Proceedings of 7
th
EPIROB, New Jersey: Lund.
Perotto, F. S. (2010). Un Mécanisme Constructiviste
d'Apprentissage Automatique d'Anticipations pour des
Agents Artificiels Situés. PhD Thesis. Toulouse, France:
INP. (in french)
Perotto, F. S. (2012). Anticipatory Learning Mechanisms. In:
Encyclopedia of the Sciences of Learning, Springer.
Poupart, P.; Boutilier, C. (2004). VDCBPI: an approximate
scalable algorithm for large scale POMDPs. In:
Proceedings of 17th NIPS. Cambridge: MIT Press.
Shani, G.; Brafman, R. I.; Shimony, S. E. (2005). Model-
Based Online Learning of POMDPs. In: Proceedings of
16
th
ECML. Berlin: Springer-Verlag. (LNCS 3720).
Sim, H. S.; Kim, K.-E.; Kim, J. H.; Chang, D.-S.; Koo, M.-W.
(2008). Symbolic Heuristic Search Value Iteration for
Factored POMDPs. In: Proc. of 23
rd
AAAI, AAAI Press.
Sutton, R. S.; Barto, A. G. (1998). Reinforcement Learning:
an introduction. MIT Press.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
438
