
FAST STEREO MATCHING METHOD BASED ON OPTIMIZED
CORRELATION ALGORITHM FOR FACE DEPTH ESTIMATION
Amel Aissaoui, R
´
emi Auguste, Tarek Yahiaoui, Jean Martinet and Chaabane Djeraba
LIFL UMR Lille1-CNRS n 8022, IRCICA, 50 avenue Halley, 59658 Villeneuve d’Ascq, France
Keywords:
Face Depth Estimation, Correlation-based Method, Stereovision.
Abstract:
In this paper, we introduce a novel approach for face stereo reconstruction based on stereo vision. The ap-
proach is based on real time generation of facial disparity map, requiring neither expensive devices nor generic
face model. An algorithm based on incorporating topological information of the face in the disparity estimation
process is proposed to enhance the result of the 3D reconstruction. Some experimental results are presented
to demonstrate the reconstruction accuracy of the proposed method.
1 INTRODUCTION
Face depth estimation is an important problem that
was conjointly studied with face animation, facial
analysis and face recognition. In the past few decades,
many approaches have been proposed, including 3D
from stereo matching (Furukawa and Ponce, 2010),
3D morphable model based methods and (Choi et al.,
2010), structure from motion (Chowdhury and Chel-
lappa, 2003) and shape from shading techniques
(Chow and Yuen, 2009). However, how to efficiently
acquire facial depth information from stereo images
is still a challenging problem especially for real time
application.
So far, several attempts have been made to deal
with 3D face reconstruction from stereo images.
(Lengagne et al., 2000) proposed a user interactive ap-
proach to deform an animated 3D mesh model from
two stereo images. They use a priori knowledge and
differential constraints on the 3D model to recover
the surfaces of facial areas that are not reliably ob-
tained from stereo alone. (Mallick and Trivedi, 2003)
use parallel stereo images and a set of manually se-
lected corresponding feature points to compute the
rotation and translation matrix that are used to fit the
3D mesh model to the computed 3D feature points.
(Cryer et al., 1995) proposed to merge the dense depth
maps obtained separately from stereo and Shape From
Shading (SFS) in the frequency domain. The merging
process is based on the assumption that shape from
stereo is good at recovering high frequency informa-
tion and shape from shading is good at recovering low
frequency information. Recently, many methods use
improved SFS techniques to enhance the stereo re-
sults (Chow and Yuen, 2009). (Zheng et al., 2007),
used a reference 3D face as an intermediate for cor-
respondence estimation. The virtual face images with
known correspondences are first synthesized from the
reference face. The known correspondences are then
extended to the incoming stereo face images, using
face alignment and warping. In (Wu et al., 2008), au-
thors do not use any external model, the feature cor-
respondences between images are extracted and the
disparity map is initialized. Then an iterative algo-
rithm was used to refine automatically the disparity
map using other images taken with different baseline.
In this paper, we propose an improved frame-
work for determining the disparity information of a
human face from stereo matching in a binocular vi-
sion system using correlation based methods. While
many stereo matching algorithms have been pro-
posed in recent years (Scharstein and Szeliski, 2002),
correlation-based algorithms still have an edge due
to speed and less memory requirements (Heo et al.,
2011). For the same reasons, we choose to use a cor-
relation based method improved by incorporating the
topological information specific to the face obtained
by fitting an Active Shape Model (ASM) (Milborrow
and Nicolls, 2008) on both images in the initialization
step of the algorithm, while maintaining its real-time
suitability. Our method demonstrated a satisfactory
performance in terms of processing time and point
matching accuracy.
The remainder of this paper is organized as fol-
lows. First, we describe the principle of depth es-
timation in Section 2. In Section 3, we present the
377
Aissaoui A., Auguste R., Yahiaoui T., Martinet J. and Djeraba C..
FAST STEREO MATCHING METHOD BASED ON OPTIMIZED CORRELATION ALGORITHM FOR FACE DEPTH ESTIMATION.
DOI: 10.5220/0003845703770380
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 377-380
ISBN: 978-989-8565-04-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
proposed method. The result of our implementation
is given in Section 4. Finally, Section 5 concludes the
paper.
2 DEPTH ESTIMATION PROCESS
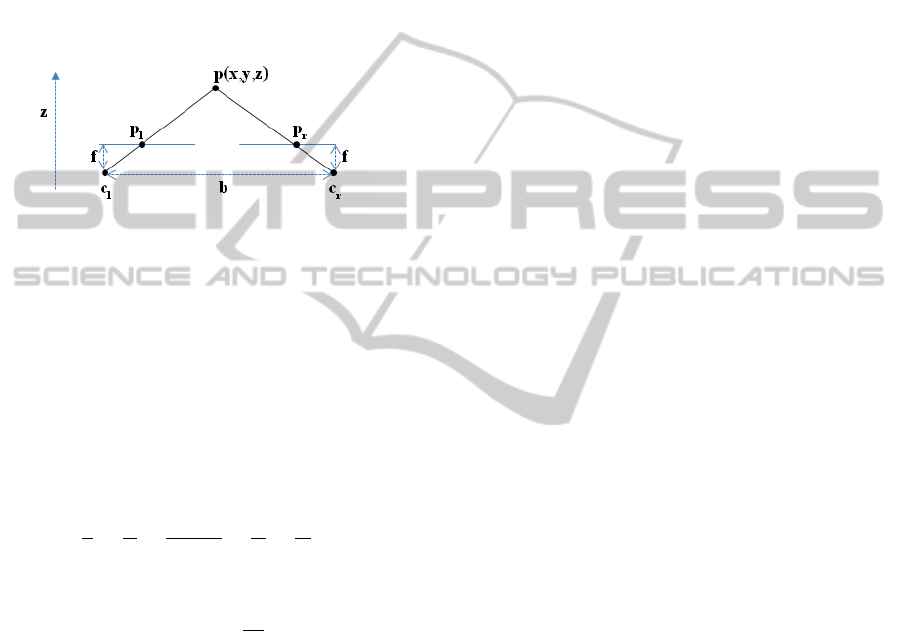
Depth estimation process in binocular stereo system
consists of reconstruction of 3D information of a
scene captured from two different points of view (see
Figure 1).
Figure 1: Geometric model of calibrated stereo vision sys-
tem.
p : is an object point in real word.
p
l
(resp. p
r
) : is the correspondence point of p in left
(resp. right) image.
f : is the camera focal,
b : is the camera baseline,
As Figure 1 shows and according to similar triangles’
principle, the disparity can be formulated as the fol-
lowing generalized form:
z
f
=
x
x
l
=
(x −b)
x
r
=
y
y
l
=
y
y
r
. (1)
From Equation (2) we have:
d = (x − b) =
f b
z
. (2)
Where d is the disparity. Its value increases when
the distance between the point p and the camera de-
creases. To estimate its value, it is necessary to find
pixels in both images that correspond to the projection
of the same real word point. This process is called
stereo matching.
A correlation-based stereo matching algorithms
typically produces dense depth maps by calculating
the matching costs for each pixel at each disparity
level in a certain range. Afterwards, the matching
costs for all disparity levels can be aggregated within
a certain neighborhood window. Finally, the algo-
rithm searches for the lowest cost match for each
pixel. The most common is a simple winner takes-all
(WTA) minimum or maximum search over all possi-
ble disparity levels.
Different cost measures are used in correlation-
based methods. The most common ones are: Sum
of Absolute Differences (SAD), Sum of Squared Dif-
ferences (SSD), Normalized Cross Correlation (NCC)
and Sum of Hamming Distances (SHD).
3 PROPOSED METHOD FOR
DISPARITY ESTIMATION
In order to estimate the disparity map, we adopt a cor-
relation based methods because of their low cost in
processing time. However, photo-consistency mea-
sures used in these methods are not always suffi-
cient to recover precise geometry, particularly in low-
textured scene regions, in case of occlusion and large
disparity. It can therefore be helpful to impose shape
priors that bias the reconstruction to have desired
characteristics.
For this purpose, we use an Active Shape Model
(ASM) to obtain prior topological information about
the face. These information reduce the search area
from the entire epipolar line to only a small segment.
In other words, given a right point in the nose re-
gion of the face, we search only in the same region
in the left image. This guarantees the smoothness of
the disparity map because a point in a topological re-
gion (nose, eye, etc.) in the left image will certainly
matched with a point in the same region in the right
image. As a consequence, disparities values will be
continuous and a pixel in eye region will never exceed
another in nose region.
Fitting the ASM on both images determine the co-
ordinates of the main features points in the right and
left image which are subsequently used to compute
the shift vectors of the corresponding feature points
of the face without applying the classical methods
discussed in Section (2.1). The shift vectors for non-
feature points are then determined using a correlation-
based method using the features point’s disparities.
3.1 Sparse Disparity Calculation
In order to establish the sparse matching, we start by
applying an ASM fitting algorithm on both images.
The ASM algorithm aims to match a statistical face
shape obtained by an offline training process, to a new
face image by updating the model parameters to best
match to all features points (see Figure 2). In our
method, we used the ASM fitting, not only for de-
tection facial features points, but also as an automatic
stereo point matching.
After fitting the ASM, we obtain the 2D coor-
dinates of n face feature points in the right R =
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
378

Figure 2: ASM fitting on left and right stereo images.
(x
i
,y
i
),i ∈ [1, n] and the left L = (x
0
i
,y
0
i
),i ∈ [1, n] im-
ages. Since we use a calibrated system and rectified
stereo pairs, the y coordinates of each corresponding
points are then normalized to their mean. For each
face feature point p
i
, the Euclidian distance between
its right and left coordinates is calculated to obtain its
disparity d(p
i
) as follows:
d(p
i
) =
q
(x
i
− x
0
i
)
2
− (y
i
− y
0
i
)
2
. (3)
After the ASM fitting and the disparity calculation,
we now have a set n of features points with 3 coor-
dinates: P = {p
i
(x,y,d),i ∈ [1, n]} which will used in
the dense disparity calculation step.
3.2 Dense Disparity Calculation
In this step, we calculate disparity of non-
characteristic points of the face using the obtained
sparse representation.
The first step consists of projecting the face fea-
ture points in the 3D space (o,~x,~y,
~
d) to obtain a 3D
ASM for the face. The 3D ASM is then projected on
(o,~x,
~
d) and (o,~y,
~
d) spaces. This step provides infor-
mation about the disparity variation on the horizontal
and the vertical profiles.
Using the characteristic points projected on both
2D plans (o,~x,
~
d) and (o,~y,
~
d), we define the
disparity interval of each point p(x, y) according
to its neighbor characteristic points that are the
left neighbor p
Le f tNeighbor
and the right neighbor
p
RightNeighbor
. The disparity interval on ~x axis is
defined as [DispMin
p
x
,DispMax
p
x
], where DispMin
p
x
is the disparity of p
Le f tNeighbor
and DispMax
p
x
is
that of p
RightNeighbor
. In the same way, we define
the disparity interval according to y coordinate as
[DispMin
p
y
,DispMax
p
y
]. Finally, the disparity interval
of p(x, y) is given as shown in the following equation.
[DispMin
p
,DispMax
p
] = [DispMin
p
x
,DispMax
p
x
]
∪ [DispMin
p
y
,DispMax
p
y
].
(4)
In the second step, we calculate the disparity of
all non-characteristic points, using their disparity in-
tervals to initialize the algorithm of the correlation, to
obtain the dense disparity map.
Given a left image point p
l
, a corre-
lation window w and a disparity interval
[DispMin
p
l
,DispMax
p
l
], we aim at obtaining the
disparity d ∈ [DispMin
p
l
,DispMax
p
l
], which maxi-
mizes the correlation equation E(d) :
E(d) = Similarity(p
l
(x,y), p
r
(x +d,y)) (5)
For the similarity function, we have used the SAD
measure (Hirschmuller, 2001) that it is calculated by
subtracting pixel grey level values within an n ∗ m
rectangular neighborhood window w between the ref-
erence image I
l
and the target image I
r
followed by the
aggregation of absolute differences within the square
window.
SAD
I
l
(x,y),I
r
(x
0
,y
0
))
=
m
∑
u=0
n
∑
v=0
|I
l
(x +u,y + v)
− I
r
(x
0
+ u + d, y
0
+ v)|. (6)
4 RESULTS AND DISCUSSION
In this section, we describe our implementation and
our results. We use, in our work, a Bumblebee stereo-
scopic system composed of two CDD pre-calibrated
cameras mounted on a horizontal support.
In Figure 7, we compare the disparity map esti-
mated by the SAD method to our method that in-
cludes the prior knowledge by applying ASM. Re-
sults show that integrating prior knowledge about face
can enhance the disparity map in terms of smoothness
and also in terms of reducing the missing data named
holes (or noise) occurring from uncertain disparities.
(a)
(b)
Figure 3: Disparity map: (a) SAD correlation based meth-
ods (window 11x11), (b) Our method (SAD+ASM).
In order to obtain the 3D model of the face, The
depth map is generated using Equation (2) in Section
2 and preprocessed by applying an ellipsoid mask to
crop the face region. In order to fill holes, we ap-
plied a selective median filter (with a 7∗7 kernel size),
which is often used to preprocess depth data. A point
cloud for the face is then generated and the texture
FAST STEREO MATCHING METHOD BASED ON OPTIMIZED CORRELATION ALGORITHM FOR FACE DEPTH
ESTIMATION
379

Figure 4: Texture mapping and 3D model generation.
mapping is performed using the OpenGL library of
computer graphics.
The results show that the proposed strategy, con-
sisting of incorporating prior knowledge in the dis-
parity estimation process, is robust and accurate. It
improves the result of general correlation based meth-
ods by considering the face shape and its topological
regions, while maintaining its real-time suitability.
5 CONCLUSIONS AND
PERSPECTIVES
This paper presents an original attempt to a practi-
cal face depth estimation in passive stereoscopic sys-
tem. Unlike other general methods used for dispar-
ity calculation for any object, we introduced a spe-
cific method for depth estimation of face that uses the
shape characteristics of the human face, obtained by
adjusting the form of an active model, to improve re-
sult of the correlation-based method. Our method en-
hanced the classical correlation based method for dis-
parity calculation, in terms of depth estimation effi-
ciency, with maintaining its real-time suitability. The
experimental results show that the proposed algorithm
produces a smooth and dense 3D point cloud model of
human face, applicable to a wide range of real-time
3D face reconstruction situations.
Our approach also opens up many perspectives for
improvement and expansion. The estimation of the
sparse disparity can be improved by using other ver-
sions of the Active Shape Model used in our work.
For instance, Active Appearance Models (Cootes
et al., 2001) is likely to give more successful adjust-
ments because they use the texture information or the
3D Active Appearance Models (Xiao et al., 2004)
which is robust to pose variation. The symmetry pro-
priety of the face can also be incorporated in the esti-
mation process to further improve the results. Finally,
it would be interesting to test our method on a stereo
face database with ground truth. However, existing
databases usually contain scenes and objects. For this,
we plan to create a specific database of stereoscopic
faces with a ground truth to evaluate our method in a
complete way.
REFERENCES
Choi, J., Medioni, G., Lin, Y., Silva, L., Regina, O., Pam-
plona, M., and Faltemier, T. (2010). 3d face recon-
struction using a single or multiple views. In Pattern
Recognition (ICPR), 2010 20th International Confer-
ence on, pages 3959 –3962.
Chow, C. and Yuen, S. (2009). Recovering shape by shading
and stereo under lambertian shading model. Interna-
tional journal of computer vision, 85(1):58–100.
Chowdhury, A. K. R. and Chellappa, R. (2003). Face re-
construction from monocular video using uncertainty
analysis and a generic model. Computer Vision and
Image Understanding, 91:188–213.
Cootes, T., Edwards, G., and Taylor, C. (2001). Active ap-
pearance models. Pattern Analysis and Machine In-
telligence, IEEE Transactions on, 23(6):681–685.
Cryer, J., Tsai, P., and Shah, M. (1995). Integration of
shape from shading and stereo* 1. Pattern recogni-
tion, 28(7):1033–1043.
Furukawa, Y. and Ponce, J. (2010). Accurate, Dense,
and Robust Multiview Stereopsis. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on,
32(8):1362–1376.
Heo, Y. S., Lee, K. M., and Lee, S. U. (2011). Robust stereo
matching using adaptive normalized cross-correlation.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 33:807–822.
Hirschmuller, H. (2001). Improvements in real-time
correlation-based stereo vision. In Stereo and Multi-
Baseline Vision, 2001.(SMBV 2001). Proceedings.
IEEE Workshop on, pages 141–148. IEEE.
Lengagne, R., Fua, P., and Monga, O. (2000). 3d stereo
reconstruction of human faces driven by differential
constraints. Image and Vision Computing, 18(4):337–
343.
Mallick, S. P. and Trivedi, M. (2003). Parametric face mod-
eling and affect synthesis. In Proceedings of the 2003
International Conference on Multimedia and Expo -
Volume 2, ICME ’03, pages 225–228, Washington,
DC, USA. IEEE Computer Society.
Milborrow, S. and Nicolls, F. (2008). Locating facial fea-
tures with an extended active shape model. Computer
Vision–ECCV 2008, pages 504–513.
Scharstein, D. and Szeliski, R. (2002). A taxonomy and
evaluation of dense two-frame stereo correspondence
algorithms. Int. J. Comput. Vision, 47:7–42.
Wu, X., Dai, C., and Liu, J. (2008). A novel approach
for face recognition based on stereo image processing
algorithm. In Audio, Language and Image Process-
ing, 2008. ICALIP 2008. International Conference on,
pages 1245 –1249.
Xiao, J., Baker, S., Matthews, I., and Kanade, T. (2004).
Real-time combined 2d+3d active appearance models.
In IEEE Conference on Computer Vision and Pattern
Recognition, volume 2, pages 535 – 542.
Zheng, Y., Chang, J., Zheng, Z., and Wang, Z. (2007). 3d
face reconstruction from stereo: A model based ap-
proach. In Image Processing, 2007. ICIP 2007. IEEE
International Conference on, pages III –65 –III –68.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
380
