
ON THE EFFECT OF PERSPECTIVE DISTORTIONS
IN FACE RECOGNITION
Zahid Riaz and Michael Beetz
Intelligent Autonomous Systems (IAS), Department of Computer Science,
Technical University of Munich, Munich, Germany
Keywords:
Face Recognition, Active Appearance Models, Feature Extraction, Biometrics.
Abstract:
Face recognition is one of the widely studied topics in the literature image processing and pattern recognition.
Generally for the face images, the distance between camera and face is larger than the face size, hence in
practice the effects of perspective distortions on the face edges are often ignored by the researchers. While
these effects become more prominent if faces are viewed from different angles. In this paper, we study effects
of perspective distortion and obtain improved results for face recognition against varying view-points. The
approach follows by fitting a 3D model to the face images and creating a texture map by texture rectification
at each triangle level. We compare our results with active appearance models (AAM) on two standard face
databases.
1 INTRODUCTION
Over the past few years, several face recognition sys-
tems have been introduced in the commercial market
and have been successfully applied under different
scenarios (Zhao et al., 2003). Despite these efforts,
the performance of the face recognition systems is
still below iris and automated fingerprints identifica-
tion systems (AFIS) due to uniqueness, permanence
and reliability issues (Jain et al., 2005). However,
on the other hand faces are natural way of interac-
tion and non-intrusive. Cognitive sciences explains
human face as a complex 3D object whose defor-
mations can be controlled in a low dimensional sub-
space (O’Toole, 2009)(Blanz and Vetter, 2003) show-
ing several meaningful variations which are challeng-
ing for the researchers towards the development of
a face recognition system. These variations include
changing view-points, varying lighting conditions and
illuminations, facial expressions, temporal deforma-
tions like aging and image acquisition under differ-
ent sessions of the day, occlusions and nevertheless
spoofing.
In this paper we study face recognition problem
under varying view-points and facial expressions by
using a sparse 3D face model. Since faces are cap-
tured in actions, some of the facial areas are under
self occlusions and considered as missing informa-
tion. However, under slight out-of-plane rotations m-
ost of the facial areas are tilted and have very less
textural information due to their oblique shape. In
conventional face modeling approaches (Cootes et al.,
1998), the distortions of these areas at the face edges
are ignored by assuming that the distance between
camera and the face is larger than the original face
size. In these cases, effects of perspective distortions
are ignored to obtain a high recognition rate. How-
ever, we study this problem in detail and obtain an
improved performance by considering the effect of
perspective distortion on local facial areas. The con-
tributions of this paper are two fold: (1) to develop
an unconstrained face recognition system which is ro-
bust against varying facial poses and slight facial ex-
pressions, (2) to study the effect of generally ignored
perspective distortions on facial surface and recom-
mend texture rectification. For this purpose, we use
a generic 3D wireframe face model called Candide-
III (Ahlberg, 2001). This model is defined with 184
triangular patches representing different areas on the
surface of a 3D face. These are sparse flat trian-
gles and capable to deform under facial action cod-
ing system (FACS) (Ekman and Friesen, 1978), ac-
tion units and MPEG-4 facial animations units (Li and
Jain, 2005). Each triangle defines a texture which is
stored in a standard texture map by using camera ro-
tation and translation. This rectified texture increases
the recognition rate as compared to conventional 2D
active appearance models (AAM) (Edwards et al.,
718
Riaz Z. and Beetz M..
ON THE EFFECT OF PERSPECTIVE DISTORTIONS IN FACE RECOGNITION.
DOI: 10.5220/0003859107180722
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 718-722
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

1998) on standard face databases. Model based ap-
proaches for human faces obtained popularity in last
decade due to their compact and detailed representa-
tion (Blanz and Vetter, 2003)(Abate et al., 2007)(Park
et al., 2004)(Cootes et al., 1998). In the literature of
face modeling, some useful face models are point dis-
tribution models (PDM), 3D morphable models, pho-
torealistic models, deformable models and wireframe
models (Abate et al., 2007).
The remaining part of the paper is divided in three
main section. Section 2 discusses face modeling in
detail. In section 3, we thoroughly provide experi-
ments performed using our approach as compared to
conventional AAM. Finally section 4 gives conclu-
sions of our work with future extension of this ap-
proach.
2 HUMAN FACE MODELING
We study structural and textural parameterization of
the face model separately in this section.
2.1 Structural Modeling and Model
Fitting
Our proposed algorithm is initialized by applying a
face detector in the given image. We use Viola and
Jones face detector (Viola and Jones, 2004). If a face
is found then the system proceeds towards face model
fitting. Structural features are obtained after fitting
the model to the face image. For model fitting, lo-
cal objective functions are calculated using haar-like
features. An objective function is a cost function
which is given by the equation 1. A fitting algorithm
searches for the optimal parameters which minimizes
the value of the objective function. For a given image
I, if E(I, c
i
(p)) represents the magnitude of the edge
at point c
i
(p), where p represents set of parameters
describing the model, then objective function is given
by:
f (I, p) =
1
n
n
∑
i=1
f
i
(I, c
i
(p)) =
1
n
n
∑
i=1
(1 − E(I, c
i
(p)))
(1)
Where n = 1, . . . , 113 is the number of vertices c
i
describing the face model. This approach is less prone
to errors because of better quality of annotated images
which are provided to the system for training. Further,
this approach is less laborious because the objective
function design is replaced with automated learning.
For details we refer to (Wimmer et al., 2008).
The geometry of the model is controlled by a set
of action units and animation units. Any shape s can
be written as a sum of mean shape s and a set of action
units and shape units.
s(α, σ) = s + φ
a
α + φ
s
σ (2)
Where φ
a
is the matrix of action unit vectors and
φ
s
is the matrix of shape vectors. Whereas α denotes
action units parameters and σ denotes shape param-
eters (Li and Jain, 2005). Model deformation gov-
erns under facial action coding systems (FACS) prin-
ciples (Ekman and Friesen, 1978). The scaling, rota-
tion and translation of the model is described by
s(α, σ, π) = mRs(α, σ) +t (3)
Where R and t are rotation and translation matri-
ces respectively, m is the scaling factor and π contains
six pose parameters plus a scaling factor. By chang-
ing the model parameters, it is possible to generate
some global rotations and translations. We extract 85
parameters to control the structural deformation.
2.2 View Invariant Texture Extraction
The robustness of textural parameters depend upon
the quality of input texture image. We consider per-
spective transformation because affine warping of the
rendered triangle is not invariant to 3D rigid transfor-
mations. Affine warping works reasonably well if the
triangle is not tilted with respect to the camera coor-
dinate frame. However, most of the triangles on the
edges are tilted and hence texture is heavily distorted
in these triangles. In order to solve this problem we
first apply perspective transformation. Since, the 3D
position of each triangle vertex as well as the cam-
era parameters are known, we determine the homo-
geneous mapping between the image plane and the
texture coordinates by using homography H.
H = K.
r
1
r
2
−R.t
(4)
Where K, R and t denotes the camera matrix, rota-
tion matrix and translation vector respectively, r
1
and
r
2
are the components of rotation matrix. It maps a
2D point of the texture image to the corresponding
2D point of the rendered image of the triangle. A pro-
jection q of a general 3D point p in homogeneous co-
ordinates is,
q = K.
R −R.t
. p (5)
Each 3D homogeneous point lying on a plane with
z = 0, i.e. p = (x y 0 1) leads to above equation. If p
0
being the homogeneous 2D point in texture coordi-
nates then,
ON THE EFFECT OF PERSPECTIVE DISTORTIONS IN FACE RECOGNITION
719

Figure 1: Detailed texture extraction approach described in
section 2.2.
q = K.
r
1
r
2
r
3
−Rt
.
x
y
0
1
= H. p
0
Where R and t are the unknowns to be calculated.
We use the upper triangle from each block of a rect-
angular texture map (see Figure 3) for storing the tex-
ture patches. In order to fit any arbitrary triangle to
this upper triangle, we use an affine transformation A.
The final homogeneous transformation M is given by,
M = A.K.
R −R.t
= A.H (6)
The extracted texture vector g is parameterized by
using principal component analysis (PCA) with mean
vector g
m
and matrix of eigenvectors P
g
to obtain the
parameter vector b
g
(Li and Jain, 2005).
g = g
m
+ P
g
b
g
(7)
2.3 Optimal Texture Representation
Each triangular patch represents meaningful texture
which is stored in a square block of the texture map.
A single unit of the texture map represents a triangu-
lar patch. We experiment with three different sizes
of the texture blocks and choose an optimal size for
our experimentation. These three block sizes include
2
3
× 2
3
, 2
4
× 2
4
and 2
5
× 2
5
. We calculate energy
function from these texture maps of individual per-
sons and observe the energy spectrum of the images
in our database for each triangular patch. If N is the
total number of images, and p
i
be a texel value (which
is equal to a single pixel value) in texture map, then
we define energy function as:
E
j
=
1
N
N
∑
i=1
(p
i
− p
j
)
2
(8)
Where
p
j
is the mean value of the pixels in j
th
block, j = 1 . . . M and M = 184 is the number of
blocks in a texture map. In addition to Equation 8, we
find variance energy by using PCA for each block and
Figure 2: Energy spectrum of two randomly selected sub-
jects from PIE database. Energy values for each patch is
comparatively calculated and observed for three different
texture sizes.
observe the energy spectrum. The variation within
the given block has similar behavior for two kinds of
energy functions except a slight variation in the en-
ergy values. Figure 2 shows the energy values for two
different subjects randomly chosen from our experi-
ments. It can be seen from Figure 2 that behavior of
the textural components is similar between different
texture sizes. The size of the raw feature vector ex-
tracted directly from texture map increases exponen-
tially with the increase of texture block size. If d × d
is the size of the block, then the length of the raw
feature vector is
d(d+1)
2
. This vector length calcula-
tion depends upon how texture is stored in the texture
map. This can be seen in Figure 3. We store each
triangular patch from the face surface to upper trian-
gle of the texture block. The size of raw feature vec-
tor extracted for d = 2
3
, d = 2
4
and d = 2
5
is 6624,
25024 and 97152 respectively. Any higher value will
exponentially increase the raw vector without any im-
provement in the texture energy. We do not consider
higher values due to increase in vector length. The
overall recognition rate produced by different texture
sizes from eight randomly selected subjects with 2145
images from PIE database is shown in Figure 4. The
results are obtained using decision trees and Bayesian
networks for classification. The classification proce-
dure is given in detail in next section 3. By trading off
between the performance and size of the feature vec-
tors, we choose texture block size to 16 × 16 during
our experiments.
3 EXPERIMENTATION
In order to study perspective effects on face im-
ages, we experiment mainly on PIE-database (Ter-
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
720
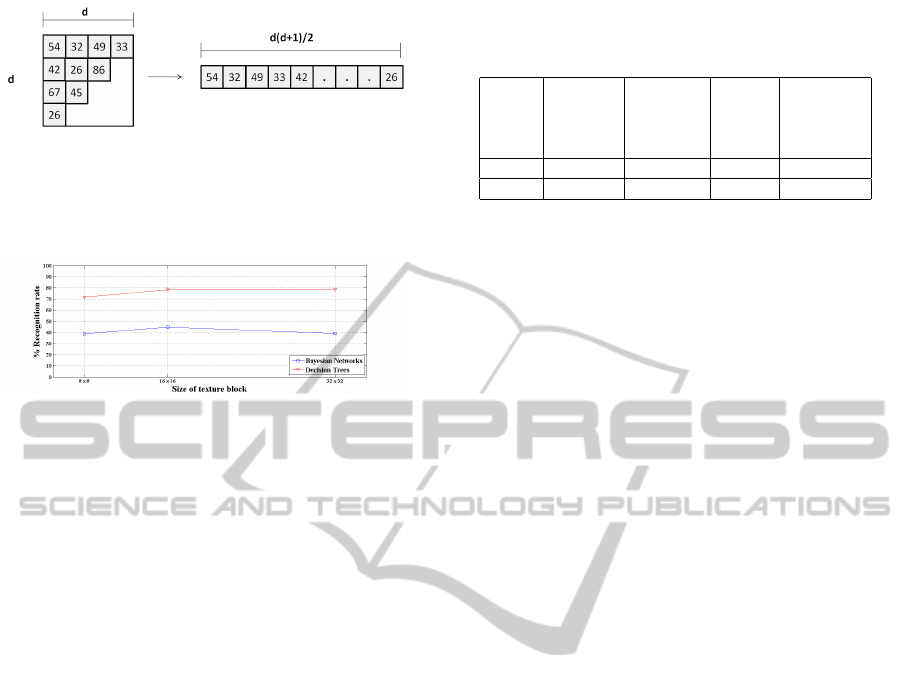
Figure 3: Texture from each triangular patch is stored as
upper triangle of the texture block in texture map. A raw
feature vector is obtained by concatenating the pixel values
from each block.
Figure 4: Comparison over eight random subjects from the
database with three different sizes of texture blocks. Recog-
nition rate slightly improved as texture size is increased
however causes a high increase on the length of raw feature
vector. We compromise on texture block of size 16 × 16.
ence et al., 2002) for face recognition and verify this
fact on FG-NET (FG-NET, 2011) for age estimation.
There are two sessions of PIE database captured from
1) October 2000 to November 2000 and 2) November
2000 to December 2000. The database contains pose,
illuminations and facial expression variations. We ex-
periment on all subject from second session of the
database which consists of 15 subjects with 9162 im-
ages. Since our algorithm starts with Viola and Jones
face detector (Viola and Jones, 2004), hence we con-
sider only those images where face detector results
are positive. In this filteration we obtain 3578 im-
ages where faces are successfully detected. The im-
ages with high pose variations (profile poses), dark ef-
fects and illuminations are filtered out in this step. We
obtain images with frontal, half profile in both direc-
tions, looking upwards and looking downwards faces.
Texture is extracted from each image by using method
described in section 2.2. We obtain 3578 vectors of
25024 length. For dimensionality reduction, we use
40% of the data randomly selected from these raw
features to learn PCA based subspace. For all texture
sizes, we retain 97% of the covariance by choosing
among the eigenvalues. The remaining data is pro-
jected on this space to obtain parameters which serve
as feature vectors. The size of the parameter vector
for three different textures is almost equal. This vec-
tor length is 188, 185 and 186 respectively for 8 × 8,
16 × 16 and 32 × 32.
For classification purpose, we apply decision tree.
However, other classifiers can also be applied depend-
Table 1: Comparison of traditional AAM approach and rec-
tified texture. The results are shown for textural parameters
and combined structural and textural parameters.
Database 2D Texture
parame-
ters
Rectified
Textural
Parameters
AAM 3D Struc-
tural +
Textural
Parameters
PIE 63.02% 69.64% 79.93% 84.15%
FG-NET 51.35% 54.09% 51.15% 55.39%
ing upon the application (Bayesian Networks (BN)
were also used with comparable results during exper-
imentation (refer Figure 4)). We choose J48 decision
tree with 10-fold cross validation algorithm for ex-
perimentation which uses tree pruning called subtree
raising and recursively classifies until the last leave is
pure. The parameters used in decision tree are: con-
fidence factor C = 0.25, with minimum two number
of instances per leaf and C4.5 approach for reduced
error-pruning (Witten and Frank, 2005). Face recog-
nition rate under varying poses and facial expressions
is given in Table 1. In order to verify the effect of
perspective distortions, we further study age classifi-
cation from all subjects of FG-NET database. This
database consists of 1002 images of 62 subjects with
age ranging from 0 −69 years. We divide the database
in seven groups with 10 years band. The results are
shown in Table 1.
4 CONCLUSIONS AND FUTURE
WORK
In this paper, we study a fact that performance of a
face recognition system can be improved by consid-
ering the perspective effect on a face image. This is-
sue is generally not given an attention by the research
community. By ignoring this effect, better recogni-
tion rate can be achieved however by considering this
effect further improvements are achieved. This ap-
proach gives equal weights to each triangular patch
on the surface of the face. However, different weights
can also be applied by considering the context and
prior knowledge of the facial deformations. A remedy
to texture rectification is proposed by applying a 3D
model, which is sparse and achieves better recogni-
tion. The triangular patches which represent the face
surface are flat, however curved triangles can further
improve the results. Since, the proposed solution con-
sists of 3D modeling, it is also recommended to use it
for light modeling to obtain illumination invariance.
ON THE EFFECT OF PERSPECTIVE DISTORTIONS IN FACE RECOGNITION
721

REFERENCES
Abate, A., Nappi, M., Riccio, D., and Sabatino, G. (2007).
2d and 3d face recognition: A survey. Pattern Recog-
nition Letters, 28:1885–1906.
Ahlberg, J. (2001). An experiment on 3d face model adap-
tation using the active appearance algorithm. Im-
age Coding Group, Deptt of Electric Engineering,
Link
¨
oping University.
Blanz, V. and Vetter, T. (2003). Face recognition based
on fitting a 3d morphable model. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
25(9):1063–1074.
Cootes, T., Edwards, G., and Taylor, C. (1998). Active ap-
pearance models. Proceedings of European Confer-
ence on Computer Vision, 2:484–498.
Edwards, G., Cootes, T., and Taylor, C. J. (1998). Face
recognition using active appearance models. In 5th
European Conference on Computer Vision-Volume II,
ECCV ’98, pages 581–595, London, UK. Springer-
Verlag.
Ekman, P. and Friesen, W. (1978). The facial action cod-
ing system: A technique for the measurement of facial
movement. Consulting Psychologists Press.
FG-NET (2011). Fg-net aging database.
http://www.fgnet.rsunit.com/.
Jain, A. K., Bolle, R. M., and Pankanti, S. (2005). Bio-
metrics: Personal Identification in Networked Society.
Springer.
Li, S. Z. and Jain, A. K. (2005). Handbook of Face Recog-
nition. Springer.
O’Toole, A. J. (2009). Cognitive and computational ap-
proaches to face recognition. The University of Texas
at Dallas.
Park, I. K., Zhang, H., Vezhnevets, V., and Choh, H. (2004).
H.k.: Image-based photorealistic 3-d face modeling.
In: FGR, pages 49–56.
Terence, S., Baker, S., and Bsat, M. (2002). The cmu
pose, illumination, and expression (pie) database. In
FGR ’02: Fifth FGR, page 53, Washington, DC, USA.
IEEE Computer Society.
Viola, P. and Jones, M. J. (2004). Robust real-time face
detection. International Journal of Computer Vision,
57(2):137–154.
Wimmer, M., Stulp, F., Pietzsch, S., and Radig, B. (2008).
Learning local objective functions for robust face
model fitting. IEEE PAMI, 30(8):1357–1370.
Witten, I. H. and Frank, E. (2005). Data Mining: Practi-
cal machine learning tools and techniques. Morgan
Kaufmann, San Francisco.
Zhao, W., Chellappa, R., Phillips, P. J., and Rosenfeld, A.
(2003). Face recognition: A literature survey.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
722
