
DETECTOR OF FACIAL LANDMARKS LEARNED
BY THE STRUCTURED OUTPUT SVM
Michal U
ˇ
ri
ˇ
c
´
a
ˇ
r, Vojt
ˇ
ech Franc and V
´
aclav Hlav
´
a
ˇ
c
Center for Machine Perception, Department of Cybernetics, Faculty of Electrical Engineering,
Czech Technical University in Prague, Technick
´
a 2, 166 27 Prague 6, Czech Republic
Keywords:
Facial Landmark Detection, Structured Output Classification, Support Vector Machines, Deformable Part
Models.
Abstract:
In this paper we describe a detector of facial landmarks based on the Deformable Part Models. We treat the task
of landmark detection as an instance of the structured output classification problem. We propose to learn the
parameters of the detector from data by the Structured Output Support Vector Machines algorithm. In contrast
to the previous works, the objective function of the learning algorithm is directly related to the performance of
the resulting detector which is controlled by a user-defined loss function. The resulting detector is real-time on
a standard PC, simple to implement and it can be easily modified for detection of a different set of landmarks.
We evaluate performance of the proposed landmark detector on a challenging “Labeled Faces in the Wild”
(LFW) database. The empirical results demonstrate that the proposed detector is consistently more accurate
than two public domain implementations based on the Active Appearance Models and the Deformable Part
Models. We provide an open-source implementation of the proposed detector and the manual annotation of
the facial landmarks for all images in the LFW database.
1 INTRODUCTION
The detection of facial landmarks like canthi, nose
and mouth corners (see Figure 1) is an essential part
of face recognition systems. The accuracy of the de-
tection significantly influences its final performance
(Beumer and Veldhuis, 2005; Cristinacce et al., 2004;
Riopka and Boult, 2003). The problem of the precise
and robust detection of facial landmarks has received
a lot of attention in the past decade. We briefly review
only the approaches relevant to the method proposed
in this paper.
Among the most popular are detectors based on
the Active Appearance Models (AAM) (Cootes et al.,
Figure 1: Functionality of the facial landmark detector.
2001) which use a joint statistical model of appear-
ance and shape. Detectors build on AAM provide a
dense set of facial features, allowing to extract whole
contours of facial parts like eyes, etc. However high
resolution images are required for both training and
testing stage and the detection leads to solving a non-
convex optimization problem susceptible to local op-
tima unless a good initial guess of the landmark posi-
tions is available.
A straightforward approach to landmark detec-
tion is based on using independently trained detectors
for each facial landmark. For instance the AdaBoost
based detectors and its modifications have been fre-
quently used (Viola and Jones, 2004). If applied in-
dependently, the individual detectors often fail to pro-
vide a robust estimate of the landmark positions. The
weakness of the local evidence can be compensated
by using a prior on the geometrical configuration of
landmarks. The detection is typically carried out in
two consecutive steps. In the first step, the individ-
ual detectors are used to find a set of candidate po-
sitions for each landmark separately. In the second
step, the best landmark configuration with the highest
support from the geometrical prior is selected. The
landmark detectors based on this approach were pro-
547
U
ˇ
ri
ˇ
ca
ˇ
r M., Franc V. and Hlavá
ˇ
c V..
DETECTOR OF FACIAL LANDMARKS LEARNED BY THE STRUCTURED OUTPUT SVM.
DOI: 10.5220/0003863705470556
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 547-556
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

posed for example in (Beumer et al., 2006; Cristi-
nacce and Cootes, 2003; Erukhimov and Lee, 2008;
Wu and Trivedi, 2005).
The Deformable Part Models (DPM) (Crandall
et al., 2005; Felzenszwalb and Huttenlocher, 2005;
Felzenszwalb et al., 2009; Fischler and Elschlager,
1973) go one step further by fusing the local appear-
ance model and the geometrical constraints into a sin-
gle model. The DPM is given by a set of parts along
with a set of connections between certain pairs of
parts arranged in a deformable configuration. A nat-
ural way how to describe the DPM is an undirected
graph with vertices corresponding to the parts and
edges representing the connections between the pairs
of connected parts. The DPM detector estimates all
landmark positions simultaneously by optimizing a
single scoring function composed of a local appear-
ance model and a deformation cost. The complexity
of finding the best landmark configuration depends on
the structure of underlying graph. Acyclic graph al-
lows efficient estimation by a variant of the Dynamic
Programming (DP).
An instance of finely tuned facial landmark detec-
tor based on the DPM has been proposed in (Ever-
ingham et al., 2006). The very same detector was
also used in several successful face recognition sys-
tems described in (Everingham et al., 2009) and (Sivic
et al., 2009). In this case, the local appearance model
is learned by a multiple-instance variant of the Ad-
aBoost algorithm with Haar-like features used as the
weak classifiers. The deformation cost is expressed
as a mixture of Gaussian trees whose parameters are
learned from examples. This landmark detector is
publicly available and we use it for comparison with
our detector
1
. Importantly, learning of the local ap-
pearance model and the deformation cost is done in
two independent steps which simplifies learning, but
may not be optimal in terms of detectors accuracy.
We propose to learn the parameters of the DPM
discriminatively in one step by directly optimizing ac-
curacy of the resulting detector. The main contribu-
tions of this paper are as follows:
1. We treat the landmark detection with the DPM as
an instance of the structured output classification
problem whose detection accuracy is measured by
a loss function natural for this application. We
propose to use the Structured Output SVM (SO-
SVM) (Tsochantaridis et al., 2005) for supervised
learning of the parameters of the landmark detec-
tor from examples. The learning objective of the
1
There also exists a successful commercial so-
lution OKAO Vision Facial Feature Extraction API
(http://www.omron.com) which is used for example in
Picasa
TM
or Apple iPhoto
TM
software.
SO-SVMs is directly related to the accuracy of the
detector. In contrast, all existing approaches we
are aware of optimize surrogate objective func-
tions whose relation to the detector accuracy is not
always clear.
2. We empirically evaluate accuracy of the proposed
landmark detector learned by the SO-SVMs on a
challenging “Labeled Faces in the Wild” database
(Huang et al., 2007).
3. We provide an empirical comparison of two popu-
lar optimization algorithms — the Bundle Method
for Regularized Risk Minimization (BMRM) (Teo
et al., 2010) and the Stochastic Gradient Descend
(SGD) (Bordes et al., 2009) — which are suit-
able for solving the convex optimization problem
emerging in the SO-SVM learning.
4. We provide an open source library which imple-
ments the proposed detector and the algorithm for
supervised learning of its parameters. In adidtion
we provide a manual annotation of the facial land-
marks for all images from the LFW database.
The paper is organized as follows. Section 2 de-
fines the structured output classifier for facial land-
mark detection based on the DPM. Section 3 de-
scribes the SO-SVM algorithm for learning the pa-
rameters of the classifier from examples. Experimen-
tal results are presented in Section 4. Section 5 shortly
describes the open source implementation of our de-
tector and the provided manual annotation of the LFW
database. Section 6 concludes the paper.
2 THE STRUCTURED OUTPUT
CLASSIFIER FOR FACIAL
LANDMARK DETECTION
We treat the landmark detection as an instance of
the structured output classification problem. We as-
sume that the input of our classifier is a still image
of fixed size containing a single face. In our exper-
iments we construct the input image by cropping a
window around a bounding box found by a face de-
tector (enlarged by a fixed margin ensuring the whole
face is contained) and normalizing its size. The clas-
sifier output are estimated locations of a set of facial
landmarks. A formal definition is given next.
Let J = X
H×W
be a set of input images with
H × W pixels where X denotes a set of pixel val-
ues which in our experiments, dealing with 8bit gray-
scale images, is X = {0, ..., 255}. We describe the
configuration of M landmarks by a graph G = (V,E),
where V = {0,. .. ,M − 1} is a set of landmarks and
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
548

s
0
face center
s
1
canthus-rl
s
2
canthus-lr
s
3
mouth-corner-r
s
4
mouth-corner-r
s
5
canthus-rr
s
6
canthus-ll
s
7
nose
(a) (b)
Figure 2: Definition of (a) the underlying graph G = (V,E)
for the landmark configuration and (b) the components of
the proposed detector.
E ⊂ V
2
is a set of edges defining the neighbouring
landmarks. Each landmark is assigned a position s
i
∈
S
i
⊂ {1,...,H} × {1,. .. ,W } where S
i
denotes a set
of all admissible positions of the i-th landmark within
the image I ∈ J . The quality of a landmark configura-
tion s = (s
0
,. .. ,s
M−1
) ∈ S = S
0
×···×S
M−1
given an
input image I ∈ J is measured by a scoring function
f : J × S → R defined as
f (I,s) =
∑
i∈V
q
i
(I,s
i
) +
∑
(i, j)∈E
g
i j
(s
i
,s
j
) . (1)
The first term in (1) corresponds to a local appear-
ance model evaluating the match between landmarks
on positions s and the input image I. The second term
in (1) is the deformation cost evaluating the relative
positions of the neighboring landmarks i and j.
We assume that the costs q
i
: J × S
i
→ R,i =
0,. .. ,M − 1 and g
i j
: S
i
× S
j
→ R,(i, j) ∈ E are lin-
early parametrized functions
q
i
(I,s
i
) = hw
q
i
,Ψ
q
i
(I,s
i
)i (2)
g
i j
(s
i
,s
j
) = hw
g
i j
,Ψ
g
i j
(s
i
,s
j
)i, (3)
where Ψ
q
i
: J × S
i
→ R
n
iq
, Ψ
g
i j
: S
i
× S
j
→ R
n
ig
,i =
0,. .. ,M −1 are predefined maps and w
q
i
∈ R
n
iq
,w
g
i j
∈
R
n
ig
,i = 0, .. ., M −1 are parameter vectors which will
be learned from examples. Let us introduce a joint
map Ψ : J × S → R
n
and a joint parameter vector
w ∈ R
n
defined as a column-wise concatenation of
the individual maps Ψ
q
i
,Ψ
g
i j
and the individual param-
eter vectors w
q
i
,w
g
i j
respectively. With these defini-
tions we see that the scoring function (1) simplifies to
f (I,s) =
h
w,Ψ(I, s)
i
.
Given an input image I, the structured output clas-
sifier returns the configurations
ˆ
s computed by maxi-
mizing the scoring function f (I,s), i.e.
ˆ
s ∈ argmax
s∈S
f (I,s) . (4)
We assume that the graph G = (V,E) is acyclic (see
Figure 2(a)), which allows efficient solving of the
maximization problem (4) by dynamic programming.
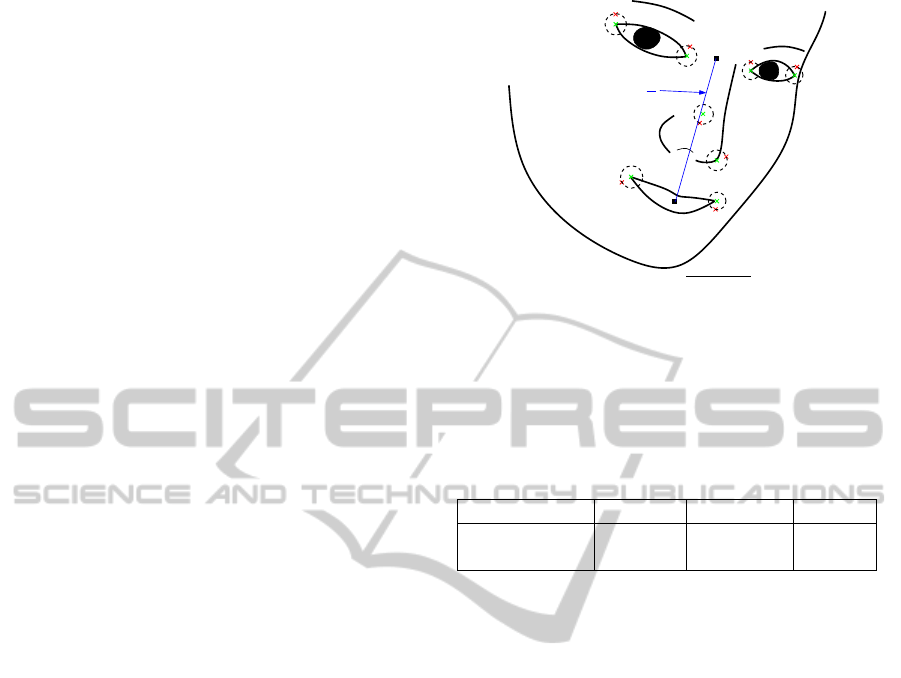
Figure 3: Left: optimal search spaces for each component.
Right: the same search spaces made symmetrical along the
vertical magenta line.
A complete specification of the structured classi-
fier (4) requires to define:
• The maps Ψ
q
i
(I,s
i
),i = 0,...,M − 1 where
Ψ
q
i
(I,s
i
) defines a local feature descriptor of i-th
landmark computed on a rectangular window cen-
tered at s
i
. We call the rectangular window a com-
ponent (see Figure 2(b)). The size of the compo-
nent and its feature descriptor are crucial design
options which have to be made carefully. In Sec-
tion 2.1 we describe a list of feature descriptors
we have considered.
• The fixed maps Ψ
g
i j
(s
i
,s
j
),(i, j) ∈ E defining the
parametrization of the deformation cost. Section
2.2 describes the parametrization which we have
considered.
• The set S = (S
0
× ··· × S
M−1
) defining the search
space of the landmark positions. These sets can
be interpreted as hard constraints on the admissi-
ble configurations of the landmarks, i.e. the land-
mark positions outside these sets corresponds to
−∞ value of the deformation cost g
i j
(s
i
,s
j
).
We tune the size of these search spaces ex-
perimentally — we keep track of the axis
aligned bounding box (AABB) for each compo-
nent trough the whole database excluding the im-
ages whose components does not fit in the image.
We set the size of components in order to keep at
least 95% images of the original database. Con-
sequently, the AABB of each component is made
vertically symmetric along the center y-axis in or-
der to remove bias to certain positions. Figure 3
visualizes the found search spaces.
• The joint parameter vector w ∈ R
n
learned from
the training examples by the SO-SVM algorithm
described in Section 3.
Finally we would like to stress that the particular
number of landmarks and their neighborhood struc-
ture can be arbitrary as long as the inference prob-
lem (1) can be solved efficiently. In this paper we
experiment with the 8-landmarks variant of the graph
DETECTOR OF FACIAL LANDMARKS LEARNED BY THE STRUCTURED OUTPUT SVM
549

G = (V,E) shown in Figure 2(a).
2.1 Appearance Model
We have experimented with several feature descrip-
tors Ψ
q
i
for the local appearance model q
i
(I,s
i
). In
particular, we considered i) normalized intensity val-
ues, ii) derivatives of image intensity values, iii) his-
tograms of Local Binary Patterns (LBP) (Heikkil
¨
a
et al., 2009) and iv) the LBP pyramid feature descrip-
tor (Franc and Sonnenburg, 2010). We obtained the
best results with the LBP pyramid feature descriptor
which is used in the experiments. The LBP pyramid
descriptor is constructed by concatenating binary en-
coded LBP features computed in each pixel (up to
boundary pixels) and in several scales. In particular,
we use the LBP pyramid computed in 4 scales starting
from the original image and consequently downscal-
ing the image 3 times by 1/2. The resulting feature
vector is high dimensional but very sparse.
2.2 Deformation Cost
We have experimented with two parametrizations of
the deformation cost g
i j
(s
i
,s
j
): i) a table represen-
tation and ii) a quadratic function of a displacement
vector between landmark positions.
The table representation is the most generic form
of the deformation cost useful when no prior knowl-
edge is available. Table elements specify cost for each
combination of s
i
and s
j
separately. Ψ
g
i j
(s
i
,s
j
) is a
sparse vector with all elements zero but the element
corresponding to the combinations (s
i
,s
j
) which is
one. Though the table representation is very flexi-
ble its main disadvantage is a very large number of
parameters to be learned. In turn, a large number of
training examples is required to avoid over-fitting.
As the second option, we considered the defor-
mation cost g
i j
(s
i
,s
j
) to be a quadratic function of a
displacement vector s
j
− s
i
. Following (Felzenszwalb
et al., 2009), we define the deformation cost as
Ψ
g
i j
(s
i
,s
j
) = (dx,dy, dx
2
,dy
2
)
(dx,dy) = (x
j
,y
j
) − (x
i
,y
i
)
(5)
This representation accounts for the distance and the
direction of the j-th landmark with respect to i-th
landmark. This representation is determined only by
four parameters which substantially reduces the risk
of over-fitting.
We found experimentally the quadratic deforma-
tion cost to give slightly better results compared to
the table representation.
3 LEARNING THE PARAMETERS
OF THE STRUCTURED
OUTPUT CLASSIFIER
We learn the joint parameter vector w by the SO-SVM
algorithm (Tsochantaridis et al., 2005). The require-
ments on the classifier are specified by a user defined
loss-function L : S × S → R. The value L(s,s
∗
) pe-
nalizes the classifier estimate s provided the actual
configuration of the landmarks is s
∗
. The SO-SVM
requires loss function to be non-negative and zero iff
the estimate is absolutely correct, i.e. L(s,s
∗
) ≥ 0,
∀s,s
∗
∈ S , and L(s,s
∗
) = 0 iff s = s
∗
. In particular,
we use the mean normalized deviation between the
estimated and the ground truth positions as the loss
function, i.e.,
L(s,s
∗
) = κ(s
∗
)
1
M
M−1
∑
j=0
ks
j
− s
∗
j
k. (6)
The normalization factor κ(s
∗
) = k
1
2
(s
eyeR
+ s
eyeL
) −
s
mouth
k
−1
is reciprocal to the face size which we
define as the length of the line connecting the mid-
point between the eye centers s
eyeR
and s
eyeL
with the
mouth center s
mouth
. The normalization factor is in-
troduced in order to make the loss function scale in-
variant which is necessary because responses of the
face detector used to construct the input images do
not allow accurate estimation of the scale. Figure 4
illustrates the meaning of the loss function (6). Fi-
nally, we point out that any other loss function meet-
ing the constraints defined above can be readily used,
e.g. one can use maximal normalized deviation.
Given a set of training examples
{(I
1
,s
1
),. .. ,(I
m
,s
m
)} ∈ (J × S )
m
composed of
pairs of the images and their manual annotations,
the parameter w of the classifier (4) is obtained by
solving the following convex minimization problem
w
∗
= argmin
w∈R
n
λ
2
kwk
2
+ R(w)
, where (7)
R(w) =
1
m
m
∑
i=1
max
s∈S
L(s
i
,s) +
w,Ψ(I
i
,s)
−
1
m
m
∑
i=1
w,Ψ(I
i
,s
i
)
.
(8)
The number λ ∈ R
+
is a regularization constant
whose optimal value is tuned on a validation set. R(w)
is a convex piece-wise linear upper bound on the em-
pirical risk
1
m
∑
m
i=1
L(s
i
,arg max
s∈S
f (I
i
,s)). That is,
the learning algorithm directly minimizes the perfor-
mance of the detector assessed on the training set and
at the same time it controls the risk of over-fitting via
the norm of the parameter vector.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
550

Though the problem (7) is convex its solving is
hard. The hardness of the problem can be seen when it
is expressed as an equivalent quadratic program with
m|S | linear constrains (recall that |S | is the number
of all landmark configurations). This fact rules out
off-the-shelf optimization algorithms.
Thanks to its importance a considerable effort has
been put to a development of efficient optimization
algorithms for solving the task (7). There has been
an ongoing discussion in the machine learning com-
munity trying to decide whether approximative on-
line solvers like the SGD are better than the accurate
slower solvers like the BMRM. No definitive consen-
sus has been achieved so far. We contribute to this
discussion by providing an empirical evaluation of
both approaches on the practical large-scale problem
required to learn the landmark detector. The empir-
ical results are provided in section 4.5. For the sake
of self-consistency, we briefly describe the considered
solvers, i.e. the BMRM and the SGD algorithm, in the
following two sections.
3.1 Bundle Methods for Regularized
Risk Minimization
The BMRM is a generic method for minimization of
regularized convex functions (Teo et al., 2010), i.e.
BMRM solves the following convex problem
w
∗
= argmin
w∈R
n
F(w) :=
λ
2
kwk
2
+ R(w),
where R : R
n
→ R is an arbitrary convex function.
The risk term R(w) is usually the complex part of the
objective function which makes the optimization task
hard. The core idea is to replace the original problem
by its reduced problem
w
t
= argmin
w∈R
n
F
t
(w) :=
λ
2
kwk
2
+ R
t
(w) . (9)
The objective function F
t
(w) of the reduced prob-
lem (9) is obtained after replacing the risk R(w) in
the original objective F(w) by its cutting plane model
R
t
(w) = max
i=0,1,...,t−1
R(w
i
+ hR
0
(w
i
),w −w
i
i
, (10)
where R
0
(w
i
) ∈ R
n
denotes a subgradient of R(w)
evaluated at the point w
i
∈ R
n
.
Starting from an initial guess w
0
= 0, the BMRM
algorithm computes a new iterate w
t
by solving the
reduced problem (9). In each iteration t, the cutting
plane model (10) is updated by a new cutting plane
computed at the intermediate solution w
t
leading to
a progressively tighter approximation of F(w). The
BMRM algorithm halts if the gap between F(w
t
) (an
upper bound on F(w
∗
)) and F
t
(w
t
) (a lower bound on
F(w
∗
)) falls below a desired ε, meaning that F(w
t
) ≤
F(w
∗
) + ε. The BMRM algorithm halts after at most
O(1/ε) iterations for arbitrary ε > 0 (Teo et al., 2010).
The reduced problem (9) can be expressed as an
equivalent convex quadratic program with t variables.
Because t is usually small (up to a few hundreds), off-
the-shelf QP solvers can be used.
Before applied to a particular problem, the
BMRM algorithm requires a procedure which for a
given w returns the value of the risk R(w) and its sub-
gradient R
0
(w). In our case the risk R(w) is defined
by (8) and its sub-gradient can be computed by the
Danskin’s theorem as
R
0
(w) =
1
m
m
∑
i=1
Ψ(I
i
,
ˆ
s
i
) − Ψ(I
i
,s
i
)
, (11)
ˆ
s
i
= argmax
s∈S
h
L(s
i
,s) +
w,Ψ(I
i
,s)
i
.(12)
Note that the evaluation of R(w) and R
0
(w) is dom-
inated by the computation of the scalar products
hw,Ψ(I
i
,s)i, i = 1, .. ., m, s ∈ S , which, fortunately,
can be efficiently parallelized.
3.2 Stochastic Gradient Descent
Another popular method solving (7) is the Stochastic
Gradient Descent (SGD) algorithm. We use the mod-
ification proposed in (Bordes et al., 2009) which uses
two neat tricks. Starting from an initial guess w
0
, the
SGD algorithm iteratively changes w by applying the
following rule:
w
t+1
= w
t
−
λ
−1
t
0
+t
g
t
, g
t
= λw
t
+ h
t
(13)
t
0
is a constant and t is the number of the iteration.
The SGD implementation proposed in (Bordes et al.,
2009) tunes the optimal value of t
0
on a small por-
tion of training examples sub-sampled from training
set. The sub-gradient is computed in almost the same
manner as in (11), but only for one training image at
a time, i.e., h
t
= Ψ(I
t
,
ˆ
s
t
) − Ψ(I
t
,s
t
).
In addition, (Bordes et al., 2009) propose to ex-
ploit the sparsity of the data in the update step. The
equation (13) can be expressed as
w
t+1
= w
t
− α
t
w
t
− β
t
h
t
, where (14)
α =
1
t
0
+t
, β =
λ
−1
t
0
+t
(15)
Note that if h
t
is sparse then subtracting β
t
h
t
in-
volves only the nonzero coefficients of h
t
, but sub-
tracting α
t
w
t
involves all coefficients of w
t
. In turn, it
is beneficial to reformulate the equation (14) as
w
t+1
= (1 − α
t
)w
t
− β
t
h
t
. (16)
DETECTOR OF FACIAL LANDMARKS LEARNED BY THE STRUCTURED OUTPUT SVM
551
By using this trick, the complexity O(d) corre-
sponding to the na
¨
ıve implementation of the update
rule (13) reduces to the complexity O(d
non−zero
) cor-
responding to the reformulated rule (16), where d is
the dimension of the parameter vector and d
non−zero
is
the number of the non-zero elements in h
t
. Typically,
like in our case, d
non−zero
is much smaller than d.
A considerable advantage of the SGD algorithm
is its simplicity. A disadvantage is that the SGD al-
gorithm does not provide any certificate of optimality
and thus theoretically grounded stopping condition is
not available.
4 EXPERIMENTS
In this section, we present experimental evaluation of
the proposed facial landmark detector and its com-
parison against three different approaches. We con-
sidered the detector estimating positions of the eight
landmarks: the canthi of the left and the right eye, the
corners of the mouth, the tip of the nose and the center
of the face. The corresponding graph (V, E) is shown
in Figure2(a).
In section 4.1, we describe the face database and
the testing protocol used in the experiments. The
competing methods are summarized in Section 4.2.
The results of the comparison in terms of detection ac-
curacy and basic timing statistics are presented in Sec-
tion 4.4. Finally, in Section 4.5 we compare two algo-
rithms for solving the large-scale optimization prob-
lems emerging in the SO-SVM learning, namely, the
BMRM and the SGD algorithm.
4.1 Database and Testing Protocol
We use the Labeled Faces in the Wild (LFW) database
(Huang et al., 2007) for evaluation as well as for train-
ing of our detector. This database consists of 13,233
images each of size 250 × 250 pixels. The LFW
database contains a great ethnicity variance and the
images have challenging background clutter. We aug-
mented the original LFW database by adding manual
annotation of the eight considered landmarks.
We randomly split the LFW database into training,
testing and validation sets. Table 1 describes this par-
titioning. The experimental evaluation of all compet-
ing detectors was made on the same testing set. The
training and the validation parts were used for learn-
ing of the proposed detector and the base line SVM
detector. The other competing detectors had their own
training databases.
In order to evaluate the detectors, we use two ac-
curacy measures: i) the mean normalized deviation
1
κ
5
1
3
4
7
0
2
6
L(s,ˆs) = κ
0
+···+
8
8
L
max
(s,ˆs) = κ max{
0
, . . . ,
8
}
Figure 4: The illustration of two accuracy statistics used
to benchmark the detectors. The green and the red crosses
denote the manually annotated landmarks and the detected
landmarks, respectively. The deviations ε
0
,.. .,ε
7
corre-
spond to radii of the dashed circles.
Table 1: The partitioning of the LFW database into training,
validation and testing set.
Data set Training Validation Testing
Percentage 60% 20% 20%
# of examples 6,919 2,307 2,316
L(s,s
0
) defined by equation (6) and ii) the maximal
normalized deviation
L
max
(s,
ˆ
s) = κ(s) max
j=0,...,M−1
ks
j
−
ˆ
s
j
k, (17)
where s = (s
0
,. .. ,s
M−1
) are the manually annotated
landmark positions and
ˆ
s = (
ˆ
s
0
,. .. ,
ˆ
s
M−1
) are the
landmark positions estimated by the tested detector.
Figure 4 illustrates both accuracy measures.
4.2 Competing Methods
In this section, we outline all detectors that were used
in the experimental evaluation.
4.2.1 Proposed Detector
The proposed detector estimates the landmark posi-
tions according to the formula (4). As the feature de-
scriptor Ψ
q
i
(I,s
i
) defining the local appearance model
q
i
(I,s
i
), we use the LBP pyramid described in Sec-
tion 2.1. As the parametrization Ψ
g
i j
(s
i
,s
j
) of the de-
formation cost g
i j
(s
i
,s
j
), we use the quadratic func-
tion described in Section 2.2. The parameter vec-
tor w of the classifier (4) is trained from the training
part of the LFW database using the BMRM algorithm
(c.f. Section 3.1). The regularization constant λ ap-
pearing in the learning problem (7) was selected from
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
552

the set {10,1,0.1,0.01,0.001} to minimize the aver-
age mean normalized deviation R
VAL
computed on the
validation part of the LFW database.
4.2.2 Independently Trained SVM Detector
This detector is formed by standard two-class linear
SVM classifiers trained independently for each land-
mark. For training, we use the SVM solver imple-
mented in LIBOCAS (Franc and Sonnenburg, 2010).
For each individual landmark we created a different
training set containing examples of the positive and
negative class. The positive class is formed by images
cropped around the ground truth positions of the re-
spective component. The negative class contains im-
ages cropped outside the ground truth regions. Specif-
ically, the negative class images satisfy the following
condition
P
x
−
− P
x
GT
>
1
2
width
GT
,
P
y
−
− P
y
GT
>
1
2
height
GT
where P
x
−
and P
x
GT
is the x-coordinate of the neg-
ative and the ground truth component respectively.
height
GT
and width
GT
denote the width and the height
of the component.
We use the LBP-pyramid descriptor (see Sec-
tion 2.1) as the features. The parameters of the linear
SVM classifier are learned from the training part of
the LFW database. The SVM regularization constant
C was selected from the set {10, 1,0.1, 0.01,0.001}
to minimize the classification error computed on the
validation part of the LFW database.
Having the binary SVM classifiers trained for all
components, the landmark position is estimated by
selecting the place with the maximal response of the
classifier scoring function, evaluated in the search re-
gions defined for each component differently. The
search regions as well as the sizes of the components
are exactly the same as we use for the proposed SO-
SVM detector.
Note that the independently trained SVM detector
is a simple instance of the DPM where the deforma-
tion cost g
i j
(s
i
,s
j
) is zero for all positions inside the
search region and −∞ outside. We compare this base-
line detector with the proposed SO-SVM detector to
show that by learning the deformation cost from data
one can improve the accuracy.
4.2.3 Active Appearance Models
We use a slightly modified version of a publicly avail-
able implementation of the AAM (Kroon, 2010). As
the initial guess of the face position required by the
AAM, we use the center of the bounding box obtained
from a face detector. The initial scale is also com-
puted from this bounding box. The AAM estimates
a dense set of feature points which are distributed
around important face contours like the contour of
mouth, eyes, nose, chin and eyebrows. The AAM
requires a different training database which contains
high resolution images along with annotation of all
contour points.
For training the AAM model we use a publicly
available IIM Face database (Nordstrøm et al., 2004).
The IIM database consists of 240 annotated images
(6 images per person). Each image is 640 × 480 pixel
in size and comes with 58 manually annotated points
which are distributed along the main face contours.
Note that the creation of training examples for the
AAM put much higher demands on the annotator—
he/she has to click a large number of uniformly dis-
tributed points. In contrast, our method requires anno-
tation of only a small number of well defined points.
Specifically, the whole IIM database requires to an-
notate 13920 points, carefully distributed along each
contour, while the LFW database requires to annotate
48433 points, which are well defined and easy to an-
notate.
To compare the AAM based detector with our de-
tector, we have to transform the output of the AAM,
i.e. the points on contours around important face
parts, to the landmark positions returned by our detec-
tor. We simply select the relevant points on contours.
4.3 Detector of Everingham et al.
The last competing detector is the DPM based detec-
tor of (Everingham et al., 2008). This detector was
trained on a collection of consumer images which,
however, are not available. This detector returns can-
thi of both eyes (4 landmarks), corners of the mouth
(2 landmarks) and 3 landmarks on the nose. To com-
pare this detector, we consider only the relevant land-
marks for our detector. Note that unlike the proposed
SO-SVM detector, this detector learns the local ap-
pearance model and the deformation cost of the DPM
independently.
4.4 Results
In this section, we describe results of the experimental
evaluation of the detection accuracy of all competing
detectors. We have measured the mean and the max-
imal normalized deviation computed on the test part
of the LFW database.
Table 2 shows the average mean normalized de-
viation R
TST
and the the average maximal normal-
ized deviation R
max
TST
for each individual detector. The
results show that the proposed detector consistently
outperforms all other competing methods irrespective
DETECTOR OF FACIAL LANDMARKS LEARNED BY THE STRUCTURED OUTPUT SVM
553
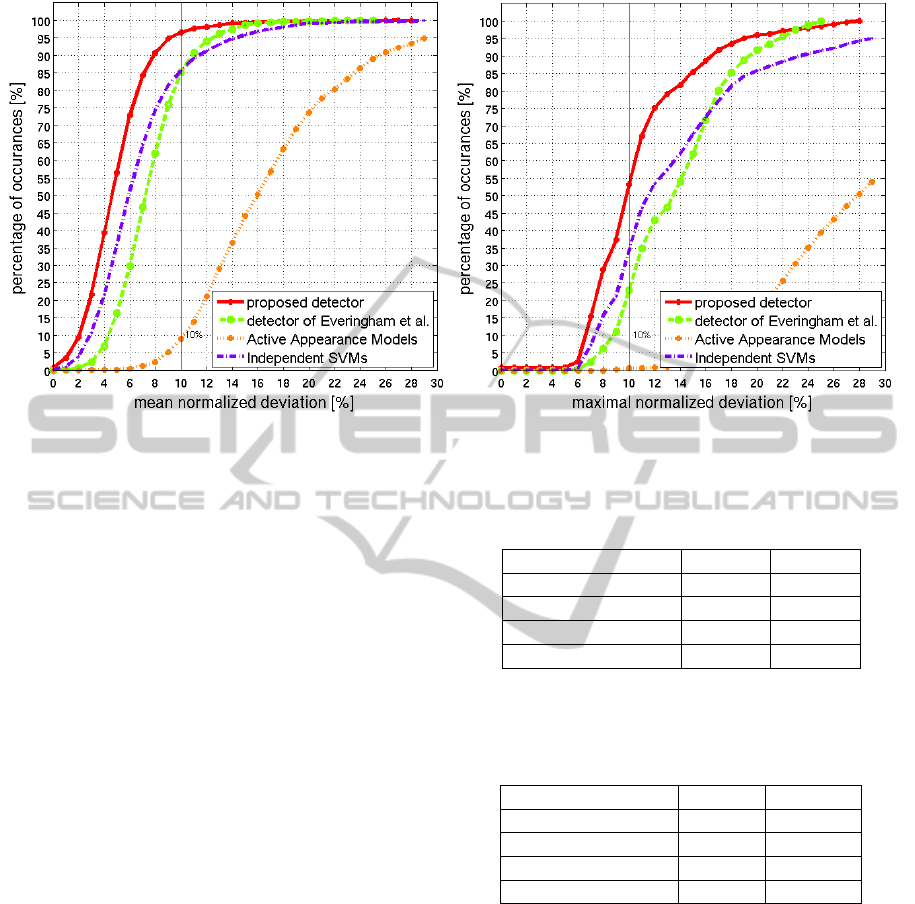
Figure 5: Cumulative histograms for the mean and the maximal normalized deviation shown for all competing detectors.
to the accuracy measure. Surprisingly, the indepen-
dently trained SVM detector is comparable with the
DPM based detector of (Everingham et al., 2008).
The far worst results were obtained for the AAM
based detector which can be attributed to a relatively
low resolution of the input images.
In Figure 5 we show the cumulative histograms of
the mean and maximal normalized deviation. Table 3
shows the percentage of examples from the test part
of the LFW database with the mean/maximal normal-
ized deviation less or equal to 10% (this corresponds
to the line at 10% of x-axis taken from Figure 5. It
is seen that the proposed detector estimates around
97% of images with the mean normalized deviation
less than 10%. This results is far better than was
achieved for all other competing methods. In Fig-
ure 6, we show examples of images with the mean
normalized deviation equal to 10% for better under-
standing of these statistics.
We have also measured the average time required
by the proposed detector to process a single image.
The measurements were done on a notebook with In-
tel Core 2 Duo T9300 2.50 GHz. The average detec-
tion time is 8 ms per image.
4.5 Comparison of BMRM and SGD
In this section, we compare performance of the
BMRM and the SGD algorithm on the problem
emerging when learning the proposed detector. The
task of the solvers is to minimize the problem stated in
(7). Besides the value of the objective function F(w)
of the task (7) we also measured the validation risk
Table 2: Average mean normalized deviation and the av-
erage maximal normalized deviation computed on the test
part of the LFW database.
R
TST
R
max
TST
AAM 17.6042 31.2715
Independent SVMs 7.1970 18.3601
Everingham et al. 7.9975 15.9451
proposed detector 5.4606 12.4080
Table 3: The percentage of images from the test part of the
LFW database where the mean/maximal normalized devia-
tion of the estimated landmark positions was less or equal
to 10%.
Mean Maximal
AAM 8.98% 0.62%
Everingham et al. 85.28% 22.93%
binary SVM 85.66% 34.50%
proposed detector 96.59% 53.23%
R
VAL
(w) being another important criterion character-
izing convergence of the learning algorithm.
To make the iterations of both algorithms compa-
rable, we define one iteration of the SGD as a se-
quence of single update steps equal to the number
of training examples. This makes the computational
time of both solvers approximately proportional to the
number of iterations. The optimal value of parame-
ter t
0
for SGD was selected to minimize the objective
function F(w) computed on 10% of the training ex-
amples after one pass of the SGD algorithm thorough
the data. The parameter t
0
have to be tuned for each
value of λ separately. We fixed the total number of
iterations of the SGD algorithm to 50.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
554

Table 4: Comparison of the BMRM and the SGD. We show the value of primal objective function F(w) and validation risk
R
VAL
for the 50th iteration (assuming termination of SGD after this iteration) as well as for the number of iterations needed
by the BMRM algorithm to find the ε-precise solution.
λ λ = 1 λ = 0.1 λ = 0.01 λ = 0.001
# of iterations 50 106 50 201 50 462 50 1200
BMRM
F(w) 77.48 62.19 45.13 29.68 35.33 14.62 34.35 7.459
R
VAL
(w) 23.24 10.48 9.054 6.067 9.054 5.475 9.054 5.876
SGD
F(w) 50.88 50.44 20.62 20.52 13.72 10.80 12.86 6.309
R
VAL
(w) 9.719 9.627 6.156 6.142 5.577 5.496 5.544 5.818
We run both solver on the problem (7) with the
parameters λ ∈ {0.001,0.01,0.1,1} recording both
F(w) and R
VAL
(w). Results of the experiment are
summarized in Table 4.
It can be seen that the SGD converges quickly at
the beginning and it stalls as it approaches the mini-
mum of the objective F. Similarly for the validation
risk. The optimal value of λ minimizing the validation
error was 0.01 for both SGD and BMRM. The test er-
rors computed for the optimal λ were R
TST
= 5.44
for the SGD and R
TST
= 5.54 for the BMRM, i.e.,
the difference is not negligible. The results for the
SGD could be improved by using more than 50 iter-
ations, however, in that case both algorithms would
require the comparable time. Moreover, without the
reference solution provided by the BMRM one would
not know how to set the optimal number of iterations
for the SGD. We conclude that for the tested prob-
lem the BMRM produced more accurate solution, but
the SGD algorithm was significantly faster. This sug-
gests that the SGD is useful in the cases when using
the precise but slower BMRM algorithm is prohibited.
In the opposite case the BMRM algorithm returning a
solution with the guaranteed optimality certificate is
preferable.
(a) (b)
Figure 6: Sample images where the estimated landmark po-
sitions have the mean normalized deviation equal to 10%.
The green and red points denote the manually annotated and
estimated landmarks, respectively.
5 OPEN-SOURCE LIBRARY AND
LFW ANNOTATION
We provide an open-source library which implements
the proposed DPM detector as well as the BMRM
algorithm for learning its parameters from annotated
examples. The detector itself is implemented in C but
we also provide a MEX interface to MATLAB. The
library comes with several example applications writ-
ten in C, e.g. running the detector on still images or on
a video stream from a web camera. The BMRM algo-
rithm is implemented in MATLAB up to time-critical
operations which are in C. The library is licensed un-
der the GNU/GPL version 3 and it was tested under
GNU/Linux and Windows platform.
In addition, we provide a manual annotation
of the LFW database for non-commercial use.
The following set of landmarks is annotated for
each face: the centers of both eyes, canthi for
both eyes, the tip of the nose, the center of the
mouth and the corners of mouth, i.e. 10 anno-
tated landmarks in total for each image. The li-
brary and the annotation can be downloaded from:
http://cmp.felk.cvut.cz/∼uricamic/flandmark
6 CONCLUSIONS
In this paper, we have formulated the detection of fa-
cial landmarks as an instance of the structured output
classification problem. Our structured output classi-
fier is based on the DPM and its parameters can be
learned from examples by the SO-SVM algorithm.
In contrast to the previous works, the learning objec-
tive is directly related to the accuracy of the result-
ing detector. Experiments on the LFW database show
that the proposed detector consistently outperforms a
baseline independently trained SVM detector and two
public domain detectors based on the AAM and DPM.
We provide an open-source implementa-
tion of the proposed detector and the manual
annotation of facial landmark for the LFW
DETECTOR OF FACIAL LANDMARKS LEARNED BY THE STRUCTURED OUTPUT SVM
555

database. Both can be downloaded from:
http://cmp.felk.cvut.cz/∼uricamic/flandmark
ACKNOWLEDGEMENTS
The first two authors were supported by EC project
FP7-ICT-247525 HUMAVIPS. The second author
was also supported by EC project PERG04-GA-2008-
239455 SEMISOL. The last authors was supported by
the Czech Ministry of Education project 1M0567.
REFERENCES
Beumer, G., Tao, Q., Bazen, A., and Veldhuis, R. (2006).
A landmark paper in face recognition. In 7th In-
ternational Conference on Automatic Face and Ges-
ture Recognition (FGR-2006). IEEE Computer Soci-
ety Press.
Beumer, G. and Veldhuis, R. (2005). On the accuracy of
EERs in face recognition and the importance of re-
liable registration. In 5th IEEE Benelux Signal Pro-
cessing Symposium (SPS-2005), pages 85–88. IEEE
Benelux Signal Processing Chapter.
Bordes, A., Bottou, L., and Gallinari, P. (2009). Sgd-
qn: Careful quasi-newton stochastic gradient descent.
Journal of Machine Learning Research, 10:1737–
1754.
Cootes, T., Edwards, G. J., and Taylor, C. J. (2001). Active
appearance models. IEEE Trans. Pattern Analysis and
Machine Intelligence, 23(6):681–685.
Crandall, D., Felzenszwalb, P., and Huttenlocher, D. (2005).
Spatial priors for part-based recognition using statisti-
cal models. In In CVPR, pages 10–17.
Cristinacce, D. and Cootes, T. (2003). Facial feature de-
tection using adaboost with shape constraints. In
14th Proceedings British Machine Vision Conference
(BMVC-2003), pages 231–240.
Cristinacce, D., Cootes, T., and Scott, I. (2004). A multi-
stage approach to facial feature detection. In 15th
British Machine Vision Conference (BMVC-2004),
pages 277–286.
Erukhimov, V. and Lee, K. (2008). A bottom-up framework
for robust facial feature detection. In 8th IEEE Inter-
national Conference on Automatic Face and Gesture
Recognition (FG2008), pages 1–6.
Everingham, M., Sivic, J., and Zisserman, A. (2006).
“Hello! My name is... Buffy” – automatic naming of
characters in TV video. In Proceedings of the British
Machine Vision Conference.
Everingham, M., Sivic, J., and Zisserman, A. (2008).
Willow project, automatic naming of characters
in tv video. MATLAB implementation, www:
http://www.robots.ox.ac.uk/∼vgg/research/nface/inde
x.html.
Everingham, M., Sivic, J., and Zisserman, A. (2009). Tak-
ing the bite out of automatic naming of characters in
TV video. Image and Vision Computing, 27(5).
Felzenszwalb, P. F., Girshick, R. B., McAllester, D., and
Ramanan, D. (2009). Object detection with discrimi-
natively trained part based models. IEEE Transactions
on Pattern Analysis and Machine Intelligence, 99(1).
Felzenszwalb, P. F. and Huttenlocher, D. P. (2005). Pictorial
structures for object recognition. Internatinal Journal
of Computer Vision, 61:55–79.
Fischler, M. A. and Elschlager, R. A. (1973). The repre-
sentation and matching of pictorial structures. IEEE
Transactions on Computers, C-22(1):67–92.
Franc, V. and Sonnenburg, S. (2010). Libocas —
library implementing ocas solver for training
linear svm classifiers from large-scale data. www:
http://cmp.felk.cvut.cz/ xfrancv/ocas/html/index.html.
Heikkil
¨
a, M., Pietik
¨
ainen, M., and Schmid, C. (2009). De-
scription of interest regions with local binary patterns.
Pattern Recognition, 42(3):425–436.
Huang, G. B., Ramesh, M., Berg, T., and Learned-Miller,
E. (2007). Labeled faces in the wild: A database for
studying face recognition in unconstrained environ-
ments. Technical Report 07-49, University of Mas-
sachusetts, Amherst.
Kroon, D.-J. (2010). Active shape model (ASM) and active
appearance model (AAM). MATLAB Central, www:
http://www.mathworks.com/matlabcentral/fileexchan
ge/26706-active-shape-model-asm-and-active-
appearance-model-aam.
Nordstrøm, M. M., Larsen, M., Sierakowski, J., and
Stegmann, M. B. (2004). The IMM face database - an
annotated dataset of 240 face images. Technical re-
port, Informatics and Mathematical Modelling, Tech-
nical University of Denmark, DTU.
Riopka, T. and Boult, T. (2003). The eyes have it. In
Proceedings of ACM SIGMM Multimedia Biometrics
Methods and Applications Workshop, pages 9–16.
Sivic, J., Everingham, M., and Zisserman, A. (2009). “Who
are you?” – learning person specific classifiers from
video. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition.
Teo, C. H., Vishwanthan, S., Smola, A. J., and Le, Q. V.
(2010). Bundle methods for regularized risk mini-
mization. J. Mach. Learn. Res., 11:311–365.
Tsochantaridis, I., Joachims, T., Hofmann, T., Altun, Y.,
and Singer, Y. (2005). Large margin methods for
structured and interdependent output variables. Jour-
nal of Machine Learning Research, 6:1453–1484.
Viola, P. and Jones, M. (2004). Robust real-time face de-
tection. International Journal of Computer Vision,
57(2):137–154.
Wu, J. and Trivedi, M. (2005). Robust facial landmark de-
tection for intelligent vehicle system. In IEEE Inter-
national Workshop on Analysis and Modeling of Faces
and Gestures.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
556
