
PEOPLE COUNTING WITH STEREO CAMERAS
Two Template-based Solutions
Tim van Oosterhout
1
, Ben Kr
¨
ose
1,2
and Gwenn Englebienne
2
1
University of Applied Sciences of Amsterdam, Amsterdam, The Netherlands
2
University of Amsterdam, Amsterdam, The Netherlands
Keywords:
Stereo Camera, People Counting, Template Projection.
Abstract:
People counting is a challenging task with many applications. We propose a method with a fixed stereo camera
that is based on projecting a template onto the depth image. The method was tested on a challenging outdoor
dataset with good results and runs in real time.
1 INTRODUCTION
For events such as large-scale concerts, fairs and out-
door art festivals, it is important to know the number
of people attending. This number can be inferred if
people are counted at all entrances to the area. Manual
counting is very accurate but is costly since humans
can only perform the counting task for a limited time.
Mechanical solutions such as shaft devices restrict the
throughput and placement may be impractical. Infra-
red sensing devices are only applicable with one per-
son at a time in the passage. Therefore, cameras have
been suggested for automatic counting of people.
Figure 1: Example frame from the (stereo) camera.
This paper focuses on counting of people for an
outdoor event. We developed and compared two
template-based methods for people detection that are
used for counting using stereo cameras. Our method
has the following advantages: (1) It is robust to
changes in lighting. (2) It incorporates prior knowl-
edge about locations where people may walk.
2 RELATED WORK
When using static cameras usually a model of the
background is learned to classify pixels as foreground
or background. A noise-cleaning step is performed to
eliminate too small or short-lived regions. Connected
components of pixels can then be found, resulting in
foreground “blobs”. However, a single person may
give rise to multiple blobs, and parts of multiple peo-
ple can be combined into a single blob because of vi-
sual overlap. In (Bahadori et al., 2007) an approach is
described where the foreground pixels are mapped to
the floor plane where the segmentation is done.
Template-based methods typically model the fore-
ground but not the background. Examples are the
Viola-Jones face detector (Viola and Jones, 2001),
or the use of edge templates for pedestrian detection
(Gavrila, 2000). They have been applied successfully
to a variety of situations, including the tracking of
rigid objects (Nguyen et al., 2001) and segmenting
and tracking humans in crowded scenes (Zhao et al.,
2007). However, such methods typically require very
large training sets (Gavrila, 2000), adapting the tem-
plates to the test data over time (Nguyen et al., 2001)
or extra parameters which need to be optimized.
Our methods takes the best of both worlds. As we
will discuss in section 3, we model the background
404
van Oosterhout T., Kröse B. and Englebienne G..
PEOPLE COUNTING WITH STEREO CAMERAS - Two Template-based Solutions.
DOI: 10.5220/0003865304040408
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 404-408
ISBN: 978-989-8565-04-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
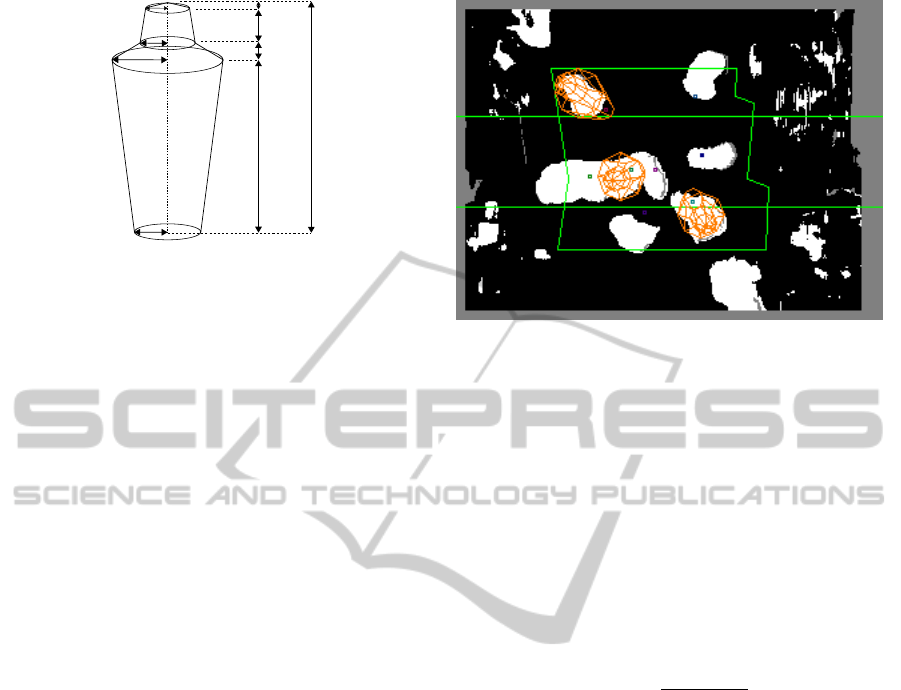
120cm
8cm
17cm
26cm
170cm
24cm
40cm
20cm
16cm
Figure 2: Illustration and dimensions of the template used.
Note that the total width of 80cm might seem large but is
needed to accommodate foreground fattening.
and additionally use the shape of the foreground.
3 METHODS
Our approach uses a stereo camera that looks straight
down and has the volume delimited by the ground
area and about 2 meters above it in view, so that peo-
ple moving through the passage will be fully visible
while they do so. Figure 1 gives a typical frame.
We define a 2.5D range image r for which the
pixel values r
i
are zero on the floor and positive to-
wards the camera. In the first method a 2D foreground
region is extracted from the range image onto which
3D shapes are projected. This method is based on
(Englebienne and Kr
¨
ose, 2010), but now using range
data instead of color images. In the second method
3D shapes are used to reconstruct the 2.5D range im-
age, such that a similarity measure is maximized.
For both methods we use a simplified 3D model of
a human being of average size. The model consists of
several stacked cone segments, which is illustrated in
figure 2. The advantage of not including limbs in the
model is that it makes the model rotationally invari-
ant in the horizontal plane and forgoes the multitude
of poses people could possibly assume at the cost of
leaving small foreground sections unaccounted for.
Using the camera’s intrinsic and extrinsic param-
eters we can project the template at any position. For
both methods we generate hypotheses about the num-
ber and locations of people compare the fit under pro-
jection. By scanning the passage at discrete intervals
we can find and localize any number of people.
3.1 Method 1: Generative Model
We consider the observation vector r, containing the
range image data. Each pixel r
i
is assigned a probabil-
ity that it is foreground p
f
(r
i
) using a dynamic statis-
Figure 3: Three templates have been placed manually for
illustration. The middle template is in between two people
but seems to match well because only the silhouette is pre-
served. The range image (figure 4(a)) provides more detail.
tical background model. We denote the vector of pix-
elwise foreground probabilities as p
f
(r). Similarly,
we use p
b
(r
i
) and p
b
(r) to denote the background
probabilities. We further introduce l to indicate the
location of a person and L = {l
1
. . . l
n
} to indicate a
set of locations corresponding to multiple people.
The quantity we are interested in is the posterior
probability of the people given an observed image,
p(L |r). We compute this using Bayes’ theorem,
p(L |r) =
p(r, L )
∑
L
p(r, L )
, (1)
where p(r, L ) is the joint probability of the observed
image and the locations of the visible people. We de-
tail how this quantity is computed below.
3.1.1 Modelling People’s Locations
In (Englebienne and Kr
¨
ose, 2010) a “mask” vector
m is defined, with the same dimensionality D as the
observed frame, which is a vector whose elements are
one for the components of foreground pixels and zero
otherwise. This allows us to express the probability
of an image, given a mask, as
p(r|m) = m · p
f
(r) + (1 − m) · p
b
(r) (2)
where · indicates the elementwise product and 1 is a
D-dimensional vector containing all ones.
We can project the 3D template of a person in any
location on the ground plane. This is illustrated in
figure 3. We can compute which pixels would belong
to the object resulting in a mask vector m. Because of
our approximations, the mask m
l
depends only on the
position, l = (x, y), of the person on the ground plane.
When more than one person is considered, we take
PEOPLE COUNTING WITH STEREO CAMERAS - Two Template-based Solutions
405
the union of the masks created for each person. The
resulting mask contains all pixels that fall inside the
contours of templates located at the set of locations
L = {l
1
, . . . , l
n
}, and is denoted as m
L
.
We can now express the complete likelihood, ie.
the joint probability of an observed image r and that
a number of people should be present in locations L :
p(r, L ) = p(L ) p(r|L )
= p(L ) [m
L
· p
f
(r) + (1 − m
L
) · p
b
(r)] (3)
Here, p(L ) indicates the prior probability that
there should be n people in the set, and that these peo-
ple are located in the locations L . In (Englebienne
and Kr
¨
ose, 2010) it is explained that this probability
can be factorized in components p(|L|), given the pri-
ors on the number of persons p(l
i
), the location and
the distance between personsp(D(l
i
, l
j
)). In our work
the prior on location was set manually to represent
the regions in which people can appear. In figure 3
this area S is delineated in green. The probability of
locations outside S is 0 and uniform otherwise.
3.1.2 Inferring the Position of Multiple People
We can now infer the probability of a set of person
locations L using Bayes’ rule. However, even a low-
resolution 320× 240 pixel image yields 76800
m
com-
binations of locations for m people. In (Englebienne
and Kr
¨
ose, 2010) it was shown that the search space
can be reduced and that a fast greedy solution can be
applied, similar to the one suggested by (Williams and
Titsias, 2004).
1. Compute p(L =
/
0), ie. no people.
2. Compute and store p(l
i
) for all l
i
∈ S.
3. Find the most likely position of the first person.
4. If this position improves the likelihood, add it to
L , otherwise exit the algorithm.
5. Find the next most likely position. Go to 4.
This algorithm results in the most likely number and
locations of the detected persons.
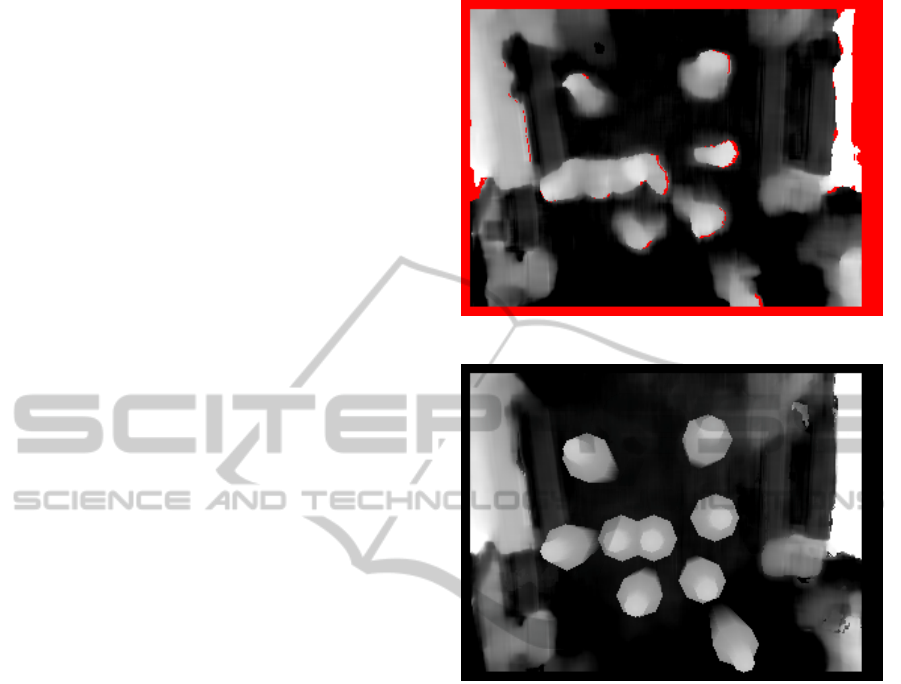
3.2 Method 2: Reconstruction of Range
Image
Again we consider a vector r containing range data.
We construct a range image h and maximize the sim-
ilarity between r and h. The reconstructed image h is
a function of L and the objective is to find the L that
minimizes the distance D(r, h(L )).
(a) The depth image by the stereo camera. Red regions rep-
resent pixels for which no stereo value could be computed.
(b) Adding 2.5D templates to the background to minimise
the difference between the range image and the reconstruc-
tion.
Figure 4: Range image reconstruction.
3.2.1 Modelling People’s Locations
We construct an image h(L ) with range values for
each pixel. We use the same 3D model as in method
1, tessellate it into triangles and render it on a new
image h. Self-occlusion and other occlusion handling
is easy since the calculated values represent distances
to the camera. An example is shown in figure 4.
The method can search for any number of people
by computing the union of templates. We can then
compute the difference between h and the range im-
age r as such:
D(r, h(L )) =
∑
i=1,D
(r
i
− h
i
)
2
(4)
3.2.2 Inferring the Position of Multiple People
We use the same greedy approach as we used in
method 1. To account for the fact that only one person
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
406

can occupy a physical space, an interpersonal distance
s is defined that specifies how close people can be to
one another, and this is used in the selection of loca-
tions l.
1. Compute the h(
/
0), ie., no people.
2. Compute and store D(r, h(L + l)) for each loca-
tion l ∈ S.
3. Find the location m that reduces the distance most:
∀l ∈ S : D(r,h(L +m)) ≤ D(r, h(L + l))
4. If D(r, h(L + m)) < D(r, h(L )), add m to L and
remove locations within the interpersonal distance
s from consideration, otherwise stop.
5. Find the next best position m. Go to 4.
This algorithm results in the number and locations of
the persons such that the distance between the range
image and the reconstructed image is minimal.
3.3 Tracking
The output for each method is the number and loca-
tions of people present in a single video frame. To
establish whether people are entering or leaving the
area of interest these individual observations must be
linked over time. We use a basic tracker that predicts
people’s next locations and smooths the data using a
Kalman filter per person.
4 EXPERIMENTS
The methods were tested on an especially challenging
dataset. The data was recorded in cooperation with a
day long outdoor music festival. Recording started
when the area was opened to visitors and ended after
the last visitor left. In total the video covered about 11
hours and contained over 498.000 frames. The pro-
posed methods’ counts are compared against a manu-
ally created ground truth and additionally against a
simpler method. Using the manual figures, a busy
(Fig. 1) and quiet sequence were selected for com-
parison, in addition to a sequence in bad lighting con-
dition (Fig. 5). The details are described next.
4.1 Alternative Method
The described methods are compared against a na
¨
ıve
method that works on the same range image. This
method creates a foreground mask that depends di-
rectly on the values in the depth map as such:
f
i
=
1 , if g − r
i
> c
0 , otherwise
(5)
Figure 5: At the end of the sequence the lighting conditions
have changed dramatically. Despite this the stereo matching
algorithm is still able to generate decent range images.
with g representing ground level and c a cut-off value
chosen at waist height. In this intersection people will
appear as islands. These are then detected using a
connected component algorithm and tracked.
4.2 Performance
The na
¨
ıve method ran while recording in real-time at
the full capture rate which was set at 25 fps. The gen-
erative and reconstructive methods used the recording
and did stereo processing as well as their own compu-
tation. They ran single threaded on an Intel Core 2
Duo 8400. The reconstruction method was slowest
achieving frame rates varying from 20 fps to 6 fps de-
pending on the amount of people visible.
4.3 Results
Results were collected for people entering and exit-
ing separately. People turning around in view were
discarded, as were tracks for which either the starting
or ending point could not be established. Table 1 lists
the number of people reported per method and per se-
quence. To better compare the individual methods ta-
ble 2 lists the counting error relative to the ground
truth.
5 DISCUSSION
A first striking result is that all methods seem to
undercount. This can be easily explained since the
method specifies a number of constraints on each
track to be counted at all. Overcounting seems harder
PEOPLE COUNTING WITH STEREO CAMERAS - Two Template-based Solutions
407

Table 1: Numeric results per method.
Manual Height Threshold Generative model Reconstruction model
In Out In Out In Out In Out
Entire video 14276 10934 4871 3688 10046 6741 11425 8789
Busy 779 1124 109 230 331 461 557 719
Quiet 417 43 273 23 435 56 446 46
Night 22 597 29 237 15 482 45 549
Table 2: Error percentages per method.
Height Threshold Generative model Reconstruction model
In Out In Out In Out
Entire video -65.9% -66.3% -29.6% -38.3% -20.0% -19.6%
Busy -86.0% -79.5% -57.5% -59.0% -28.5% -36.0%
Quiet -34.5% -46.5% 4.3% 30.2% 7.0% 7.0%
Night 31.8% -60.3% -31.8% -19.3% 104.5% -8.0%
to explain but is seen when people bring in baby car-
riages or when children carry helium filled balloons.
Undercounting is most prominent in the na
¨
ıve
method. The reason is that people do not produce
separate blobs when the cut-off is applied. Rais-
ing the cut-off height will not solve this problem un-
til it is raised to above shoulder height, but at then
short people will be overlooked. Moreover, with fore-
ground fattening (Scharstein and Szeliski, 2002) peo-
ple’s blobs may merge even at head height.
Another remarkable result is the over 100% er-
ror margin of people entering in the night sequence
for the reconstruction method. The only people en-
tering in that sequence are personnell bringing in ob-
jects such as trash bins as illustrated in figure 5 which
match the template close enough.
6 CONCLUSIONS
We have shown two novel template based people
counting and localisation methods that work with
range images by stereo cameras. The methods were
tested on a dataset that featured many people in view
at once, a changing background and big changes in
lighting conditions. We found that as the methods
make more use of the available information from the
range image the detection and tracking results im-
prove. The methods run in real-time, making them
suitable for live deployment.
ACKNOWLEDGEMENTS
The research reported in this paper was supported
by the Foundation Innovation Alliance (SIA - Sticht-
ing Innovatie Alliantie) with funding from the Dutch
Ministry of Education, Culture and Science (OCW),
in the framework of the ‘Mens voor de Lens’ project.
REFERENCES
Bahadori, S., Iocchi, L., Leone, G., Nardi, D., and Scoz-
zafava, L. (2007). Real-time people localization and
tracking through fixed stereo vision. Applied Intelli-
gence, 26(2):83–97.
Englebienne, G. and Kr
¨
ose, B. (2010). Fast bayesian peo-
ple detection. In proceedings of the 22nd benelux AI
conference (BNAIC 2010).
Gavrila, D. (2000). Pedestrian detection from a moving ve-
hicle. Computer VisionECCV 2000, pages 37–49.
Nguyen, H., Worring, M., and Van Den Boomgaard, R.
(2001). Occlusion robust adaptive template tracking.
Computer Vision, IEEE International Conference on,
1:678.
Scharstein, D. and Szeliski, R. (2002). A taxonomy and
evaluation of dense two-frame stereo correspondence
algorithms. International journal of computer vision,
47(1):7–42.
Viola, P. and Jones, M. (2001). Rapid object detection us-
ing a boosted cascade of simple features. Computer
Vision and Pattern Recognition, IEEE Computer So-
ciety Conference on, 1:511.
Williams, C. and Titsias, M. (2004). Greedy learning
of multiple objects in images using robust statis-
tics and factorial learning. Neural Computation,
16(5):10391062.
Zhao, T., Nevatia, R., and Wu, B. (2007). Segmentation
and tracking of multiple humans in crowded environ-
ments. IEEE transactions on pattern analysis and ma-
chine intelligence, pages 1198–1211.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
408
