
REAL-TIME VIDEO MATTING FOR MIXED REALITY
USING DEPTH GENERATED TRIMAPS
Nicholas Beato, Remo Pillat and Charles E. Hughes
Synthetic Reality Lab, University of Central Florida, 3100 Technology Pkwy, Orlando, U.S.A.
Keywords:
Mixed Reality, Image Matting, Natural Image Matting, Real-time, Depth Sensor, Chroma-keying, Trimap
Generation.
Abstract:
In Mixed Reality scenarios, background replacement is a common way to immerse a user in a synthetic en-
vironment. Properly identifying the background pixels in an image or video is a difficult problem known as
matting. Proper alpha mattes usually come from human guidance, special hardware setups, or color dependent
algorithms. This is a consequence of the under-constrained nature of the per pixel alpha blending equation.
While the field of natural image matting has made progress finding a least squares solution for an alpha matte,
the generation of trimaps, indicating regions of known foreground and background pixels, normally requires
human interaction or offline computation. We overcome these limitations by combining a low fidelity depth
image that segments the original video signal with a real-time parallel natural image matting technique that
favors objects with similar colors in the foreground and background. This allows us to provide real-time alpha
mattes for Mixed Reality scenarios that take place in relatively controlled environments. As a consequence,
while monochromatic backdrops (such as green screens or retro-reflective material) aid the algorithm’s accu-
racy, they are not an explicit requirement.
1 INTRODUCTION
In Mixed Reality scenarios, the desired experience of-
ten requires graphically immersing a user in a virtual
environment. This blend of real and synthetic ob-
jects is usually done by capturing a video either of the
user or from the perspective of the user, processing
the video to identify which real objects should appear
on top of the virtual background, and layering fore-
ground computer graphics if necessary. The process
of isolating the real objects is known as matting.
Alpha matting produces a value,
α
, for each pixel,
I, in an image that may be used to composite a fore-
ground image on a background. This is done by the
alpha blending equation,
I =
α
F + (1−
α
)B, (1)
where I is the observed color, F is the foreground
color, and B is the background color. Note that
α
is
0 when the foreground is completely transparent and
1 when it is completely opaque. This results in three
equations with seven unknowns (F, B, and
α
). The
only known is I, the observed video pixel. This in-
herently makes the problem under-constrained (Smith
and Blinn, 1996).
To overcome this restriction, matting is typically
done with a constant color background, such as a blue
screen or a green screen. This process is known as
chroma-keying and requires some prior knowledge of
the background color (acquired either algorithmically
or through offline training). When the constant color
constraint is relaxed to include real environments, the
method is referred to as natural image matting. To
date, most natural image solutions require human in-
put in the form of trimaps or scribbles as known fore-
ground and background constraints to account for the
lack of prior knowledge in the scene.
Automating the generation of trimaps for video
sequences can be done with special hardware setups.
This involves modifying an existing camera system
(Gvili et al., 2003; McGuire et al., 2006) or adding
multiple sensors (Wang et al., 2007; Joshi et al.,
2006). The use of a depth camera has become more
practical and affordable with the introduction of the
Microsoft Kinect (Microsoft, 2011).
For Mixed Reality applications, an ideal real-time
matting solution allows for dynamic camera motion,
is tolerant to environmental changes (such as light-
ing), and works in environments that may not contain
constant color backgrounds. In addition, the chosen
280
Beato N., Pillat R. and E. Hughes C..
REAL-TIME VIDEO MATTING FOR MIXED REALITY USING DEPTH GENERATED TRIMAPS.
DOI: 10.5220/0003870402800288
In Proceedings of the International Conference on Computer Graphics Theory and Applications (GRAPP-2012), pages 280-288
ISBN: 978-989-8565-02-0
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
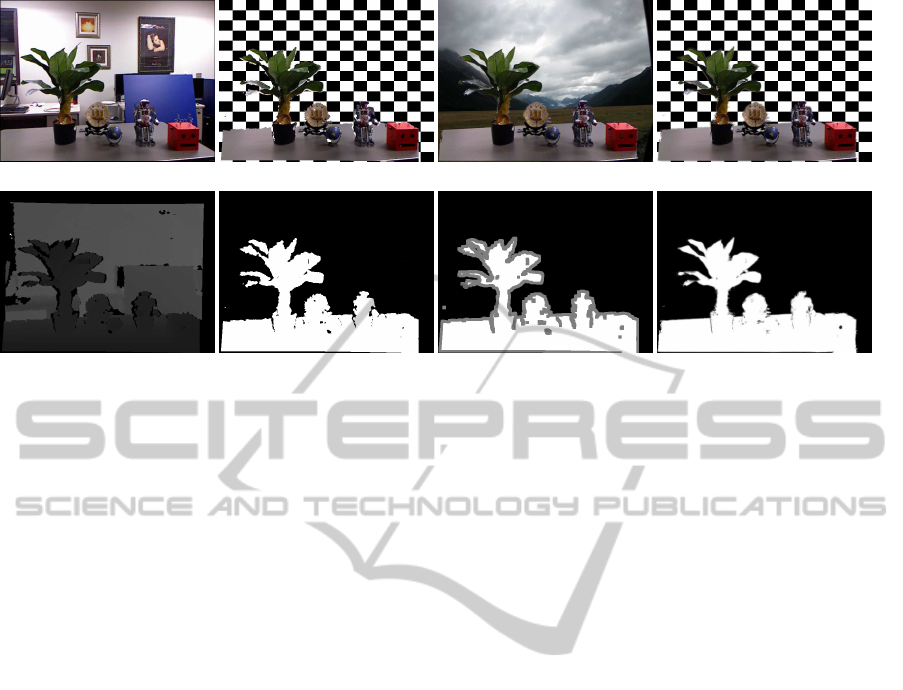
(a) (b) (c) (d)
(e) (f) (g) (h)
Figure 1: Demonstration of the steps in the matting process using a Microsoft Kinect. The input is the color image (a) and
depth image (e). A depth threshold is applied to create a segmented image (f), which is both eroded and dilated to create a
trimap (g). A natural image matter solves the alpha matte (h), which is used to composite against a different background (c)
& (d). Using the segmented image alone produces noticeable artifacts during compositing (b). The entire process takes about
5.588 ms at 640x480 on a GTX580 (including transferring images to the GPU).
matting technique should exploit the temporal infor-
mation gained from a live video stream.
Selecting a natural image matting technique
would be ideal, but the generation of trimaps in dy-
namic scenarios poses a difficulty. To address this,
we consider exterior data as in (Gvili et al., 2003;
Wang et al., 2007). Our observation is that given a
low cost depth camera, such as a Microsoft Kinect,
it is possible to obtain a trimap from a 3D scene in
real-time (Wang et al., 2007). It is then possible to
execute a natural image matting solver in real-time on
a live video, given the trimap (Gastal and Oliveira,
2010). By combining these two approaches and run-
ning them on a commodity GPU, it is possible to per-
form believable alpha matting on live videos in real-
time. This allows us to simplify the Mixed Reality
chroma-key setup, as no priors are required, and to
relax background constraints for Mixed Reality expe-
riences that require alpha matting.
2 RELATED WORK
While alpha matting is under-constrained, exact so-
lutions may be computed if the foreground object
is captured against multiple backgrounds (Smith and
Blinn, 1996). Solutions that take advantage of this
require quickly changing exposure times (Sun et al.,
2006), use multiple cameras (Joshi et al., 2006), depth
images (Gvili et al., 2003), or other special hardware
(McGuire et al., 2006). These solutions may pose
problems in generic Mixed Reality environments. For
example, adjusting the shutter speed of a camera may
not be possible if objects are moving in the scene.
Modifying existing cameras is usually not practi-
cal for off-the-shelf devices, e.g., video see-through
HMDs with built-in cameras or smart phones.
Using a constant background color enables the
calculation of approximate alpha mattes using the
color as a prior. This is commonly known as con-
stant color matting, or chroma-keying. Solutions ex-
ist using color volumes (Bergh and Lalioti, 1999;
Mishima, 1992; Beato et al., 2009) or specialized al-
gorithms based on heuristics (Vlahos, 1978). While
these methods run in real-time, they require train-
ing a model on the likely background color or hand-
tuning parameters for optimal perception. Further-
more, these methods fail if the perceived color of the
background varies due to illumination changes in the
scene (such as lights dimming or flashing) or automat-
ically adjusting exposure parameters of the cameras.
Natural image matting techniques tend to fall into
global least squares approximations or sample based
solutions. Global solutions such as (Levin et al.,
2006; Levin et al., 2008; Shi and Malik, 2000) con-
sider expensive processing of an nxn weight matrix,
where n is the number of pixels in the image. Paral-
lelizing a local minimizer to the matting linear sys-
tem may be done via gradient descent or the conju-
gate gradient method (Gvili et al., 2003; Beato et al.,
2009; Gastal and Oliveira, 2010). For these solutions
to work well, the weight matrix must use global color
REAL-TIME VIDEO MATTING FOR MIXED REALITY USING DEPTH GENERATED TRIMAPS
281

assumptions. In the case of the matting Laplacian, re-
sults in (Gastal and Oliveira, 2010) indicate that this
approach, when used as an optimizer on an approxi-
mate solution, does not currently run in real-time.
For sample-based natural image solutions, the
possible foreground and background candidates are
assumed to span the known image regions and pre-
viously solved pixels (Gastal and Oliveira, 2010;
Chuang et al., 2001; Ruzon and Tomasi, 2000; Wang
and Cohen, 2007). These solutions work well when
the unknown region is relatively small and contains
known pixel colors. However, these methods do not
address howto automatically generate known regions.
An exception is (Gastal and Oliveira, 2010), which
explored using Gaussian Mixture Models to model
the color of a foreground object. This solution has the
same pitfall as chroma-key solutions, in that changes
in the color perception due to illumination may cause
the trained model to improperly classify pixels.
(Levin et al., 2008) shows promise in automati-
cally identifying an alpha matte for images without a
trimap. However, this algorithm requires solving the
smallest eigenvectors of the matting Laplacian, which
is computationally expensive due to its large size.
In (Gvili et al., 2003; Wang et al., 2007), a depth
camera is used to slice the scene, creating a trimap in
real-time. While (Gvili et al., 2003) mattes in real-
time, it uses a modified camera that adjusts the shut-
ter speed for time-of-flight depth calculations. This
may not be applicable for Mixed Reality scenarios.
Also, their natural image optimization uses a custom
weighted box filter to blur the alpha matte instead
of minimizing the error. Solutions that use external
depth cameras (Pitie and and Kokaram, 2010; Wang
et al., 2007) are able to calculate a depth matte in real-
time, but do not attempt to solve the natural image
matting aspect of the problem in real-time.
3 REAL-TIME ALPHA MATTING
FOR MIXED REALITY
Creating an alpha matte in real-time is accomplished
by utilizing the parallelism of a modern GPU. We
move the captured depth map (Figure 1e) and color
image (Figure 1a) to the GPU as quickly as possible
and process all data in parallel using localized algo-
rithms. After the initial transfer, the algorithm in-
volves two main stages as described in (Wang et al.,
2007). First, we create a trimap from the depth cap-
ture. Then we apply a natural image matting solver.
We stress that the general algorithm to solve this prob-
lem exists as well as the algorithms solving each re-
spective subproblem. We wish to illustrate that com-
bining real-time versions of the subproblems allows
immediate visual feedback of the matting process,
creating new opportunities for Mixed Reality appli-
cations.
3.1 Trimap Generation
To generate trimaps, we follow a few steps outlined in
(Wang et al., 2007). We reiterate them here for clarity.
The pixel coordinates of the perceived depth im-
age are back-projected into 3D space and then repro-
jected into the image coordinate frame of the color
camera. It is assumed that the color camera has a fixed
rotational and translational offset to the depth camera
and that the their respective intrinsic camera parame-
ters are known. This reprojection process is indepen-
dent of the camera resolutions and handles any rela-
tive pose of the cameras. Note that excessive offsets
or resolution differences will result in gaps in the new
depth image that have to be handled by the algorithm.
Any small gaps in the reprojected depth image are al-
leviated by applying a morphologicalclosing operator
as a final processing step.
Note that in this research we do not explicitly ad-
dress latency between the two cameras, despite ob-
serving it. The exposure of the color and depth images
is not synchronized and this could lead to a temporal
offset of up to 17 ms (assuming no capture latency).
This offset causes misalignments during motion of the
cameras or the foreground objects. We rely on these
motion artifacts being treated as unknown regions in
the trimap and thus resolved by our image matting so-
lution.
Once we have the depth image scaled and in cor-
rect coordinates, we apply a depth threshold. This
depth threshold could be per pixel, but we choose a
global cutoff as done in (Wang et al., 2007). The
thresholded image is a black and white image, which
is then both dilated and eroded (with a radius of 4) to
create unknown regions along the borders (approxi-
mately 8 pixels wide). This radius is configurable, but
we find a radius of 4 is a good value to cover align-
ment issues in the images, while protecting thin re-
gions of foreground pixels from becoming completely
unknown.
In certain circumstances, pixels in the depth map
will have unknown values. While it makes sense to
assign these to the unknown region, we found that
most of these pixels are caused by background ob-
jects that are either far away from the depth sensor or
do not reflect infrared well. Most foreground objects
(non-glass) in our tests do not exhibit these problems
and thus are well-defined in the depth image. As a
result, pixels with unknown depth are assigned max-
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
282

imum depth. We note that this could be problem-
atic when the unknown depth is caused from occlu-
sion shadowing due to the projective transformations.
From our observations, this issue is normally resolved
by the morphological processing.
3.2 Natural Image Matting
When a video frame and its associated trimap are
available, we want to solve the matte in real-time in
order to use the result for Mixed Reality. In (Wang
et al., 2007), the processing considered a depth modi-
fication to the Bayesian and Poisson matting systems.
While their findings show that a Z-Cam improves the
processing time, they do not achieve real-time speeds.
We instead investigate using the Shared Sampling al-
gorithm (Gastal and Oliveira, 2010). It is real-time,
requires minimal, if any, parameter tuning, and works
on GPU hardware.
For completeness, we outline the major stages of
this algorithm, but refer the reader to (Gastal and
Oliveira, 2010) for details. The Shared Sampling al-
gorithm works in three stages. In the gathering stage,
each pixel traces four rays in image space using a
rotated cross configuration. Each pixel rotates the
configuration slightly differently. Each ray returns
at most one known foreground and one known back-
ground color. Out of the four possible foreground and
background colors, the result with the lowest error is
saved as a candidate foreground/background pair.
The next stage refines candidate choices within
a neighborhood. The k
r
nearest gathered samples
are checked against an error function, where the
best three samples are averaged. The original paper
found k
r
to perform well at about 200 samples. This
stage allows the different orientations to vote fore-
ground/background pairs from the different cross ori-
entations. The averaged pair is used to compute a
candidate alpha and confidence metric for the current
pixel. We want to stress that the re-use of gathered
candidates across multiple pixels is the feature of this
algorithm that enables real-time processing.
The smoothing stage then computes a low fre-
quency alpha matte using the high confidence alpha
values using the nearest m samples. The authors
found a decent smoothing size when m was about 100
pixels. During this stage, an adjusted confidence is
computed. Given the high frequency alpha and the
low frequency alpha, the adjusted confidence is used
to interpolate the final alpha result. A result with high
confidence will more likely use the high frequency al-
pha, whereas the lower confidence results will use the
low frequency alpha.
4 SHARED SAMPLING
MODIFICATIONS
While the Shared Sampling algorithm works in real-
time, we made some algorithmic modifications to al-
low better performance in Mixed Reality scenes. We
specifically addressed how the algorithm combines
pixels’ data during local searches, how the approx-
imate foreground and background colors are com-
puted, and how to make the algorithm more tolerant
to video data.
4.1 Window-based Neighborhoods
First, we replaced the “nearest samples” idea with a
kernel based approach. This allows us to sum over
windows in the image instead of performing a “spi-
ral search” looking for a specific number of the near-
est pixels. We chose to use a 13x13 window during
the sample refinement, as it includes nearly 200 pixels
and is an odd sized window (and therefore centered).
For the smoothing stage, we chose a 9x9 window for
similar reasons (includes nearly 100 pixels). We note
that we skip data from known regions during the sum-
mation, so we might underestimate the window size.
We do not think this should affect performance.
4.2 Gathering using Weighted Sums
The Shared Sampling refinement stage runs by find-
ing the best three pairs of candidate foreground and
background samples within a neighborhood and aver-
aging their values. Efficiently implementing this on
a GPU is not a trivial task. This is because keeping
track of the top three data elements requires signif-
icant branching within a warp on the GPU. When a
single pixel needs to insert a new value, other data
elements need to process the same instructions (and
vice versa). Additionally, we need more registers
to store local information for the top three candi-
dates. To completely bypass these concerns, we in-
stead choose to calculate a weighted sum on pixel,
p, using its inclusive neighbors, q ∈ N[p], by looking
back to Bayesian Matting (Chuang et al., 2001),
P(F
p
,B
p
,
˜
α
|I
p
) =
P(I
p
|F
p
,B
p
,
˜
α
)P(F
p
)P(B
p
)P(
˜
α
)
P(I
p
)
,
(2)
where F
p
is a potential foreground color for a pixel
I
p
, B
p
is a potential background color, and
˜
α
is the
estimated alpha given I
p
, F
p
, and B
p
,
˜
α
(I
p
,F
p
,B
p
) =
(I
p
− B
p
) · (F
p
− B
p
)
||F
p
− B
p
||
2
. (3)
REAL-TIME VIDEO MATTING FOR MIXED REALITY USING DEPTH GENERATED TRIMAPS
283

In other words,
˜
α
is indicative of the closest point to
I
p
on the line through F
p
and B
p
. Note that these val-
ues are not necessarily dependent on the same pixel
location, p.
In their work, the authors of (Chuang et al., 2001)
assume P(I
p
) is independent of the optimization and
that P(
˜
α
) is constant. We instead assume P(I
p
) is
constant without priors and that P(
˜
α
) should favor
foreground or background selections (unless the im-
age is highly transparent). For simplicity, we also
assume that both the sampled foreground and back-
ground colors occur at equal rates, making P(F
p
) and
P(B
p
) constants. While this assumption seems false
due to the fact that colors occur in different frequen-
cies, our experiments show that it is not too detrimen-
tal. We also want to note that in a scene that favors
chroma-key techniques, we could specify a function
for P(B
p
) using a Gaussian Mixture Model or similar
technique. By replacing these constants in the origi-
nal formula, we see that the probability of the param-
eters given the observed pixel is proportional to the
product of the probability of an observed pixel given
the parameters and the probability of observing alpha,
P(F
q
,B
q
,
˜
α
|I
p
) = P(I
p
|F
q
,B
q
,
˜
α
)P(
˜
α
)P
k
, (4)
where P
k
= P(F
p
)P(B
p
)/P(I
p
) and is constant across
the image for known foreground/background pairs.
If we know the probability that a candidate pair
is a good choice, we can compute a probabilistic
weighted sum of gathered candidate pairs. We choose
to do this over averaging the 3 best solutions accord-
ing to color line distance as in (Gastal and Oliveira,
2010),
F
r
p
=
∑
q∈N[p]
P(F
q
,B
q
,
˜
α
|I
p
)F
q
∑
q∈N[p]
P(F
q
,B
q
,
˜
α
|I
p
)
=
∑
q∈N[p]
P(I
p
|F
q
,B
q
,
˜
α
)P(
˜
α
)F
q
∑
q∈N[p]
P(I
p
|F
q
,B
q
,
˜
α
)P(
˜
α
)
,
and similarly,
B
r
p
=
∑
q∈N[p]
P(I
p
|F
q
,B
q
,
˜
α
)P(
˜
α
)B
q
∑
q∈N[p]
P(I
p
|F
q
,B
q
,
˜
α
)P(
˜
α
)
.
For clarity, we define the probability as done
in (Chuang et al., 2001). Given a fixed candi-
date foreground/background pair known to exist, we
can calculate the probability that the pair correctly
solves alpha for a given color by considering a nor-
mal distribution around the line connecting the fore-
ground/background pair,
P(I
p
|F
p
,B
p
,
˜
α
p
) = exp(− ||I
p
−
˜
I
p
||
2
/2
σ
2
C
), (5)
where
˜
I
p
=
˜
α
p
F
p
+ (1−
˜
α
p
)B
p
.
σ
C
is the number of
standard deviations of the normal distribution around
the line and we have fixed this value to 5 using a [0,
255] RGB cube.
For P(
˜
α
), we choose to estimate the transparent
probability using a Gaussian centered on 0.5 with
a tunable parameter for the “width” of the function.
This causes the gather stage to favor alpha solutions
near 0 or 1 while avoiding 0.5.
P(
˜
α
) = 1.0 − exp(−(
˜
α
− 0.5)
2
/2
σ
˜
α
), (6)
σ
˜
α
is the tunable parameter to control the biasing to-
wards non-transparent solutions. We set this to 45 to
produce a more uniform-like distribution that still bi-
ases away from transparent. In the case of fixed im-
ages with high-transparency,we can just set this equa-
tion to a uniform constant.
4.3 Smoothing Refined Samples
We noticed that, in videos, discontinuity in the
trimap can cause large fluctuations to the refined fore-
ground/background pair. We believe this contributes
to a lot of the temporal noise that occurs on object
boundaries during the matting process. To alleviate
some of the noise in the foreground / background im-
ages, we perform a bilateral filter on the refined im-
ages and recompute the alpha and confidence from
the filtered results. Alpha is computed as described in
Equation (3). We choose to compute the confidence
with P(I
p
|F
q
,B
q
,
˜
α
)P(
˜
α
) on the smoothed refinement
pairs. For comparison, (Gastal and Oliveira, 2010)
computes the confidence with only P(I
p
|F
q
,B
q
,
˜
α
) on
the non-smoothed pairs. This allows us to use sam-
ples more similar to the low frequency object colors
in the scene. Since Mixed Reality environments typ-
ically do not have transparent objects and are fairly
controlled scenes, we think using the filtered image is
a fair trade-off.
4.4 Video Processing
We note that the Shared Sampling algorithm, while
targeting real-time, does not add any type of temporal
information during processing. As a result, the solu-
tions can vary across frames, especially along object
boundaries. This is especially true when the trimaps
are not consistent across frames, which is a preva-
lent issue with depth sensors. We decided to address
this by modifying the Shared Sampling algorithm for
video processing.
We choose to extend the refinement stage and the
newly added smoothing stage to a 3D process to in-
clude temporal information. Both modifications re-
quire summing over a 3D neighborhood of pixels
(where the third dimension indicates previous frames
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
284

that are already gathered or refined). These changes
cause the kernels to execute in cubic time instead of
quadratic time, which causes performance issues on
less powerful systems. However, we only need to run
these filters on pixels that are currently unknown in
the trimap. As a result, the alpha estimates are com-
puted from temporally smoothed foreground / back-
ground pairs.
5 EXPERIMENTS
We group our experiments into a several categories.
First, we want to show that our modifications to the
Shared Matting system are not detrimental to the
overall performance or accuracy. Then, we want to
demonstratethat our modifications benefit the matting
in an example Mixed Reality application. Finally, we
want to show that we do not require training a model
on priors and that we are robust to changes in camera
position, background, and illumination.
To test that our changes do not significantly hurt
the results or performance, we benchmark our im-
plementation of the Shared Matting algorithm with
and without our refinement stage adjustment and
our filtering stage against the training dataset on
www.alphamatting.com (Rhemann et al., 2009). Our
implementation uses Nvidia’s CUDA 4.0 API with-
out shared memory compiled with 1.1 compatibility.
Timing is done with hardware timers in the CUDA
API. We mainly want to observe that the accuracy of
the algorithm is not adversely affected, but we are also
interested in performance gains.
In order to test our video modifications to the
Shared Matting algorithm, we captured two videos
with a green screen background. We used Adobe
R
Premiere
R
to find an acceptable alpha matte for the
video sequences. These alpha mattes will be treated
as ground truth. We made this choice because we are
not aware of a data set for ground truth video matting
data. The temporal modifications presented in Sec-
tion 4.4 will be compared with the unmodified ver-
sions using the chroma-keyed ground truth.
To show that our algorithm works in a Mixed Re-
ality setting, we process the frames in two distinct
videos. As mentioned, one video is taken against a
green screen background to allow us to compare our
matting results to a known ground truth. The second
video has camera motion, background changes, and
illumination changes to test robustness to dynamic
scenes. To show the flexibility of our algorithm the
videos are taken with two different color cameras. In
the first video, the color images are captured using
a camera rigidly mounted underneath the Microsoft
Kinect. For this experiment we use a web cam with
1280x720 pixel resolution. The intrinsic and extrinsic
camera parameters of this two-camera system are ex-
tracted through standard calibration methods and the
depth image is reprojected according to the process
outlined in Section 3.1. This remapping process is
handled offline for each video frame, but could easily
be implemented on the GPU for online processing.
The second video was captured using the Kinect’s
built-in color camera (at 640x480 pixel resolution). In
this case, the re-mapping of the depth image happens
in real-time, so no offline processing is necessary. We
use the OpenNI drivers to access the raw depth infor-
mation of the Kinect depth camera.
Note that we could use other features of OpenNI,
such as the segmentation image, but we are more in-
terested in the generic depth map solution. We note
that the only parameter we adjusted is the distance
of the depth slice. We intentionally keep the back-
ground farther away from the foreground to demon-
strate proof of concept. Our goal is to informally
demonstrate that this type of approach works for
Mixed Reality applications.
6 RESULTS
For our first test, we observe that the overall error,
both mean squared error (MSE) and sum of abso-
lute difference (SAD), slightly increases with our re-
finement modification and becomes worse due to our
smoothing stage (see columns 2 and 3 in Table 1). We
note that the smoothing stage does not have this hin-
drance during video tests. Upon further inspection,
we see that this is isolated to two (out of 27) images
that are considerably worse, while one image is con-
siderably better. On the remaining images, the refine-
ment stage does not seem to affect accuracy.
In terms of performance, we benchmarked on an
Nvidia GTX 580 and mobile GTS 360M. We see
that the older mobile GPU gains an average 1.8x per-
formance increase with this refinement modification.
The algorithm modification runs an average 1.25x
faster than the unmodified version on a modern GTX
580. For real-time applications, this is a significant
savings, especially in the case of the mobile GPU,
which achieves real-time processing rates in excess of
30 Hz through our modifications. The added filtering
stage still executes quicker than the initial algorithm,
but the results are slightly worse in this test (see col-
umn 4 in Table 1).
For our second test, we captured a 410-frame
video sequence with a resolution of 1280x720 pixel
in a green screen area. An example frame is shown
REAL-TIME VIDEO MATTING FOR MIXED REALITY USING DEPTH GENERATED TRIMAPS
285

(a) (b) (c)
(d) (e) (f)
Figure 2: Subfigures (a) and (d) show selected color frames from two of our video sequences. The calculated alpha mattes are
pictured in (b) and (e). (c) and (f) exhibit the results with replaced backgrounds. Note that the missing left sides in (e) and (f)
are not due to an error in the algorithm but result from the different aspect ratios of the color and depth cameras. Image (a) is
a selected frame from the second experiment.
Table 1: Comparison of the original implementation with
our modified gathering stage and additional filtering stage.
The first two rows show the average MSE and SAD on
the www.alphamatting.com low resolution training set. The
performance sections show the algorithmic run-time (with-
out transfer) on a new GTX580 and an older mobile GTS
360M. We see that the refinement stage modification gives
a noticeable performance boost, especially on the mobile
GPU. The additional filtering stage does appear to give bet-
ter results and is comparable to the original implementation.
Shared Matting Modified Filtered
Error
Average MSE 0.0040 0.0043 0.0050
Average SAD (x10
3
) 5.6767 5.8914 6.2267
Performance GTX 580
Average Time (ms) 7.9883 6.2100 7.7904
Best Time (ms) 3.0676 2.9653 3.7409
Worst Time (ms) 20.1341 12.9217 16.2894
Performance GTS 360M
Average Time (ms) 43.3870 24.6122 33.3804
Best Time (ms) 18.5876 13.6247 17.6396
Worst Time (ms) 101.8040 46.9460 65.6575
in Figure 2a. The uniform background allowed us
to generate a ground truth alpha matte for a realis-
tic video sequence using the chroma-keying capabil-
ities of Adobe
R
Premiere
R
. The results confirm our
first test. Our modified implementation produces the
same MSE as the original algorithm (0.0146for both).
However, it still exhibits a faster run-time (54.3 ms
vs. 58.7 ms on average) using a Nvidia GTX 280. We
want to note that the overall performance improve-
ment is not as dramatic as in the first test. We suspect
that this is because the unknown region is relatively
small in comparison to the green screen background.
As a result, the GPU is pruning the solver more than
refining and smoothing the results. Figure 2d shows
a frame from a different video taken with the same
camera.
To test the temporal modifications from Sec-
tion 4.4, our second green screen video was keyed
using a varying number of previous frames during
processing. As a base line with independent frame-
by-frame processing, our algorithms yields an aver-
age run-time of 97.28 ms and an average MSE of
0.00762on this sequence (using a GTX 280). Increas-
ing the frame number in the smoothing stage from 1
to 5 lengthens the average run-time to 163.83 ms, but
the average MSE grows slightly worse to 0.00768. In
separate runs we varied the frame window for the re-
finement stage from 1 to 5. The average MSE shows
the slightest improvement with 0.007568, but there is
a big run-time penalty with an average of 221.02 ms.
Unfortunately, we did not see any performance
benefits in the temporal modifications and disabled
them for all further tests. Our insight into this issue
is that the Shared Sampling matter produces better re-
sults when the foreground and background samples
are more representative of a good alpha. Temporally
smoothing alpha with the foreground and background
of many frames may in fact weaken the estimate al-
pha due to less specific information for that frame. We
suspect this is also why a relatively small window size
performs well during the smoothing stage. Even if the
results were better, the increased run-time pushes us
away from a real-time solution. This raises an issue
worth addressing when using the Shared Sampling al-
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
286

gorithm for video processing, both on-line and off-
line.
In our third test, we captured and processed a live
video with the built-in Kinect color and depth cam-
eras. Figure 3 shows frames with a resolution of
640x480 pixel from that video. Table 2 illustrates
that the video is indeed processed fast enough to use
in Mixed Reality scenarios. Our algorithm (naively
implemented) only requires about 10 RGBA textures
(of similar size to the input) depending on input and
output usage. Textures could potentially be reused,
but we avoided this for debugging. For temporal im-
plementations, we needed to add four cache textures
per frame. This leaves plenty of resources (both GPU
memory and processor time) for rendering.
The second and third tests reveal artifacts due to
darker regions in the image. This is expected as the
Shared Matting algorithm requires finding good can-
didate colors early during the gathering stage. Other
artifacts occur due to the offset between the depth and
color cameras that can lead to pronounced shadowing
effects.
We also observe some graininess in the alpha
matte which we believe is due to the camera noise. As
mentioned in (Wang et al., 2007), the floor causes an
issue since the segmentation is based on a fixed-plane
depth cutoff. Overall, we are excited to see that the al-
gorithm works well with dimming lights and lack of
chroma-key backgrounds, which is illustrated in Fig-
ure 3a-b.
(a) (b) (c)
Figure 3: Three frames from a video sequence with a mov-
ing camera processed in real-time. The video starts with
fully lit scene (a). By frame (b), the lights in the immediate
foreground are dimmed (not near the green screen). By the
end of the video, the blue curtain is pulled away (c).
Table 2: An example 640x480 video is processed (over 450
frames) in real-time. Selected frames appear in Figure 3.
GPU Average Time (ms) Best Time (ms) Worst Time (ms)
GTX 580 5.8132 4.1721 7.0529
GTS 360M 20.8613 12.9881 26.4724
7 CONCLUSIONS AND FUTURE
WORK
We present an approach that combines real-time algo-
rithms for trimap generation and natural image mat-
ting in order to compute the alpha channel in a live
video. To achieve this, we presented adjustments to
the Shared Sampling algorithm (Gastal and Oliveira,
2010), notably modifications to allow more efficient
sample refinement. The adjustments achieve a no-
ticeable speedup in experiments on images with dif-
ferent resolutions. This result is directly applicable
to a multitude of Mixed Reality applications and a
proof-of-concept implementation was demonstrated
leaving plenty of GPU resources for rendering com-
plete Mixed Reality scenes. Our method is resilient
to illumination and background changes compared to
approaches that use priors, places no constraints on
camera movements, and requires only a readily avail-
able and affordable depth sensor. While we note that
our attempt to obtain temporally consistent alpha mat-
tes in the context of a video have not been fulfilled,
we point out that, to our knowledge, this is the first
implementation of natural image matting with auto-
matic trimap generation that is able to process a video
stream in real-time using only consumer-level hard-
ware.
As noted in (Wang et al., 2007), the choice of a
constant depth slice is problematic when the back-
ground and foreground interact. This problem could
probably be alleviated for some common cases, e.g.
for a floor or a ceiling by pre-segmenting the depth
map and identifying constant planar features. We also
note that the lack of a dataset with accurate ground-
truth depth images makes it difficult to compare our
results to other depth-map based matting approaches.
Generating such a benchmark dataset will be one fo-
cus of our future activities. In additional future work,
we would like to exploit the additional depth infor-
mation in the image matting stage. Right now, the
depth image is only used to automatically generate
the trimap for the image matting algorithm, but it
seems plausible that depth information could be in-
corporated in the algorithm itself. Intuitively, objects
in the captured depth map should be locally smooth.
This implies that the depth image moves between con-
REAL-TIME VIDEO MATTING FOR MIXED REALITY USING DEPTH GENERATED TRIMAPS
287

tinuous objects when the second derivative in pixel
space is non-zero. Using this intuition it should be
possible to improvethe matting results of our method.
Finally, we would still like to find a way to make the
Shared Sampling algorithm more resilient to trimap
noise in videos. Our attempt to add some tempo-
ral consistency did not show ground-breaking results.
We believe that better usage of multiple frames is a
key problem to address if the Shared Sampling al-
gorithm should ever be applied in a Mixed Reality
system. An alternative approach would be to sub-
sequently smooth the alpha values across multiple
frames.
ACKNOWLEDGEMENTS
This material is based in part upon work supported by
the National Science Foundation under Grant Num-
bers DRL0840297, DRL1113621 and CNS1051067.
Any opinions, findings, and conclusions or recom-
mendations expressed in this material are those of the
authors and do not necessarily reflect the views of the
National Science Foundation.
REFERENCES
Beato, N., Zhang, Y., Colbert, M., Yamazawa, K., and
Hughes, C. E. (2009). Interactive chroma keying
for mixed reality. Comput. Animat. Virtual Worlds,
20:405–415.
Bergh, F. V. D. and Lalioti, V. (1999). Software chroma
keying in an immersive virtual environment. South
African Computer Journal, 24:155–162.
Chuang, Y.-Y., Curless, B., Salesin, D. H., and Szeliski, R.
(2001). A bayesian approach to digital matting. In
Proceedings of IEEE CVPR 2001, volume 2, pages
264–271. IEEE Computer Society.
Gastal, E. S. L. and Oliveira, M. M. (2010). Shared sam-
pling for real-time alpha matting. Computer Graphics
Forum, 29(2):575–584. Proceedings of Eurographics.
Gvili, R., Kaplan, A., Ofek, E., Yahav, Giora, ., and Benton,
S. A. (2003). Depth keying. Stereoscopic Displays
and Virtual Reality Systems X, 5006:564–574.
Joshi, N., Matusik, W., and Avidan, S. (2006). Natu-
ral video matting using camera arrays. ACM Trans.
Graph., 25:779–786.
Levin, A., Lischinski, D., and Weiss, Y. (2006). A closed
form solution to natural image matting. In Proceed-
ings of the 2006 IEEE Computer Society Conference
on Computer Vision and Pattern Recognition - Volume
1, pages 61–68, Washington, DC, USA. IEEE Com-
puter Society.
Levin, A., Rav-acha, A., and Lischinski, D. (2008). Spectral
matting. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 30:1699–1712.
McGuire, M., Matusik, W., and Yerazunis, W. (2006). Prac-
tical, real-time studio matting using dual imagers. In
Rendering Techniques 2006 (Proceedings of the 17th
Eurographics Symposium on Rendering). Eurograph-
ics, Eurographics Association.
Microsoft (last accessed May 2011). Kinect full body inter-
action. http://www.xbox.com/kinect.
Mishima, Y. (1992). A software chromakeyer using poly-
hedric slice. NICOGRAPH’92, pages 44–52.
Pitie and, F. and Kokaram, A. (2010). Matting with a depth
map. In Image Processing (ICIP), 2010 17th IEEE
International Conference on, pages 21–24.
Rhemann, C., Rother, C., Wang, J., Gelautz, M., Kohli, P.,
and Rott, P. (2009). A perceptually motivated online
benchmark for image matting. In Computer Vision
and Pattern Recognition, 2009. CVPR 2009. IEEE
Conference on, pages 1826–1833.
Ruzon, M. and Tomasi, C. (2000). Alpha estimation in nat-
ural images. In Computer Vision and Pattern Recog-
nition, 2000. Proceedings. IEEE Conference on, vol-
ume 1, pages 18–25.
Shi, J. and Malik, J. (2000). Normalized cuts and image
segmentation. IEEE Transactions on Pattern Analysis
and Machine Intelligence (PAMI).
Smith, A. R. and Blinn, J. F. (1996). Blue screen mat-
ting. In Proceedings of the 23rd annual conference on
Computer graphics and interactive techniques, SIG-
GRAPH ’96, pages 259–268, New York, NY, USA.
ACM.
Sun, J., Li, Y., Bing, S., and yeung Shum, K. H. (2006).
Flash matting. In In Proceedings of ACM SIGGRAPH,
pages 772–778. ACM Press.
Vlahos, P. (July 11, 1978). Comprehensive Electronic Com-
positing System. U.S. Patent 4,100,569. Expired.
Wang, J. and Cohen, M. (2007). Optimized color sampling
for robust matting. In Computer Vision and Pattern
Recognition, 2007. CVPR ’07. IEEE Conference on,
pages 1–8.
Wang, O., Finger, J., Yang, Q., Davis, J., and Yang, R.
(2007). Automatic natural video matting with depth.
In Computer Graphics and Applications, 2007. PG
’07. 15th Pacific Conference on, pages 469–472.
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
288
