
HIERARCHICAL AND SPATIAL-COLORIMETRIC MODEL TO
DETECT MOVING TARGETS
C. Gabard
1
, C. Achard
2
, L. Lucat
1
and P. Sayd
1
1
CEA, LIST, Vision and Content Engineering Laboratory, Point Courrier 94, F-91191 Gif-sur-Yvette, France
2
UPMC Univ Paris 06, Institut des Systmes Intelligents et de Robotique (ISIR), Paris, France
Keywords:
MOG, SMOG, SGMM, Background Subtraction, Tracking, Foreground and Object Detection.
Abstract:
Background subtraction is often one of the first tasks involved in video surveillance applications. Classical
methods only use temporal modelling of the background pixels. Using pixel blocks with fixed size allows
robust detection but these approaches lead to a loss of precision. We propose in this paper a model of the
scene which combines a temporal and local model with a spatial model. This whole representation of the
scene both models fixed elements (background) and mobile ones. This allows improving detection accuracy
by transforming the detection problem in a two classes classification problem.
1 INTRODUCTION
With the explosion of the video surveillance deploy-
ment, ever more complex systems are needed to au-
tomatically detect and interpret events. These high-
level processes are generally based on preliminary
motion detection and tracking steps. Conventional
moving area detection methods, such as (Stauffer
and Grimson, 1999), exploit a statistical modeling of
background pixels. Thus, spatial consideration aim-
ing to take into account the object compactness is in-
troduced during the post-processing step. Moreover,
most of the literature approaches only use a back-
ground model. The proposed method is based on a hi-
erarchical model of the scene. It combines the advan-
tages of temporal pixel modeling and a global model-
ing of the scene which takes into account the spatial
pixel consistency. The detection decision, which is no
longer local but is performed on consistent pixel sets,
is thereby more robust.
2 RELATED WORK
The SGMM approach is mainly used in two ways:
Tracking: the SGMM models only moving targets.
Each target is then represented by a set of modes
that can be temporally tracked (Wang et al., 2007;
Gallego et al., 2009).
Background Subtraction: SGMM is used to model
the whole scene, both background and foreground
(Dickinson et al., 2009; Yu et al., 2007).
In this approach, the mixture of Gaussian is used
to model the whole scene and not each pixel inde-
pendently. Thus, a list of modes is update to rep-
resent the whole image. Observation at each pixel
is composed of both spatial and color components
x
t
= [x, y, R, G, B]. The scene is then represented by
a set of Gaussian distributions in a five-dimensional
space. Initialization of SGMM which does not require
any learning period, is performed on the first frame of
the sequence. For example some authors (Yu et al.,
2007; Wang et al., 2007) use the Exception Maximi-
sation algorithm. As such algorithms may slowly con-
verge, some other works like (Dickinson et al., 2009)
involve some heuristics to successively cut and merge
modes by analyzing the statistical characteristics of
data distribution. Finally, while an initial hand-made
object segmentation is often provided (Yu et al., 2007;
Wang et al., 2007; Gallego et al., 2009), some works
such as (Dickinson et al., 2009) allow to dynamically
create object modes.
3 THE PROPOSED APPROACH
The proposed system takes some advantages of the
work presented in (Dickinson et al., 2009) and intro-
505
Gabard C., Achard C., Lucat L. and Sayd P..
HIERARCHICAL AND SPATIAL-COLORIMETRIC MODEL TO DETECT MOVING TARGETS.
DOI: 10.5220/0003871105050508
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 505-508
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

duces major extensions. First, we propose to monitor
the mode evolutions in order to avoid important drift.
A new decision step is also introduced to label each
mode as background or object.
3.1 Initial Model Construction
A mode list is built from the first image to model the
scene. It is necessary to check that each mode is con-
sistent, both in terms of color and spatial compact-
ness. In order to build the initial model, only one
mode is first created using the whole image data. The
settings of the component j are estimated from the
pixels x ∈ L
j
according to:
ω
j
=
n
j
N
µ
j
=
1
n
j
∑
x∈L
j
x
Σ
j
=
∑
x∈L
j
x
T
x
n
j
− µ
T
j
µ
j
(1)
where n
j
is the number of pixels in L
j
, and N
the total number of pixels. A succession of split and
merge operations are then performed.
3.2 Mode Splitting and Merging
Modes are split iteratively until two alternating stop
criterions are reached. At each iteration, the mode
maximizing the curent tested criterion is selected and
if is above a predefined threshold, then the component
is cut in the largest eigenvector direction. The two
criterions measures respectively the color dispersion
and the inverse spatial density:
C
C
j
=
v
u
u
t
3
∑
k=1
λ
C
j,k
2
C
S
j
=
r
∑
2
k=1
λ
S
j,k
2
n
j
(2)
with λ
C|S
j,k
are the eigenvalues estimated from the
color and spatial covariance matrix.
Afterwards similar components are gathered as
described in (Dickinson et al., 2009). All pairs of
components are considered and the pairs are grouped
if their characteristics are similar: the average value
of one mode is well represented within a confidence
interval by the other mode.
Finally, components representing spatially discon-
nected regions are identified and split to represent
these regions independently.
3.3 Pixel Assignment and Update
Once the scene model is initialized, continuous
frame-based processing is performed. Given a new
incoming image, the value of a pixel can be classified
according to the mode (or component) providing the
maximum posterior probability, C
map
. Using the log-
likelihood:
C
map
= argmax
j
{log(p(x
t
|θ
( j,t)
))} (3)
where p(x
t
|θ
( j,t)
) is the probability density of the
mode j with parameters θ
( j,t)
. The model is simpli-
fied by assuming color and spatial independence.
The pixel is assigned to the mode providing the
highest likelihood. An uniform distribution is added
to manage emergence of a new object. Regions con-
taining an high density of pixels assigned to this dis-
tribution are used to create new components.
After pixel assignment, parameters of the compo-
nents are re-estimated. For each component j, a set of
parameters θ
( j,sm)
is calculated from the current im-
age pixels assigned to it. From the above parameters
θ
( j,t−1)
, the new values θ
( j,t)
are calculated using an
adaptive learning (α
j
denotes the learning rate):
θ
( j,t)
= α
j
.θ
( j,sm)
+ (1 − α
j
)θ
( j,t−1)
(4)
Without constraint, modes are likely to highly de-
viate away from the initial model. In order to avoid
mode drifts, we propose to adjust the modes by per-
forming the same split and merge steps as during ini-
tialization. These few operations help to maintain a
consistent list of components for both color and space
point of view, and greatly improve detection results.
3.4 Mode Labeling
Each mode can represent a background area or be at-
tached to a moving object. Detection output involves
a background or foreground classification decision.
We propose in this paper to perform the decision at
the mode level using a pixel-based classification pro-
vided by a local temporal modeling like the Stauffer
and Grimson (Stauffer and Grimson, 1999) algorithm.
The decision is globally performed on a pixel group.
To this end, we use the probability map generated by
the Stauffer and Grimson method and threshold the
average value of this map over all mode’s pixels.
4 RESULTS
4.1 Acquisition Noise Sensitivity
This experiment aims to asses the sensitivity of our
approach to the image quality. A sequence, named
”Blue Room”, is an indoor scenario whose environ-
ment is under control. Gaussian noise, spatially and
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
506
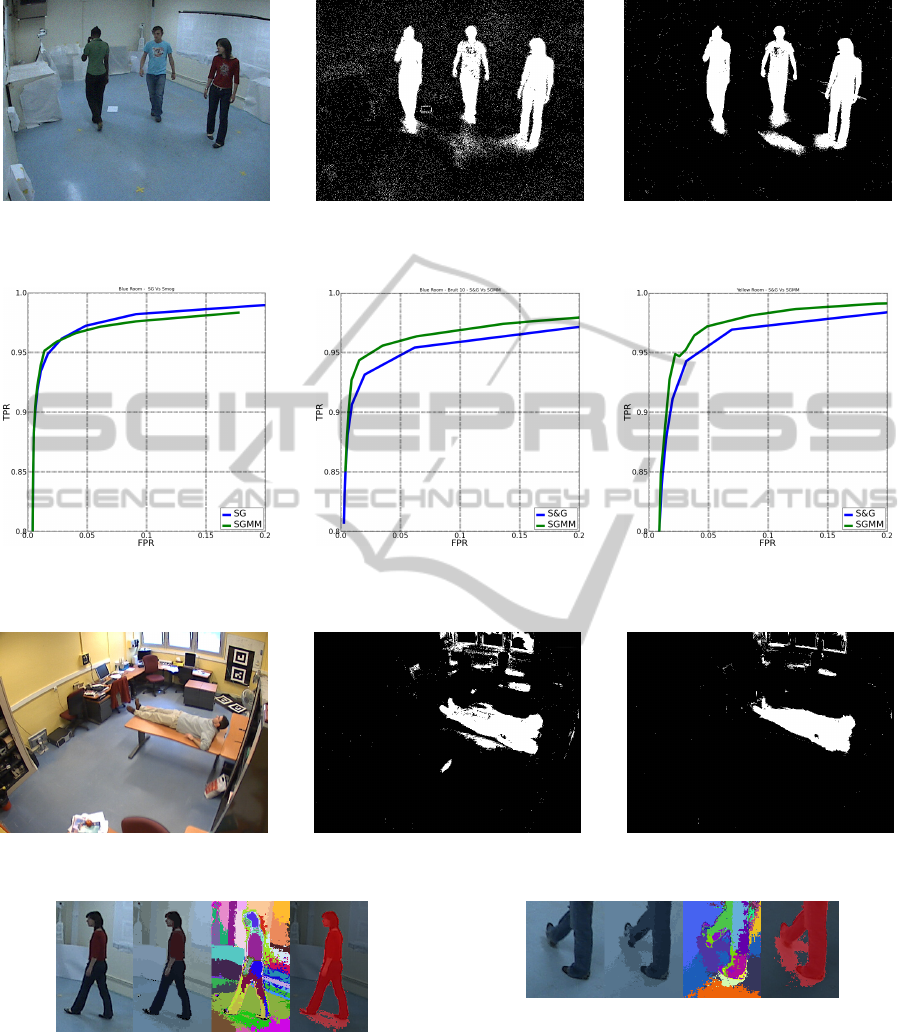
Figure 1: ”Blue Room” sequence: Sequence is subject to a Gaussian noise with standard deviation of 10. From left to right:
Source frame; Stauffer and Grimson algorithm; our algorithm.
Figure 2: ROC curves sequence results: On left to right: ”Blue Room” original sequence results; ”Blue Room” degraded
by a Gaussian noise with standard deviation of 10; ”Yellow Room” sequence.
Figure 3: ”Yellow Room” sequence: From left to right: Source frame, Stauffer and Grimson algorithm and our algorithm.
Figure 4: Target decomposition: Image source, associated
mode mean color, mode identification and detection result.
timely independent with a standard deviation of 10,
has been injected into the sequence. Some results are
presented in Figure 1 and ROC curves are ploted in
Figure 2. In the absence of noise, results are quite
similar for both methods. However it can be observed
that our algorithm performance remains stable while
Figure 5: Shadow separation: Image source, associated
mode mean color, mode identification and detection result.
the Stauffer & Grimson algorithm loses precision as
the noise increases.
4.2 Difficult Conditions
A more complicated sequences have been tested.
”Yellow Room” is an Indoor sequence. The condi-
HIERARCHICAL AND SPATIAL-COLORIMETRIC MODEL TO DETECT MOVING TARGETS
507

Figure 6: Grouping robustness: Top Line: Image source,
mode mean color, mode identification; Bottom line: Prob-
ability map from ”Stauffer & Grimson”, corresponding de-
tection results and detection result with our method.
tions are difficult due to direct outdoor lighting chang-
ing during the sequence and a light flicker. The results
are plotted in Figure 3 and Figure 2. The proposed
method outperforms the pixel-based method.
4.3 Detailed Analysis of some
Characteristics
Beyond these general performance, it is relevant to
focus on some algorithm behaviors:
Target Decomposition. Figure 4 highlights the gen-
erated modes decomposition on a person. Each
mode is represented by a random color for bet-
ter visualisation. It can be observed that the tar-
get and the background are clearly segmented
and also that the different body members are seg-
mented, which could be useful for a higher-level
analysis.
Shadow Separation. As many algorithms, the pro-
posed method classifies some shadows as mov-
ing objects. However, by analyzing the compo-
sition of the modes (Figure 5), we can notice
that shadows are segmented in dedicated modes.
Treatments for shadows removal are simplified as
group of pixels can directly be studied and com-
pared to old background.
Grouping Robustness. To illustrate the grouping
interest, it is relevant to focus on difficult cases
such as the Tee-shirt whose color is close to the
background color (Figure 6). The Stauffer and
Grimson method generates many misdetections.
The mode-based decision of the proposed algo-
rithm alleviates these problems.
Object Tracking. Finally, assuming that the move-
ment of objects from one image to the following is
relatively small, the corresponding modes follow
the object. If the object movement is more im-
portant, the ”old” component will disappear and a
corresponding new component will be automati-
cally created: the segmentation and labeling pro-
cess remain effective.
5 CONCLUSIONS
Conventional approaches typically performes a local
modeling independently on each pixel. Using blocks
of pixels of pre-determined shape and size to estimate
a descriptor often leads to more robustness, but the
spatial precision is then deteriorated. The proposed
approach provides a solution to overcome these limi-
tations by combining the accuracy of the pixel infor-
mation with the robustness of a decision made on a
set of coherent pixels. The experimental results pre-
sented emphasized that the proposed approach im-
proves performances, with respect to both Stauffer
and Grimson method and state-of-art SGMM. In par-
ticular, thanks to the spatial consistency, this approach
remains very stable in noisy and dynamic conditions.
REFERENCES
Dickinson, P., Hunter, A., and Appiah, K. (2009). A spa-
tially distributed model for foreground segmentation.
Image and vision computing.
Gallego, J., Pardas, M., and Haro, G. (2009). Bayesian
foreground segmentation and tracking using pixel-
wise background model and region based foreground
model. In Image Processing (ICIP).
Stauffer, C. and Grimson, W. (1999). Adaptive background
mixture models for real-time tracking. In CVPR.
Wang, H., Suter, D., Schindler, K., and Shen, C. (2007).
Adaptive object tracking based on an effective appear-
ance filter. IEEE transactions on pattern analysis and
machine intelligence.
Yu, T., Zhang, C., Cohen, M., Rui, Y., and Wu, Y. (2007).
Monocular video foreground/background segmenta-
tion by tracking spatial-color gaussian mixture mod-
els. In Motion and Video Computing.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
508
