
VISIBILITY RESTORATION FROM SINGLE IMAGE BASED
OPTICAL MODEL
Qieshi Zhang
†‡
and Sei-ichiro Kamata
†
†
Graduate School of Information, Production and Systems, Waseda University, Tokyo, Japan
‡
Japan Society for the Promotion of Science (JSPS) Research Fellow, Japan
Keywords:
Haze Removal, Single Image, Optical Model, Color Barycenter Hexagon (CBH) Model, Watershed.
Abstract:
In this paper, we propose a segmentation based method to estimate the haze-free image by the optical model. In
this work, we estimate the atmospheric light by color barycenter hexagon (CBH) model and use the watershed
to segment the image to calculate transmission map by dark pixels with single image. Firstly, non-color
region is segmented by CBH model and calculate the atmospheric light. Then, use the watershed with rang
component of CBH model to segment the color image into several sub-regions, and estimate the transmission
map. Finally, use the optical model with the parameters to restore the haze-free image. The experimental
results show that our method is more effective and able to get better results than other compared single image
based methods.
1 INTRODUCTION
Image taken in the outdoors scenes usually influenced
by many nature elements, such as, haze, smoke, fog,
rain, snow and other atmosphere factors. Among of
them, the atmosphere quality, haze is the most com-
mon problem in our daily life.So the haze removal
problem needs be studied and obtain the more clear
image for keeping the image quality in practical ap-
plication.
For solving this problem, one kinds of ap-
proach is multi-image which captured in same scene
with different haze level (Narasimhan and Nayar,
2000) (Narasimhan and Nayar, 2002) (Narasimhan
and Nayar, 2003). These methods are use the multi-
image to estimate the depth information. However,
if the condition difference is little or hard to obtain
the several images, the results will not accuracy. But,
in many practical conditions, it’s hardly to obtain the
multi-image in same scene, especially the real-time
application. So this condition limits the development
and the practical application. Considering this short
come, more and more researchers aim to do the re-
search in single image for solving this. However,
to obtain the depth information from single image is
very difficult.
Short recently, some single image based haze
removal methods have been developed (Fattal,
2008) (Tan, 2008) (Kratz and Nishino, 2009) (He
et al., 2009). For single image, the depth information
can’t be calculated directly, so the estimation based
methods are used. To solve this, the main framework
is the optical model which widely be used. Fattal (Fat-
tal, 2008) uses the Independent Component Analysis
(ICA) to estimate the transmission map, but it hardly
to obtain ideal results in heavy hazy condition. Also,
if the ICA assumption not correctly enough, it will
get wrong result. Tan (Tan, 2008) calculates the max-
imization of local contrast to enhance the image, and
use Markov Random Field (MRF) for haze removing.
But this method didn’t consider the atmospheric light,
so usually it leads to over-enhanced of some regions,
specially the sky region. By analyzing many haze-
free images, He et al. (He et al., 2009)propose a dark
channel prior. The priors show that the haze-free im-
age is close to black, and for hazy image become to
bright. So its can be used to estimate the transmission
map and the atmospheric light. However, for local
bright or multi-light source it hard to obtain ideal re-
sults.
Considering the advantage and disadvantage of
existing single image based methods, this paper pro-
posed estimate the parameters by segmentation in
CBH component.
The remainder of this paper as follows: In Section
2, the optical model is be introduced at first. Then,
atmospheric light and transmission estimation are de-
scribed. The compression and discussion of experi-
213
Zhang Q. and Kamata S..
VISIBILITY RESTORATION FROM SINGLE IMAGE BASED OPTICAL MODEL.
DOI: 10.5220/0003877902130216
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 213-216
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

mental results are shown in In Section 3. Finally, we
conclude the advantage of proposed method and the
future works.
2 HAZE REMOVAL ALGORITHM
Nowadays, the image optical (degradation) model is
mostly be used in single image based haze removal
methods (Fattal, 2008) (Tan, 2008) (He et al., 2009):
Y(x) = I(x)e
−βd(x)
+ A(1− e
−βd(x)
), (1)
where Y(x) is the hazy image, I(x) is the haze-free
image; e
−βd(x)
is the atmosphere attenuation term, β
is the coefficient and d(x) is the distance from object
to imaging plan (here call as the depth); A is the atmo-
sphere light, and x is the position of pixel. Observing
this model and the atmospheric scattering theory, the
first term in the right hand is the diffuse reflectance of
object and second term is the the diffuse reflectance
of depth. For describe the model more simply, the
e
−βd(x)
can use T(x) to instead. So the Eq. ( 1) can be
rewritten as:
Y(x) = I(x)T(x) + A[1− T(x)], (2)
where T(x) is the transmission map and have same
feature with depth map. To estimate the haze-free im-
age I(x), only need get the atmosphere A and trans-
mission map T(x). However, single image haze re-
moval problem is an ill-posed problem so it needs
use some methods to change it to well-posed prob-
lem. Because of the parameters are unknown and can-
not to estimate the original haze-free image by optical
model exactly.
For estimating the A and T(x), the first step is esti-
mate the A and then use it to estimate the transmission
T(x). Recently, He et al. (He et al., 2009) proposed a
new approach by observing the darkest value of R, G,
and B of every pixel and defined it as dark channel.
I
min
(x) = min[R(x),G(x),B(x)], (3)
And then get the statistical by dark values (I
min
(x))
of many hazy images to get the prior which the dark
channel can be defined as the transmission map (re-
flect the depth information) to estimate the haze-free
image. He’s method is new and the dark channel is
novel, this prior is effective but in sometimes, the es-
timation of A and T(x) is not accuracy enough. So in
this paper, we use the dark prior with optical model
and improve the parameters selection.
2.1 Atmosphere Light A Estimation
In some existing works, the atmosphere light A is es-
timate from the hazy image directly, but it usually not
correct. In He’s method (He et al., 2009), the author
use the dark channel as Eq. 3 defined to estimate the
position of A and calculate it from hazy image with
same pixel. However, in some situations the local
white influence it strongly, because the atmosphere
light candidate should lager than white object. In He’s
method, by the some objects influence (such as the
tree), the sky region may become to several separate
regions and small than white object, also maybe the
light intensity is weaker than it too. In this situation,
the atmosphere light A usually select the white object
and influence the estimation.
So to overcome this problem, the first thing is ob-
taining the correct candidate region and then select
the ideal values. Here we use the color barycenter
hexagon (CBH) model (Zhang and Kamata, 2008) to
calculate the gray region (not real gray, only the pixels
which not reflect the color information) for obtaining
the atmosphere. At first, use the CBH model to de-
tect the color pixels and turn them into black [Fig.
1(b)], then use the Eq. 3 to calculate the dark pix-
els [Fig. 1(c)]. After this processing, calculate the
0.1% brighter pixels in the image and use the average
value of these pixels in original image as the atmo-
sphere light A. By this selection, the obtained value
can overcome the multi-light source influence.
2.2 Atmospheric Veil Transmission T(x)
Estimation
Considering the different objects have different dif-
fuse reflection ability, also deferent distance have dif-
ferent diffuse reflection, here assume these two re-
flection are same simply. As the dark prior of He’s
method, here we also use it to estimate the transmis-
sion map. Different with He’s method, in current pa-
per we segment the image at first and then calculate
in every region respectively.
In He’s method, the overlapped patches are used
to calculate the dark pixel to estimate the transmis-
sion. In our research, the segmentation with patches
are not the idea in many times, so the region segmen-
tation based method is studied to solve this. Consid-
ering the hazy image usually captured in city and in-
clude many small details and edge. So the normal
edge detection or region segmentation method hard to
get idea segment ion result. So here the watershed
segmentation which introduced by Beucher and Lan-
tujoul (Beucher and Lantujoul, 1979) is used. How-
ever, usually this method only used for gray image
and can’t used for color image directly. So here we
use the CBH model to convert the RGB image to
get the rang image which can reflect the color and
region information more clear than normal gray im-
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
214
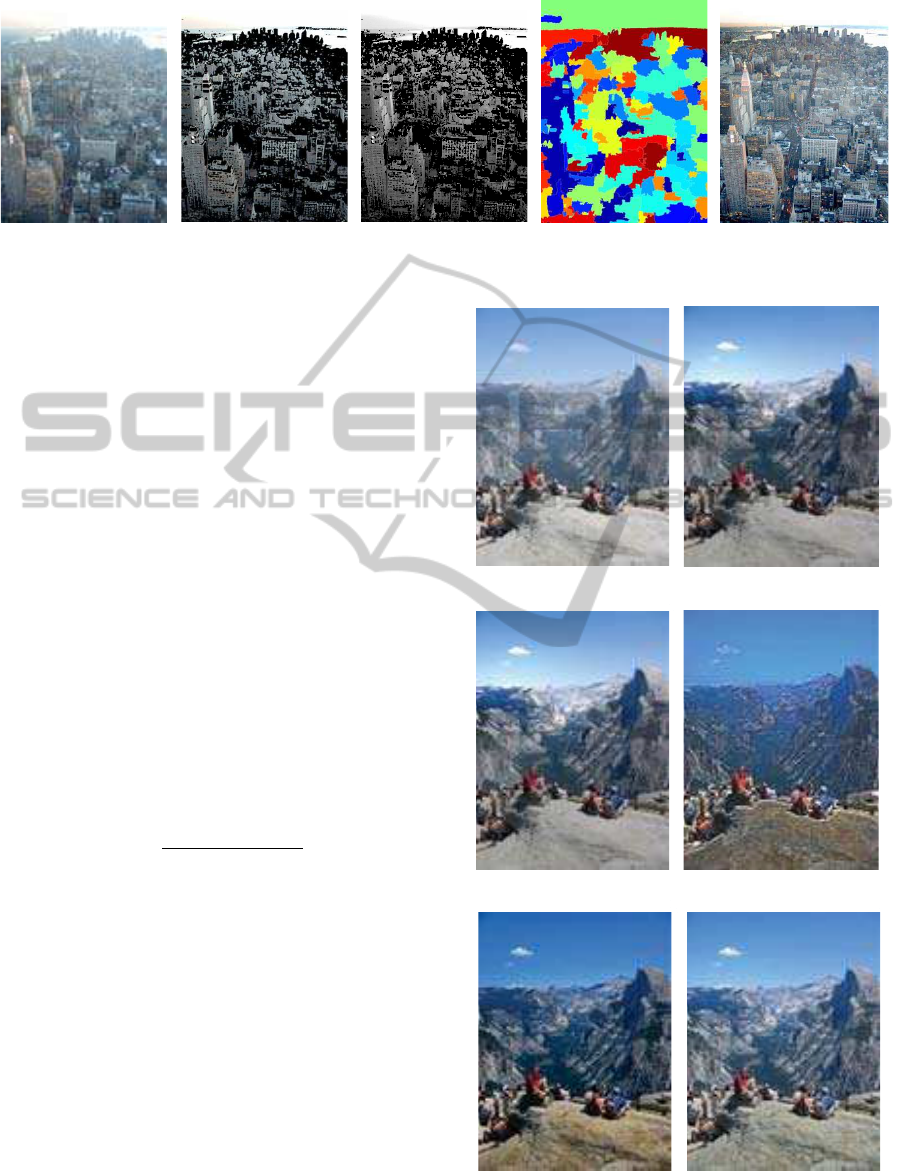
(a) Hazy image (b) Non-color region (c) Dark pixel (d) Segmented image (e) Our result
Figure 1: Atmosphere light estimation
age. After this, use the watershed method to segment
the image to get several region [Fig. 1(d)]. If the
area of region lager than 200 pixels, segment it into
s = area/200 sub-regions equally, otherwise ignore
it. Then, calculate the local minimum of every re-
gion with min(R,G,B) to obtain the rough transmis-
sion map T
r
(x). For obtaining more accuracy trans-
mission, the soft matting (Levin et al., 2006) as He
described is used to optimal T
r
(x) to show more de-
tails transmission T(x).
2.3 Recovering the Haze-free Image
With the atmospheric veil transmission T(x) and the
atmosphere light A, the haze-fee image can be calcu-
lated by Eq. 2. Considering in sometimes, the value
of estimated T(x) is close to zero, direct use it may
let the recovered pixel become to infinite. So use
the minimum transmission value T
0
to limit the lower
bound same as He’s method (He et al., 2009). Finally,
the recovered haze-free image I(x) can be calculated
by following equation:
I(x) =
Y(x) − A+ AT(x)
max[T(x),T
0
]
, (4)
here T
0
set as 0.1. After the recovering, for obtaining
more natural vision effect, the contract enhancement
method (Zhang and Kamata, 2012) is used.
3 EXPERIMENTAL AND
DISCUSSION
For comparing the results with other methods, some
widely compared images are tested. In the experi-
mental part, the previous works (Fattal, 2008) (Tan,
2008) (He et al., 2009) and histogram equalization
(HE) are compared.
In Figs. 2 and 3, two natural images are com-
pared with existing single image based methods. In
(a) Hazy image (b) HE
(c) Fattal’s result (d) Tan’s result
(e) He’s result (f) Our result
Figure 2: Result comparison 1.
VISIBILITY RESTORATION FROM SINGLE IMAGE BASED OPTICAL MODEL
215

(a) Hazy image (b) HE
(c) Fattal’s result (d) Tan’s result
(e) He’s result (f) Our result
Figure 3: Result comparison 2.
the 5 compared methods, HE makes the near region
become darker and the far region brighter, but the
haze removal effect is not good in far distance region.
The effect of Fattal’s methods (Fattal, 2008) is a little
weak, only the near region have good effect. Tan’s
method (Tan, 2008) is the worst, too many details and
the color information are missing because of the local
contrast enhancement lost the global constraint. So
the air region become to blue and the saturation of
buildings become too deep. He’s method (He et al.,
2009) can get good effect, but the air region is not nat-
ural than HE, and the long distance become to dark.
Compared with other methods, the proposed method
makes the whole image become to clear, keeps the
details and seems more natural.
4 CONCLUSIONS AND FUTURE
WORKS
In this paper, a segment ion and CBH model based at-
mospheric light and transmission estimation method
is proposed. The presented method use the color re-
gion segmentation to estimate transmission more ac-
curacy and can restore more details for vision.
However, how to segment the image to get more
accuracy transmission and without use the soft mat-
ting need be studied.
REFERENCES
Beucher, S. and Lantujoul, C. (1979). Use of watersheds
in contour detection. In In Int’l Workshop on Im-
age Processing: Real-time Edge and Motion Detec-
tion/Estimation.
Fattal, R. (2008). Single image dehazingr. In ACM SIG-
GRAPH, pages 1956–1963.
He, K., Sun, J., and Tang, X. (2009). Single image haze
removal using dark channel prior. In IEEE Computer
Vision and Pattern Recognition (CVPR), pages 1956–
1963.
Kratz, L. and Nishino, K. (2009). Factorizing scene albedo
and depth from a single foggy image. In IEEE Int’l
Conf. on Computer Vision (ICCV), pages 1701–1708.
Levin, A., Lischinski, D., and Weiss, Y. (2006). A closed
form solution to natural image matting. In IEEE Int’l
Conf. on Computer Vision and Pattern Recognition
(CVPR), volume 1, pages 61–68.
Narasimhan, S. and Nayar, S. (2000). Chromatic frame-
work for vision in bad weather. In IEEE Int’l Conf.
on Computer Vision and Pattern Recognition (CVPR),
volume 1, pages 598–605.
Narasimhan, S. and Nayar, S. (2002). Vision and the at-
mosphere. In Int’l J. of Computer Vision, volume 48,
page 233254.
Narasimhan, S. and Nayar, S. (2003). Contrast restoration
of weather degraded images. In IEEE Trans. on Pat-
tern Analysis and Machine Intelligence (T-PAMI), vol-
ume 25, pages 713–724.
Tan, R. (2008). Visibility in bad weather from a single im-
age. In IEEE Computer Vision and Pattern Recogni-
tion (CVPR), pages 1–8.
Zhang, Q. and Kamata, S. (2008). Automatic road sign de-
tection method based on color barycenters hexagon
model. In Int’l Conf. on Pattern Recognition (ICPR
2008, pages 1–4.
Zhang, Q. and Kamata, S. (2012). Image contrast enhance-
ment by exact histogram adjustment. In IPSJ Trans.
on Computer Vision and Applications (CVA).
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
216
