
From an Autonomous Soccer Robot to a Robotic
Platform for Elderly Care
Jo
˜
ao Cunha, Eurico Pedrosa, Cristov
˜
ao Cruz, Ant
´
onio J. R. Neves, Nuno Lau,
Artur Pereira, Ciro Martins, Nuno Almeida, Bernardo Cunha, Jos
´
e Luis Azevedo,
Pedro Fonseca and Ant
´
onio Teixeira
Transverse Activity on Intelligent Robotics, IEETA / DETI, University of Aveiro,
Aveiro, Portugal
Abstract. Current societies in developed countries face a serious problem of
aged population. The growing number of people with reduced health and ca-
pabilities, allied with the fact that elders are reluctant to leave their own homes
to move to nursing homes, requires innovative solutions since continuous home
care can be very expensive and dedicated 24/7 care can only be accomplished by
more than one care-giver.
This paper presents the proposal of a robotic platform for elderly care integrated
in the Living Usability Lab for Next Generation Networks. The project aims at
developing technologies and services tailored to enable the active aging and inde-
pendent living of the elderly population. The proposed robotic platform is based
on the CAMBADA robotic soccer platform, with the necessary modifications,
both at hardware and software levels, while simultaneously applying the experi-
ences achieved in the robotic soccer environment.
1 Introduction
Current societies in developed countries face a serious problem of aged population.
The growing number of people with reduced health and capabilities, allied with the fact
that elders are reluctant to leave their own homes to move to nursing homes, requires
innovative solutions since continuous home care can be very expensive and dedicated
24/7 care can only be accomplished by more than one care-giver.
Technology directed to Ambient Assisted Living can play a major role in improving
the quality of life of elders, enabling and fostering active aging without leaving their
homes. In the context of this scenario, the introduction of a mobile robotic platform
could be an asset, by complementing and enhancing the deployed infrastructure. A robot
can be a mobile monitoring agent, by providing images from spots that are occluded
from the house cameras, as well as helping to reduce the feeling of loneliness that often
affects the elderly, when endowed by means of human interaction.
Ever since the first robots were created, researchers have tried to integrate robots in
our daily lives. In particular, domestic assistants have been a constant driving goal in
the area, where robots are expected to perform full daily chores in a home environment.
Cunha J., Pedrosa E., Cruz C., J. R. Neves A., Lau N., Pereira A., Martins C., Almeida N., Cunha B., Luis Azevedo J., Fonseca P. and Teixeira A..
From an Autonomous Soccer Robot to a Robotic Platform for Elderly Care.
DOI: 10.5220/0003879700480060
In Proceedings of the 2nd International Living Usability Lab Workshop on AAL Latest Solutions, Trends and Applications (AAL-2012), pages 48-60
ISBN: 978-989-8425-93-5
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

While some simple forms of domestic robots, such as vacuum cleaner robots, are in-
creasingly becoming part of our everyday life, robots designed for human care are far
from commercialization.
Meanwhile, a large number of this type of robots have been developed over decades
by academies and research groups. The results and insights obtained through the con-
ducted experiences will undoubtedly shape the care robots of tomorrow in fields such
as Face Recognition, Speech Recognition, Sensor Fusion, Navigation, Manipulation,
Artificial Intelligence and Human-Robot Interaction to name a few.
This paper presents the proposal of a robotic platform for elderly care based on a
robotic soccer platform, with the necessary modifications, both at hardware and soft-
ware levels, while simultaneously applying the experiences achieved in the robotic soc-
cer environment.
The Institute of Electronics and Telematics Engineering of Aveiro (IEETA), a re-
search unit of the University of Aveiro (UA), Portugal, have been developing, for many
years, a significant activity in the context of mobile robotics. One of the most visi-
ble projects that has resulted from this activity is the Cooperative Autonomous Mobile
roBots with Advanced Distributed Architecture (CAMBADA) [1] robotic soccer team.
The CAMBADA project provided vast experience in areas such as Distributed Ar-
chitectures [2], Machine Vision [3], Sensor Fusion [4], Multi-Robot Cooperation [5],
to name a few. This experience is reflected in the series of positive results achieved in
recent years. The CAMBADA team won the last five editions of the DFBR National
Championship, placed second in the DFBR European Championship and placed third
in DFBR World Championship while winning the world title in DFBR.
There is no better proof of the successful application of soccer robots in home envi-
ronments than the RoboCup@Home
1
league. This league was created in 2006 from the
need to place more emphasis on real world problems, not addressed in robotic soccer
[6]. This league is currently the largest league of the RoboCup initiative and includes
a vast number of teams that started as soccer teams and then evolved to this robotic
paradigm [7].
As stated before, the goal of this paper is to present a mobile autonomous robot de-
signed to improve the quality of life of an elderly person in a household environment. In
order to achieve this goal, the robot should be able to perform important tasks, namely
be safe for users and the environment, avoid dynamic and static obstacles, receive in-
formation from external sensors, execute external orders, among others.
We will present all the parts involving the development of the robot, focusing on the
following topics:
– distributed hardware architecture;
– hardware abstraction from the high-level software;
– machine vision algorithms for recognition of objects present in a home environ-
ment;
– sensor and information fusion;
– indoor self-localization;
– automatically modeling of the environment and construction of occupancy maps;
1
www.robocupathome.org
49

– multimodal human-robot interaction;
– robot control and monitoring.
The development of a robotic platform for elderly care is part of a broader project
named Living Usability Lab for Next Generation Networks
2
. The project is a collabora-
tive effort between the industry and the academy that aims to develop and test technolo-
gies and services that give elderly people a quality lifestyle in their own homes while
remaining active and independent.
The main contribution of this paper is to present new advances in the areas de-
scribed above, regarding the development of a mobile autonomous robot focused on
Ambient Assisted Living, taking the example of the adaptation of a soccer robot from
the CAMBADA team, developed in the UA, Portugal. The result of this project led
to the creation of the CAMBADA@Home team, with the aim to participate in the
RoboCup@Home competition.
The remainder of this paper is organized as follows. The robot hardware and soft-
ware architecture are presented in Section 2. The methods applied to extract useful
information from the robot sensors are presented in Section 3. The indoor localization
algorithm is discussed in Section 4. The applied methods for indoor safe navigation
are detailed in Section 5. The capabilities of interaction with humans are discussed in
Section 6. Finally Section 8 presents the conclusions of this paper.
2 System Overview
The robotic platform used is based on the CAMBADA robotic soccer platform. The
robot has a conical base with radius of 24 cm and height of 80 cm. The physical structure
is built on a modular approach with three main modules or layers.
The top layer has the robot vision system. Currently the robot uses a single Mi-
crosoft Kinect camera placed on top of the robot pointing forwards. This is the main
sensor of the robot. The retrieved information is used for localization and path-planning
to predefined goals.
The middle layer houses the processing unit, currently a 13” laptop, which collects
data from the sensors and computes the commands to the actuators. The laptop executes
the vision software along with all high level and decision software and can be seen as the
brain of the robot. Beneath the middle layer, a network of micro-controllers is placed to
control the low-level sensing/actuation system, or the nervous system of the robot. The
sensing and actuation system is highly distributed, using the CAN protocol, meaning the
nodes in the network control different functions of the robot, such as motion, odometry
and system monitoring.
Finally, the lowest layer is composed of the robot motion system. The robot moves
with the aid of a set of three omni-wheels, disposed at the periphery of the robot at
angles that differ 120 degrees from each other, powered by three 24V/150W Maxon
motors (1). With this wheel configuration, the robot is capable of holonomic motion,
being able to move in a given direction independently of its orientation.
2
www.livinglab.pt
50

a) b)
Fig. 1. CAMBADA@Home hardware system: a) The robot platform. b) Detailed view of the
motion system.
Following the CAMBADA hardware approach, the software is also distributed.
Therefore, five different processes are executed concurrently. All the processes run at
the robot’s processing unit in Linux.
Inter-process communication is handled by means of a RealTime DataBase (http://
www.insticc.org/Primoris/RTDB) which is physically implemented in shared memory.
The http://www.insticc.org/Primoris/RTDB is divided in two regions, the local and
shared regions. The local section allows communication between processes running
in the robot. The shared section implements a Blackboard communication paradigm
and allows communication between processesrunning in different robots. All shared
sections in the http://www.insticc.org/Primoris/ RTDB are kept updated by an adaptive
broadcasting mechanism that minimizes delay and packet collisions.
The processes composing the CAMBADA@Home software are (2):
– Vision which is responsible for acquiring the visual data from the Kinect sensor.
– Sensorial Interpretation - Intelligence and Coordination is the process that inte-
grates the sensor information and constructs the robot’s worldstate. The agent then
decides the commands to be applied, based on the perception of the worldstate.
– Wireless Communications handles the inter-robot communication, receiving the
information shared by other robots and transmitting the data from the shared section
of the RealTime DataBase (http://www.insticc.org/Primoris/RTDB).
– Lower-level communication handler or hardware communication process is re-
sponsible for transmitting the data to and from the low-level sensing and actuation
system.
– Monitor that checks the state of the remaining processes, relaunching them in case
of abnormal termination.
Given the real-time constraints of the system, all process scheduling is handled by
a library specifically developed for the task, the Process Manager [1].
2.1 Monitoring Station
The monitoring station, also known as basestation, has a determinant role both during
the development of an autonomous assistant robot capability as well during its appli-
cation. The basestation is an adapted version of the CAMBADA team basestation [1]
51

Low-level control layer
Odometry
System
Monitor
Coordination Layer
Monitor
Process Manager
Sensorial
interpretation
Intelligence and
Coordination
Vision
Low-level
communication
handler
RTDB
Wireless
Communication
Motion
Fig. 2. CAMBADA@Home software architecture.
taking in consideration a set of requirements that emerge from the development of a
service and assistive robot (3).
The basestation application provides a set of tools to perform the control and mon-
itoring of the robot. Regarding the control activity, this application allows high level
control of the robot by sending basic commands such as run, stop and docking. It also
provides a high level monitoring of the robot internal state, namely its batteries sta-
tus, current role and behavior, indoor self-localization, current destination point, bread-
crumb trail, etc.
Furthermore, this application provides a mechanism that can be used to enforce a
specific behavior of the robot, for debugging purposes.
3 Perception
Humans rely heavily on vision or vision based abstractions to acknowledge the world,
to think about the world and to manipulate the world. It is only logical to empower
artificial agents with a vision systems with capabilities similar to the human vision
system.
The vision subsystem of this robot is constituted by a single depth sensor, the
Kinect, fixed at the top of the robot. It is accessed through the freenect
3
library, and
provides a depth and color view of the world. With the depth information, we create a
3D metric model of the environment. Using this model, we then extract relevant envi-
ronment features for the purpose of localization and navigation, namely the walls and
the obstacles. The proposed methods consider that the height and pitch of the camera
relatively to the ground plane remain constant, parameters that are set when the system
is calibrated.
3
http://openkinect.org/wiki/Main Page
52

Fig. 3. CAMBADA@Home basestation GUI. The GUI is divided in three panes. The lower pane
shows the internal state of the robots. The center pane draws the indoor blueprint and the robots
location. The right pane hold the robots control panel box (e.g. start, stop) and several operational
visual flags.
3.1 Pre-processing
Both wall and obstacle detection is done using only the depth image, which has 640 ×
480 pixels. The image is subsampled by a factor of 5 in both dimensions, leaving us
with a 128 × 96 image, which has proven to contain sufficient information for wall and
obstacle detection. This decision is not based on current time constraints, but was made
to account for future project developments.
3.2 Walls
A wall is a structure that delimits rooms. It is opaque and connects the floor to the
ceiling [9].
With this simple definition in mind, the approach we follow to identify the walls in
the environment is to select all the points with height, relative to the floor, lower than the
ceiling height and perform a column-wise search on the remaining points of the image
for the point which is farthest from the robot. The retrieved points are then used in later
stages of processing to allow for robot localization.
3.3 Obstacles
An obstacle is an occupied volume with which the robot can collide.
The obstacle detection method is similar to the one used for wall detection. To de-
tect the obstacles, we reject the points that have an height, relative to the floor, greater
than the robot height plus a margin to account for noise, or that belong the floor. The
point is considered to be floor if it’s height is lower than a threshold, method that proved
to be good enough to cope with the noise. We then perform a column-wise search on
the remaining points of the image for the point closest to the robot along the x axis.
At the end of this process we have 128 obstacle points that can be used for occu-
pancy belief update. In 4, we can observe a 3D occupancy map of a corridor and a
53
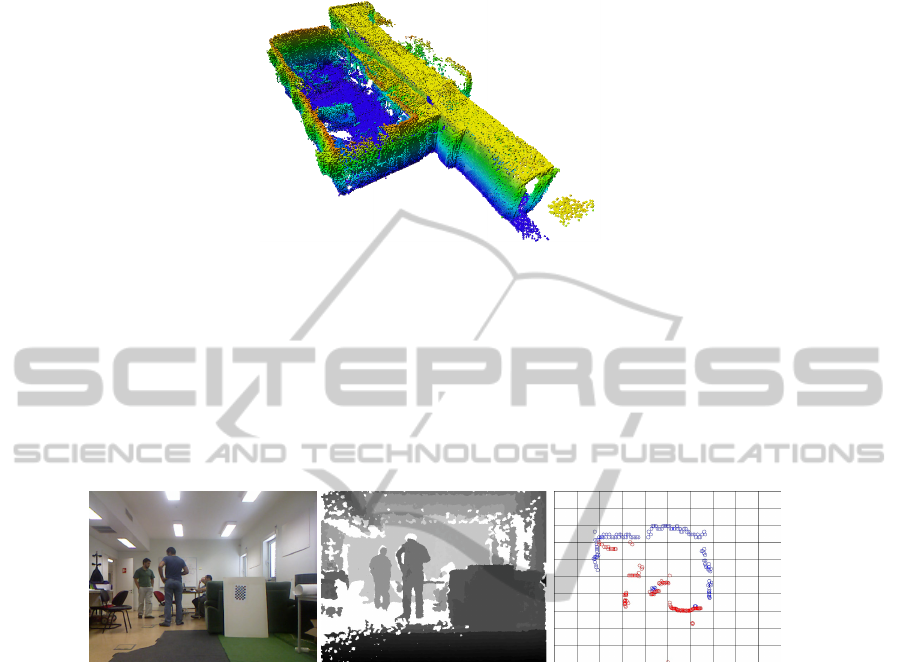
Fig. 4. A 3D occupancy map of a corridor and a laboratory of the IEETA building using informa-
tion from the Kinect depth sensor.
laboratory of the IEETA building, constructed over time, as the robot navigates through
the environment, with the observed obstacles captured by the Kinect depth sensor.
The algorithms described process the images captured by the Kinect depth camera
and extract the visible walls and obstacles. Using solely depth information the robotic
agent is able to detect walls without having to perform color calibration or without
being susceptible to natural lighting conditions (5).
a) b) c)
Fig. 5. Kinect vision system: a) The image captured by the Kinect rgb camera. b) The same image
captured by the Kinect depth camera. c) The 2D vision of the extracted information of the depth
camera, the blue points are walls and the red points are obstacles. The robot is placed in the
bottom center of the image.
4 Localization
For indoor localization, we successfully adapted the localization algorithm used by the
CAMBADA team to estimate a robot position in a robotic soccer field. The algorithm
was initially proposed by the Middle Size League (MSL) team Brainstormers Tribots
[10].
The Tribots algorithm [10] constructs a FieldLUT from the soccer field. A Field-
LUT is a grid-like data structure where the value of each cell is the distance to the
closest field line. The gradient of the FieldLUT values represents the direction to the
closest field line. The robot detects the relative position of the field line points through
vision and tries to match the seen points with the soccer field map, represented by the
54

FieldLUT. Given a trial position, based on the previous estimate and odometry, the
robot calculates the matching error and its gradient and improves the trial position by
performing an error minimization method based on gradient descent and the RPROP
algorithm [11]. After this optimization process the robot pose is integrated with the
odometry data in a Kalman Filter for a refined estimation of the robot pose.
To apply the aforementioned algorithm in a indoor environment the concept of white
line was replaced with the walls. In an initial phase, given a map of the environment,
usually the building blueprints, a FieldLUT list is created that contains all possible con-
figurations of seen walls for different positions. By testing a grid of points over the map,
a new FieldLUT is created, and added to the FieldLUT list, when a new configuration
of seen walls is detected. As the robot moves through the environment, it dynamically
loads the FieldLUT corresponding to its position, which should consist of the walls seen
in that part of the map.
The need to use a set of FieldLUTs instead of a single FieldLUT for the entire
map arises from the local minimum problem inherent to gradient descent algorithms.
Since the walls in a domestic environment have an associated height which is naturally
higher than the robot, from a given point in the environment there is usually a set of
walls that are out of the line-of-sight of the robot. This scenario doesn’t occur in a
robotic soccer field where the lines are co-planar with the field. Therefore using a single
FieldLUT could match the wall points extracted from the captured images to unseen
walls, resulting in erroneous self-localization.
The described method does not solve the initial localization problem. This is solved
by applying the visual optimization process on different trial positions evenly spaced
over the known map. To reduce the search space of the initial localization, the initial
heading of the robot is given by a digital compass.
5 Navigation
The robotic agent receives a sequence of goal points to go to in a patrolling manner.
As it arrives the goal point it decomposes its path to the next goal point in intermediate
goal points. The robot navigates between intermediate goal points in a straight line.
The considered metric map is a discrete two-dimensional occupancy grid. Each
cell-grid (x, y) has an associated value that yields the believed occupancy. The naviga-
tion plan is calculated by a path-finding algorithm supported by the probabilistic occu-
pancy map of the environment. Because of the dynamic nature of the environment the
robotic agent uses D* Lite [12], an incremental path-finding algorithm that avoids full
re-planning in face of changes in the environment. This methodology enables obstacle
avoidance seldom based on incremental path planning (6).
The environment is represented in an occupancy map implemented by the OctoMap
library [13]. Although OctoMap is capable of creating 3D occupancy maps, the envi-
ronment is projected onto the ground plane, thus constructing a 2D occupancy map of
the environment. Each change in the environment, tracked by the occupancy map, is
reflected in the corresponding cell-grid value used in the path-finding algorithm.
The perceived obstacles (x, y) points (3) are used to update the occupancy map.
For each obstacle (x, y) point the corresponding (x, y) node of the occupancy map
55

a) b)
Fig. 6. Incremental path planning: a) Path planned to achieve the goal point. b) A new obstacle
appeared in the path of the robot resulting in a re-planned path adjusted to the changes of the
environment.
is updated by casting a ray from the robot current point to the target node, excluding
the latter. Every node transversed by the ray is updated as free and the target updated
as occupied. However a maxrange value is set to limit the considered sensor range.
If an obstacle is beyond the maxrange, only the nodes transversed up to maxrange
are updated while the remaining nodes remain unchanged, including the target node.
However, due to the limited vertical field of view of the Kinect sensor, target nodes
where the Kinect sensor can not see the floor are updated as occupied without making
any assumption about the occupancy of the closer nodes. This is made to prevent the
freeing of nodes at the Kinect sensor vertical blind region.
6 Human-Robot Interaction
Spoken language is a natural way – possibly the most natural - to control and process
human-robot interaction. It has some important advantages: eyes and hands free; com-
munication from a distance, even without being in line of sight; no need for additional
learning for humans.
Therefore, we integrated in our mobile service robot some interaction facilities by
means of three spoken and natural language processing components: an Automatic
Speech Recognition (ASR) component to process the human requests (in form of com-
mand-like small sentences), a Text-to-Speech (TTS) component to generate more natu-
ral responses from the robot side, and a semantic framework (dialog manager) to control
how these two components work together.
The requirements for this spoken and natural language interaction system result
from the rulebook of the RoboCup@Home competition. An example of a use-case
is the Follow Me task where the robot is asked to follow user. In this use-case two
command-like sentences are needed: “[Robot’s Name] follow me” and“[Robot’s Name]
stop follow me”.
According the use-cases the following requirements for our speech-based interac-
tion system are defined:
– The speech recognition component should be speaker independent, have a small vo-
cabulary, and be context dependent and robust against stationary and non-stationary
environmental noise.
56
– The speech output should be intelligible and sound natural.
– The dialog manager system should be mixed-initiative allowing both robot and user
to start the action, provide or ask for help if no input is received or incorrect action
is recognized, and ask for confirmation in case of irreversible actions.
In terms of hardware two types of input systems are being tested: a robot mounted
microphone and a microphone array framework with noise reduction and echo cancel-
lation. To deal with the high amount of non-stationary background noises and back-
ground speech usually present in these interaction environments, a close speech detec-
tion framework is applied in parallel to noise robust speech recognition techniques.
Speech recognition is accomplished through the use of CMUSphinx, an Open Source
Toolkit for Speech Recognition project by Carnegie Mellon University. Additionally,
we are testing speech recognition results obtained by using the Microsoft Speech SDK.
For this propose both speaker dependent and speaker independent profiles are being
trained, and a specific grammar for command interaction defined, with each command-
like sentence preceded by a predefined prefix (robot’s name).
For robot speak-back interaction and user feedback, external speech output devices
(external speakers) will be used. The speech synthesis component will be implemented
by means of a concatenative system for speech output. For that propose, we are testing
the Microsoft Speech SDK and the FESTIVAL Speech Synthesis system developed at
the Edinburgh University. We are trying to implement some adaptation features like
using the information on distance from robot to user to dynamically change the output
volume, and changing the TTS rate from normal to slower according to user’s age.
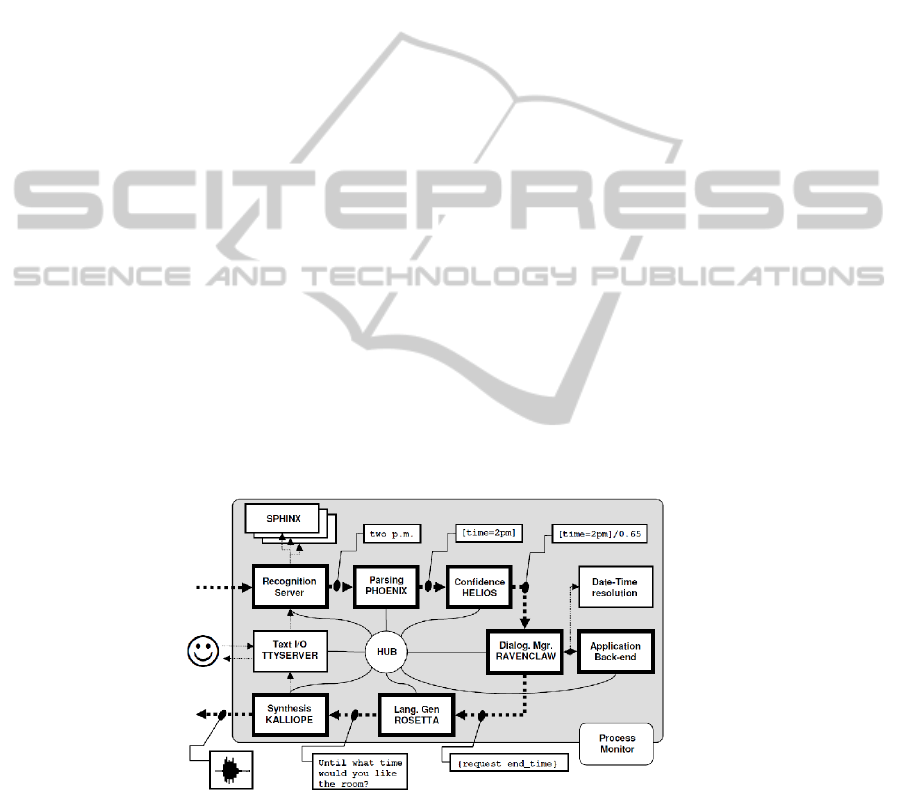
These tools are integrated in the Olympus framework [14] ( 7), developed at Carnegie
Mellon University, which provides a domain independent voice based interaction sys-
tem. This framework provides the Ravenclaw dialog manager [15], which interacts with
an application back-end, in this case the robot software architecture, to perform prede-
fined tasks such as the “Follow me” example.
Fig. 7. The Olympus framework, adapted from [14].
57

7 Future Developments
The CAMBADA@Home team plans a series of developments for the near future, mainly
based on the RoboCup@Home challenges, which present a benchmark to test and eval-
uate some of the most important skills of a service robot, such as, human robot inter-
action through gestures and natural language, guiding and following a human, object
manipulation and item fetching, among others.
7.1 Robotic Operating System
Although the CAMBADA middleware software, e.g. RTDB and PMAN, have been the
foundation of great in-house software, it lacks on flexibility, easy integrations with third
party software and scalability, just to name a few. Robot Operating System (ROS)
4
provides libraries and tools to help develop robotic application. It has a network centric
message-passing, hardware abstraction, device drivers, and more, under an open source
license backed by a growing scientific community. Due to its community, ROS offers
off-the-shelf solutions for mobile intelligent robotics, such as navigation, localization
and perception.
We intend to port our software to ROS. This change of middleware allows the team
to focus on open research topics instead of having to adapt or re-implement currently
used technologies, e.g. particle filters-based localization [16, 17], useful to represent
the uncertainty in localization associated maps with ambiguous topology. In turn, the
CAMBADA@Home expects to give back to the ROS community, by releasing the de-
veloped solutions as they mature and meet high quality standards.
7.2 Person Follow and Robotic Guidance
An assistive mobile robot should be able to follow the elder person under its “care”.
This type of behavior can foster a more dynamic monitoring of the elder(s), such as
falling while walking. Furthermore, the robot should be able to guide an elder, upon
request, to a certain location within the environment.
To meet this goal we are working on people detection and tracking algorithms, in
order to cope with the inherent movement of the elderly along the trajectory, to use with
the developed navigation algorithms obtaining a safe navigation when near the elderly.
7.3 Object Manipulation
In a scenario of reduced mobility, the service robot can be regarded as a surrogate for
the elderly during object manipulation and retrieval. To develop a robot capable of per-
forming such tasks we are currently investigating algorithms for object recognition in
unstructured environment. We are also planning to equipping the robot with an Assistive
Robotic Manipulator (ARM) to handle the detected object.
4
http://www.ros.org
58

8 Conclusions
This paper presents the necessary adaptations to enable a mobile robotic platform, based
on robotic soccer, to perform daily tasks in a indoor environment, more specifically to
an elderly care context. Namely, solutions related to perception in unstructured envi-
ronments, such as household environments, indoor localization, safe navigation and
human-robot interaction were discussed.
In future developments the authors are developing solutions to add on the obtained
results so far. Specifically, we are researching on detection and tracking of people in
the environment, while applying the developed navigation algorithms, to safely follow
a person through a home, or even inverting the roles and provide guidance in a safely
manner.
Acknowledgements
This work is part of the COMPETE - Programa Operacional Factores de Competitivi-
dade and the European Union (FEDER) under QREN Living Usability Lab for Next
Generation Networks (http://www.livinglab.pt/).
References
1. Neves, A., Azevedo, J., B. Cunha, N. L., Silva, J., Santos, F., Corrente, G., Martins, D.A.,
Figueiredo, N., Pereira, A., Almeida, L., Lopes, L.S., Pedreiras, P.: 2. In: CAMBADA soccer
team: from robot architecture to multiagent coordination. I-Tech Education and Publishing,
Vienna, Austria (In Vladan Papic (Ed.), Robot Soccer, 2010)
2. Azevedo, J. L., Cunha, B., Almeida, L.: Hierarchical distributed architectures for au-
tonomous mobile robots: a case study. In: Proc. of the 12th IEEE Conference on Emerging
Technologies and Factory Automation, ETFA2007, Greece (2007) 973–980
3. Neves, A. J. R., Pinho, A. J., Martins, D. A., Cunha, B.: An efficient omnidirectional vision
system for soccer robots: from calibration to object detection. Mechatronics (2010 (in press))
4. Silva, J., Lau, N., Neves, A. J. R., Rodrigues, J., Azevedo, J. L.: World modeling on an MSL
robotic soccer team. Mechatronics (2010 (in press))
5. Lau, N., Lopes, L. S., Corrente, G., Filipe, N., Sequeira, R.: Robot team coordination using
dynamic role and positioning assignment and role based setplays. Mechatronics (2010 (in
press))
6. van der Zant, T., Wisspeintner, T.: Robocup x: A proposal for a new league where robocup
goes real world. In Bredenfeld, A., Jacoff, A., Noda, I., Takahashi, Y., eds.: RoboCup 2005:
Robot Soccer World Cup IX. Volume 4020 of Lecture Notes in Computer Science., Springer
(2005) 166–172
7. van der Zant, T., Wisspeintner, T.: Robocup@home: Creating and benchmarking tomorrows
service robot applications. In Lima, P., ed.: Robotic Soccer, Vienna: I-Tech Education and
Publishing (2007) 521–528
8. Almeida, L., Santos, F., Facchinetti, T., Pedreiras, P., Silva, V., Lopes, L. S.: Coordinating
distributed autonomous agents with a real-time database: The cambada project. In Aykanat,
C., Dayar, T., Korpeoglu, I., eds.: ISCIS. Volume 3280 of Lecture Notes in Computer Sci-
ence., Springer (2004) 876–886
59

9. Moradi, H., Choi, J., Kim, E., Lee, S.: A real-time wall detection method for indoor envi-
ronments. In: IROS. (2006) 4551–4557
10. Lauer, M., Lange, S., Riedmiller, M.: Calculating the perfect match: An efficient and accurate
approach for robot self-localization. In Bredenfeld, A., Jacoff, A., Noda, I., Takahashi, Y.,
eds.: RoboCup. Volume 4020 of Lecture Notes in Computer Science., Springer (2005) 142–
153
11. Riedmiller, M., Braun, H.: A direct adaptive method for faster backpropagation learning: the
rprop algorithm. In: Proceedings of the IEEE International Conference on Neural Networks.
(1993) 586–591
12. Koenig, S., Likhachev, M.: D* Lite. In: Proceedings of the AAAI Conference of Artificial
Intelligence (AAAI), Alberta, Canada (2002) 476–483
13. Wurm, K. M., Hornung, A., Bennewitz, M., Stachniss, C., Burgard, W.: OctoMap: A prob-
abilistic, flexible, and compact 3D map representation for robotic systems. In: Proc. of the
ICRA 2010 Workshop on Best Practice in 3D Perception and Modeling for Mobile Manipu-
lation, Anchorage, AK, USA (2010) Software available at http://octomap.sf.net/.
14. Bohus, D., Raux, A., Harris, T. K., Eskenazi, M., Rudnicky, A. I.: Olympus: an open-source
framework fro conversational spoken language interface research. In: proceedings of HLT-
NAACL 2007 workshop on Bridging the Gap: Academic and Industrial Research in Dialog
Technology. (2007)
15. Bohus, D., Rudnicky, A. I.: The ravenclaw dialog management framework: Architecture and
systems. Computer Speech & Language 23 (2009) 332–361
16. Thrun, S., Burgard, W., Fox, D.: Probabilistic Robotics. The MIT Press (2005)
17. Thrun, S., Fox, D., Burgard, W., Dellaert, F.: Robust monte carlo localization for mobile
robots. Artif. Intell. 128 (2001) 99–141
60
