
LEARNING PEG-IN-HOLE ACTIONS WITH FLEXIBLE OBJECTS
Leon Bodenhagen
1
, Andreas R. Fugl
1,2
, Morten Willatzen
2
, Henrik G. Petersen
1
and Norbert Kr
¨
uger
1
1
Maersk McKinney Moller Institute, University of Southern Denmark, Campusvej 55, 5230 Odense, Denmark
2
Mads Clausen Institute, University of Southern Denmark, Alsion 2, 6400 Sønderborg, Denmark
Keywords:
Peg-in-Hole, Flexible objects, Action learning.
Abstract:
This paper presents a method for learning Peg-In-Hole actions with flexible objects. To learn the actions we
parametrize the entire trajectory by a single point and use Kernel Density Estimation to reflect the different
variations of the action and the object characteristics. The object is characterized by its elastic behaviour rather
than geometric properties. Thereby an action learned for one object can be transferred to a new object that
behaves similarly although it might have different elastic properties, dimensions and geometries. To bootstrap
the learning mechanism, the system performs simulated actions and utilizes the detailed information obtained
from the simulation environment. Subsequently Peg-In-Hole actions are tested successfully on the real life
setup.
1 INTRODUCTION
Humans can perform a huge variety of different and
apparently simple tasks, but often such tasks are diffi-
cult for robots to perform. The Peg-In-Hole problem
is one of these tasks and has been studied in numer-
ous works with different perspectives and objectives,
often as an example of an assembly task.
One of the aspects investigated is for instance, in
addition to the insertion of the peg, the exact align-
ment of the peg with the hole (Bruyninckx et al.,
1995). Assuming that the shape of both the (rigid) peg
and the hole is known, the contact forces during the
operation can be predicted (Meitinger and Pfeiffer,
1996) and used to optimize the action. More recent
approaches often focus on sub-aspects of the classic
Peg-In-Hole task. Elastic contacts have for instance
been utilized in (Xia et al., 2006) to avoid wedging.
However, to our knowledge only little work has
been done with flexible objects in the context of Peg-
In-Hole operations or assembly tasks in general (see
also (Jim
´
enez, 2011)). In (Villarreal and Asada, 1991)
the concept of flexible objects has been used to model
finite collision forces between the object and the rim
of the hole and thereby aid the motion planning by
providing it a “buffer“, but in general the shape is
considered to stay roughly constant. Path planning
with simple, flexible 3D objects like tubes that change
their shape during operation are done by (Anshelevich
et al., 2000). They model the objects by mass-spring
models and perform a random search for the path with
the minimal energy. Such an approach is however
not feasible when a variety of non-trivial 3D shapes
is considered.
In general it is intractable to model and plan the
entire action when the deformation of the object has
to be considered during the action, therefore this pa-
per investigates an approach that avoids heavy online
calculations. Furthermore a classic force-torque sen-
sor can hardly be utilized as any contact will, in addi-
tion to measurable forces, cause a deformation of the
object - hence standard approaches used for Peg-In-
Hole actions with rigid objects cannot be applied.
In this paper we propose a system that learns how
to perform the Peg-In-Hole operation with flexible
objects (see Figure 1). The learning mechanism has
only little prior knowledge about the object; instead
the learning utilizes a physical modelling from the
elastic properties of the object. The elastic behaviour
is derived from calculating the deformation of the bot-
tom surface in the object. By this surface the ob-
ject is implicitly deformed in the learning stage. This
allow us to handle non-trivial 3D shapes in a low-
dimensional way. Further a learned action can be
transferred to a similar but not necessarily identical
object. This leads to a system that can perform in real
time as the demand for servoing or online modelling
becomes minimized, assuming that most objects in
e.g. a production scenario indeed are similar.
The overall system that forms the context for the
624
Bodenhagen L., R. Fugl A., Willatzen M., G. Petersen H. and Krüger N..
LEARNING PEG-IN-HOLE ACTIONS WITH FLEXIBLE OBJECTS.
DOI: 10.5220/0003882806240631
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (SSIR-2012), pages 624-631
ISBN: 978-989-8425-95-9
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

action learning is outlined in section 2 and the applied
methodology is described in section 3. Section 4 sum-
marizes the experiments that have been done in order
to investigate the usability of the suggested approach.
2 SYSTEM SETUP
The overall system, presented in more detail in (Jordt
et al., 2011), corresponds to a short production line:
Objects are transported by a conveyor belt, a 3D scan
of the travelling object provides a 3D triangular mesh
of the object. Assuming that the material properties
are known, the elastic behaviour of the object is mod-
elled. At the end of the conveyor this knowledge is
used to grasp the object. Subsequently an additional
action can be performed. The Peg-In-Hole operation
is investigated in this paper as it has been considered
to be characteristic for many tasks where some sort of
object is inserted into a machine in order to be pro-
cessed.
This paper (in contrast to (Jordt et al., 2011)) fo-
cuses primarily on the modelling of deformations as
well as the learning of Peg-In-Hole actions. The robot
arm with an 1-degree of freedom gripper attached is
shown on Figure 1 with a close-up of a Peg-In-Hole
operation.
Figure 1: The physical setup used for the experiments.
3 METHODS
In the following a detailed overview of the compo-
nents which this papers focuses on is given. The mod-
elling of the deformations of objects is described in
section 3.1, in section 3.2 the physical modelling is
condensed into a feature vector and the formalization
and learning of actions is defined in section 3.3.
3.1 Deformation Modelling
Deformation modelling in the context of Peg-In-Hole
operations, is concerned with modelling the flexible
objects in the scene and solving for their behaviour.
We restrict the problem to the situation of the peg be-
ing substantially more flexible than other objects in
the scene. Thus the boundary of the plate, defining
the hole for insertion is assumed to be a rigid body, as
are the jaws of the robot gripper grasping the peg.
For the flexible peg we want to determine the me-
chanical response, i.e. how do material points in the
peg change as a function of time and external influ-
ences (modelled as forces). We assume the elastic
parameters such as stiffness and mass density to be
available with reasonable accuracy.
In the following, the approach to model deforma-
tion for the purpose of learning Peg-In-Hole actions
will be outlined.
3.1.1 Deformation Description
Let x be a material point in the undeformed object.
The object deforms and the new position of the point
after deformations are added is x
0
. The displacement
vector for some point is thus u = x
0
− x , or in compo-
nent form:
u
i
= x
0
i
− x
i
(1)
where i = 1,2,3 refers to the x,y,z components. The
displacement vector is a dense and very general de-
scription as it explicitly provides the deformation of
every material point in the flexible object. How-
ever directly using the deformation vector of material
points for the parametrization of general 3D objects
becomes prohibitively expensive. For the purpose of
reducing the time required for sampling when learn-
ing Peg-In-Hole actions with flexible objects, it is cru-
cial to have a sparse but still accurate representation
of a deformed surface.
(Samareh et al., 1999) reviewed several shape
parametrization techniques, including discrete, poly-
nomial and spline representations. Their goal was to
investigate the applicability of the techniques to de-
scribe aircraft airfoils with the minimum amount of
LEARNING PEG-IN-HOLE ACTIONS WITH FLEXIBLE OBJECTS
625
parameters. This is important for the purpose of au-
tomatic optimization, where the shape of the wing is
deformed in small increments to find the best possible
aerodynamic design. In this process a large parame-
ters space must be searched, and thus having a small
amount of parameters is crucial for the feasibility of
the approach.
The parametrization by the discrete approach cor-
responds to sampling the displacement vector at regu-
lar intervals at the boundary. It is the most straightfor-
ward method, and can approximate any shape. How-
ever as (Samareh et al., 1999) points out, this degree
of freedom is rarely useful due to the inherent smooth-
ness of many objects. For instance smooth, curving
features will require many discrete points and accord-
ingly the number of parameters can increase to unac-
ceptable sizes.
Parametrization by polynomia and splines on the
other hand exploits the smoothness of the original
shape. For smooth shapes they will reduce the number
of parameters considerably. The non-uniform ratio-
nal B-spline, NURBS (Piegl and Tiller, 1997), is best
suited for handling a large set of shapes, including an-
alytical shapes such as cylinders, cones and scanned
unstructured 3D data (Samareh et al., 1999; Bardinet
et al., 1995).
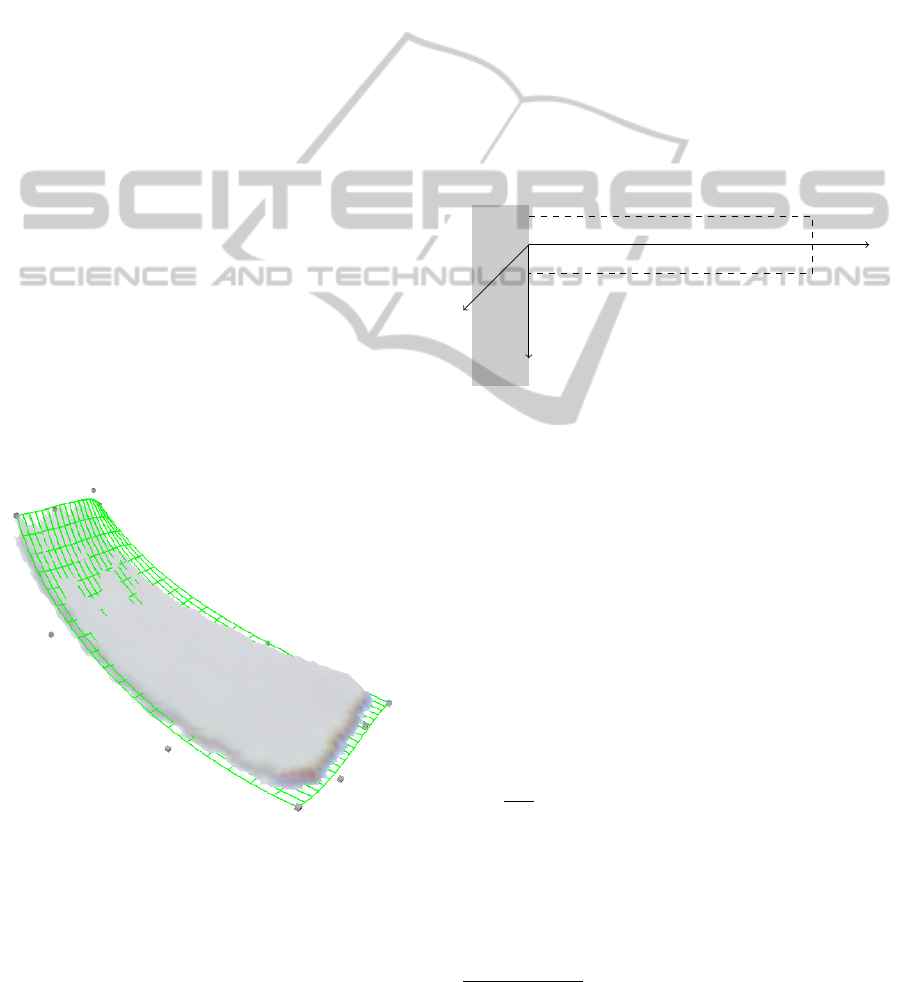
As demonstrated by (Jordt et al., 2011) a real-
time tracking of a detailed 3D mesh, using depth and
colour video from a Kinect camera, can be coupled to
a low-dimensional NURBS surface, see Figure 2.
Figure 2: A scanned 3D mesh of an object and its associ-
ated NURBS surface (Figure courtesy of (Jordt et al., 2011),
with kind permission by the authors).
Similarly we decouple the geometry from the de-
formation. Only the deformation of the control points
in the NURBS surface is used as a a parameter in the
learning stage.
The deformation modelling is thus reduced to the
problem of finding the deformation for the control
points of the NURBS surface. When at some point
the whole surface deformed geometry is needed (for
instance for collision detection), it is derived from the
deformed control points. Having a deformation that
models to the NURBS surface also enables easier cou-
pling to the NURBS based deformation tracking.
3.1.2 Choice of Model
The Bernoulli-Euler (BE) beam theory has since its
development in the 18th century, been a core element
in structural engineering. Its’ formulation and param-
eters are readily understandable, and many problems
have analytical solutions. It is a simple model how-
ever, as it only accounts for the bending moment and
lateral displacement of the beam.
x
z
y
fixed end
free end
Figure 3: A cantilevered beam.
Several additional models have been developed
during the years to improve on the BE model. Most
noteworthy of these is the Timoshenko model (Timo-
shenko, 1921), which takes into the account both ro-
tation inertia and shear deformation.
To account for the additional effects, the Timo-
shenko model adds a dependent variable to account
for the angular displacement and a parameter known
as the shape factor. The shape factor is a function of
Poisson’s ratio for the material, the wave frequency
and the shape of the cross section. For the static case,
the shape of the cross section is the most dominant
effect on the shape factor
1
.
The slenderness ratio is the ratio of the beam
length to the radius of gyration, calculated as
L/
p
I/A. It characterizes the magnitude of differ-
ent forces involved in the beam equations. In the
work of (Seon M. Han, 1999) they recommend the
use of the simple BE model for large slenderness ra-
tios (s > 100), and the Timoshenko model for smaller
ratios where second order effects of rotation and shear
become important.
1
Poisson’s ratio varies for normal materials only be-
tween 0 and 0.5 (Landau et al., 1986).
ICAART 2012 - International Conference on Agents and Artificial Intelligence
626

For our present experiments, we target moderately
slender objects (100 < s < 150). Accordingly we use
the BE beam theory.
3.1.3 Bernoulli-Euler Beam Theory
The governing equation for the dynamic BE beam can
be formulated as a partial differential equation in the
deflection w of the beam
∂
2
∂x
2
EI
∂
2
w
∂x
2
= −µ
∂
2
w
∂t
2
+ q (2)
where w(x,t) is the deflection as a function of position
x on the beam and time t. E is Young’s modulus, I is
the second moment of inertia and q the is body load.
Young’s modulus, E is a material dependent pa-
rameter and represents the stiffness of the material.
It may be either measured or derived from tabulated
data. For homogeneous materials it is a constant.
The second moment of inertia, I is a geometry de-
pendent parameter, quantifying resistance to bending
at a given cross section. It is defined as I =
R
A
z
2
dA,
where z is the height of the cross section, being per-
pendicular to the bending. For a geometry that has a
constant cross section (e.g. a simple beam) it is a con-
stant. For the special case of a rectangular cross sec-
tion with height h and width b, I is equal to bh
3
/12.
This suggests a strong dependence of the thickness of
such a beam, to the resulting deformation, i.e. varying
the thickness will give the strongest resulting change.
The body load, q represents an external force act-
ing upon the beam. It is defined as a force per unit
length. Point forces may be modelled with the use of
the Dirac delta function.
For the static case of a homogeneous beam with
constant cross section, Equation 2 reduces to the or-
dinary differential equation (ODE)
EI
d
4
w
dx
4
= q(x) (3)
where w(x) is the deflection now only as a function of
position, and E and I are both constants.
The static beam equation, Equation 3 is a fourth-
order ODE. In order to find a unique solution for
the deformation profile w(x), four boundary condi-
tions must be prescribed. Assuming that the gripper
is placed such that the left end of the object at x = 0 is
fixed in space (both deflection and slope equal to zero)
we have the boundary conditions for the clamped end
w|
x=0
= 0 ;
∂w
∂x
x=0
= 0 (4)
For the other end of the object at x = L, we pre-
scribe the boundary conditions (both the bending mo-
ment and the shear force in the beam is zero) corre-
sponding to that this part of the object is free to move
∂
2
w
∂x
2
x=L
= 0 ;
∂
3
w
∂x
3
x=L
= 0 (5)
The ODE Equation 3 together with the boundary
conditions Equation 4 and Equation 5 form a bound-
ary value problem. The solution gives the deflection
of a fixed-free/cantilevered beam, as depicted on Fig-
ure 3.
This boundary value problem, along with the re-
striction that the load is uniformly distributed i.e.
q(x) = constant, has the analytical solution to the de-
flection w(x) of the beam
w(x) =
qx
2
(6L
2
− 4Lx + x
2
)
24EI
(6)
3.2 Object Description
One aim of the action learning is to be able to apply
an action learned with one object to another object
that behaves similarly. The behaviour of an object is
considered to be defined by the deformation that oc-
curs when a specific grasp is applied and the object is
affected by gravity - these deformations can be mod-
elled as outlined in section 3.1.
In the following the condensation of the high-
dimensional information that is intrinsic to the defor-
mation modelling into a feature vector of lower di-
mensionality is described. Ideally two different ob-
jects, e.g. with different shapes, maps to the same
feature vector if they behave identically, such that the
same action can be applied.
In order to achieve a feature-vector that is compa-
rable across objects, the NURBS surfaces describing
the undeformed object S
u
(u,v) and the object in a hor-
izontal orientation, affected by gravity S
d
(u,v). The
length of the objects is normalized.
The difference between the two surfaces describes
how much the object has deformed at the individual
locations:
ˆ
S(u,v) = S
u
(u,v) −S
d
(u,v) (7)
Based on a regular grid g of size I × J, the defor-
mations are obtained at a set of discrete locations and
for a feature vector f :
f =
k
ˆ
S (g
00
)k,...,k
ˆ
S(g
i j
)k,....,k
ˆ
S(g
IJ
)k
(8)
where g
i j
refers to the a point of the grid at the posi-
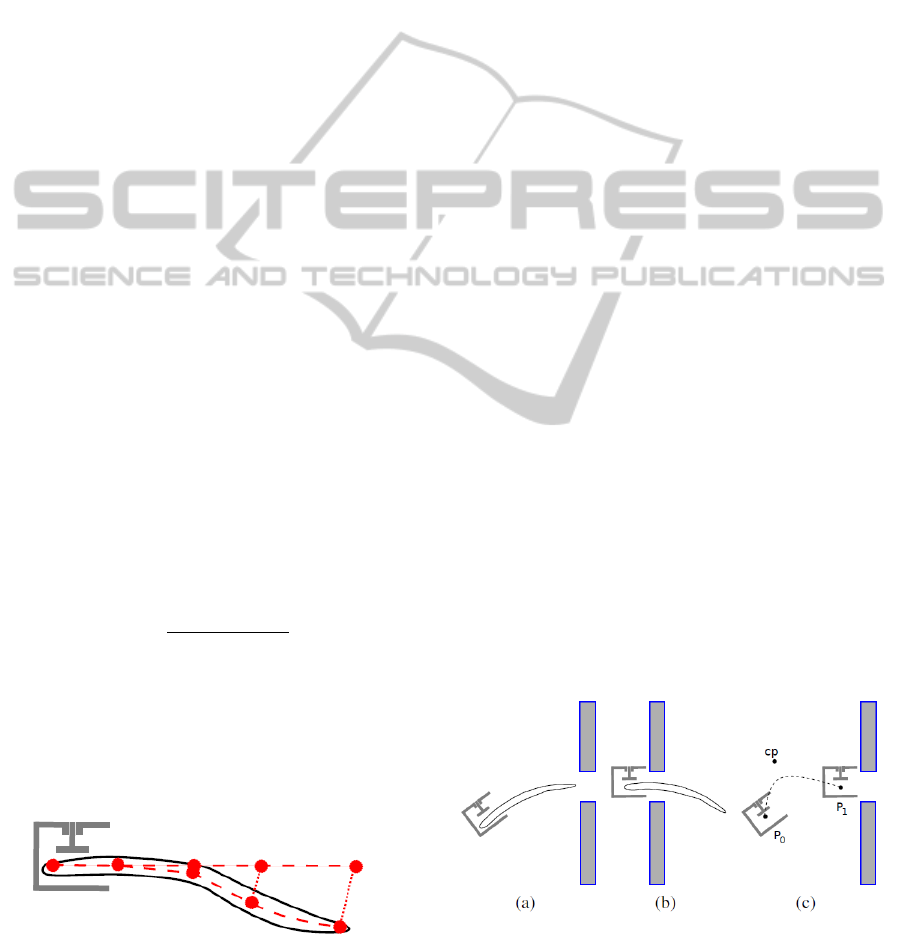
tion (i, j). An simplified example for the calculation
of f is shown in Figure 4. It correspond to a deflect-
ing beam where the deflections can be described by a
NURBS curve instead of an entire surface.
LEARNING PEG-IN-HOLE ACTIONS WITH FLEXIBLE OBJECTS
627
3.3 Action Learning
The exact 6D trajectory of a Peg-In-Hole operation
depends both on the elastic behaviour of the object,
the grasp applied to the object and the shape of the
object. However, although the 6D trajectory for in-
stance varies with the size of the object, it might still
share similarities with other Peg-In-Hole actions. The
parametrization of the action aims to reduce the com-
plexity of the learning problem and eases the transfer
of a learned action from one object to another as the
object does not need to be identical, but only to share
certain properties. The following sections cover the
parametrization of Peg-In-Hole actions as well as the
structure and strategy for learning them.
3.3.1 Action Parametrization
The Peg-In-Hole action is defined by a trajectory
which the robot executes. The endpoint P
1
is known
as it is directly in front of the hole. The startpoint P
0
is obtained online utilizing the deformation prediction
and ensures that the end of the object is horizontal and
in front of the hole (see Figure 5). The trajectory from
the start to the endpoint is considered to be approxi-
mated by a curve defined by two-dimensional trans-
lations and one-dimensional rotations. The points P
0
and P
1
are therefore both points in R
2
× SO(2).
The curve P(t) is defined using a rational B
´
ezier-
curve (Piegl and Tiller, 1997) based on three control
points: the start and endpoint as well as one additional
controlpoint which will be obtained by learning:
P(t) = P
0
+ B(t)(P
1
− P
0
) for t ∈ [0; 1] (9)
with
B(t) =
∑
n
i=0
b
i,n
(t)P
i
w
i
∑
n
i=0
b
i,n
(t)w
i
(10)
where b
i,n
(t) is the Bernstein polynomial with n = 2
and P
i
refers to the i’th controlpoint for the curve:
P
i
∈ {0, cp,1} (11)
Figure 4: Illustration of the differences between the unde-
formed mesh (straight dashed line) and the deformed mesh
(bent dashed line) used for the feature vector in a 2D case.
The resulting feature vector will be 5-dimensional.
The weights are fixed, w = [1,2,1], which ensures
that the second control point, cp, has an increased im-
pact. Thereby also motions that lead to a significant
overshoot can be learned.
Note that the control points do not depend on the
scale of the motion or the object (see Equation 9).
Therefore a learned control point will lead to mean-
ingful trajectories for any object, although it is not
guaranteed that the performed action will be success-
ful.
3.3.2 Action Learning Framework
The set of potentially successful Peg-In-Hole actions
is modelled using Kernel Density Estimation (Silver-
man, 1986). Every time a control point that leads to a
successful action has been obtained, it is added to the
density d. However, contrary to the situation in (De-
try et al., 2011) where grasp affordances are learned
for a specific object, we cannot assume the objects to
be identical. Therefore a kernel, K
µ,σ
(cp, f ), which is
a compound of two kernels is used: one reflecting the
Peg-In-Hole action as such, the other reflecting the
object features specified in section 3.2.
K
µ,σ
(cp, f ) = N
PiH
µ
p
,σ
p
(cp)N
Ob ject
µ
o
,σ
o
( f ) (12)
where N
PiH
and N
Ob ject
are isotropic multivariate
Gaussian kernels located at the mean positions µ
p
resp. µ
o
and with bandwidth of σ
p
resp. σ
o
. The
density is given by a weighted sum of the m kernels:
d(cp, f ) =
m
∑
i=0
w
i
K
µ
i
,σ
(cp, f ) (13)
where the weights w
i
ensure that the density integrates
to one, hence
∑
m
i
w
i
= 1.
During the learning every controlpoint that leads
to a successful action will contribute to the density
Figure 5: Illustration of (a) starting configuration P
0
and
(b) target configuration P
1
for the Peg-In-Hole action. (c)
shows a projection of the 3D trajectory based on P
0
, P
1
and
the controlpoint cp.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
628

with one particle. Assuming that an action is either
successful or not, all particles of the density have
equal weights. Given an uniformly sampled search
space, the value of the density at a given point will
be proportional to the likelihood of the corresponding
action for being successful.
Here, we choose the points for the feature vector
f as those illustrated in Figure 4. It should be no-
ticed that the point P
0
is scaled with respect to object
length (see Figure 4). Thus, two objects with differ-
ent lengths having the same feature vector then have
equivalent shapes and may be handled in the same
way except for choosing the appropriate length scaled
P
0
. Thus, the parameters cp and f covers a given con-
trol point and shape for all object lengths.
Assume now that we wish to solve a Peg In Hole
action for a hitherto unstudied object. The deflection
model is then used to compute the feature vector f
O
.
Then the control point with the highest probability for
success can be obtained by searching for the maxi-
mum of the density d(cp, f
O
).
3.3.3 Action Learning Strategy
The system is not provided with any prior knowledge
to bootstrap the learning strategy. Therefore a 2-step
learning mechanism has been considered. First, an
exhaustive search on the controlpoints is performed
in a simulated environment. As the controlpoints are
3-dimensional it is feasible to explore the space with
a reasonable resolution. The outcome of the sim-
ulated experiments leads to a density as defined in
Equation 13. Examples for the clouds of particles are
shown in Figure 7. Finally, the density achieved by
simulation can be sampled and evaluated on the real-
world setup, leading to a new density.
Utilizing a simulator does not only allow the eval-
uation of large set of experiments, it also provides a
detailed feedback about the performed action. The
outcome of an experiment is therefore not only a bi-
nary, namely success or failure, but also the minimal
clearance c between the object and rim of the hole that
is experienced during the individual experiment. A
bigger clearance implies that the action is more robust
to external disturbances and modelling errors. This
fact is reflected by the weights:
w
i j
=
1
N
c
i j
∑
M
j=0
c
i j
(14)
where c
i j
is the minimal clearance of the j’th out of M
successful experiments with the i’th object, given N
objects in total. Thereby the maximum of the density
does not only reflect the success likelihood, based on
the statistics of the samples, but directly corresponds
Figure 6: Approximation of a flexible object using a rigid
device. Self-collisions within the simplified object model
are ignored.
to the action that is expected to be the most robust in
the given situation.
4 EXPERIMENTS
In the following the simulated experiments used to
bootstrap the learning are described in section 4.1.
Experiments on the real setup are described in section
4.2.
The test specimens are cuboid pieces of silicone
rubber, cut from a sheet of 2.0 mm thickness, into
pieces of 15 mm width. The density of the silicone
sheet as given by the manufacturer is 1.15 g/cm
3
and
the shore A hardness is 60 ± 5 (which corresponds to
a Young’s modulus of approximately 3.6 MPa).
4.1 Simulated Experiments
For the simulation, based on a simulation environ-
ment from (Ellekilde and Jørgensen, 2010), a flexi-
ble, cuboid object is approximated by a rigid device
consisting of a set of consecutive boxes as illustrated
in Figure 6. This approximation allows for efficient
collision detections as well as clearance calculations
- the precision can be controlled easily by adjusting
the number of joints in the device. The angles of the
joints connecting the boxes are obtained from the ob-
ject deformation modelling which takes the orienta-
tion of the grasped object with respect to gravity into
account.
Table 1: Overview over the different outcomes experienced
in the simulator.
Minimal clearance [mm]
Object collision 0 - 2 2 - 4 4 <
80 mm long 6899 258 288 555
60 mm long 4711 416 524 2349
40 mm long 3418 678 1267 2637
LEARNING PEG-IN-HOLE ACTIONS WITH FLEXIBLE OBJECTS
629

Simulations have been done for three different ob-
jects, testing Peg-In-Hole actions for each object with
8000 controlpoints. The outcomes of the experiments
(summarized in Table 1) indicate that it is easier to
insert short objects rather than long ones: a higher
proportion of all actions succeeded and the average
minimal clearance of the succeeding actions is larger.
This has been expected as long objects lead to large
deflections and can thus not be inserted by a close to
straight-line motion in contrast to short objects.
All controlpoints learned for the short resp. long
object are shown in Figure 7. In both cases the so-
lutions form a close to convex area which indicates
that the complete density can be approximated with a
sparse density consisting of fewer particles, but with
larger bandwidths. As the costs of the search for a
maximum within the density depend on the number
particles that need to be evaluated, densities based on
fewer particles ease the implementation of a real-time
system.
Figure 7: Illustration of the 3D point clouds of the control-
points that lead to successful actions for the (a) 40 mm long
object and (b) the 80 mm long object.
4.2 Real Experiments
In the following the validity of the modelled deflec-
tions as well as the learned Peg-In-Hole actions are
assessed by real-world experiments.
4.2.1 Deformation Validation
To validate the modelling, the maximum deformation
of each test object have been measured in a separate
experimental setup.
For the test objects of 80,60 and 40 mm, the mean
values for the deformations are respectively 29.25,
10.25 and 2.25 mm. Using the tabulated shore A
hardness of 60 for the silicone rubber (correspond-
ing Young’s modulus 3.6 MPa), the deformation is
overestimated. This trend is clear for the larger de-
formations of the piece 80 mm in length. Using an
extrema of the hardness, shore A 65 (Young’s mod-
ulus 4.4 MPa) the maximum calculated deflection of
Table 2: The maximum deflection of the respective test
objects. The last column shows the deformation as calcu-
lated by the modelling, assuming a shore A hardness of 60.
For each object, 4 different orientations have been indepen-
dently measured.
Measured max. deflection [mm]
Object
O1 O2 O3 O4
Sim.
80 mm
29 28 30 30
33.5
60 mm
10 10 10 11
10.5
40 mm
2 2 3 2
2.5
the piece reduces to 28.3 mm, which is closer to the
observed mean of 29.25 mm.
4.2.2 Peg-in-Hole Actions
Based on the results of the simulated experiments,
Peg-In-Hole actions with the simulated objects have
been evaluated on the real setup. The controlpoints
have been obtained by searching the density obtained
by simulation for a maximum. The resulting actions
have been observed to be successful, the last step of
the insertion of the longest object is shown on Fig-
ure 1. However manual measurements of the mini-
mal clearance have been done in order to investigate
the robustness of the learned actions. Especially for
the longest object, the clearance has been observed to
be approximately 1 mm (for the 80 mm long object)
which is lower than expected according to results in
Table 1.
A potential reason for smaller clearance might be
caused by alignment errors between the grasped ob-
ject and the hole as even small errors seam to have a
significant effect. Further the most significant differ-
ence between measured and expected clearance has
occurred for the 80 mm long object, which might be
correlated with the fact that the deflection modelling
for this object had the bigger error than the others (see
Table 2).
5 FUTURE WORK
The overall system discussed so far is, as no sen-
sor input is used to correct for modelling errors, an
open-loop system. However, when the complete sce-
nario is considered where an object becomes scanned,
modelled, grasped and inserted multiple error sources
arise. If the object-relative location of the grasp is sig-
nificantly different than expected, this would have an
impact on the modelling and might cause the Peg-In-
Hole action to fail.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
630

To counteract potential errors an additional Kinect-
camera is introduced, enabling the system to super-
vise the Peg-In-Hole operation. We foresee that the
additional feedback can be used to:
• Improve the deflection modelling over time.
• Correct for inaccuracies during the grasping.
• Correct the starting position of the Peg-In-Hole
action.
6 DISCUSSION
In this paper we presented a system to perform Peg-
In-Hole action with flexible objects. The system uti-
lizes a physical modelling of the elastic behaviour of
the objects and an action learning mechanism based
on kernel density estimation. Objects are identified by
a distinctive feature vector that enables the system to
recognize objects with similar behaviours as known
objects. Thereby previously learned actions can be
applied to new objects, with similarly behaviour as
known ones. This enables the system to perform in
real time as the demand for time consuming mod-
elling operations is minimized.
ACKNOWLEDGEMENTS
This work was co-financed by the INTERREG 4 pro-
gram Syddanmark-Schleswig-K.E.R.N. by EU funds
from the European Regional Development Fund. The
presented work has also received funding from the EU
Seventh Framework Programme under grant agree-
ment no. 270273, Xperience.
REFERENCES
Anshelevich, E., Owens, S., Lamiraux, F., and Kavraki,
L. E. (2000). Deformable volumes in path planning
applications. In IEEE International Conference on
Robotics and Automation.
Bardinet, E., Cohen, L. D., and Ayache, N. (1995). A para-
metric deformable model to fit unstructured 3d data.
Bruyninckx, H., Dutr
´
e, S., and Schutter, J. D. (1995). Peg-
on-hole: A model based solution to peg and hole
alignment. In International Conference on Robotics
and Automation.
Detry, R., Kraft, D., Kroemer, O., Bodenhagen, L., Peters,
J., Kr
¨
uger, N., and Piater, J. (2011). Learning grasp
affordance densities. Paladyn Journal of Behavioral
Robotics, 2:1–17.
Ellekilde, L.-P. and Jørgensen, J. A. (2010). RobWork: A
Flexible Toolbox for Robotics Research and Educa-
tion. In International Symposium on Robotics,
Jim
´
enez, P. (2011). Survey on model-based manipula-
tion planning of deformable objects. Robotics and
Computer-Integrated Manufacturing, In Press.
Jordt, A., Fugl, A. R., Bodenhagen, L., Willatzen, M.,
Koch, R., Petersen, H. G., Andersen, K. A., Olsen,
M. M., and Kr
¨
uger, N. (2011). An outline for an in-
telligent system performing peg-in-hole actions with
flexible objects. In The International Conference on
Intelligent Robotics and Applications (Accepted).
Landau, L. D., Pitaevskii, L. P., Lifshitz, E. M., and Kose-
vich, A. M. (1986). Theory of Elasticity. Butterworth-
Heinemann.
Meitinger, T. and Pfeiffer, F. (1996). The spatial peg-in-
hole problem. In Proceedings of the Second World
Automation Congress, Montpellier, France.
Piegl, L. and Tiller, W. (1997). The NURBS book. Springer-
Verlag New York, Inc., New York, NY, USA, 2. edi-
tion.
Samareh, J. A., Samareh, J. A., and Polynomial, B. B.
(1999). A survey of shape parameterization tech-
niques.
Seon M. Han, Heym Benaroya, T. W. (1999). Dynamics of
transversely vibrating beams using four engineering
theories. Journal of Sound and Vibration, 225:935–
988.
Silverman, B. W. (1986). Density Estimation for Statistics
and Data Analysis. Chapman and Hall/CRC.
Timoshenko, S. P. (1921). On the correction for shear of
the differential equation for transverse vibrations of
prismatic bars. Philosophical Magazine, 41:744–746.
Villarreal, A. and Asada, H. (1991). A geometric rep-
resentation of distributed compliance for the assem-
bly of flexible parts. In International Conference on
Robotics and Automation.
Xia, Y., Yin, Y., and Chen, Z. (2006). Dynamic analysis for
peg-in-hole assembly with contact deformation. In-
ternational Journal of Advanced Manufacturing Tech-
nologies, 30:118–128.
LEARNING PEG-IN-HOLE ACTIONS WITH FLEXIBLE OBJECTS
631
