
REFLEXIVE COLLISION RESPONSE WITH VIRTUAL SKIN
Roadmap Planning Meets Reinforcement Learning
Mikhail Frank, Alexander F
¨
orster and J
¨
urgen Schmidhuber
Dalle Molle Institute for Artificial Intelligence (IDSIA), CH-6928 Manno-Lugano, Switzerland
Facolt
`
a di Scienze Informatiche, Universit
`
a della Svizzera Italiana, CH-6904 Lugano, Switzerland
Dipartimento Tecnologie Innovative, Scuola Universitaria Professionale della Svizzera Italiana
CH-6928 Manno-Lugano, Switzerland
Keywords:
Roadmap planning, Reinforcement learning, Collision avoidance, Robotics framework.
Abstract:
Prevalent approaches to motion synthesis for complex robots offer either the ability to build up knowledge
of feasible actions through exploration, or the ability to react to a changing environment, but not both. This
work proposes a simple integration of roadmap planning with reflexive collision response, which allows the
roadmap representation to be transformed into a Markov Decision Process. Consequently, roadmap planning
is extended to changing environments, and the adaptation of the map can be phrased as a reinforcement learn-
ing problem. An implementation of the reflexive collision response is provided, such that the reinforcement
learning problem can be studied in an applied setting. The feasibility of the software is analyzed in terms of
runtime performance, and its functionality is demonstrated on the iCub humanoid robot.
1 INTRODUCTION
Currently available industrial robots are employed to
do repetitive work in structured environments, and
their highly specialized nature is therefore unprob-
lematic, or even desirable. However the next gener-
ation of robot helpers is expected to tackle a much
wider variety of applications, working alongside peo-
ple in homes, schools, hospitals, and offices. The
hardware exists already. State-of-the-art humanoid
robots such as the NASA/GM Robonaut 2 (Diftler
et al., 2011), the Willow Garage Personal Robot 2
(http://www.willowgarage.com), the iCub from the
Italian Institute of Technology (IIT) (Metta et al.,
2008), and Toyota’s Partner Robots (Takagi, 2006;
Kusuda, 2008) are impressive machines with many
degrees of freedom (DOFs). Physically speaking,
they should be capable of doing a much wider va-
riety of jobs than their industrial ancestors. Behav-
iors however are still programmed manually by ex-
perts and the resulting programs are generally engi-
neered to solve a particular instance (or at best a set of
related instances) of a task. Consequently, these ad-
vanced robots are endowed with relatively few, highly
specialized control programs, and their versatility re-
mains quite limited.
In order to realize the potential of modern hu-
manoid robots, especially with respect to service in
unstructured, dynamic environments, we must find
a way to improve their adaptiveness and exploit the
versatility of modern hardware. This will undoubt-
edly require a broad spectrum of behaviors that are
applicable under a variety of environmental con-
straints/configurations. At the highest level, the ver-
satile agent/controller must solve a variety of differ-
ent problems by identifying relevant constraints and
developing or invoking appropriate behaviors. How-
ever we, as engineers and programmers, are not likely
to be able to explicitly and accurately predict the
wide range of constraints and operating conditions
that will be encountered in homes, schools, hospi-
tals, and offices, where the next generation of robots
should serve. This is one motivation for the develop-
mental approach to robotics, which focuses on sys-
tems that adaptively and incrementally build a reper-
toire of actions and/or behaviors from experience.
To effectively learn from experience, an
agent/controller must explore. However given
the fragility of robotic hardware, exploratory be-
havior can be quite hazardous. Self-collision and
collision with fixed objects in the environment
usually lead to calibration problems and/or broken
components, both of which require time-consuming
maintenance efforts that interrupt experimentation.
For these reasons, implementing exploratory be-
havior in simulation is an appealing alternative to
the real world. In fact this is the approach favored
in most of the path planning literature, which fo-
642
Frank M., Förster A. and Schmidhuber J..
REFLEXIVE COLLISION RESPONSE WITH VIRTUAL SKIN - Roadmap Planning Meets Reinforcement Learning.
DOI: 10.5220/0003883206420651
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (SSIR-2012), pages 642-651
ISBN: 978-989-8425-95-9
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

cuses primarily on off-line search for feasible mo-
tions that interpolate a starting configuration and a
goal configuration. Many such planning algorithms
offer desirable theoretical properties, such as proba-
bilistic completeness. However, the configuration of
the workspace/environment must not change between
the simulated synthesis and validation of a motion
and the execution of the motion by hardware. Since
the static environment assumption does not usually
hold in the real world, the practical applicability of
most path planning algorithms outside the laboratory
is quite limited.
Exploratory behavior can of course be imple-
mented on hardware, provided that there exists an on-
line monitoring mechanism to prevent harmful col-
lisions. Such a system must identify infeasible mo-
tions and revise them in real-time. Run-time perfor-
mance is clearly of primary concern, and most on-line
collision avoidance approaches therefore revise mo-
tions according to some heuristics that are computed
locally, in the neighborhood of impending collisions.
Fast though it is, re-planning motions according to lo-
cal constraints only is indeed short-sighted, and on-
line collision avoidance systems therefore make rela-
tively poor path planners.
We propose that an embodied, intelligent agent,
capable of adapting to a changing real world envi-
ronment, requires both the ability to plan with re-
spect to global task constraints and the ability to re-
act to changes in its environment. Furthermore, it is
our intuition that the planner should learn from the
reactions to its plans, which requires a tightly inte-
grated approach to planning and control. In this work
we consider the theoretical implications of coupling
a roadmap planner to a controller that provides re-
flexive reaction to collisions. Furthermore, we intro-
duce Virtual Skin, our open-source framework, which
monitors the state of a physical robot in real-time,
facilitating applied research on tightly coupled plan-
ner/controler systems.
The remainder of the paper proceeds as follows:
In section 2, the motion planning problem is defined.
Prevalent approaches to motion planning and reactive
collision avoidance are discussed in sections 3 and 4,
respectively. In section 5 we describe our assump-
tions concerning the motion planning problem for
non-static environments, and we propose the integra-
tion of reactive collision response into the roadmap
planning approach. The tight coupling of planning
and control offers the considerable benefits that:
1. Roadmap planning is extended to non-static envi-
ronments by transforming the roadmap graph into
a Markov Decision Process (MDP).
2. Adaptation of the map to changes in the environ-
ment is phrased as a reinforcement learning (RL)
problem.
3. Topological changes to the roadmap can be han-
dled within the MDP framework.
In section 6, we introduce our open source soft-
ware framework, which implements the tight cou-
pling of planning and reactive control modules. In
section 7, we conduct a brief feasibility study on the
implemented software, which was developed in col-
laboration with the EU project IM-CLeVeR. Finally,
in section 8 we discuss outstanding issues and future
work .
2 THE MOTION PLANNING
PROBLEM
For an arm (or a humanoid upper body) working in
3D space, the motion planning problem is formalized
as follows: The workspace,
W = R
3
(1)
contains a robot composed of n links:
A(q) =
n
[
i=1
A
i
(q) ⊂ W (2)
Each link, A
i
, is represented by a semi-algebraic
model. The vector of joint positions
q ∈ C = R
n
(3)
denotes the configuration of the robot A, and kine-
matic constraints yield a proper functional mapping
q → A(q). Furthermore, there exists an obstacle re-
gion composed of m obstacles:
O =
m
[
i=1
O
i
⊂ W (4)
Each obstacle, O
i
, is also expressed as a semi-
algebraic model.
To find feasible motions, we must disambiguate
the feasible region of the configuration space, C
f ree
⊂
C, from the infeasible region:
C
in f easible
= C
O
∪C
sel f
⊂ C (5)
C
O
denotes the set of configurations q for which A(q)
intersects O:
C
O
= {q ∈ C | A(q) ∩O 6= ∅} ⊂ C (6)
In equation 5 C
sel f
denotes the set of configurations q
for which A(q) is self-intersecting. To handle this, let
P denote a set of pairs of indices ( j, k) ∈ P such that
REFLEXIVE COLLISION RESPONSE WITH VIRTUAL SKIN - Roadmap Planning Meets Reinforcement Learning
643

j 6= k and j, k ∈ {1, 2, ...n}, which correspond to the
poses of two links A
j
and A
k
that are not allowed to
collide. As a matter of convenience, indices of links
that share a common joint are typically excluded from
P. The set of self colliding poses can then be ex-
pressed:
C
sel f
=
[
[ j,k]∈P
{q ∈ C | A
j
(q) ∩ A
k
(q) 6= ∅} ⊂ C (7)
The motion planning problem is essentially to find
a trajectory T (q
initial
, q
goal
) ⊂ C
f ree
that interpolates
initial and goal configurations while not intersecting
C
in f easible
.
3 PLANNING ALGORITHMS
One approach to solving the above problem is to plan
ahead of time. Algorithms that take this approach
are generally called “Path Planning” or “Motion Plan-
ning” algorithms, as they plan and validate feasible
motions, which can later be passed to the robot as ref-
erence trajectories. There exists a vast literature on
this topic, and we refer the interested reader to the ex-
cellent, recent text book by Stephen LaValle (LaValle,
2006). Here we focus on the only class of motion
planning algorithms that scale to the high dimensional
configuration spaces of humanoid robots.
Sampling based motion planning algorithms
probe the configuration space with some sampling
scheme. The samples q are mapped to poses A(q),
which are in turn used to do collision detection
computations, revealing whether q ∈ C
f ree
or q ∈
C
in f easible
. In this way, feasible motions are con-
structed piece-by-piece. This can either be done on
an as-needed basis (single query planning) (LaValle,
1998; Perez et al., 2011), or the results of queries can
be aggregated and stored such that future queries can
be fulfilled faster (multiple query planning) (Latombe
et al., 1996; Li and Shie, 2007). Following, we con-
sider in broad terms the benefits and drawbacks of
these two approaches.
The strength of single query planning algorithms
is that they directly and effectively implement explo-
ration by searching for feasible motions through trial
and error. Some algorithms, such as RRT (LaValle,
1998), and its many descendants, even offer proba-
bilistic completeness, guaranteeing a solution in the
limit of a dense sampling sequence, if one exists.
Moreover, since these algorithms answer each query
by starting a search from scratch, they can readily
adapt to different C
f ree
and C
in f easible
from one call
to the next. It is however noteworthy that C
f ree
and
C
in f easible
must remain constant during the course of
planning. The primary drawback of single query al-
gorithms is their high complexity, which is O(m
n
),
where m is linear sampling density and n is the dimen-
sionality of the configuration space. A recent state-
of-the-art algorithm, BT-RRT (Perez et al., 2011), re-
quires 10 seconds to find a feasible solution to a rel-
atively easy planning problem, wherein two arms (12
DOF) must circumvent the edge of a table. Moreover,
the initial solution, the result of stochastic search, is
quite circuitous, and BT-RRT requires an additional
125 seconds to smooth the motion by minimizing a
cost function in the style of optimal control.
Practically speaking, a latency of tens to hun-
dreds of seconds with respect to a robot’s response
to commands is often unacceptable. This is the
primary motivation for multiple query planning al-
gorithms, which typically utilize a “roadmap” data
structure in the form of a graph G(V, E), where V =
{v
1
, v
2
, ...v
n
} ∈ C
f ree
and E is a set of pairs of indices
( j, k) ∈ V such that j 6= k and j, k ∈ {1, 2, ...n}. With
each member of E is associated a verified collision
free trajectory T (E
i
) ⊂ C
f ree
. The roadmap approach
reduces each query from a search in R
n
to graph
search, which can be carried out by Dijkstra’s shortest
path algorithm in O(|V | · log(|V |)) time. Importantly,
the roadmap graph represents a natural crossroads be-
tween motion planning as an engineering discipline
and the field of artificial intelligence, as it is a spe-
cial case of an MDP, where “states” are configurations
q ∈ C
f ree
, “actions” are trajectories q(t) ⊂ C
f ree
, and
all state transition probabilities are equal to one.
Early versions of the roadmap approach, such as
PRM (Latombe et al., 1996), first constructed the map
offline, then queried it to move the robot (Latombe
et al., 1996). Whereas more recent versions can
build the map incrementally on an as-needed basis by
extending the current map toward unreachable goal
configurations using single query algorithms (Li and
Shie, 2007). The ability of roadmap planners to
quickly satisfy queries, even for complex robots with
many DOFs, makes them an appealing choice for
practical application in experimental robotics. More-
over, when roadmaps are constructed incrementally
by single query algorithms, the resulting system is
one that builds knowledge from experience gained
through exploratory behavior. As the roadmap grows
over time, it becomes more competent, particularly
with respect to navigating the regions of the configu-
ration space in which the planner has operated in the
past.
Although the incrementally learned roadmap (Li
and Shie, 2007) makes significant steps toward the
autonomous development/acquisition of reusable be-
ICAART 2012 - International Conference on Agents and Artificial Intelligence
644

haviors, it is plagued by one very unrealistic assump-
tion, namely that T (E
i
) ⊂ C
f ree
for all time. In other
words, neither the obstacle region O nor the robot it-
self A can change in a way that might have unpre-
dictable consequences with respect to the roadmap
G(V, E). Therefore, the roadmap approach implic-
itly prohibits the robot from grasping objects, which
would change A, and even if objects could be moved
without grasping, that is anyway prohibited also, as it
would change O.
With respect to the goal of adaptively building
knowledge of feasible actions from exploratory be-
havior, we summarize the benefits and drawbacks of
single query vs. multiple query motion planning al-
gorithms as follows. Single query planning algo-
rithms such as RRT effectively implement exploration
and can readily adapt to changes in the environment
from one query to the next, however they produce cir-
cuitous motions that require smoothing, and they are
not fast enough to be applied online in practice. Mul-
tiple query roadmap based algorithms are quite fast,
as they reduce the planning query to graph search,
and when the map is constructed incrementally by
single query algorithms, the resulting system clearly
aggregates knowledge from experience through ex-
ploration. The drawback of the incrementally con-
structed roadmap is that it requires a static environ-
ment, which is not practical in the unstructured envi-
ronments of interest discussed in section 1.
4 REACTIVE COLLISION
AVOIDANCE
An alternative to planning feasible actions preemp-
tively is to react to impending collisions as they are
detected. This approach was pioneered by Oussama
Khatib (Khatib, 1986), under the moniker “real time
obstacle avoidance”. However, it has become widely
known as the “potential field” approach, and is for-
mulated as follows for non-redundant manipulators in
terms of the notation from section 2 above: Consider
a point x ∈ A
i
(q) ⊂ W , and let
U
O
(x) =
m
∑
i=1
U
Oi
(x) (8)
be a potential field function, which represents the in-
fluence of m obstacles in the workspace on x. Let
each U
i
be a continuous, differentiable function, de-
fined with respect to an obstacle region O
i
⊂ W , such
that U
i
is at a maximum in the neighborhood of the
boundary of O
i
and goes to zero far from O
i
. Khatib
suggests:
U
Oi
(x) =
1
2
η(
1
ρ(x)
−
1
ρ
0
)
2
: ρ(x) ≤ ρ
0
0 : ρ(x) > ρ
0
(9)
where ρ is the shortest distance from x to O
i
, and ρ
o
controls the range of the potential field’s influence.
The defining characteristic of the potential field ap-
proach is that the robot is controlled such that x de-
scends the gradient of the potential field, U
O
. The
control input is computed as follows: The influence
of the potential field U
O
on the robot is first computed
as a force f that acts on the robot at x:
f = −
∂U
O
∂x
= −
m
∑
i=1
∂U
Oi
∂x
(10)
The force f is then transformed via the Jacobian
matrix to yield joint torques τ.
τ(x) = J
T
(q)Λ(x) f (x) (11)
Here, Λ(x) is a quadratic form, a “kinetic energy ma-
trix” that captures the inertial properties of the end
effector.
In a similar fashion, another potential field U
G
can
be defined to attract the end effector to the goal posi-
tion, and a third can be defined directly in the config-
uration space to push q away from joint limits.
Khatib’s approach is very effective with respect to
quickly generating evasive motions to keep the ma-
nipulator away from obstacles, however it offers a
very brittle solution to the motion planning problem
presented in section 2. It is often the case that the su-
perposition of potential functions creates local min-
ima, attractors in which the controller gets stuck.
Subsequent work has reformulated the above to
improve the robustness of the implied global plan. For
example, (Kim and Khosla, 1992) uses harmonic po-
tential functions, which guarantee that no local mini-
mum exists other than the global minimum, or alter-
natively, that point x above, if treated as a point robot,
will always be pushed to the goal from any initial con-
dition. Still though there may exist structural local
minima, configurations where non-point robots will
not be able to proceed although they are being forced
by the potential gradient.
Another reformulation is known as “attractor dy-
namics” (Schoner and Dose, 1992), wherein the robot
does not descend the gradient of the potential func-
tion, but rather moves with constant velocity, adjust-
ing its heading according to a dynamical system that
steers toward the goal, but away from obstacles that
lie in the robot’s path. The method was developed
for mobile robotics, however it has also been ap-
plied to manipulators in a manner similar to the above
(Iossifidis and Schoner, 2004; Iossifidis and Schoner,
2006). And again, although “attractor dynamics” im-
proves robustness over the original “potential field”
REFLEXIVE COLLISION RESPONSE WITH VIRTUAL SKIN - Roadmap Planning Meets Reinforcement Learning
645

approach, this time by keeping the state of the robot
in the neighborhood of a stable attractor, it is still a
heuristic planner that bases decisions on local infor-
mation only, and it can therefore get stuck.
A third reformulation called “Elastic Strips”
(Brock and Khatib, 2000) combines the local reac-
tivity of the potential field approach with the more
global framework of a roadmap planner. The edges
of the roadmap graph are trajectories that are param-
eterized in such a way as to be deformable under the
influence of a potential field. Again, this approach
does improve robustness with respect to global plan-
ning, however it still suffers from structural local min-
ima, and the elastic graph edges may not be able to
circumvent certain obstacles. Failure to circumvent
an obstacle while traversing an elastic edge causes
the roadmap planner to fail exactly as its non-elastic
counterpart would. Since re-planning is limited to lo-
cal deformation of the current trajectory, the approach
cannot cope with topological changes in the roadmap.
Worse yet, after failure, the configuration of the robot
does not lie on any of the nodes of the roadmap graph,
nor on its undeformed edges. Therefore, a single
query planner must be invoked to find a feasible path
back to a node of the roadmap graph, and this could
be problematic in a dynamic environment.
All approaches based on the potential field idea
use local information from the workspace, and trans-
form it into motor commands according to some
heuristics. It is therefore not surprising that these
approaches excel at fast, reactive obstacle avoidance
while they have trouble with global planning tasks.
Accordingly, potential field approaches have become
popular in the context of safety and human-robot in-
teraction (De Santis et al., 2007; Dietrich et al., 2011;
Stasse et al., 2008; Sugiura et al., 2007). In these ap-
plications a potential filed U
G
, to attract the robot to
the goal, is not defined. Instead, in the absence of
influence from obstacles and joint limits, some other
planner/controller system is allowed to operate freely.
Once again, to relate this discussion back to the
topic of adaptively building knowledge of feasible ac-
tions from exploratory behavior, we make the follow-
ing observation: Reactive collision avoidance is by
definition quite contrary to exploration, however it is
nonetheless a highly desirable, even necessary com-
ponent of any learning system that hopes to differ-
entiate feasible sequences of actions from infeasible
ones in a changing environment.
5 APPROACH
The motion planning literature provides many algo-
rithms that perform well in static environments. On
the other hand, the control literature provides meth-
ods for quickly reacting to avoid collisions in dynamic
environments. However, surprisingly little attention
has been paid to environments that change sporadi-
cally, but drastically. We propose that a tightly cou-
pled system of planner and controller is in principal
well suited to this kind of environment. As plans are
executed optimistically, the intervention of the reac-
tive controller can be treated as feedback to improve
planner.
Consider for a moment a roadmap, G(V, E) that
covers the configuration space of a humanoid upper-
body reasonably well. Such a graph will undoubt-
edly allow us to move the robot around while avoid-
ing self-collision, and that will remain true regard-
less of how the environment changes. Therefore, if
we were to say, put a table in front of the robot,
it seems likely that we would prefer to adapt G to
the new constraints, rather than throw it away and
start from scratch. The addition of the table how-
ever, has certainly invalidated many edges in G, as
T (E
i
) 6⊂C
f ree
∀i ∈ {a, b, c, ...}, drastically changing its
topology.
Before the addition of the table, G had been a valid
MDP, with states V and actions E, and all state tran-
sition probabilities equal to one. After the addition of
the table, the MDP became invalid. The probability
of transitioning from V
a
to V
b
along T (E
i
) had been
equal to one, now it is equal to zero. Therefore, the
state transition probabilities no longer sum to one for
the actions E
i
in states V
a
. In order to repair the MDP,
we require an alternative state transition, in fact one
that can actually be implemented for a real physical
robot.
We propose the simplest possible solution, should
the transition from V
a
to V
b
along T(E
i
) fail, retreat to
V
a
. Now, every state/action combination in G has two
possible state transitions associated with it: V
a
→ V
b
and V
a
→ V
a
. And the state transition probabilities
can be maintained such that they always sum to one.
With the validity of the MDP restored, we can treat
discovery and avoidance of the table as a RL problem.
This simple behavior, which is inspired by the re-
flexive response to surprise that is easy to observe in
humans, when coupled to the roadmap planner, has
the following important consequences:
1. We are able to generalize roadmap planning to
non-static environments, which is accomplished
by adopting probabilistic state transitions and
casting the roadmap graph into an MDP.
2. Within the MDP, the discovery and avoidance of
novel objects/obstacles can be phrased as a rein-
forcement learning problem.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
646

3. In contrast (Brock and Khatib, 2000), which also
generalizes roadmap planning to non-static envi-
ronments, our method is able to cope with changes
to the topology of the roadmap. This is also a con-
sequence of adopting the probabilistic framework.
4. Provided that unexpected contact with obstacles
can be detected physically, the response behavior
need not be generated by a computational model
of the robot. This is to say that the only informa-
tion required to facilitate the collision response is
the history of the trajectory T (E
i
).
6 IMPLEMENTATION
We have implemented the reflexive collision response
behavior described in section 5 within a software
framework that we call Virtual Skin. The source code
is available through the software repository of the EU
project IM-CLeVeR. In this section we will describe
the software at a high level, then discuss design deci-
sions and implementation issues.
Virtual Skin is a module for YARP. A popular open
source “robotics platform”, YARP is essentially mid-
dleware that allows roboticists to create distributed
systems of loosely coupled modules, without having
to worry about the details of network protocols and
operating systems. As a YARP module, Virtual Skin
can easily be used with any robot for which YARP
drivers have been implemented. The software is pri-
marily intended to facilitate research on the RL prob-
lem formulated in section 5, in an applied setting. We
have tried in our implementation to maximize its gen-
erality by focusing on transparency and modularity.
The software consists of three primary components:
1. A kinematic model of the robot/workspace sys-
tem that is dynamically updated in real-time by
sensory/state information from the hardware.
2. A port filter that allows Virtual Skin to act as a
proxy between an arbitrary planning/control mod-
ule and the robot.
3. A collision response behavior.
The trio of components works as follows: The
planner/controller, which can be any program ca-
pable of controlling the robot, connects to Virtual
Skin’s proxy versions of the robot’s motor control
ports. The proxy is completely transparent, in fact
the planner/controller does not even know that it is
not connected to the real robot. The robot responds
to control commands passed through the proxy, and
asynchronous messages are streamed back across the
network, communicating the state of the hardware.
Stochastic
Controller
iCub Control Board Interface
(YARP Ports)
FILTERED
iCub Control Board Interface
(YARP Ports)
Collision Data
(YARP Ports)
Encoder
Positions
Motor
Control
Port Filter
Collision-Recovery
Controller
Skin
Signal
Robot Model
VirtualSkin
Figure 1: Simplified Architecture - Virtual Skin wraps the
iCub robot’s motor control interface (right). A stochastic,
exploratory control program is connected to a proxy mo-
tor control interface (left). A port filter connects the motor
control interface to its twin (middle). The kinematic robot
model (top), driven by streams of motor encoder positions
from the robot, does collision detection and regulates the
state of the port filter. When the model detects collision, the
port filter cuts off the stochastic controller and invokes an
alternative user-defined controller (bottom) to recover from
the dangerous configuration.
These messages are received by Virtual Skin, and they
are used to update the kinematic model. Collision de-
tection computations are done on the model in real-
time, and when an unwanted collision is detected,
the port filter cuts off the controlling program from
the robot. The robot is then stopped, and the colli-
sion response behavior is executed. When the behav-
ior finishes executing, control is restored to the plan-
ner/controller. The architecture of the implementation
is shown graphically in figure 1.
It is important to mention that Virtual Skin is not
intended to be used as a foolproof safety mechanism
in the sense that it does not provide guarantees that
collisions will be prevented regardless of the robot’s
inertial state. Instead it is intended to simulate full
body tactile feedback (hence the name Virtual Skin)
to facilitate research on embodied AI. We therefore
encourage careful exploratory behavior. That is to
say that obstacles should be modeled with generous
bounding volumes, and motor velocities should se-
lected in accordance with the safety margin afforded
by nearby bounding volumes.
6.1 Kinematic Model
Although the reflexive behavior discussed above,
which motivates the implementation of Virtual Skin,
does not require a model of the robot to compute the
REFLEXIVE COLLISION RESPONSE WITH VIRTUAL SKIN - Roadmap Planning Meets Reinforcement Learning
647

Figure 2: Virtual Skin detects impending collision between
the iCub humanoid robot and a table. Darkened (red) ge-
ometries in the model (left) are colliding.
collision response trajectory, we do need a way to de-
tect impending collisions. Since the iCub is not com-
pletely wrapped in skin-like tactile sensors (nor any
other available robot we know of), a computational
model is required to represent the robot/environment
system.
As Virtual Skin is to operate online in realtime,
we designed it around a kinematic robot model, the
configuration of which is supplied by streams of mo-
tor encoder positions from hardware. To minimize
the computational burden, we model geometries as
unions of geometric primitives, currently supported
are spheres, cylinders, and boxes. This has the added
benefit that we can easily model non-convex objects.
The model also records its history in a large circu-
lar buffer that can be annotated in realtime by send-
ing messages to a particular RPC port, and queried as
necessary.
The robot model is specified via an XML config-
uration file. The kinematic constraints are expressed
using “Zero Position Displacement Notation” (Gupta,
1986), which is significantly less complex and more
intuitive than the popular Denavit-Hartenburg con-
vention. And geometries can be attached to the model
by specifying them directly in the XML hierarchy.
The configuration of objects in the world can be
specified similarly by another XML configuration file.
This is the method used to specify the table in section
7.2. Alternatively, objects in the robot’s environment
can be added, transformed, and destroyed dynami-
cally at any time via a remote procedure call (RPC)
interface. This allows the model to be maintained in
real time by a computer vision or other sensory mod-
ule if one is available.
Collision detection in Virtual Skin is handled
by the Software Library for Interference Detection
(SOLID) (van den Bergen, 2004), which is highly
optimized and supports primitives, Minkowski sums,
and polyhedra. To keep the collision detection com-
putations as efficient as possible, we employ hierar-
chical pruning to reduce the number of pairs of ge-
ometries to be tested within the kinematic tree. More-
over, objects in the robot’s environment are not tested
against each other, so the approximate complexity of
collision detection computations is O(n
2
· m) where n
is the number of objects in the robot model and m is
the number of objects in the environment.
The model is implemented as a static library that
can be compiled separately, independent of YARP.
Thus in addition to being an integral part of Vir-
tual Skin, the kinematic model is a stand-alone plan-
ning environment that can be reused easily in other
projects/modules.
6.2 Port Filter
In order to enforce modularity and allow Virtual Skin
to function with the widest possible range of plan-
ners/controllers, we have embedded it in a port filter
that acts as a proxy. The port filter is written entirely
in the YARP API, and it filters a “ControlBoardInter-
face” object which consists of several YARP ports
(see YARP documentation). The most important con-
sequence of this design is that the workings of Virtual
Skin are completely transparent to the client program,
meaning that any program that can connect to a robot
and control it can also do so through Virtual Skin.
6.3 Reflex Behavior
When the reflex behavior is triggered, the configu-
ration history of the robot is first queried from the
robot model. Then, the poses from the history q
i
∈
{q
t
, q
t−1
, q
t−2
, ...q
t−n
} are sent to the robot as sequen-
tial position move commands, causing the robot to re-
trace its steps.
The model continues doing collision detection and
adding to the history. When the reflex behavior starts,
the poses being logged are colliding. In order to avoid
that colliding poses remain in the buffer, as soon as
the model is no longer colliding, the pose buffer is
reinitialized with the non-colliding pose.
Recall that the history can be annotated via an
RPC port. If we desire that the reflexive retreat
should stop at a particular configuration, as described
in section 5, then the planner/controller must annotate
“waypoints” in the history, which correspond, for ex-
ample, to vertices in a roadmap graph. The reflexive
behavior provided in the Virtual Skin distribution, re-
traces the history until either an annotated waypoint
or the end of the buffer is encountered.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
648
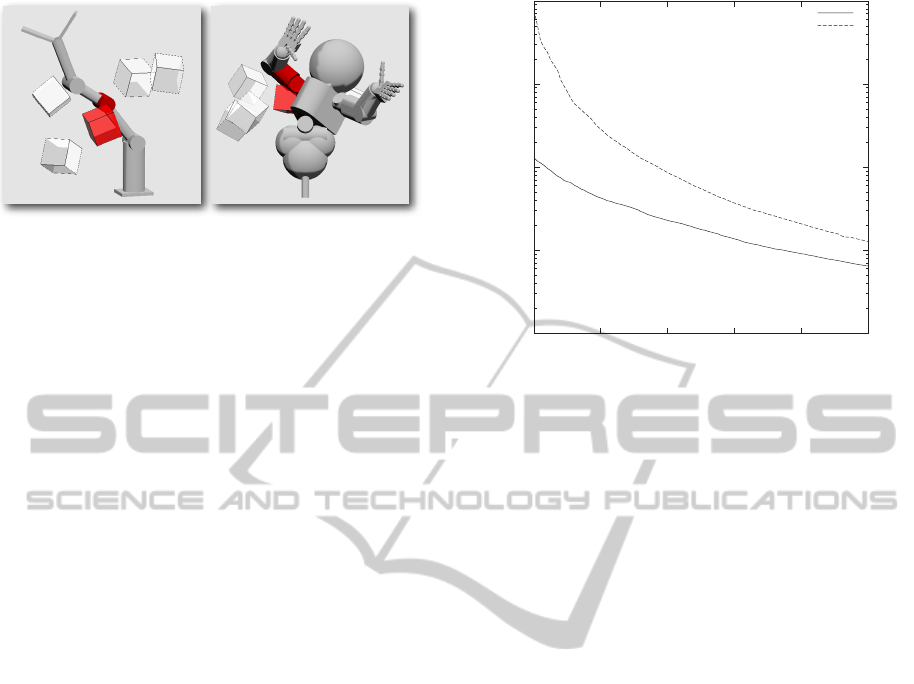
Figure 3: Kinematic Robot Models - The Katana arm
(left) and the iCub humanoid (right) collide with random
obstacles. Darkened (red) geometries are colliding.
Lastly, the reader should be aware that the mod-
ular nature of the Virtual Skin implementation makes
this collision response behavior easy to replace with
arbitrary code.
7 FEASIBILITY STUDY
In this section, we discuss the results of two experi-
ments running Virtual Skin. The first experiment ana-
lyzes the scalability of the software with respect to the
complexity of robot models and environments. The
second, verifies that Virtual Skin adequately protects
the iCub humanoid from harm while under the con-
trol of a purely random exploratory control policy,
which amounts to motor babbling using all DOFs of
the iCub’s upper-body.
7.1 Runtime Performance - Scalability
This experiment analyzes the performance of the
kinematic model within Virtual Skin, as the number
of modeled objects in the robot’s environment grows.
The chosen experimental setup is a path planning sce-
nario, wherein the kinematic/geometric model (figure
1 - top) is run offline without a port filter (figure 1
- middle) or a physical robot (or simulator) to sup-
ply streams of configurations. Instead, each joint is
driven through its entire range of motion in a series of
discrete steps by a simple oscillator. The motion con-
tinues uninterrupted (collision events to not stop the
model or alter the behavior of the oscillators) for sev-
eral minutes as obstacles are randomly added to the
robot’s workspace. The obstacles chosen for this ex-
periment are boxes, as they are the most computation-
ally expensive of the currently supported primitives.
The experiment was run on a dual-core 2.4GHz
laptop with 4GB of memory, and two different robot
models were used; a 6 DOF Katana arm (9 primi-
tives), and the 41 DOF upper-body of an iCub hu-
10
100
1000
10000
100000
0 200 400 600 800 1000
Hz
Number of Obstacles
iCub
Katana
Figure 4: Scalability of Virtual Skin - A simple robot
model (Katana - 9 primitives) is compared with a complex
one (iCub - 129 primitives). The curves show the number
of times collision detection can be computed per second (y-
axis) given a particular number of obstacles modeled in the
robot’s environment (x-axis).
manoid robot (129 primitives). Figure 3 shows snap-
shots from the early stages of the running experi-
ments, and the results are plotted in figure 4. Based on
this experiment, we make the following two claims:
1. For simple arms in simple environments, Virtual
Skin can keep pace with even the fastest control
frequencies encountered in industrial practice.
2. Virtual Skin can compute hundreds of poses per
second for a humanoid with hundreds of obstacles
in the environment, which is adequate for most
applications in developmental robotics.
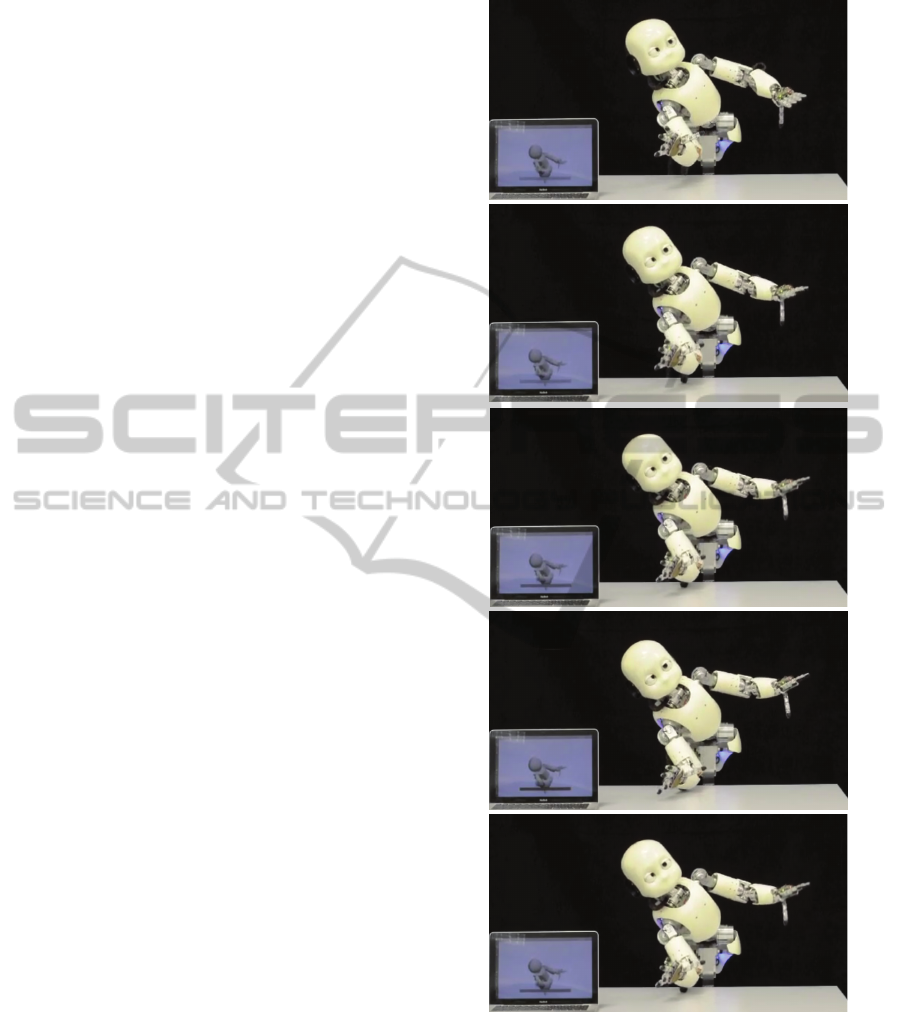
7.2 Motor Babbling on The iCub
Humanoid Robot
The software architecture employed in this experi-
ment is shown in figure 1. The stochastic control
policy is simply randomly generated configurations
sent to the robot through Virtual Skin as position move
commands. All joints on the iCub upper-body except
those in the hands are controlled. When invoked, the
collision recovery controller, tracks a trajectory com-
prised of the previous n states in the robot’s history,
returning control as soon as the robot model is in a
non-colliding configuration. The modeled environ-
ment consists of a table, as pictured in figures 2 and 5.
The experiment has been run for approximately two
hours over several trials of 5 to 20 minutes each with
joint velocity limited to a moderate 20% of maximum.
Video excerpts of some of these trials are available as
supplemental material on the authors’ web sites.
REFLEXIVE COLLISION RESPONSE WITH VIRTUAL SKIN - Roadmap Planning Meets Reinforcement Learning
649
As expected, the stochastic controller quickly pro-
duced many motions, which uninterrupted would
have resulted in destructive collisions. However Vir-
tual Skin effectively prevented all of them. Included
were several commonly occurring self collisions,
such as elbow vs. hip, and upper-arm vs. chest, as
well as many collisions between the hands/forearms
and the table.
The experiment demonstrates that the Virtual Skin
framework is a feasible tool to facilitate study of the
RL problem formulated in section 5 in an applied set-
ting on a real humanoid robot.
8 DISCUSSION
We motivated the work presented here around the
need for modern, advanced robots such as humanoids
to serve in challenging, unstructured environments
such as homes, schools, hospitals, and offices. Since
engineers and programmers are not likely to be able
to adequately describe the wide range of constraints
and operating conditions that will be encountered in
such surroundings, we argued in favor of systems that
adaptively and incrementally build a repertoire of ac-
tions and/or behaviors from experience.
Incrementally learned roadmap planners (Li and
Shie, 2007) are an appealing approach to the problem,
as they build up knowledge of feasible actions from
exploratory behavior, and they also scale to the large
configuration spaces of humanoid robots. However,
they require us to assume a static environment, which
is unrealistic.
We proposed a novel yet simple integration of
roadmap planning with reflexive collision response,
allowing the roadmap representation to be trans-
formed into a Markov Decision Process. Roadmap
planning is thereby extended to changing environ-
ments, and the adaptation of the map can be phrased
as a reinforcement learning problem.
We implemented the proposed reflexive collision
response, and discussed its design. The feasibility of
the software was also verified in experiments with the
Katana Manipulator and the iCub humanoid upper-
body.
Still to do is to analyze the robustness of our re-
flexive response behavior in dynamic environments,
and to study the proposed RL problem as it applies to
the iCub humanoid using the Virtual Skin framework.
ACKNOWLEDGEMENTS
This research was supported by the EU Project IM-
Figure 5: Time lapse images of Virtual Skin detecting im-
pending collision with the table and invoking reflexive re-
sponse. Collision is detected in frame 4, and response be-
gins in frame 5.
CLeVeR, contract no. FP7-IST-IP-231722. The au-
thors would also like to thank Gregor Kaufmann and
Tobias Glasmachers for their valuable contributions
to the code-base.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
650

REFERENCES
Brock, O. and Khatib, O. (2000). Real-time re-planning
in high-dimensional configuration spaces using sets of
homotopic paths. In Robotics and Automation, 2000.
Proceedings. ICRA’00. IEEE International Confer-
ence on, volume 1, pages 550–555. IEEE.
De Santis, A., Albu-Schaffer, A., Ott, C., Siciliano, B., and
Hirzinger, G. (2007). The skeleton algorithm for self-
collision avoidance of a humanoid manipulator. In
Advanced intelligent mechatronics, 2007 IEEE/ASME
international conference on, pages 1–6. IEEE.
Dietrich, A., Wimbock, T., Taubig, H., Albu-Schaffer, A.,
and Hirzinger, G. (2011). Extensions to reactive self-
collision avoidance for torque and position controlled
humanoids. In Robotics and Automation (ICRA), 2011
IEEE International Conference on, pages 3455–3462.
IEEE.
Diftler, M., Mehling, J., Abdallah, M., Radford, N.,
Bridgwater, L., Sanders, A., Askew, S., Linn, D.,
Yamokoski, J., Permenter, F., Hargrave, B., Platt, R.,
Savely, R., and Ambrose, R. (2011). Robonaut 2: The
first humanoid robot in space. In Proceedings of IEEE
International Conference on Robotics and Automation
(ICRA).
Gupta, K. (1986). Kinematic analysis of manipulators using
the zero reference position description. The Interna-
tional Journal of Robotics Research, 5(2):5.
Iossifidis, I. and Schoner, G. (2004). Autonomous reaching
and obstacle avoidance with the anthropomorphic arm
of a robotic assistant using the attractor dynamics ap-
proach. In Robotics and Automation, 2004. Proceed-
ings. ICRA’04. 2004 IEEE International Conference
on, volume 5, pages 4295–4300. IEEE.
Iossifidis, I. and Schoner, G. (2006). Reaching with a redun-
dant anthropomorphic robot arm using attractor dy-
namics. VDI BERICHTE, 1956:45.
Khatib, O. (1986). Real-time obstacle avoidance for manip-
ulators and mobile robots. The international journal
of robotics research, 5(1):90.
Kim, J. and Khosla, P. (1992). Real-time obstacle avoidance
using harmonic potential functions. Robotics and Au-
tomation, IEEE Transactions on, 8(3):338–349.
Kusuda, Y. (2008). Toyota’s violin-playing robot. Industrial
Robot: An International Journal, 35(6):504–506.
Latombe, J., Kavraki, L., Svestka, P., and Overmars, M.
(1996). Probabilistic roadmaps for path planning in
high-dimensional configuration spaces. IEEE Trans-
actions on Robotics and Automation, 12(4):566–580.
LaValle, S. (1998). Rapidly-exploring random trees: A new
tool for path planning. Technical report, Computer
Science Dept., Iowa State University.
LaValle, S. (2006). Planning algorithms. Cambridge Univ
Pr.
Li, T. and Shie, Y. (2007). An incremental learning ap-
proach to motion planning with roadmap manage-
ment. Journal of Information Science and Engineer-
ing, 23(2):525–538.
Metta, G., Sandini, G., Vernon, D., Natale, L., and Nori, F.
(2008). The icub humanoid robot: an open platform
for research in embodied cognition. In Proceedings of
the 8th Workshop on Performance Metrics for Intelli-
gent Systems, pages 50–56. ACM.
Perez, A., Karaman, S., Shkolnik, A., Frazzoli, E., Teller,
S., and Walter, M. (2011). Asymptotically-optimal
path planning for manipulation using incremental
sampling-based algorithms. In Intelligent Robots and
Systems (IROS), 2011 IEEE/RSJ International Con-
ference on, pages 4307–4313. IEEE.
Schoner, G. and Dose, M. (1992). A dynamical systems
approach to task-level system integration used to plan
and control autonomous vehicle motion. Robotics and
Autonomous Systems, 10(4):253–267.
Stasse, O., Escande, A., Mansard, N., Miossec, S., Evrard,
P., and Kheddar, A. (2008). Real-time (self)-collision
avoidance task on a hrp-2 humanoid robot. In Robotics
and Automation, 2008. ICRA 2008. IEEE Interna-
tional Conference on, pages 3200–3205. IEEE.
Sugiura, H., Gienger, M., Janssen, H., and Goerick, C.
(2007). Real-time collision avoidance with whole
body motion control for humanoid robots. In In-
telligent Robots and Systems, 2007. IROS 2007.
IEEE/RSJ International Conference on, pages 2053–
2058. IEEE.
Takagi, S. (2006). Toyota partner robots. Journal of the
Robotics Society of Japan, 24(2):62.
van den Bergen, G. (2004). Collision detection in interac-
tive 3D environments. Morgan Kaufmann.
REFLEXIVE COLLISION RESPONSE WITH VIRTUAL SKIN - Roadmap Planning Meets Reinforcement Learning
651
