
REAL-TIME MULTICAST ROUTING IN WIRELESS
SENSOR NETWORKS
Hosung Park, Jeongcheol Lee, Seungmin Oh, Yongbin Yim, and Sang-Ha Kim
Department of Computer Engineering, Chungnam National University, Daejeon, Republic of Korea
Keywords: Wireless Sensor Networks, Multicasting, Real-time Communication.
Abstract: Real-time data dissemination to a multicast group is data delivery to each member in the multicast group
within the desired time deadline. The hardest aspect of this mission is to enforce the real-time constraint in
the communication between a source and the furthest member since an end-to-end delay is proportional to a
physical distance in wireless sensor networks. We call it the critical distance. The critical distance should be
most important constraint for real-time multicasting. That is, the delivery distance from a source to each
member should not be longer than the critical distance even by any reason. However, since the traditional
multicast protocols lay the strong emphasis only on the overall communication cost rather than delivery
distance to each member, they may violate the real-time constraint related to the critical distance. In this
letter, we propose a novel multicast protocol for real-time data dissemination.
1 INTRODUCTION
Many sensor network applications, such as
battlefield surveillance and fire alert, are designed to
interact between a fast changing event (He, 2005)
and multiple destinations (Akyildiz, 2010) in the real
world. In these applications, it is often necessary for
multicast protocol to meet real-time constraint. Real-
time data delivery to a multicast group, i.e. real-time
multicasting, may be defined as data dissemination
to each member in the multicast group within the
desired time deadline.
In wireless sensor networks, unlike legacy
networks, the hop count increases as the physical
distance packet travels increases since the radio
range of each node is bounded. The end-to-end delay
is also increases due to the increase of hop count. In
other words, the end-to-end delay is proportional to
the physical distance packet travels (He, 2005).
Therefore, the hardest part of real-time multicasting
is to enforce the real-time constraint from a source
node to the furthest destination in the multicast
group. In view of this, we refer to linear distance
between the source node and the furthest destination
as a critical distance. The critical distance must be
most important constraint for real-time multicasting.
In other words, the delivery distance from the source
node to each destination on the multicast tree must
not be longer than the critical distance even by any
reason.
In wireless sensor networks, multicast protocols
(Wu, 2007), (Sanchez, 2007) are proposed to deliver
data to multiple destinations. They try to achieve a
single goal, constructing cost-efficient multicast tree
that minimizes the total delivery path from the
source node to all destinations. Since the traditional
multicast protocols lay the strong emphasis only on
communication cost rather than each delivery
distance, they may violate the real-time constraint
related to the critical distance.
In this letter, we propose a novel Multicast
Protocol for Real-time Data dissemination (MPRD).
MPRD constructs multicast tree considering the
critical distance and disseminates data by
spatiotemporal approach (He, 2005) via the
multicast tree to satisfy the real-time constraint.
2 REAL-TIME MULTICASTING
The problem we are facing can be described as
follows: a data generated by a source node is
delivered to multiple destinations with real-time
constraint. In other words, each of the destinations
wants to receive the data within the desired time
deadline. In this section, we present MPRD for
achieving this goal in detail.
407
Park H., Lee J., Oh S., Yim Y. and Kim S..
REAL-TIME MULTICAST ROUTING IN WIRELESS SENSOR NETWORKS.
DOI: 10.5220/0003905604070410
In Proceedings of the 2nd International Conference on Pervasive Embedded Computing and Communication Systems (PECCS-2012), pages 407-410
ISBN: 978-989-8565-00-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
Source
D5
D1
D2
D3
D4
B4
B3
B2
B1
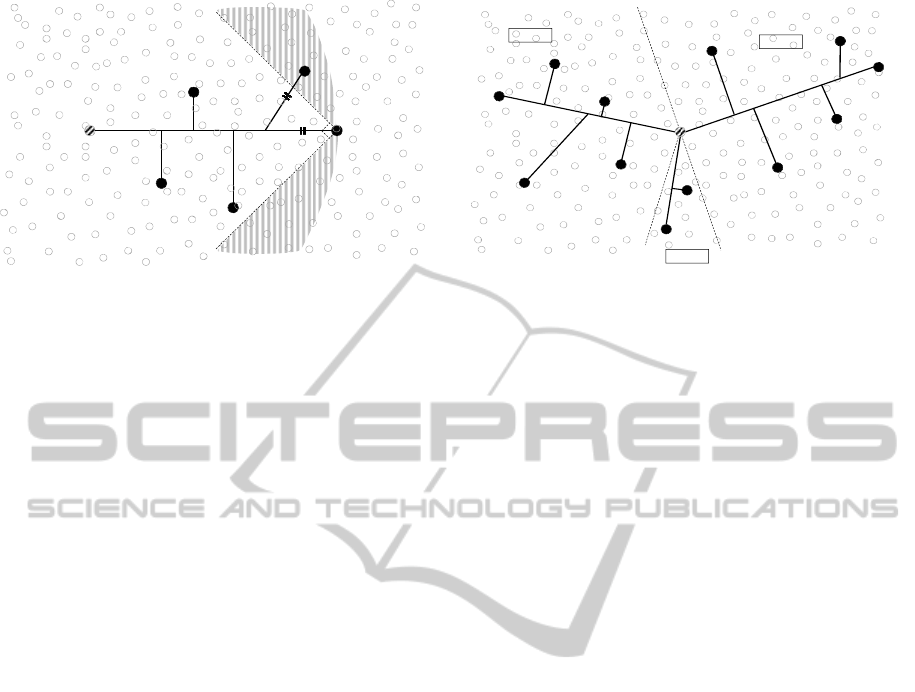
Figure 1: Real-time multicast tree construction.
2.1 System Model
MPRD, like other geographic multicast protocols
(Wu, 2007), (Sanchez, 2007), employs geographic
greedy forwarding as the underlying routing
protocol. In wireless sensor networks, geographic
multicast protocols are considered efficient, because
they use only location information without the
topology information of a whole sensor field. This
paper is focused on multicast tree construction and
data dissemination. We therefore assume throughout
this paper that the source node is aware of locations
of destinations. To know that information, the source
node can employ destination location service
schemes such as (Liu, 2006).
2.2 Real-time Multicast Tree
Construction
When the source node generates real-time data, the
source node constructs virtual multicast tree rooted
at itself for real-time data dissemination to multiple
destinations. On the multicast tree, each distance of
path from the source node to all destinations has to
be shorter than the critical distance. Note that the
multicast tree is the virtual structure calculated by
the source node instead of real structure constructed
in practice.
Given a set of the destinations, MPRD connects
the source node with the furthest destination in the
linear path as the base line; then the path splits into
branches toward other destinations. Figure 1 shows
the process. MPRD draws a straight line from the
source node to the D5, the furthest destination, as a
base line. Other destinations, D1-D3 are connected
with the base line perpendicularly since each line is
shortest path to the base line.
However, some destinations may have longer
path from the source node than the critical distance.
Destinations located in the shaded area in figure 1
D2
D1
D3
Source
Sector 1
Sector 2
Sector 3
L1
L2
Figure 2: Dividing sectors.
belong to this group. The D4 therefore needs to be
connected with the base line in other way. When
each destination is connected with the base line,
MPRD checks a condition regarding the critical
distance. If the path from the source is longer than
the critical distance (if the destination is located in
the shaded area), MPRD select a branch point on the
base line closer to the source node in order to make
the path from the source node to the D5 to be shorter
than or equal to the critical distance. In figure 1,
MPRD determines the branch point B4 which makes
the distance from the B4 to the D4 and the distance
from the B4 to the D5 to be equal; accordingly, the
distance of the path between the source node and the
D4 is equal to the critical distance.
Destinations in the opposite area of the first base
line cannot be perpendicularly connected with the
first base line. MPRD therefore divides the network
into two or three sectors based on locations of the
source node and the furthest destinations in each
sectors and constructs paths separately. In figure 2,
sector 1 is divided by the L1, orthogonal dotted line
of the base line from the source node to the D1. A
sub-tree rooted at the source node is constructed by
connecting destinations in sector 1 with the base
line. Sector 2 is divided by the L2, orthogonal dotted
line of another base line from the source node to the
D2 in residual area. The D2 is the furthest
destination among all destinations but destinations in
sector 1. Another sub-tree rooted at the source node
is constructed by connecting destinations in sector 2
with the base line the source node to the D2. The
third sub-tree is constructed by the same way in
sector 3, residual area except sector 1 and sector 2.
MPRD has low computation complexity due to
the simple method that each destination is
perpendicularly connected with the base line after
checking just one condition for the critical distance.
Dividing network is also useful since it make MPRD
be able to apply the simple method to each sector.
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
408

2.3 Data Dissemination
After the source node calculates the virtual real-time
multicast tree, the source node sends real-time data
to all destinations via the multicast tree.
In wireless sensor networks, to satisfy the desired
time deadline, real-time routing scheme proposed in
(He, 2005) utilize a spatiotemporal approach by
which data are delivered with a delivery speed
obtained from both the desired time deadline and the
distance from a source to a destination. Every
immediate node elects the next-hop node that is one
of one-hop neighbor nodes closer to the destination
than itself and has a relay speed larger than the
delivery speed. Hence, by relaying data with a faster
speed than the delivery speed per every hop, data
can be delivered on the desired time deadline. The
spatiotemporal approach can be applied due to the
property that data delivery delay is dependent on the
distance a packet travels in wireless sensor networks.
We apply the spatiotemporal approach in order to
disseminate real-time data.
After the source node calculates the virtual real-
time multicast tree, the source node encapsulates
calculated tree information and delivery speed in the
data packet and disseminates it along the calculated
multicast tree. The tree information is the locations
of destinations and branch points, and the delivery
speed is calculated with the desired time deadline
and the distance of the base line. Note that the tree
information and the delivery speeds are different at
each sector.
In the data dissemination process, each node
forwarding the packet selects a next-hop node
among one-hop neighbors that satisfy the condition
of the spatiotemporal approach. In figure 1, the data
packet is delivered toward the branch point B1 via
the spatiotemporal approach. When a sensor node
1 4 7 10131619222528
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Deadline Success Ratio
Simulation Round
GMP
GMR
MPRD
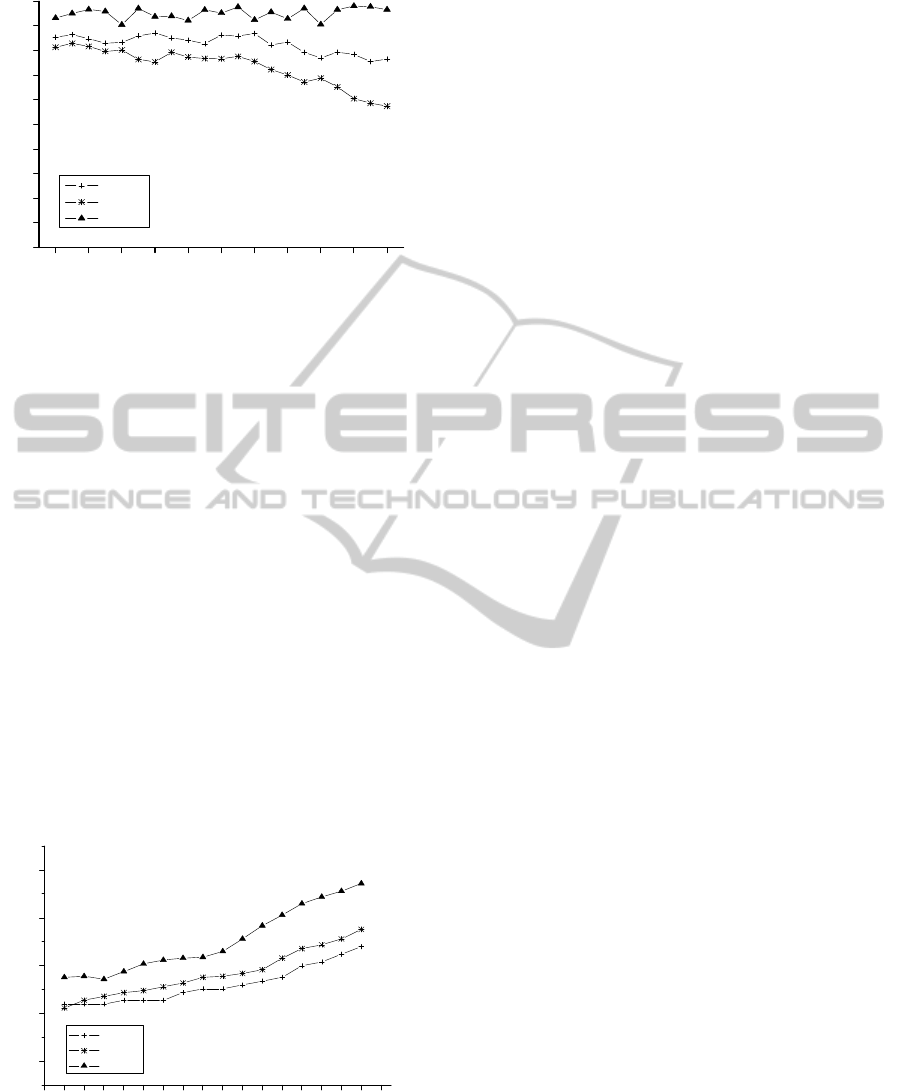
Figure 3: Deadline success ratio at each simulation round.
receives the data, if the B1 is located in radio range
of the node and the node has no neighbor which is
more closely located to the B1, the node elects itself
as a branch node for the branch point B1. The
branch node selects two next-hop nodes toward the
D1 and the B2. The location of the D1 is
encapsulated in packet toward the D1 and tree
information except the locations of the B1 and the
D1 is encapsulated in packet toward the B2. The
delivery speed of the packet toward the D1, of
course, could be recalculated by the distance on the
path from the source node and the D1. This process
is repeated until all destinations receive the data
packet.
3 PERFORMANCE EVALUATION
In this section, we present simulation results to
evaluate performance of MPRD. The purpose of
simulations is verification that MPRD has higher
success ratio of real-time data dissemination than
GMP (Wu, 2007) and GMR (Sanchez, 2007)
applying the spatiotemporal approach. We also
evaluate energy efficiency: one of the most
important issues in wireless sensor networks.
3.1 Simulation Environments
and Metric
We simulate MPRD on QualNet simulator. The
simulation network space is 1000 X 1000 m2. The
number of nodes is 5000 and the number of
destinations is 20. Transmission range of each node
is 30 m. Node and destination placement follows
random deployment. The source node is located at
the center of network and sends 20 data packets at
each round. The desired time deadline for real-time
constraint is 1 second and delay of each node is
randomly set between 0.03-0.1 seconds.
Deadline success ratio is average ratio of the
number of destinations that receive data packets
within the time deadline to the number of
destinations.
3.2 Simulation Results
Figure 3 shows the deadline success ratio at each
simulation round. We randomly deploy sensor nodes
and destinations at each simulation round. The
deadline success ratio of MPRD is distributed in
closer to 1 than other protocols. In other words,
MPRD has higher probability of satisfying the real-
time constraint. In GMP and GMR, the data is
delivered to some destinations by longer path than
the critical distance. MPRD however delivers data to
REAL-TIME MULTICAST ROUTING IN WIRELESS SENSOR NETWORKS
409
10 12 14 16 18 20 22 24 26 28 30
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Deadline Succes Ratio
The Number of Destinations
GMP
GMR
MPRD
Figure 4: Deadline success ratio in respect of the number
of destinations.
all destinations along paths shorter than or equal to
the critical distance. Since end-to-end delay is
dependent on the physical distance a packet travels
in wireless sensor networks, MPRD has higher
chance of satisfying the real-time constraint.
Figure 4 shows the deadline success ratio in
respect of the number of destinations. As the number
of destinations increases, the deadline success ratio
of GMP decreases. In GMP, more paths from the
source node to destinations are longer than the
critical distance as the number of destinations
increase, since the multicast tree becomes more
complicated. In addition to the reason, GMR spends
more time in order to forward data as the number of
destinations increases, since computation complexity
of every forwarding node increases exponentially.
MPRD however is unaffected by the number of
destinations, since MPRD delivers data to all
destinations along paths shorter than or equal to the
critical distance.
0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200 2400 2600 2800 3000 3200 3400
0.0
0.5
1.0
1.5
2.0
Average Energy Consumption (J/node)
Simulation time (sec)
GMP
GMR
MPRD
Figure 5: Energy consumption on the simulation time.
Figure 5 shows total energy consumption on the
simulation time. Since three multicast protocols has
no signaling overhead, energy consumption is
dependent on total hop counts for data
dissemination. Total tree length of MPRD is little
longer than that of GMP and GMR in order to make
each path shorter than the critical distance. Since the
distance packet travels is proportional to the hop
count as mentioned above, the total number of
packet transmission in MPRD is more than that in
GMP and GMR. Therefore total energy consumption
of MPRD is little higher than GMP and GMR.
4 CONCLUSIONS
We propose a new multicast protocol for real-time
data dissemination in wireless sensor networks. To
deliver data to multiple destinations with real-time
constraint, MPRD utilizes the property that data
delivery delay is dependent on the distance a packet
travels in wireless sensor networks. We refer to
linear distance between the source node and the
furthest destination as a critical distance. MPRD
constructs multicast tree that every delivery distance
from the source to each destination on the multicast
tree is shorter than the critical distance and apply the
spatiotemporal approach. Simulation results show
that MPRD has better performance than traditional
multicast protocols in terms of real-time data
dissemination.
REFERENCES
He, T., Stankovic, J. A., Abdelzaher, T. F., and Lu, C.,
2005, A spatiotemporal communication protocol for
wireless sensor networks. IEEE Transaction on
Parallel and Distributed Systems, vol. 16, no. 10, pp.
995-1006.
Akyildiz, I. F. and Vuran, M. C., 2010. Wireless Sensor
Networks. John Wiley and Sons, Ltd.
Wu, S. and Candan, K. S., 2007. Demand-scalable
geographic multicasting in wireless sensor networks.
Computer Communications, vol. 30, pp. 2931-2953.
Sanchez, J., Ruiz, P., Liu, J., and Stojmenovic, I., 2007.
Bandwidth-Efficient Geographic Multicast Routing
for Wireless Sensor Networks. IEEE Sensors Journal,
vol.7, no. 5, pp. 627-636.
Liu, D., Stojmenovic, I., and Jia, X., 2006. A scalable
quorum based location service in ad hoc and sensor
networks. In MASS’06, IEEE International
Conference on Mobile Ad-Hoc and Sensor System.
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
410
