
Modeling and Simulation of a Temperature Robust Control in Grain
Drying Systems for Thermal Damage Reduction
Josenalde B. de Oliveira
1
, Marcus V. A. Fernandes
2
and Leonardo R. L. Teixeira
3
1
Agricultural School of Jundiai, Federal University of Rio Grande do Norte, Macaiba, RN, Brazil
2
Federal Institute of Rio Grande do Norte, Zona Norte, Natal, RN, Brazil
3
Federal Institute of Rio Grande do Norte, Currais Novos, RN, Brazil
Keywords: Grains Drying, Temperature Control, Industrial Controller, PID, Variable Structure Control, Adaptive
Control.
Abstract: Informatics plays an imperative role in the designing and tuning of new control systems strategies, since the
computational simulation of such systems is part of the entire process of applying an algorithm on a real
environment. This paper presents an alternative to the Proportional-Integrative-Derivative (PID) controller
for temperature control in grain drying systems. The PID controller may present undesirable oscillations in
the presence of external disturbances associated with agroindustrial facilities, thus demanding a precise and
automatic tuning during the entire process. Robust controllers are suitable and recommended for the drying
final quality, since the grains are offered a thermal damage reduction when submitted to abrupt temperature
variations, as fragility and even crack during processing. Simulation results on an experimental model of a
nonlinear robust controller, named Shunt Indirect Variable Structure Model Reference Adaptive Controller
(SIVS-MRAC) are shown. Performance results before disturbances and parametric variations are compared
with the PID behaviour.
1 INTRODUCTION
Drying is an important unit operation applied in a
wide variety of processes such as in food,
pharmaceuticals and chemicals. This importance,
given specifically to the drying of grains, is a well
known phenomenon, since they represent a
worldwide source of food. Harvest, handling,
storage and appropriate drying must be carried out
properly in order to guarantee the quality and the use
of the grains production. To achieve this purpose,
many researches on applied software and hardware
have been carried out (Kemp, 2007). Grains are
biological entities extremely sensible to heat and
temperature effects, which may cause severe damage
to the expected final characteristics. Some quality
attributes may be seriously affected, such as the
amount and level of cracks, tissues integrity, acidity,
protein levels, germination and appearance. Rice, for
instance, is a grain susceptible to thermal damages
and, therefore, it needs special attention regarding
the temperature of the drying air, so that no
problems might arise during the processing.
Additionally, the percentage of entire perfect grains
is related to the drying method. Therefore, it is
recommended the choice of control techniques that
offer the guarantee of insensibility to possible abrupt
temperature variations generated from external
disturbances and/or physical parameters variations
as well, reflected on the mathematical model of the
system. These variations may arise from worn
components (resistances, capacitances, inductors and
so on) and their range of tolerance. The most
common agroindustrial control systems are based on
the Proportional-Integrative-Derivative (PID)
controller. However, fixed parameters controllers –
which do not take into account the uncertainties in
the physical parameters – as PID, tend to behave
slower and in an oscillatory way when submitted to
eventual disturbances which may occur. Works
which compare PID to other model based control
strategies, when applied to grain drying systems,
were always of interest (Forbes et al., 1984) and still
are (Agnew, 2012). A possible solution is the
aggregation of online parametric adaptation based
on estimators such as gradient or least squares,
however instability and lack of robustness in the
original algorithms were detected in Rohrs et al.
561
B. de Oliveira J., V. A. Fernandes M. and R. L. Teixeira L..
Modeling and Simulation of a Temperature Robust Control in Grain Drying Systems for Thermal Damage Reduction.
DOI: 10.5220/0003980705610565
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 561-565
ISBN: 978-989-8565-21-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
(1985). A possibility is the union of an adaptive
scheme, as the Model Reference Adaptive Control
(MRAC), which determines the desired closed loop
performance, with the nonlinear control technique,
called Variable Structure Systems (VSS), based on
the relay theory (Utkin, 1978). This technique was
named Variable Structure Model Reference
Adaptive Control (VS-MRAC) (Hsu and Costa,
1989) and it guarantees a fast and non oscillatory
transient. Robustness to external disturbances and
unmodeled dynamics was also achieved. Although,
originally, its control signal was switched and with
high frequency, further works were concerned about
its smoothness (Hsu, 1997). Oliveira and Araujo
(2008) developed a VS-MRAC version for the
unitary relative degree based on the indirect
approach of the adaptive control, named IVS-
MRAC, without performance losses and that turns
the controller project itself more intuitive, since the
controller parameters are directly related to the plant
model parameters. Its application on an industrial
environment can be seen in Oliveira et al. (2010).
The general case for the IVS-MRAC was presented
in Fernandes et al. (2010) and it was named Shunt
IVS-MRAC (SIVS-MRAC). It introduces a parallel
compensator to the original plant, and, by this
strategy, the entire system (plant + shunt
compensator) becomes of unitary relative degree,
thus allowing the use of the original IVS-MRAC in
series with a PI controller. In this work, the SIVS-
MRAC is applied (through simulations) on the
temperature control of a mathematical model
obtained from an educational drying grains
prototype. Simulation results in adverse conditions
of external disturbances and parameter variation are
presented and compared to the results of a PID,
tuned to behave as good as possible.
2 PID AND IVS-MRAC
CONTROLLERS
The PID controller provides a control signal to be
applied on the plant from the combination of three
actions, namely, the proportional, integrative and
derivative. Therefore, the project consists in
choosing three tuning parameters: the proportional
gain
p
k
, the integral time
i
T
and the derivative time
d
T
. To adjust these parameters, many methods may
be used, all based on an available model for the plant
and performance requirements, such as settle time or
overshoot. The SIVS-MRAC project makes the
assumption that the plant model has known and
limited uncertainties and it uses switched adaptive
laws which act on these same uncertainties
(Fernandes et al., 2010). A complete theoretical
description and the stability analysis may be found
in Oliveira and Araujo (2008), being the main
objective of this work the computer simulation of
the SIVS-MRAC, when applied to the temperature
control of a drying system.
3 MATERIALS AND METHODS
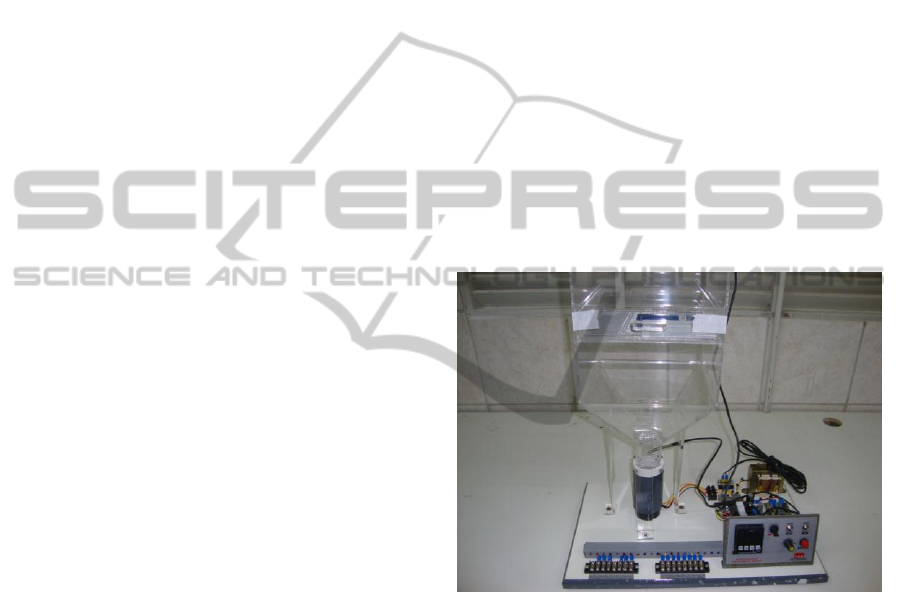
The drying grains system used in this work (Figure
1) is compound by a garner, a heater and a fan which
blows the air through the garner, where exists a
screened drawer, like a strainer, in which the grains
are deposited, characterizing a fixed-bed drying. The
temperature adjustment is made by an industrial PID
controller, being the temperature on the input and on
the top of the garner obtained from two Pt100
sensors.
Figure 1: Educational kit for drying grains control.
The air flow control is made by a potentiometer, that
acts on the PWM signal generator. The PID output
signal is applied on a Solid State Relay (SSR),
which, by its turn, acts on the electrical resistance of
the heater. Using the graphical method of step
response to get the mathematical model that better
describes the practical system, the air flow was fixed
in 10% and the system was modelled by a first order
transfer function with delay (1), with K=55, T=27
and L=6. For simulation purposes, the delay was
added to (1) and the Pade’s approximation for
exponentials was used in (1), generating
)(
1
sG
(2).
ICINCO 2012 - 9th International Conference on Informatics in Control, Automation and Robotics
562

s
e
s
s
e
s
sG
s
e
s
Ls
e
Ts
K
sG
6
037.0
03.2
6
27/127/27
27/55
)(
6
127
55
1
)(
.
Equation (1) may be written in the
parameterized form (Oliveira and Araujo,
2008):
Ls
p
e
s
k
sG
1
)(
,
where
03.2
p
k
is the high frequency gain
and
037.0
1
is the pole. For (1), the
original IVS-MRAC may be applied. After
the algebraic manipulations involved in using
Pade’s approximation, the new transfer
function is of relative degree three (2) and,
therefore, the generalized IVS-MRAC, the
SIVS-MRAC must be chosen.
(1)
055,0815,1
2
91,9
3
27
025,3
)(
1
sss
sG
(2)
To get (2) it was used the second order Pade’s
approximation, according to:
2
)(
!2
1
1
1
sTsT
e
sT
where T is the delay. Table 1 shows all used
parameters and auxiliary polynomials.
Table 1: PID and SIVS-MRAC parameters used in the
computational simulation.
PID
10;10;1.0
d
T
i
T
p
k
SIVS-MRAC
10;5.0:
)2.0(
1
2.0)(
25.005.0)(
6.012.0008.0)(
01.0;05.0
005.0;05.1
2
234
23
54321
4321
ip
c
m
TkPI
s
s
sW
sssss
ssssA
where
)(sA
m
is the characteristic polynomial,
)(s
is the filter,
)(sW
c
is the proposed shunt
compensator. The detailed description of the
parameters of the SIVS-MRAC may be found in
Fernandes et al. (2010). The method used to tune the
PID was the first method of Ziegler-Nichols.
4 SIMULATION RESULTS
The graphics present ideal situations (without
disturbances) and with the presence of common ones
in the industrial facilities, such as air humidity,
environmental temperature, air flow variations etc.,
that may affect the drying process and the product
final quality. These disturbances are modelled
through the addition of signals in the plant input and
by parameter variations in (1) and, consequently, in
(2). According to (1) and Oliveira and Araujo
(2008), the IVS-MRAC has three parameters to be
adjusted, related to the plant parameters:
.1;5.0;2
1
ppNOM
kk
The reference model
(desired dynamics) is:
1.0
1.0
)(
1
ss
k
r
y
sM
m
mm
(3)
The simulation step is h=10
-2
and the initial
reference is 45ºC. All simulations run during 400
seconds, except the step response (Figure 2).
Between t=50s (dON) and t=200s (dOFF) a step
disturbance of 2 Volts is introduced in (2). From
t=150s on, a parametric variation (vpON) is
introduced, in such a way that (1) becomes
55.5/(26.5s+0.5). At t=150s the reference signal is
changed to 55ºC and at t=250s it is changed to 35ºC.
Figure 2 presents the open loop response, showing a
convergence at about t=150s. So, a performance
requirement for the controllers was the reduction of
that time. Figure 3 shows the behaviour of the PID
acting on ideal conditions. It is possible to note the
convergence at t=100s. Figure 4 shows the
performance of the PID when external disturbances
and model parametric variations are present. It is
very noticeable the effect at the moment of their
application. The IVS-MRAC applied to (2)
neglecting the delay (L=0) may be seen in Figure 5
and perfect tracking is achieved. In introducing the
delay, the SIVS-MRAC must be applied (Figure 6).
Figures 6 and 7 show the SIVS-MRAC with and
without disturbances. It is noteworthy in Figure 7 the
minor influence of vpON (arrow) and no influence
of dON, showing its robustness when compared to
the PID. The control signal is typical of switched
systems (Figure 8), but smoothness is made possible
through appropriate filters without performance
losses. Additionally, the voltage range is within
limits normally used in instrumentation, +/- 10 V.
Modeling and Simulation of a Temperature Robust Control in Grain Drying Systems for Thermal Damage Reduction
563

Figure 2: Open loop response of the thermal plant.
Figure 3: PID – ideal conditions.
Figure 4: PID – with disturbances.
Figure 5: IVS-MRAC acting on the thermal plant with
disturbances but without delay.
Figure 6: SIVS-MRAC – ideal conditions.
Figure 7: SIVS-MRAC - with disturbances.
ICINCO 2012 - 9th International Conference on Informatics in Control, Automation and Robotics
564

Figure 8: Characteristic of the SIVS-MRAC control
signal.
5 CONCLUSIONS
This work presented the successfully computational
simulation of a nonlinear robust controller, named
SIVS-MRAC, applied to the mathematical model of
a drying grain system. The simulation results
suggest that the proposed strategy aggregates
robustness to external disturbances typical in
agroindustrial facilities and, thus, it gives more
quality to the dried grains. As suggestions and
perspectives of future works, modifications in the
algorithm should be made to reduce the control
signal magnitude and increase its smoothness, the
practical experiment and the physical-chemical
analysis of the grains when dried by different
temperature control strategies. Further, the SIVS-
MRAC will be embedded in microcontrollers,
Digital Signal Processors (DSP) or Field Array
Programmable Devices (FPGA).
ACKNOWLEDGEMENTS
The authors would like to thank the National
Council of Scientific and Technological
Development (CNPq) – Brazil - for the financial
support, through process n. 473707-2009-8.
REFERENCES
Agnew, J., 2012. Automatic Control System for Natural
Air Drying of Grain. Applying Technology for
Agriculture. Agronomy Update. Avaiable at: http://
www1.agric.gov.ab.ca/$Department/deptdocs.nsf/all/c
rop13835/$FILE/au-2012-agnew-control-nad-systems.
pdf.
Fernandes, M. V. A., Dias, S. M., Araujo, A. D., Oliveira,
J. B., Queiroz, K. I. Shunt Indirect Variable Structure
Model Reference Adaptive Controller for Plants with
Arbitrary Relative Degree. In: 11
th
IEEE International
Workshop on Variable Structure Systems, p. 283-288,
2010.
Forbes, J. F., Jacobson, B. A., Rhodes, E., Sullivan, G. R.,
1984. Model Based Control Strategies for Commercial
Grain Drying Systems. The Canadian Journal of
Chemical Engineering, vol. 62, n. 6, p. 773-779.
Hsu, L., 1997. Smooth Sliding Control of Uncertain
Systems Based on a Prediction Error. International
Journal of Robust and Nonlinear Control, vol. 7, p.
353-372.
Hsu, L., Costa, R. R., 1989. Variable Structure Model
Reference Adaptive Control Using Only Input and
Output Measurements – Part I. International Journal
of Control, vol. 49, n. 2, p. 399-416.
Oliveira, J. B., Araujo, A. D., Dias, S. M., 2010.
Controlling the Speed of a Three-Phase Induction
Motor using a Simplified Indirect Adaptive Sliding
Mode Scheme. Control Engineering Practice, vol. 18,
n. 6, p. 577-584.
Oliveira, J. B., Araujo, A. D., 2008. Design and Stability
Analysis of an Indirect Variable Structure Model
Reference Adaptive Control. International Journal of
Control, vol. 81, n. 12, p. 1870-1877.
Kemp, I. C. 2007. Drying Software: past, present, and
future. Drying Technology, vol 25, n. 7-8, p. 1249-
1263.
Rohrs, C. E., Valavani, L. S., Athans, M., Stein, G.
Robustness of Continuous-Time Adaptive Control
Algorithms in the Presence of Unmodeled Dynamics,
1985. IEEE Transactions on Automatic Control, vol.
AC-30, n, 9, p. 881-889.
Utkin, V., 1978. Sliding Modes and their Application in
Variable Structure Systems. Moscow: MIR.
Modeling and Simulation of a Temperature Robust Control in Grain Drying Systems for Thermal Damage Reduction
565
