
Hierarchical Planning of Modular Behaviour Networks
for Office Delivery Robot
Jong-Won Yoon and Sung-Bae Cho
Department of Computer Science, Yonsei University, 50 Yonsei-ro, Seodaemun-gu, 120-749, Seoul, Korea
Keywords: Office Delivery Robot, Hybrid Robot Control, Behaviour Networks.
Abstract: This paper proposes a hybrid architecture based on hierarchical planning of modular behaviour networks for
generating autonomous behaviours of the office delivery robot. Behaviour networks suitable for goal-
oriented problems are exploited for the architecture, where a monolithic behaviour network is decomposed
into several smaller behaviour modules. In order to construct and adjust sequences of the modules the
planning method considers the sub-goals, the priority in each task and the user feedback. It helps a robot to
quickly react in dynamic situations as well as achieve global goals efficiently. The proposed architecture is
verified on both the Webot simulator and Khepera II robot in office environment with delivery tasks.
Experimental results confirms that a robot can achieve goals and generate module sequences successfully
even in unpredictable situations, and the proposed planning method reduces the elapsed time during tasks by
17.5%.
1 INTRODUCTION
Due to the advancement of robotic technology
service robots are supporting people in their daily
activities (Huttenrauch et al., 2004). Especially, the
mobile robots in the office environment are very
helpful for users to conduct routine tasks. Several
control structures for the office delivery robots have
been proposed with various approaches (Beetz et al.,
2001; Chung and Williams, 2003; Milford and
Wyeth, 2010; Ramachandran and Gupta, 2009).
The conventional planning-based methods have
been adopted to generate behaviours of mobile
robots in well-known environments. They can
generate the behaviour sequences optimized in
predefined environments, but have the difficulty of
low flexibility in complex environments. On the
other hand, reactive systems can generate behaviours
quickly based on environmental stimuli in complex
domains (Mataric, 1998). But it also has the
difficulty to generate behaviours robustly when
consistency or stability is insufficient. These
characteristics facilitate hybrid behaviour generation
architectures of the deliberative and reactive
systems.
In this line of research, we propose a hybrid
architecture composed of several behaviour
networks and planning method, which are regarded
as the reactive and deliberative levels, respectively.
For the service robot, the behaviour-based method is
more appropriate because it is more important to
achieve goals and maintain autonomy. In this reason,
the proposed architecture exploits the behaviour
networks for autonomous behaviours of the office
delivery robot, which have been known as useful in
goal-oriented problems (Nicolescu and Mataric,
2002; Weigel et al., 2002; Yoon and Cho, 2010; Lim
et al., 2009).
In a real-world environment like office,
delivery robots interact with environments and there
are chances to face with various new circumstances
during their tasks. To deal with these points, many
researchers tried to propose the structures of office
delivery robots with several different approaches.
Chung and Williams divided the original problem
into several sub-problems to perform plans by
reducing the complexity of the problem (Chung and
Williams, 2003) and Ramachandran and Gupta
proposed POMDP-based reinforcement learning for
delivery robot (Ramachandran and Gupta, 2009).
Some reactive methods look like similar to the
proposed method that can deal with environmental
changes without environmental information. But hey
have the limitation to achieve only local goals and
react to current exceptions without any consideration
of global goals.
14
Yoon J. and Cho S..
Hierarchical Planning of Modular Behaviour Networks for Office Delivery Robot.
DOI: 10.5220/0003982100140020
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 14-20
ISBN: 978-989-8565-22-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
To work out this problem, some hybrid
architectures have been proposed. Milford and
Wyeth used different obstacles and experience maps
for local and global navigations, respectively
(Milford and Wyeth, 2010). The method used low-
level controls for reactive actions that were managed
by high-level controls. The proposed method is
based on reactive approaches because it mainly use
behaviour networks but the planning is externally
placed at higher level to control them dynamically
by considering the global goals in order to overcome
the limitations of conventional reactive methods.
2 HYBRID ARCHITECTURE
The proposed architecture for the autonomous office
delivery robot to generate behaviours consists of two
levels. Lower level includes behaviour network-
based modules which can reflect temporary
environmental changes, and upper level, a
deliberative system, controls the goals and plans
flexibly according to situations.
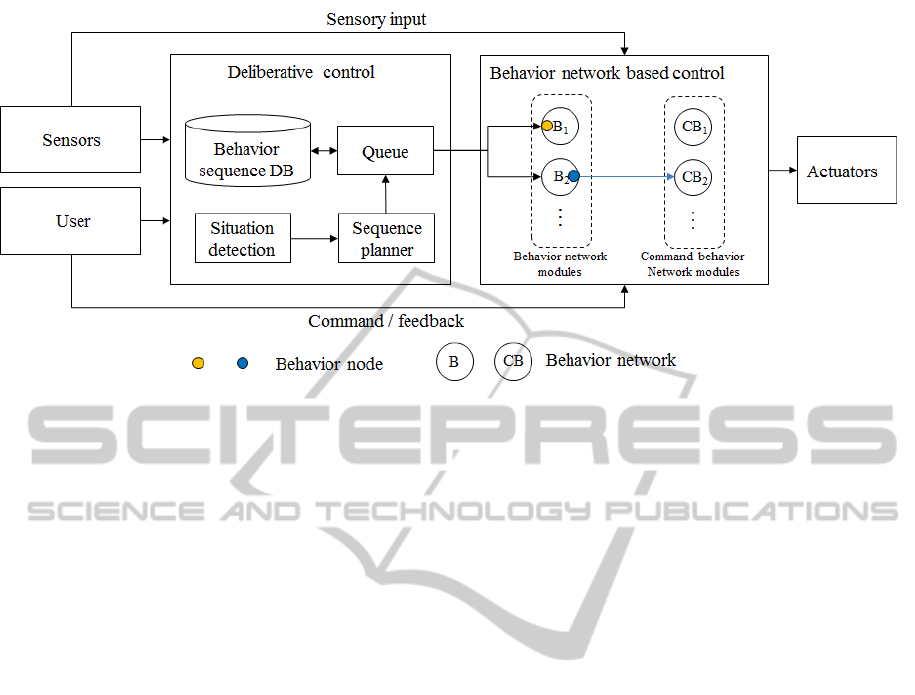
Figure 1 shows the proposed architecture of the
hybrid behaviour network system. The behaviour
network-based control includes the specific
behaviour networks and the common behaviour
networks, and the deliberative plan control.
2.1 Behaviour Network Modules
Contrary to the conventional reactive systems, the
behaviour network not only generates behaviors
instantly but also has goals, with which can solve
some simple planning problems. However, as the
problem gets more complex, it is difficult to select
behaviours accurately with only one monolithic
network (Decuqis and Ferber, 1998; Tyrell et al.,
1993). In order to overcome this shortcoming, the
behaviour network is divided into several modules.
The objectives of the modularized behaviour
networks are as follows.
The modular behaviour network is easier to be
designed and reused than one monolithic
network (Nicolescu and Mataric, 2002).
Confusions which can be occurred when
selecting behaviors in one large flat network
can be reduced by giving only one goal to each
smaller network module (Tyrell et al., 1993).
Each module in the proposed architecture has a
behaviour network oriented to single corresponding
goal. The behaviour network is used as the method
for selecting the most natural and suitable
behaviours for the situations. The behaviour
networks are the model that consists of relationships
between behaviours, a goal, and external
environment, and selects the most suitable behaviour
for the current situation.
In the behaviour network, behaviours, external
environments and internal goals are connected with
each other through links. Each behaviour contains
preconditions, an add list, a delete list and an
activation. The preconditions are a set of conditions
that must be true in order to execute behaviours. The
add list is a set of conditions that are highly likely to
be true when behaviours are executed. The delete list
is a set of conditions that are likely to be false when
the behavioural entities are executed. The activation
represents to what extent the behavioural entity is
activated.
Figure 1: Architecture of the proposed hybrid behaviour network system.
HierarchicalPlanningofModularBehaviourNetworksforOfficeDeliveryRobot
15
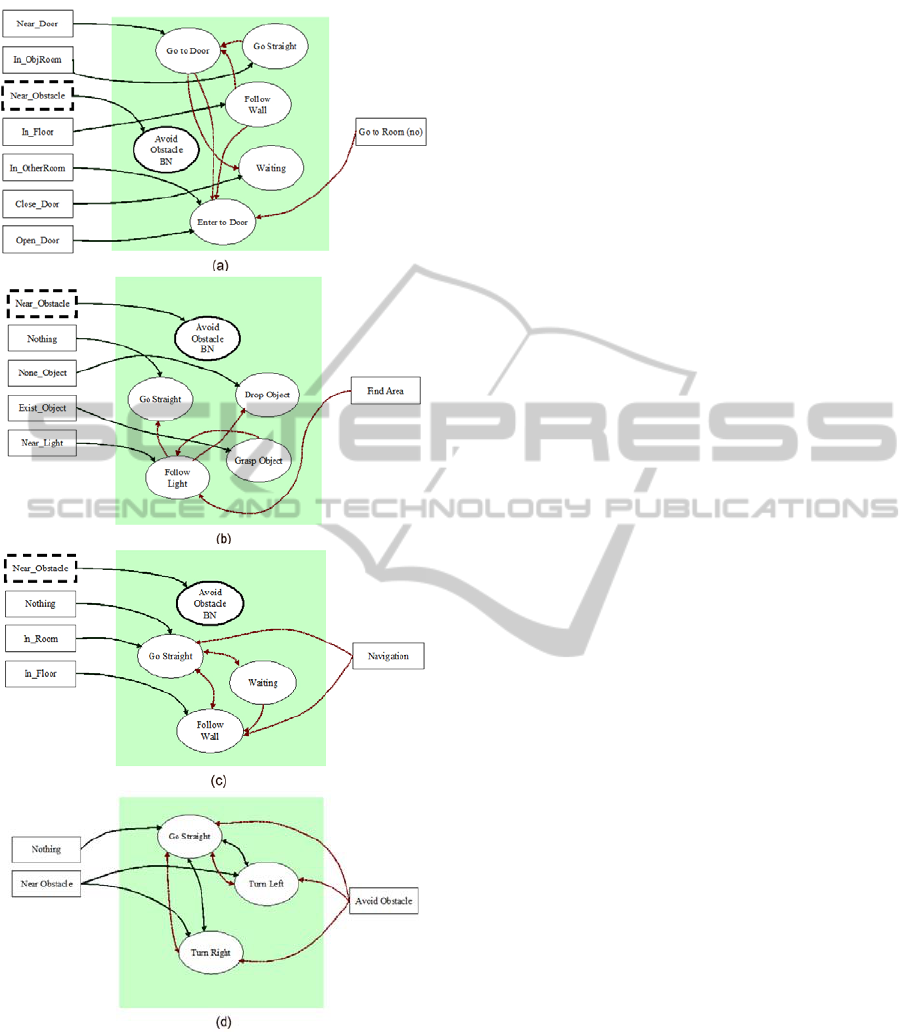
Figure 2: The behaviour networks designed.
The activation energies of behaviours firstly
induced from external environments and the goal.
The activation of the ith behaviour A
i
can be
presented as follows:
(1)
where w
e
and w
g
are the weights to induce activation
energies from environments and goal respectively.
E
i,n
and G
i,m
represent whether the nth environment
element and the mth goal are connected with the ith
behaviour or not, respectively.
After the first induction, behaviours exchange
their activation energies with other behaviours
considering the type of their links. The behaviour
exchange can be presented as follows:
)1 ,0,, ,(
)(
,,,
,,,
=≠
−++=
∑
jijiji
n
jicjisjipii
CSPji
CwSwPwAA
(2)
where w
p
, w
s
and w
c
are the weights to exchange
activation energies through predecessor, successor
and conflictor links, respectively, and P
i,j
, S
i,j
and C
i,j
represent whether the ith and jth behaviors are
connected by each type of links, respectively.
The behaviour networks have a threshold to
decide which behaviours are executable. Using this,
the behaviour networks select the behaviour where
all the preconditions are true and the activation
energy is larger than the threshold. Unless any
behaviour is selected, the behaviour selection system
constantly reduces the threshold until a behaviour is
selected.
A behaviour network module consists of one
goal, external environments, and behaviour nodes.
Each module is mapped to a sub-goal from the
planning system. If the planning system chooses a
single sub-goal to achieve, the corresponding
behaviour network module is activated and
generates behaviour sequences.
In this paper, we designed two behaviour
network modules–go to a room and find objects–and
two common modules–navigate and avoid obstacles.
Figure 2 shows the behaviour network modules
designed.
2.2 Planning of Goal Sequences
In the deliberative control, the system does not plan
sequences of all primitive behaviours or trajectories,
but plans the sequences of sub-goals to control
behaviour network modules. Since we designed
several small independent behavior modules with
sub-goals, they should be controlled explicitly to
achieve the global goal. To plan goal sequences, the
deliberative module and the behaviour network-
based modules are connected.
)1 ,0,(
,,
,,
=
++=
∑
∑
mini
nm
mignieii
GE
GwEwAA
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
16

Since the behaviour networks do not have any
information about the map of the environment, it is
difficult to perform plans correctly in complex
environments. To deal with this, the deliberative
module checks accomplishments of sub-goals and
controls plans when situations are changed, and the
plan in each behaviour network module controls
only partial behavior sequences to achieve the sub-
goal of the corresponding module.
The deliberative control module makes plan by
deciding priorities of goal sequences to achieve the
global goal and adjusting priorities when exceptions
or feedbacks are occurred. The module uses the
basic behavior library that includes basic sequences
of behaviors required to perform when tasks are
given. The library is defined before the usage, and
can be modified by the feedbacks of the user. When
the user gives tasks, the sequences are planned by
using the library and inserted into the queue. At the
‘Check event’ stage, the robot checks changing of
situations, and adjusts the sequences.
2.2.1 Priority-based Sequence Planning
To plan and adjust the sequences, the priorities of
tasks are used. In this paper, the priority is defined as
the deadline of the delivery required by the user. For
this process, we define several parameters as follows:
: command set
: decomposed command
set
Q= {q
i
:q
i
= d
1
,...,d
k
,i < max
queue
}
: command
queue
X = {W
a
it,
C
ritic
a
l,Min
o
r}
: user feedback set
Firstly, priorities are determined according to the
requested deadline and the order of tasks as shown
below:
(3)
where t
i
and O
i
indicate the remaining time and the
order of the ith task, respectively. Max means the
possible maximum value of the corresponding variable.
Secondly, priorities are adjusted by additionally
considering the position of the robot as follows:
(4)
where S is the current state of the robot, From(i)
indicates the starting point of the ith task, and f(S) is
the priority decided by the feedback.
2.2.2 Sequence Queue and User Feedback
The sequence queue contains feedbacks from the
user. Each of them consists of an index of the user, a
type of command, a deadline, a point of departure,
and a destination. When the feedback is given, the
robot seeks sequences for the corresponding
command and puts the sequences into the queue. If
there is no relevant sequence in the library, the robot
requests feedbacks to the user.
The priorities of behavior modules in the
sequence are computed with the order of the task
and the deadline by using Eq (3) and (4) in the
section 2.2.1. Each module is sorted by the priority
in the sequence queue. For this job, the queue has
information. The front four are input by the user, and
next five are used to manage the plan flexibly.
Each task has the segmented sequence with
subtasks. For example, a single delivery task is split
into the subtask to bring the object from the point of
departure and another subtask to move the object to
the destination. Each task has a check point that
indicates which subtask is performed lastly. The
check point enables to adjust the plan flexibly
according to the change of situations. The subtask
has the sequence of several behaviour modules.
Task adjustments are preceded according to the
position of the robot as follows :
(5)
where Seq(qi) indicates the target command to be
placed instead of q
i
, Pos
i
is a set of positions that q
i
contains, and is the lth behavior in q
i
. For
example, the robot may pass the other room not
required for the task during the movement from the
starting point to the destination. In this case, it
searches the task which the robot should fulfill at its
current location. If the deadline of the task in
progress is greater than the threshold, it changes the
plan to execute the task found with high priority.
Otherwise, it ignores the task found and continues its
previous job.
}{
i
cC =
}}{:}{{ CddD
ii
∈=
)(10
)(
iMax
Max
iMax
i
Fix
OO
t
tt
P −+×
−
=
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎨
⎧
∈
=⋅∋⋅∃
≠
<
=
=
if ),(
)(
and )( if
),(
or )( if
),(
)(
XSSf
SjFromj
SiFrom
qP
θt
SiFrom
qP
qP
jFix
i
iFix
i
Dynamic
) and or (
and Pos
)2(
and Pos
)1(
otherwise ,
(CASE2) if ,
(CASE1) if ,
)(
j
k
objGivedqTakedq
SPos
CASE
θtSPos
CASE
q
dq
q
qSeq
ljlj
j
ik
i
lj
k
i
∃=→=→
=⋅∋⋅∃
>=⋅∋⋅∃
⎪
⎩
⎪
⎨
⎧
→=
li
dq →
HierarchicalPlanningofModularBehaviourNetworksforOfficeDeliveryRobot
17
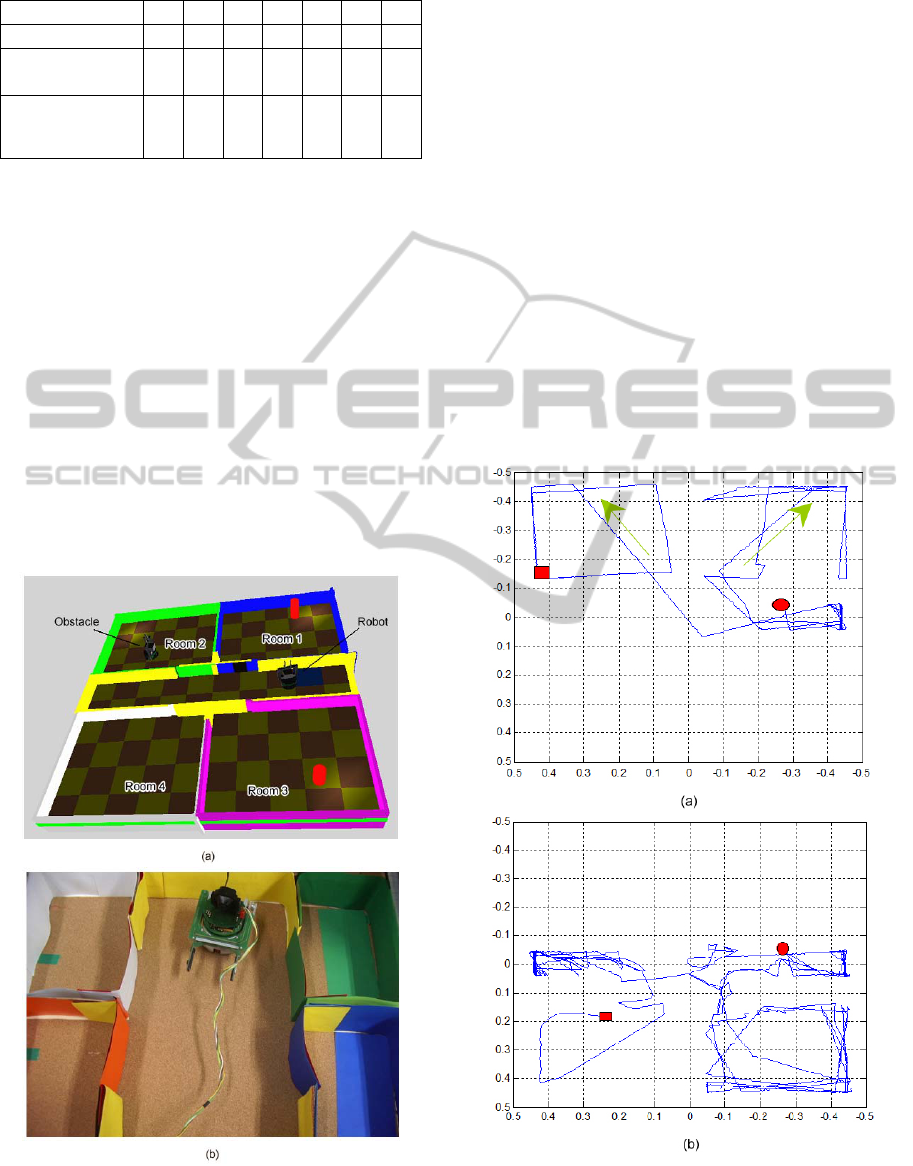
Table 1: Given seven delivery tasks.
Task 1 2 3 4 5 6 7
Deadline 1 1 2 3 1 2 1
Departure
(Room #)
1 3 2 3 1 3 4
Destination
(Room #)
2 1 3 1 4 2 1
3 EXPERIMENTS
In order to show the usefulness of the proposed
architecture, we performed experiments for the
office delivery tasks of the mobile robot.
3.1 Experimental Setup
The hybrid behaviour generation system is applied
to the mobile robot, Khepera II, which has a wireless
camera sensor, eight infra-red sensors, eight light
sensors, one gripper and two motors. The
experiments were performed on both the Webot
simulation environment and a real-world
environment.
Figure 3: The experimental environment with four rooms
and a corridor. (a) simulation, (b) real robot.
For the office delivery tasks, we designed the
office environment which includes four rooms and
one aisle. The colors of each pair of the door and the
room were colored identically; therefore, the robot
can recognize each room by referring the color of
the corresponding door. If some doors had been
closed, we changed colors of them as blacks. Since
the robot does not have any information about the
environment, it should navigate with only
recognized colors of rooms. Figure 3(a) and (b)
show the experimental environment that we
constructed in the simulator and real-world,
respectively.
3.2 Qualitative Analysis
In this section, we analyzed planned goal sequences
from various tasks. We obtained the rates of success
and failure after performing all tasks, and analyzed
changing of the sequences according to errors and
feedbacks from the user.
Figure 4: Trajectories of the robot.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
18
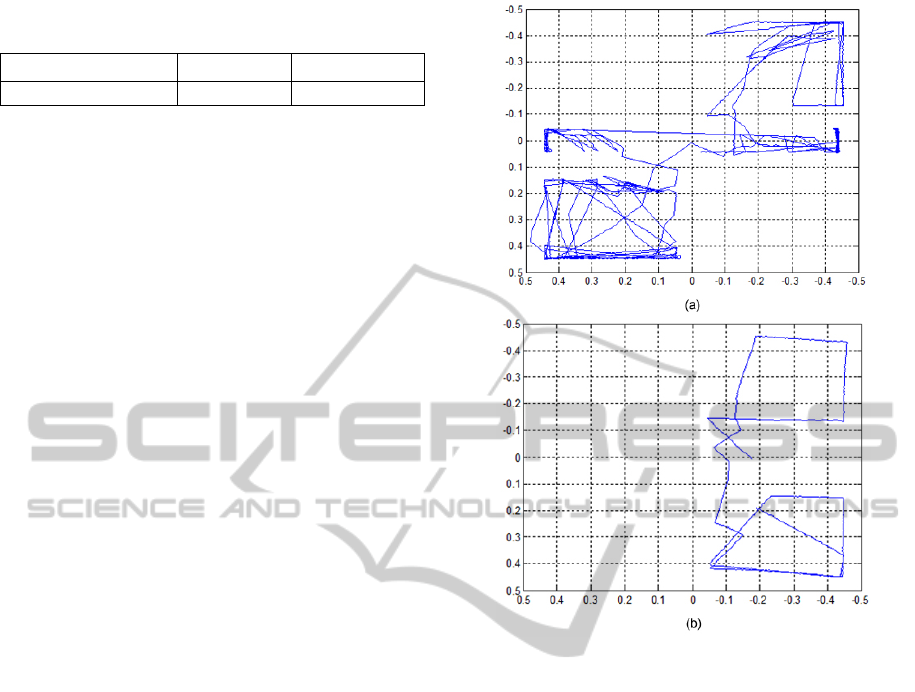
Table 2: Minimum, average, and maximum steps after 30
tasks.
Minimum Average Maximum
804 1,930 5,370
The task of delivering the object from the
specific room A to another room B was given for the
experiments. First of all, we obtained the trajectories
of the robot during the task. Figure 4(a) and (b) are
the trajectories for the delivery task from the room 2
to the room 1 and the task from the room 4 to the
room 3, respectively.
If the robot had been located in the room or at
the corridor, it started the behavior module for
searching the destination and used camera for
sensing since it did not have map information of the
environment. When the robot reached the destination
room, it followed the light to find the object.
Additionally, in order to verify the usefulness of
the sequence adjusting process, we designed seven
delivery tasks shown in Table 1. Experiments were
conducted both with and without sequence
adjustments using the tasks. Sequences of chosen
modules and robot’s location were obtained.
With sequence adjustment processes, the robot
modified its behavior sequence according to its
location. If the robot achieved its goal in the certain
room, it sought the task which can be started at the
room. As the result, it reduced steps wasted at the
corridor. The robot finished all the tasks within
3,956 steps without sequence adjustments, but it
completed within 3,264 steps, 17.4% reduced, with
adjustment processes.
3.3 Quantitative Analysis
For quantitative analysis, we obtained the elapsed
time during tasks. We initially located the robot
randomly and made it to repeat random delivery
tasks 30 times. Table 2 shows minimum, average,
and maximum steps after tasks.
Figure 5(a) and (b) show the trajectories
obtained from results with maximum and minimum
steps, respectively. The task from the room 4 to the
room 2 took the smallest steps. Otherwise, the
maximum steps were taken in the case that the robot
was initially located at the corridor because it took
long time to find the target room according to the
state of the sensors. Even though the robot started
the task at the corridor, differences between results
were shown in accordance with the distance between
the room and sensory states.
Figure 5: Trajectories from results with (a) maximum and
(b) minimum steps.
4 CONCLUDING REMARKS
We proposed a hybrid behaviour system for an
autonomous mobile robot for office delivery tasks.
The system is oriented to the behaviour network
modules which is useful to perform tasks in real-
world environments. Moreover, a method for
planning is attached to supplement them. The
planning system generates and manages overall
sequences of behaviour modules, and the behaviour
modules achieve several sub-goals by generating
autonomous behaviours quickly.
Experiments were conducted to verify the
usefulness of the proposed architecture. We
implemented a simple office environment in both the
simulator and the real-world with the Khepera II
mobile robot, and designed several delivery tasks.
As the result, it is confirmed that the robot can
achieve the goal even though there are temporary
exceptions, and it changes its plan when adjustments
are required to complete tasks more efficiently.
HierarchicalPlanningofModularBehaviourNetworksforOfficeDeliveryRobot
19

For the future works, the method for learning
structures of networks and controlling them
automatically should be investigated. Moreover, the
proposed architecture should be tested on more
realistic problems.
ACKNOWLEDGEMENTS
This research was supported by the Original
Technology Research Program for Brain Science
through the National Research Foundation of Korea
(NRF) funded by the Ministry of Education, Science
and Technology (2010-0018948). The authors thank
for the valuable assistance to Ms. H.-J. Min who was
a member of Soft Computing Laboratory, Yonsei
University.
REFERENCES
H. Huttenrauch, A. Green, M. Norman, L. Oestreicher,
and K. S. Eklundh, "Involving users in the design of
a mobile office robot," IEEE Trans. on Systems, Man,
and Cybernetics, Part C: Applications and Reviews,
vol. 34, no. 2, pp. 113-124, 2004.
M. Beetz, T. Arbuckle, T. Belker, A. B. Cremers, D.
Schulz, M. Bennewitz, W. Burgard, D. Hahnel, D. Fox,
and H. Grosskreutz, "Integrated, plan-based control of
autonomous robots in human environments," IEEE
Intelligent Systems, vol.15, no.5, pp. 56-65, 2001.
S. H. Chung and B. C. Williams, A Decomposed Symbolic
Approach to Reactive Planning, Master's Thesis, MIT,
2003.
M. Milford and G. Wyeth, "Hybrid robot control and
SLAM for persistent navigation and mapping,"
Robotics and Autonomous Systems, vol. 58, no. 9, pp.
1096-1104, 2010.
D. Ramachandran and R. Gupta, "Smoothed SarSa:
reinforcement learning for robot delivery tasks," In
Proc. of Int'l Conf. on Robotics and Automation, pp.
2125-2132, 2009.
M. J. Mataric, "Using communication to reduce locality in
distributed multi-agent learning," Journal of
Experimental and Theoretical Artificial Intelligence,
vol. 10, no. 3, pp. 357-369, 1998.
M. N. Nicolescu and M. J. Mataric, “A hierarchical
architecture for behavior-based robots,” In Proc. of
First Int’l Joint Conf. on Autonomous Agents and
Multi-Agent Systems, pp. 227-233, 2002.
J.-W. Yoon and S.-B. Cho, "A mobile intelligent synthetic
character with natural behavior generation," In Proc.
of Int’l Conf. on Agents and Artificial Intelligence, pp.
315-318, 2010.
S.-S. Lim, J.-W. Yoon, K.-H. Oh, and S.-B. Cho, "Gesture
based dialogue management using behavior network
for flexibility of human robot interaction," IEEE Int'l
Symp. on Computational Intelligence in Robotics and
Automation, pp. 592-597, 2009.
V. Decuqis and J. Ferber, "An extension of Maes' action
selection mechanism for animats," In Prof. of Fifth
Int'l Conf. on Simulation of Adaptive Behavior, vol. 5,
pp. 153-158, 1998.
T. Tyrell, Computational Mechanisms for Action Selection,
PhD Thesis, University of Edinburgh, 1993.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
20
