
A Generative Traversability Model for Monocular Robot Self-guidance
Michael Sapienza and Kenneth P. Camilleri
Department of Systems & Control Engineering, University of Malta, Msida MSD 2080, Malta
Keywords:
Traversability Detection, Autonomous Robotics, Self-guidance.
Abstract:
In order for robots to be integrated into human active spaces and perform useful tasks, they must be capa-
ble of discriminating between traversable surfaces and obstacle regions in their surrounding environment. In
this work, a principled semi-supervised (EM) framework is presented for the detection of traversable image
regions for use on a low-cost monocular mobile robot. We propose a novel generative model for the occur-
rence of traversability cues, which are a measure of dissimilarity between safe-window and image superpixel
features. Our classification results on both indoor and outdoor images sequences demonstrate its generality
and adaptability to multiple environments through the online learning of an exponential mixture model. We
show that this appearance-based vision framework is robust and can quickly and accurately estimate the prob-
abilistic traversability of an image using no temporal information. Moreover, the reduction in safe-window
size as compared to the state-of-the-art enables a self-guided monocular robot to roam in closer proximity of
obstacles.
1 INTRODUCTION
Giving autonomous robots the ability to explore
and navigate through their environment using
CCD/CMOS cameras has become a major area in
mobile robotics research (DeSouza and Kak, 2002).
This paper addresses the fundamental problem of de-
termining terrain traversability for a mobile robot
equipped with a single camera (Lorigo et al., 1997;
Ulrich and Nourbakhsh, 2000; Santosh et al., 2008;
Katramados et al., 2009).
Even though autonomous guidance has achieved
relative success using active sensors, this task still
remains challenging for robots equipped with vision
sensors (Santosh et al., 2008). However, in addition
to providing local depth information in the vicinity
of the robot, camera information has the potential to
provide long-range traversability information and en-
vironmental semantics (Hadsell et al., 2009; Hoiem
et al., 2007), making it ideal for mobile robot explo-
ration and navigation.
Multiple camera vision has been used for depth
estimation and image analysis (Roning et al., 1990),
however in practice, 3D reconstruction works well for
close objects, with the accuracy diminishing signifi-
cantly with distance from the camera (Michels et al.,
2005; Hadsell et al., 2009). Recent self-guided vehi-
cles used in the DARPA LAGR programme have led
to significant advances in robotic perception systems
(Hadsell et al., 2009; Sofman et al., 2006; Kim et al.,
2007), however the multiple sensors and complexity
of these systems do not address the needs of low-cost
autonomous robots (Katramados et al., 2009; Murali
and Birchfield, 2008). A commonly available web
camera presents a desirable alternative that will be
used in this work, and is motivated by the human abil-
ity to interpret 2D low resolution images (Murali and
Birchfield, 2008).
A self-guided monocular robot needs to extract in-
formation on surrounding objects in order to identify
areas through which it can move. This problem has
been approached by providing the robot with a de-
tailed description of its environment, usually an ex-
plicit geometric or topological map built manually or
extracted from the stereo/monocular vision sensors on
the robot (Kosaka and Kak, 1992; Meng and Kak,
1993; Ohno et al., 1996). Building such representa-
tions of the environment is time-consuming, and con-
strains the limits of operation of the robot to the par-
ticular environment in which the hard-data was col-
lected. For mobile robots that can be used in dynam-
ically changing environments, a basic form of scene
traversability understanding must be available to the
robot (Kim et al., 2007). This computer vision task
forms a basic building block that intelligent systems
will need to gain autonomy, and upon which more
complex behaviours can be built.
Motivated by autonomous Martian landscape ex-
177
Sapienza M. and Camilleri K..
A Generative Traversability Model for Monocular Robot Self-guidance.
DOI: 10.5220/0003983701770184
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 177-184
ISBN: 978-989-8565-22-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

ploration, Lorigo (Lorigo et al., 1997) proposed an
appearance-based approach to traversability detection
in which a rectangular safe-window of pixels towards
the bottom of the captured image is assumed to be
traversable. This appearance-based technique was
shown to work in real-time and was implemented in
various indoor (Ulrich and Nourbakhsh, 2000; San-
tosh et al., 2008), and outdoor (Lorigo et al., 1997;
Katramados et al., 2009) environments. The size of
the safe-window determines the closest safe distance
between the robot and obstacles, for a given camera
pose and optical properties. Thus, a smaller safe-
window will allow greater robot agility and manoeu-
vrability between obstacles in a cluttered environ-
ment. Moreover, reducing the size of the safe-window
allows dynamic obstacles to move closer to the robot
without the risk of being captured in this window.
Due to the real-time requirement of mobile robotic
systems, image region classification must be compu-
tationally efficient. Ulrich (Ulrich and Nourbakhsh,
2000) used a static threshold on the feature his-
tograms of the safe-window pixels to determine im-
age traversability, making this approach unsuitable
for other novel environments that may require differ-
ent thresholds. Santosh (Santosh et al., 2008) based
his method on that of Ulrich stating that the his-
togram threshold is determined from the histogram
entropy, but does not provide any details how this is
achieved. On the other hand, Katramados (Katrama-
dos et al., 2009) determines a classification threshold
from the safe-window histogram peak and mean level,
thus clearly showing that the classification method al-
lows the robot to be used in other novel environments.
However, a histogram with multiple peaks may result
from a safe-window over composite surfaces, thereby
employing multiple thresholds. An interesting simpli-
fied alternative is proposed by Lorigo (Lorigo et al.,
1997), where the area of overlap between the feature
histograms of the safe window and that of rectangu-
lar patches is computed. However a static threshold
on this area is used to assign a traversable or non-
traversable label to each image patch, making it un-
suitable to novel environments without threshold tun-
ing. In this work, we develop a framework that al-
lows the robot to be used in novel environments, as
in (Katramados et al., 2009), and that uses a dis-
similarity measure between image regions as a cue
for traversability, as in (Lorigo et al., 1997). How-
ever, instead of using the feature distributions directly
(Lorigo et al., 1997; Ulrich and Nourbakhsh, 2000;
Santosh et al., 2008; Katramados et al., 2009), we
propose to model the feature dissimilarity distribu-
tion. This allows a probabilistic framework to be used
in which the dissimilarity model parameters are self-
learned in a semi-supervised manner, allowing the
robot to be used in new environments.
The main contribution of this work is a novel gen-
erative model for the classification of traversable im-
age regions with the safe-window approach (cf. Sec-
tion 2.5). In addition to the inherent environment
adaptability provided by the safe-window (Lorigo
et al., 1997; Ulrich and Nourbakhsh, 2000; Santosh
et al., 2008; Katramados et al., 2009), our traversabil-
ity classification method (cf. Section 2) is based
upon a principled framework in which a mobile robot
can also self-learn its model parameters in any novel
environment where the traversable region differs by
some degree to the appearance of obstacles. Simi-
larly to previous safe-window approaches, once the
robot is initialized in a particular environment, it
cannot make a transition to another traversable sur-
face with different appearance properties, unless the
safe-window is reinitialized manually or automati-
cally by means of active sensors. Once initialized
however, our method will allow the model parame-
ters to adapt to the present ground/obstacle dissimi-
larity and varying lighting conditions of the ground
in a semi-supervised manner. In the experimental
section (cf. Section 3) we demonstrate that our ap-
proach allows robust traversability classification on
single image frames without requiring temporal in-
formation (cf. Section 3.1). This means that the al-
gorithm may be used intermittently alongside other
computationally intensive algorithms such as human
gesture recognition. Furthermore, the method is ro-
bust to the reduction in safe-window size, without loss
in classification performance (cf. Section 3.2). This
allows a mobile robot to guide-itself safely and ma-
neuver in a tight corridor space cluttered with obsta-
cles (cf. Section 3.3).
2 METHODS
In this work, traversability detection is accomplished
by adopting the well-known principled probabilistic
framework based on Bayes’ rule to infer the class la-
bel of image regions from traversability cues. The
traversability cues X = hX
1
, X
2
, ...X
j
, ...X
n
i are found
by comparing descriptive feature distributions (cf.
Section 2.1) from oversegmented regions called su-
perpixels (cf. Section 2.2) to those in the safe-
window, by using a dissimilarity metric (cf. Sec-
tion 2.3). Initially, n descriptive feature distributions
h
S
j
and h
M
j
, where j = 1, ..., n, are extracted from im-
age superpixel S and from the safe-window M re-
spectively, as illustrated in Fig. 1. The traversabil-
ity cue values X
j
= x
j
= d(h
S
j
kh
M
j
) are a measure of
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
178
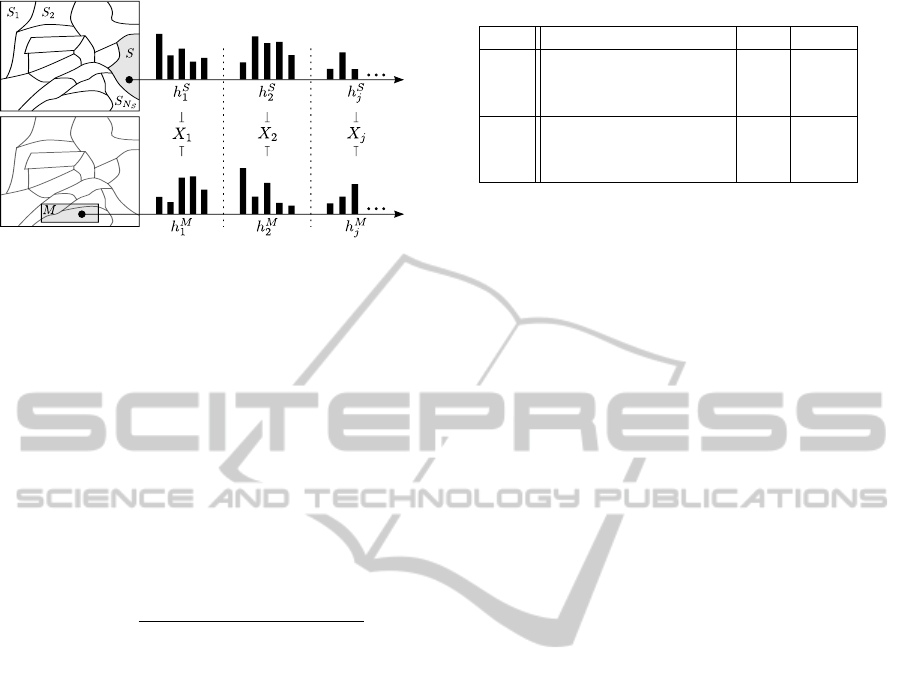
Figure 1: The discrete distributions of the descriptive fea-
tures in each superpixel S are compared to those of the
model in M. For each traversability cue j, a random variable
X
j
is found by comparing the query and model distributions
with a dissimilarity metric.
dissimilarity between the descriptive feature distribu-
tions in S and M. The occurrence of traversability
cue values are modelled by a generative traversability
model (cf. Section 2.5), whose parameters are up-
dated from the traversability cue statistics by means
of the Expectation-Maximization algorithm (cf. Sec-
tion 2.6). Finally, Bayes’ rule is used to calculate
the posterior probability P(Θ|X) of a superpixel be-
ing traversable, given a vector of traversability cues
X:
P(Θ = θ
l
|X) =
P(X|Θ = θ
l
)P(Θ = θ
l
)
∑
m
P(X|Θ = θ
m
)P(Θ = θ
m
)
, (1)
where Θ = θ
l
is a Boolean random variable repre-
senting the l
th
class label of superpixel S, and which
can take on values defined by Θ ∈ {θ
1
, θ
2
}. In this
case, θ
1
and θ
2
represent the traversable and non-
traversable classes respectively.
Assuming conditional independence between
traversability cues X
j
, the most likely class label is
chosen using the maximum a posteriori (MAP) deci-
sion rule by
Θ
∗
← argmax
θ
l
P(Θ = θ
l
)
n
∏
j=1
P(X
j
|Θ = θ
l
). (2)
Note that this probabilistic framework allows a
high degree of flexibility in the choice of descrip-
tive features, image primitives, comparison metrics,
prior, and modelling of the traversability cue values.
Though it is not the purpose of this work to com-
pare different techniques in various stages of the algo-
rithm, this framework affords a straightforward way
to do so. The following subsections will describe the
design choices for each element of the framework.
2.1 Descriptive Features
The set of descriptive features that are considered in
this work were inspired from (Lorigo et al., 1997; Ul-
Table 1: Descriptive Features.
No. j Features Dim. Type
1 Hue colour channel 32
Colour
2 Saturation colour channel 32
3 Illumination Invariant Channel 32
4 Edge gradient magnitudes 32
Texture
5 Edge gradient orientations 9
6 Local Binary Patterns (LBP) 32
rich and Nourbakhsh, 2000; Katramados et al., 2009;
Davidson and Hutchinson, 2003), and are listed in
Table 1. The colour features have been chosen to
minimize the effects of shadows and reflections that
can confuse the classifier (Katramados et al., 2009;
Ulrich and Nourbakhsh, 2000; Lorigo et al., 1997).
The three illumination invariant colour cues consid-
ered are the hue (H) and Saturation (S) channels of
the HSV colour space, and a combination of intensity
invariant channels from the YCbCr and LAB colour
space. This Illumination Invariant Colour channel is
found by a weighted combination of the Cb, Cr, and A
colour channels, as suggested by (Katramados et al.,
2009).
Texture features are also important where colour
information is not sufficient or even present at all. We
consider the edge gradient magnitudes and orienta-
tions as is common in object recognition (Dalal and
Triggs, 2005), and the local texture distributions pro-
vided by the Local Binary Pattern Operator (LBP),
which can be computed very efficiently (Davidson
and Hutchinson, 2003; M
¨
aenp
¨
a
¨
a et al., 2003).
2.2 Oversegmentation
The basic image regions used for traversability classi-
fication have classically been pixels (Ulrich and Nour-
bakhsh, 2000; Katramados et al., 2009) or rectangular
patches (Lorigo et al., 1997). Using pixels may re-
sult in a noisy/spotty classification since pixel neigh-
bourhoods are not considered. Patch based classifica-
tion allows local feature distributions to be extracted,
but may contain multiple object boundaries within
the same region. An oversegmented representation of
the image into superpixels overcomes these shortcom-
ings since superpixels delineate homogeneous pixel
regions whilst preserving the image structure. Thus
rich pixel statistics can be extracted from more per-
ceptually meaningful regions (Kim et al., 2007; San-
tosh et al., 2008; Hoiem et al., 2007).
In this implementation, the initial pixel group-
ing is done using the fast oversegmentation tech-
nique from (Felzenszwalb and Huttenlocher, 2004).
We have used the code publicly released by the au-
thors with the parameters σ = 0.5, k = 100, min =
AGenerativeTraversabilityModelforMonocularRobotSelf-guidance
179
100, where σ is a smoothing constant, k is a thresh-
old which determines how readily image regions are
joined together, and min is minimum superpixel size
(Hoiem et al., 2007).
2.3 Dissimilarity Metric
In the current implementation, the dissimilarity mea-
sure used to compare the superpixel and safe-window
feature distributions is the G-statistic. This dissimi-
larity measure is based on the Kullback–Leibler cross
entropy measure, and was inspired from (M
¨
aenp
¨
a
¨
a
et al., 2003) where it was used to compare the dis-
tributions of local binary patterns.
2.4 Simple Prior
Using the exponential function, a heuristic prior is
constructed which favours superpixels towards the
lower parts of the image to be traversable. Let
the prior likelihood functions for the expectation of
traversable superpixels before seeing the data be ex-
ponentially distributed with rate λ:
P(C|θ
1
) =
1
Y
1
e
−λC
, P(C|θ
2
) =
1
Y
2
1 −e
−λC
.
(3)
Thus, the probability of a superpixel being
traversable given its centre pixel row position C (the
mean superpixel pixel height in the image) may be ex-
pressed by the following equation from Bayes’ rule:
P(Θ = θ
1
|C) =
1
1 +
Y
1
Y
2
(e
λC
− 1)
, (4)
where Y
1
and Y
2
are normalization values updated on
each iteration to ensure the probability over all pos-
sible height values sums to one. The rate parameter
λ fully describes the exponential distribution, and its
Maximum Likelihood Estimate (MLE)
ˆ
λ is the recip-
rocal of the sample mean
¯
C of traversable superpixels
(Garthwaite et al., 2002).
2.5 Generative Traversability Model
The superpixels S in image I originate from either the
traversable (θ
1
) or non-traversable (θ
2
) class. Since
the safe-window M is a priori traversable, when it is
compared to a traversable superpixel, a low dissim-
ilarity is expected (approaching zero). On the other
hand, if the safe window is compared to a superpixel
from the non-traversable class, a large dissimilarity
score is expected (approaching a maximum g
max
).
However, it is also possible to have obstacle regions
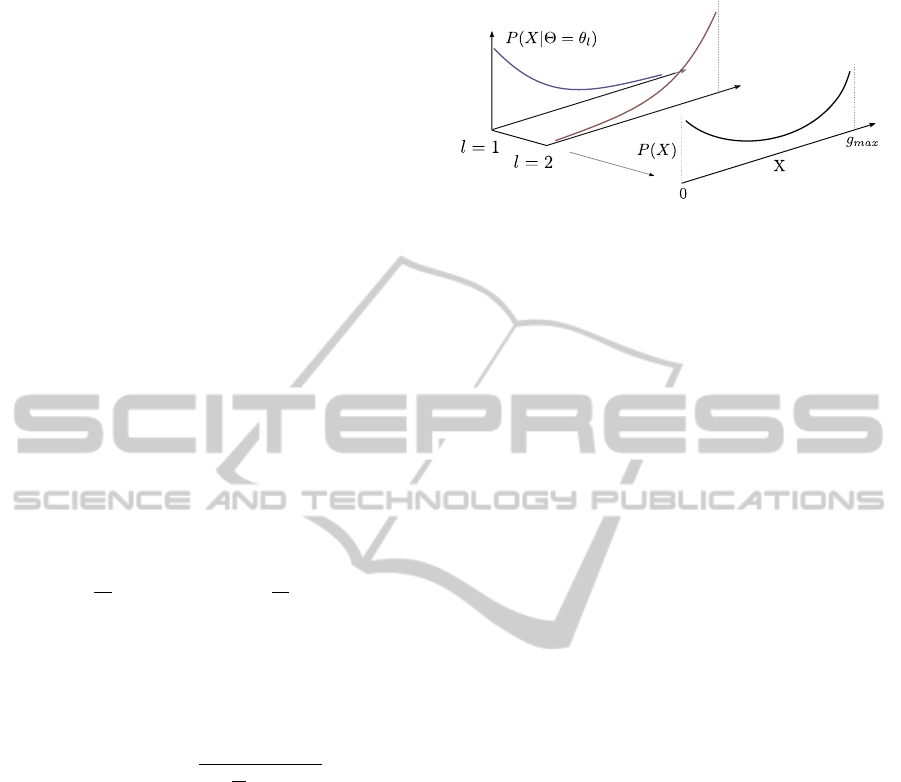
Figure 2: Mixture of two truncated exponential distribu-
tions. The mixture density created by marginalizing over
the hidden variable l, which acts as an identifier for each
truncated exponential distribution.
similar in appearance to the ground, although with a
lower probability. This reasoning can be captured in a
generative model in which the probability of a random
traversability cue X
j
is a mixture of two truncated ex-
ponential distributions, as shown in Fig. 2.
The likelihood functions for the random variable
X
j
, given it was generated by matching a superpixel
from class label θ
l
to the safe-window M is a (one-
sided) truncated exponential which can be expressed
as
P(X
j
|θ
1
) = α
j1
e
−α
j1
X
j
1 − e
−α
j1
g
max
−1
, (5)
P(X
j
|θ
2
) = α
j2
e
α
j2
X
j
(e
α
j2
g
max
− 1)
−1
, (6)
where 0 ≤ X
j
≤ g
max
, and α
jl
> 0 is the rate parameter
of the distribution. The rate parameters need to be
learned from the data and this is achieved using the
EM algorithm which is discussed next.
2.6 Expectation Maximization (EM)
The learning task required here is to output a hypoth-
esis h
j
= hα
j1
, α
j2
i for each traversability cue j, that
describes the rate parameters of the exponential mix-
ture. Since it is not known which distribution gave
rise to the current observation, the EM algorithm will
be used to iteratively re-estimate the parameters given
some current hypothesis:
E-Step. Calculate the expected value E[θ
l
|x
k
, h
j
] that
the l
th
truncated exponential distribution was respon-
sible for the j
th
traversability cue originating from su-
perpixel k, assuming h
j
holds. We will denote this
responsibility by r
k
l
.
M-Step. Calculate the new maximum likelihood hy-
pothesis h
[t+1]
j
= hα
[t+1]
j1
, α
[t+1]
j2
i assuming that the val-
ues for the responsibility r
k
l
were those calculated
from Step 1.
It can be shown that the maximum likeli-
hood estimate for a single exponential distribution
parametrized by α
jl
given the observed data instances
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
180

Table 2: Safe window dimensions used by various authors.
Author Shape Dimensions % Area
Our Model Rectangular
W
3
,
H
8
4.2
Katramados Rectangular
W
2
,
H
4
12.5
Lorigo Rectangular
W
3.2
,
H
6.4
15.6
Ulrich Trapezoidal a =
W
2
, b =
W
1
, h =
H
3.3
22.3
hx
1
, x
2
, ...x
k
, ...x
N
S
i is the reciprocal of the sample
mean (Garthwaite et al., 2002):
ˆ
α
[t+1]
jl
=
1
¯x
[t+1]
jl
, where ¯x
[t+1]
jl
=
∑
k
r
k
l
x
k
j
|S
k
|
∑
k
r
k
l
|S
k
|
, (7)
and |S
k
| is the size of superpixel S
k
in pixels (k =
1, ..., N
S
). This expression is a weighted sample mean
of x
k
j
, where each instance is weighted by the expected
value that it was generated by one of the two exponen-
tial distributions (Mitchell, 1997; Prince, 2011). Note
that since the exponential distribution is truncated, the
mean of the distribution becomes
¯x
0
jl
=
1
ˆ
α
jl
− g
max
e
ˆ
α
jl
g
max
− 1
−1
, where
ˆ
α
0
jl
=
1
¯x
0
jl
,
(8)
and
ˆ
α
0
jl
will be a MLE only if 0 < ¯x
0
jl
<
g
max
2
(Al-
Athari, 2008).
3 EXPERIMENTAL RESULTS &
DISCUSSION
In order to test the validity of our approach, the vi-
sion framework was tested on three datasets: i) a
Static Traversability dataset containing still images,
ii) the Cranfield University dataset containing video
sequences acquired from a teleoperated robot (Katra-
mados et al., 2009), and iii) a Self-Guided dataset
captured from a low-quality webcam during robot
autonomous guidance. All images were reduced to
a resolution of 160 × 120 and the size of the safe-
window was set to:
W
3
,
H
8
, whose top left corner is lo-
cated at position
W
3
,
H
7
, where W , H are the width and
height of the image respectively. The various safe-
window sizes used in the literature are compared in
Table 2.
3.1 Static Traversability Dataset
This dataset is made up of 100 challenging images
of indoor and outdoor scenes picked from the Inter-
net. These images contain scenes with highly reflec-
tive surfaces, specular reflections and traversable re-
gions with varying amount of colour and texture, as
Figure 3: A sample of surfaces classified in the Static
Traversability dataset including indoor tiling, dirt roads,
textured carpets and wet roads with specular reflections.
The red highlighted area shows the accessible traversable
region. The white box towards the bottom of the image de-
notes the position of the safe-window.
shown in Fig. 3. Ground truth information was ob-
tained through manual labelling of the traversable im-
age regions by a human observer, and is made avail-
able online
1
.
3.1.1 Generative Model Validation
In this experiment, the traversability cues obtained
from the 100 images in the Static Traversability
dataset are accumulated in a histogram, shown in
Fig. 4(a). The shape of the histogram shows that the
distribution of the traversability cues X can in fact be
modelled as the joint mixture of two truncated expo-
nential distributions and demonstrates the suitability
of our proposed generative traversability model.
3.1.2 Image Classification & EM Initialization
Sensitivity
The objective of this experiment was to test the ac-
curacy of traversability classification on images from
multiple scenes with no temporal information. Each
test image was subjected to 100 random initializations
where the rate parameters α
jl
and truncation point
g
max
were randomly initialized to values within the
range [0.01 - 10.01]. The algorithm was allowed to
iterate until the parameters converged, or up to a max-
imum of 10 iterations.
The mean TPR and FPR obtained for each im-
age, together with one standard deviation is shown
in Fig. 4(b). Images which always converged to
the same result have zero standard deviation. Those
points with a large cross-size resulted from images
which converged to different TPR-FPR results. Over-
all, 89% of the images converged to 1 - 2 identical
FPR-TPR values, and the mean classification accu-
racy was 91.62% with a standard deviation of 8.78%.
The model parameters α
jl
typically converged within
3-5 iterations, with respective processing times vary-
ing from 80-150ms. This result demonstrates the
model robustness to random initialization, and the
adaptability of its classification model parameters to
multiple types of indoor and outdoor environments
1
Visit: https://sites.google.com/site/mikesapi
AGenerativeTraversabilityModelforMonocularRobotSelf-guidance
181

(a)
0.0 0.2 0.4 0.6 0.8 1.0
0.0 0.2 0.4 0.6 0.8 1.0
False positive rate
True positive rate
(b)
Figure 4: (a) Histogram of normalized traversability cues X
accumulated from the Static Traversability dataset, which
demonstrates the suitability of our generative traversability
model (cf. Section 2.5). (b) ROC plot showing the mean
and one standard deviation resulting from the static image
classification.
with no temporal model, in contrast to (Katramados
et al., 2009) which uses a temporal memory model.
Note that the output of our algorithm can be extended
by a tracking algorithm which incorporates tempo-
ral and kinematic information. Errors occurred where
more than one ground type was present in the image,
of which one was not represented in the safe-window,
and when obstacle regions had a similar appearance
to the ground.
3.2 Cranfield University Dataset
This dataset provided by Katramados et al. (Katra-
mados et al., 2009), consists of eight outdoor video
sequences captured from a teleoperated mobile robot.
Ground truth labelling was available from the author
at a rate of one frame per second. The video se-
quences were captured over a wide range of outdoor
conditions (cloudy, wet, sunny, shadows), and a range
of terrain types (concrete, grass, soil, tarmac, snow),
as shown in Fig. 5.
This experiment shows that our method can easily
be extended to video sequences and operate in real-
time. Instead of allowing the EM algorithm to con-
verge on each video frame (cf. Section 3.1.2), the cor-
relation between frames allows the algorithm to con-
verge across frames. This reduces the computational
cost to 30-50ms on each image (20-30fps). The accu-
racy results obtained using a 12.5% area safe-window,
a 4.2% area safe-window, and the result Safe-4.2|25 of
discarding 24 out of 25 frames in each sequence are
listed in Table 3. The similar results from Safe-12.5%
and Safe-4.2% demonstrate that the reduction in safe-
window size from 12.5% to just 4.2% of the image
area did not reduce the accuracy of the algorithm.
This makes it more suitable for self-guided robots to
move about in the proximity of obstacles, as detailed
in the Self-guided experiment. The ROC plots for the
4.2% area safe-window results are shown in Fig. 6,
Table 3: Cranfield University dataset results.
Safe-12.5% Safe-4.2% Safe-4.2|25
Conditions %Acc %Std %Acc %Std %Acc %Std
Cloudy Dry 95.11 2.11 95.35 2.57 94.91 4.40
Cloudy Wet 93.54 3.94 93.74 4.53 92.15 11.12
Cloudy Muddy 91.63 4.00 89.30 6.62 81.49 15.28
Sunny Wet 82.13 9.49 82.32 8.88 71.24 12.71
Complex Shadow 83.98 9.10 85.77 6.35 85.20 8.46
Sunny Dry 89.64 4.61 89.71 4.53 84.73 13.99
Strong Shadows 85.23 15.62 88.33 12.42 87.03 14.39
Snow 88.50 10.95 89.19 10.29 89.18 9.93
Mean 88.72 7.48 89.21 7.02 85.74 11.29
Figure 5: Sample images of the classification results taken
from the Cranfield University dataset. The samples were
taken from videos (starting from left): Strong Shadows,
Snow, Cloudy Muddy, Cloudy Wet, Complex Shadows.
where it is seen that our model achieves better perfor-
mance in environments where the ground and obsta-
cles have a contrasting appearance (e.g. Cloudy Dry,
Cloudy Wet, Sunny Dry, Snow), than environments
where the ground obstacle boundary is not easily dis-
criminable (e.g. Cloudy Muddy, Sunny Wet). Drop-
ping 24 out of 25 frames in each video sequence, the
accuracy results in Safe-4.2%|25 were negatively af-
fected, more so in Sunny Wet where the appearance of
the ground is changing very quickly. In the other se-
quences however, this robustness makes it possible to
use the traversability algorithm intermittently along-
side other computationally expensive algorithms. Al-
though the authors of the dataset (Katramados et al.,
2009) reported higher classification rates (97.6% Acc,
2.7% Std) on these video sequences, Katramados et
al. included a temporal model in their framework,
thus a direct comparison of the results is not possible.
The results in (Katramados et al., 2009) are given for
offline classification; in the next sub-section we pro-
vide performance results for online autonomous robot
self-guidance, which is the ultimate purpose of this
system.
3.3 Self-guided Dataset
An experiment was set up in which our ERA-MOBI
mobile robotic platform named VISAR01 was placed
in a previously unknown indoor corridor environment
cluttered with a variety of objects typically found in-
doors: a chair, plant, box, waist paper basket, tool
box, and a person standing in the way. The floor
tiles are a pale grey, making them difficult to dis-
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
182
q
q
q
q
q
q
q
q
q
q
q
q
q
q
q
q
−12
−8
−4
0
4
8
12
q
q
Cloudy Dry
True positive rate
0.0 0.2 0.4 0.6 0.8 1.0
q
q
q
q
q
q
q
q
q
q
q
q
q
q
q
q
−12
−8
−4
0
4
8
12
q
q
Cloudy Wet
True positive rate
0.0 0.2 0.4 0.6 0.8 1.0
q
q
q
q
q
q
q
q
q
q
q
q
q
q
q
q
−12
−8
−4
0
4
8
12
q
q
Cloudy Muddy
q
q
q
q
q
q
q
q
q
q
q
q
q
q
q
q
−12
−8
−4
0
4
8
12
q
q
Sunny Wet
q
q
q
q
q
q
q
q
q
q
q
q
q
q
q
q
−12
−8
−4
0
4
8
12
q
q
Complex Shadows
q
q
q
q
q
q
q
q
q
q
q
q
q
q
q
q
−12
−8
−4
0
4
8
12
q
q
Sunny Dry
False positive rate
0.0 0.2 0.4 0.6 0.8 1.0
q
q
q
q
q
q
q
q
q
q
q
q
q
q
q
q
−12
−8
−4
0
4
8
12
q
q
Strong Shadows
q
q
q
q
q
q
q
q
q
q
q
q
q
q
q
q
−12
−8
−4
0
4
8
12
q
q
Snow
False positive rate
0.0 0.2 0.4 0.6 0.8 1.0
True positive rate
0.0 0.2 0.4 0.6 0.8 1.0
True positive rate
0.0 0.2 0.4 0.6 0.8 1.0
Figure 6: Mean ROC (black dots) and one standard devia-
tion (grey lines) for the classification of video sequences in
the Cranfield University dataset. The curves were plotted
by varying the log posterior ratio at which classification is
decided.
tinguish from the white, untextured wall. In this ex-
periment, the horizon boundary that results from the
classification was used to steer the robot towards the
largest open space (Santosh et al., 2008). The robot
moved at 0.15m/sec and the algorithm was run on ev-
ery frame at 25 fps. A video frame from the camera
together with its corresponding on-line classification
result was saved every 25
th
frame, for a total of 99
frames in the 99 second sequence. Ground truth data
was collected by asking a human observer to man-
ually label the image regions as traversable or non-
traversable.
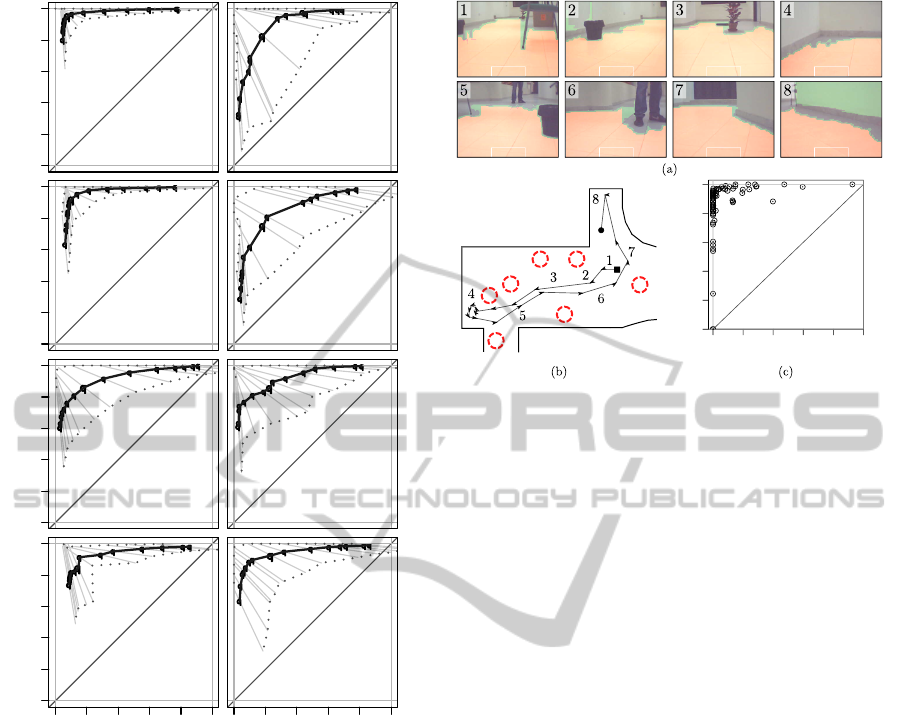
A sample of the resulting traversability classifica-
tion and the path taken by the robot during the au-
tonomous movement can be seen in Fig. 7a&b. The
resulting ROC scatter plot is shown in Fig. 7c. Over-
0.0 0.2 0.4 0.6 0.8 1.0
0.0 0.2 0.4 0.6 0.8 1.0
False positive rate
True positive rate
Figure 7: (a) Samples image results from the Self-Guided
dataset. (b) Illustration of path taken by the robot moving
autonomously through a faculty corridor dotted with static
obstacles (dashed red circles). (c) ROC scatter plot for the
traversable ground classification during self-guidance.
all, the mean and standard deviation of the classifi-
cation accuracy for this successful run were 89.71%
and 9.68% respectively. The low levels of colour and
texture in this sequence made the floor and wall in-
distinguishable at times, however when the robot ap-
proached an obstacle their difference to the ground
became more apparent and therefore this did not con-
fuse the motion of the robot. Despite a high but im-
perfect classification accuracy, the robot successfully
managed its way around the corridor and obstacles us-
ing only a monocular web-camera and turned back on
itself when it encountered a dead-end. As the ground
appearance changes gradually due to changing light-
ing and reflections, the classification model was able
to adapt to these changes. The robot may transit to
a surface with different appearance characteristics by
re-initializing the traversability model and allowing
new model parameters to be self-learned.
4 CONCLUSIONS AND FUTURE
WORK
A real-time vision algorithm has been designed for
a mobile robotic platform to detect traversable ar-
eas and guide itself safely in proximity of obstacles
using the smallest reported safe-window. We have
modelled the feature dissimilarity distribution with a
truncated exponential mixture model and showed the
model’s competence without the need for a tempo-
ral model, prior training, or manual adjustments to
AGenerativeTraversabilityModelforMonocularRobotSelf-guidance
183

the system parametrization. The robustness of the
generative model to initialization, and its ability to
learn the model parameters for textured/untextured,
indoor/outdoor environments have been demonstrated
through experimental analysis and from the many
hours VISAR01 has been allowed to roam out into
the faculty corridors, avoiding both static and dy-
namic objects.
Future work will see the inclusion of structure-
from-motion depth estimation to allow the robot to
transition from one type of surface to another auto-
matically, and new exploration behaviours based on
the probability of traversability, rather than simple bi-
nary classification. This means that instead of merely
moving towards an obstacle-free path determined by
a hard decision (Santosh et al., 2008), the robot may
decide to take the path that has the highest probability
of being traversable.
ACKNOWLEDGEMENTS
The research work disclosed in this publication is par-
tially funded by the Strategic Educational Pathways
Scholarship (Malta). The scholarship is part-financed
by the European Union - European Social Fund (ESF)
under the Operational Programme II - Cohesion Pol-
icy 2007-2013, Empowering People for More Jobs
and a Better Quality of Life.
REFERENCES
Al-Athari, F. (2008). Estimation of the mean of truncated
exponential distribution. Journal of Mathematics and
Statistics, 4(4):284–288.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In IEEE Conf. on Com-
puter Vision and Pattern Recognition, pages 886–893.
Davidson, J. and Hutchinson, S. (2003). Recognition of
traversable areas for mobile robotic navigation in out-
door environments. In IEEE/RSJ Int. Conf. on Intelli-
gent Robots and Systems, pages 297–304.
DeSouza, G. and Kak, A. (2002). Vision for mobile robot
navigation: A survey. IEEE Trans. Pattern Analysis
and Machine Intelligence, 24(2):237–267.
Felzenszwalb, P. and Huttenlocher, D. (2004). Efficient
graph-based image segmentation. Int. Journal of
Computer Vision, 59(2):167–181.
Garthwaite, P., Jolliffe, I., and Jones, B. (2002). Statisti-
cal Inference. Oxford University Press, Inc., second
edition.
Hadsell, R., Sermanet, P., Ben, J., Erkan, A., Scoffier, M.,
Kavukcuoglu, K., Muller, U., and LeCun, Y. (2009).
Learning long-range vision for autonomous off-road
driving. Journal of Field Robotics, 26(2):120–144.
Hoiem, D., Efros, A., and Hebert, M. (2007). Recovering
surface layout from an image. Int. Journal of Com-
puter Vision, 75(1):151–172.
Katramados, I., Crumpler, S., and Breckon, T. (2009). Real-
time traversable surface detection by colour space fu-
sion and temporal analysis. In Int. Conf. Computer
Vision Systems, volume 5815, pages 265–274.
Kim, D., Oh, S., and Rehg, J. (2007). Traversability clas-
sification for UGV navigation: a comparison of patch
and superpixel representations. In IEEE/RSJ Int. Conf.
on Intelligent Robots and Systems, pages 3166–3173.
Kosaka, A. and Kak, A. (1992). Fast vision-guided mo-
bile robot navigation using model-based reasoning
and prediction of uncertainties. In IEEE/RSJ Int. Conf.
on Intelligent Robots and Systems, pages 2177–2186.
Lorigo, L., Brooks, R., and Grimson, W. (1997). Visually-
guided obstacle avoidance in unstructured environ-
ments. In IEEE/RSJ Int. Conf. on Intelligent Robots
and Systems, pages 373–379.
M
¨
aenp
¨
a
¨
a, T., Turtinen, M., and Pietik
¨
ainen, M. (2003).
Real-time surface inspection by texture. Real-Time
Imaging, 9(5):289–296.
Meng, M. and Kak, A. (1993). NEURO–NAV: A neural
network based architecture for vision-guided mobile
robot navigation. In IEEE Int. Conf. on Robotics and
Automation, pages 750–757.
Michels, J., Saxena, A., and Ng, A. (2005). High speed
obstacle avoidance using monocular vision and rein-
forcement learning. In Proceedings 22nd Int. Conf.
on Machine Learning, pages 593–600.
Mitchell, T. (1997). Machine Learning. The McGraw-Hill
Companies, Inc., first edition.
Murali, V. and Birchfield, S. (2008). Autonomous navi-
gation and mapping using monocular low-resolution
grayscale vision. In IEEE Workshop on Computer Vi-
sion and Pattern Recognition, pages 1–8.
Ohno, T., Ohya, A., and Yuta, S. (1996). Autonomous nav-
igation for mobile robots referring pre-recorded im-
age sequence. In IEEE/RSJ Int. Conf. on Intelligent
Robots and Systems, pages 672–679.
Prince, S. (2011). Computer vision models.
Roning, J., Taipale, T., and Pietikainen, M. (1990). A 3-d
scene interpreter for indoor navigation. In IEEE Int.
Workshop on Intelligent Robots and Systems, pages
695–701.
Santosh, D., Achar, S., and Jawahar, C. (2008). Au-
tonomous image-based exploration for mobile robot
navigation. In IEEE Int. Conf. on Robotics and Au-
tomation, pages 2717–2722.
Sofman, B., Lin, E., Bagnell, J., Cole, J., Vandapel, N.,
and Stentz, A. (2006). Improving robot navigation
through self-supervised online learning. Journal of
Field Robotics, 23(11-12):1059–1075.
Ulrich, I. and Nourbakhsh, I. (2000). Appearance-based ob-
stacle detection with monocular color vision. In AIII
Conf. on Artificial Intelligence, pages 866–871.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
184
