
A Framework for Developing Component-based Applications
with Temporal Analysis Capabilities
Francisco S
´
anchez-Ledesma, Juan Pastor, Diego Alonso and Francisca Rosique
Division of Systems and Electronic Engineering (DSIE), Universidad Polit
´
ecnica de Cartagena,
Campus Muralla del Mar, E-30202, Cartagena, Spain
Keywords:
Software Engineering, Component-based Software Development, Model-driven Software Development,
Framework, Software Design Patterns, Real-time, Temporal Analysis.
Abstract:
Reactive system design requires the integration of structural and behavioral requirements with temporal ones
(along with V&V activities) to describe the application architecture. This paper describes an implementation
framework for component-based applications that provides developers with great control over application
concurrency (number of threads and their characteristics), the computational load assigned to them, and allows
the temporal analysis of the applications developed with the framework. The paper presents an improved
version of a framework previously developed, putting it in the context of a global Model-Driven Software
Development approach for developing, analyzing and generating code for reactive applications.
1 INTRODUCTION AND
PREVIOUS WORK
The best way to deal with complexity in software de-
velopment is to raise the abstraction level of model-
ing elements, built systems from independent mod-
ules that interact with each other only through their
interfaces. There is no single definition of what is in
fact a module and each programming paradigm offers
different answers, considering different levels of ab-
straction and granularity.The approach chosen in this
work is the Component Based Software Development
(CBSD), in which a software component is a compo-
sition unit with well-defined interfaces and a explicit
use context.
The work presented here provides an approach
that uses techniques of component based development
to reduce the complexity of applications, not forget-
ting the real-time requirements and focusing on the
temporal analysis.There are other initiatives similar to
the described here, which also consider and discuss
together the issues of CBSD and real-time, as (Barros
et al., 2011) and Palladio (Becker et al., 2009) in gen-
eral and (Schlegel, 2008) in particular for robotics.
In the above context of software development for
components based real-time systems, it was decided
to follow an approach of Model-Driven Software De-
velopment (MDSD) to model this kind of application;
since MDSD is a technology that provides both con-
ceptual and technological support for modeling appli-
cations and for code generation. The MDSD approach
has been used to integrate the CBSD approach with
RT issues, as well as with the generation of both ex-
ecutable code and analysis models. By using MDSD
have been developed in Eclipse (open source devel-
opment platform) the tools necessary to support the
development process.
Although this article focuses on the design of a
framework, called MinFr, and the analysis of the tem-
poral characteristics of the component application; a
brief description of the overall approach is, however,
necessary to understand the rest of the paper. Our
global development approach starts by modeling the
architecture of the application using the CBSD ap-
proach, and then use a series of model transforma-
tions to generate both analysis models and executable
code.
Though any modeling language can be used for
performing the first step, we developed our own
modeling language, entitled V
3
CMM(Alonso et al.,
2008). The V
3
CMM language provides three com-
plementary but loosely coupled views that allows de-
signers to define and connect software components,
namely: (1) an architectural view to define compo-
nents (interfaces, ports, services offered and required,
composite components, etc.); (2) a coordination view
to specify component behavior, based on timed au-
tomata theory (Baier and Katoen, 2008); and finally
315
Sánchez-Ledesma F., Pastor J., Alonso D. and Rosique F..
A Framework for Developing Component-based Applications with Temporal Analysis Capabilities.
DOI: 10.5220/0004023603150318
In Proceedings of the 7th International Conference on Software Paradigm Trends (ICSOFT-2012), pages 315-318
ISBN: 978-989-8565-19-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
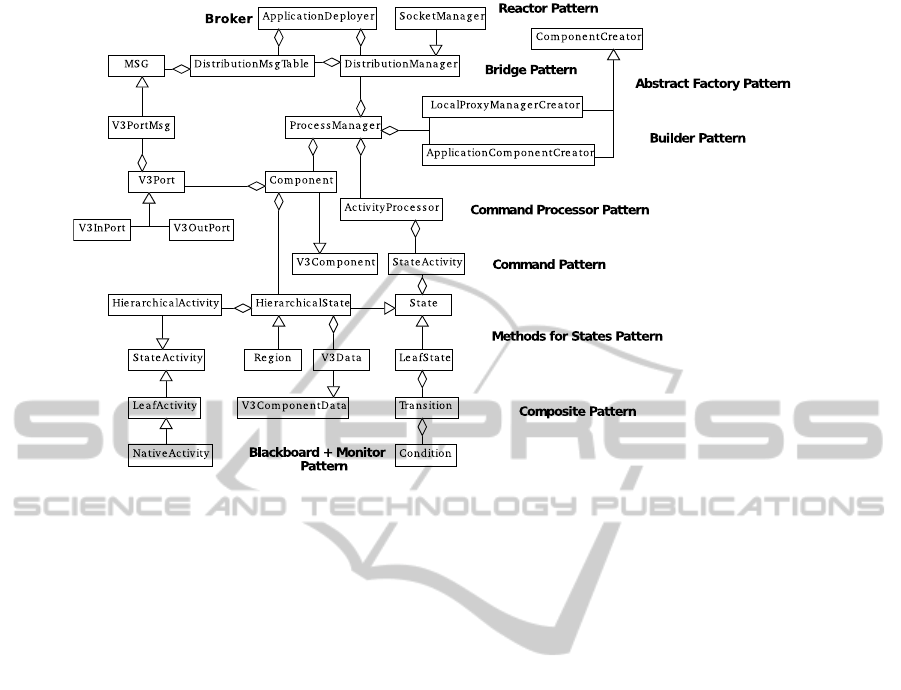
Figure 1: Simplified class diagram of the developed framework showing some of the patterns involved in its design.
(3) the activity code is associated to the state. A de-
tailed description of the main characteristics of this
language and an explanation of the reasons that led us
to its development are not in the scope of this paper,
but they can be found in (Iborra et al., 2009).
In order to ease the generation of executable code
from the V
3
CMM models, an OO framework was
designed and implemented. Such framework pro-
vides an OO interpretation of the CBSD concepts
that allows translating the component based (CB) de-
signs into OO applications. A previous implemen-
tation of MinFr with distribution support was de-
scribed in (Sanchez-Ledesma et al., 2011). This paper
presents an improved version of the cited work with
temporal analysis capabilities.
The rest of the paper is organized as follows: sec-
tion 2 describe the way in which CBSD modeling el-
ements (components, ports and timed automata) have
been translated into OO concepts to generate exe-
cutable programs. Section 3 describes how the anal-
ysis has been addressed temporal component applica-
tions using, in this case, the tool Cheddar (Singhoff
et al., 2009). Finally, Section 4 presents conclusions
and future work.
2 MinFr DESIGN
The design and documentation of MinFr was carried
out using design patterns, which is a common practice
in Software Engineering (Buschmann et al., 2007b).
A pattern sequence has been followed in order to meet
the following architectural drivers:
(AD1) Control over concurrency policy: thread
number, thread spawning (static vs. dynamic poli-
cies), scheduling policy (fixed priority schedulers vs.
dynamic priority scheduler), etc. (AD2) Control over
the allocation of activities to threads, that is, control
over the computational load assigned to each thread,
since V
3
CMM considers the activity associated to a
state as the minimum computational unit. MinFr al-
lows allocating all the activities to a single thread,
allocating every activity to a different thread, or a
combination of both policies. (AD3) Facilitate the
instantiation of MinFr from the input CBSD model.
(AD4) Control over the communication mechanisms
between components (synchronous or asynchronous).
(AD5) Control over the component distribution and
deployment.
Among the aforementioned drivers, the main one
is the ability to define any number of threads and
control their computational load. This computational
load is mainly determined by the activities associ-
ated to the states of the timed automata. In order
to achieve this goal, the COMMAND PROCESSOR ar-
chitectural pattern (Buschmann et al., 2007a) and its
highly coupled COMMAND pattern (Gamma et al.,
1995) have been selected, and they were the firsts to
be applied in MinFr design. The COMMAND PRO-
CESSOR pattern separates service requests from their
execution, by defining a thread (the command pro-
cessor) where the requests are managed as indepen-
ICSOFT2012-7thInternationalConferenceonSoftwareParadigmTrends
316

dent objects (the commands). These patterns pro-
vide the required level of flexibility, since they im-
pose no constraints over command subscription to
threads, number of commands, concurrency scheme,
etc. The roles defined by these two patterns are
realized by the classes Activity Processor and
State Activity, respectively. (see Figure 1).
Another key aspect, related to AD4, is to provide
an OO implementation of the timed automata compat-
ible with the selected patterns for concurrency con-
trol, in order to integrate it in the scheme defined by
the aforementioned COMMAND PROCESSOR pattern.
It is also an aspect that has a great influence on the
whole design, since timed automata model the behav-
ior of the components. We decided that both regions
and states should be treated homogeneously, and thus
we selected a simplified versions of the COMPOSITE
pattern. The timed automata is managed following the
METHODS FOR STATES pattern (Buschmann et al.,
2007a), and the instances of the classes represent-
ing it are stored in a hash table. The roles defined
by this pattern are realized by the classes State,
Hierarchical State, Region and Leaf State.
Each activity associated to a state of the timed
automata is implemented as an object, following
again the COMMAND pattern, represented by the class
State Activity. In this way, activities can be allo-
cated to any command processor. This constitutes the
link between concurrency control and timed automata
implementation, since activities play roles in both
patterns. The distinction between states and regions
led us to define two hierarchies of State Activity,
which were implemented following the STRATEGY
pattern: those associated to leaf states (represented
by the root class Leaf Activity), and those activ-
ities associated to regions (represented by the class
Hierarchical Activity). The latter is aimed at
managing the region states and transitions, and thus is
provided as part of MinFr. The formers, are related
to (i) the activities defined in the V
3
CMM models,
represented by Native Activity subclasses, and
(ii) activities to manage the flow of data and control
among component through their ports.
3 TEMPORAL BEHAVIOR
ANALYSIS
From MinFr instantiation model, obtained from the
V
3
CMM components application model, we proceed
to the generation of a third model, called the deploy-
ment model. With the deployment and MinFr model
can be generated a Cheddar analysis model and the
application code. The transformation that generates
the application code creates instances of framework’s
classes that are necessary for building components
and generates the skeleton of the activities that must
be completed by the programmer. The deployment
model describes how it will distribute the source ap-
plication into two parts: compute nodes and concur-
rent processes.
Once set up and completed the model of applica-
tion deployment, we proceed to generate the Ched-
dar analysis model. Due to the XML format used by
the analysis tool, it has been developed a model to
text transformation using Xtend to generate the file
with the information necessary to carry out the anal-
ysis. The deployment model explicitly defines the
threads (Threads), which correspond directly to ac-
tivities in the Cheddar model(Tasks). The model to
text transformation estimates the period of each one
of these threads as the greatest common divisor of
all the periods of all region activities assigned to the
thread. Each MinFr thread behaves as an cyclic ex-
ecutive and, therefore, it is possible to assign regions
with different periods to the same thread.
Shared resources are not explicitly defined in the
deployment model, but it is possible to determine
which are potentially shared resources. The can-
didates for shared resources between threads are:
events, ports and port connections. Events can be
accessed by the activities and transitions, ports can
be accessed by the activities, transitions, and the up-
date region activity of each component and connec-
tion ports can be accessed by the update region of
each component. To determine whether a resource is
shared by more than one thread, it is necessary to an-
alyze MinFr model to determine what resources each
thread accesses.
The transformation from the V
3
CMM model to
MinFr model adds a number of extra items that are
necessary to define some details of the application
execution. It should be noted the additional region
that is added to each component and is responsible
for managing the ports and communication between
components. Compliance with the requirements of
MinFr, implementation of the code that manages the
operation of it should be under the control of the de-
veloper. Therefore, the developer must also allocate
these additional regions to the threads, like any other
region of the application. In the case of the update
region, determining the resources to be shared is per-
formed in a similar manner, taking into account that
in this case the update region has access to all ports
and ports connections that the component contains.
Thus it is possible to identify candidates for shared
resources. Shared resources will only be those that
are accessed from different threads.
AFrameworkforDevelopingComponent-basedApplicationswithTemporalAnalysisCapabilities
317

4 CONCLUSIONS AND FUTURE
WORK
This paper has described an approach to provide a
run–time support (framework) to a CB approach for
modeling applications with RT requirements. To
do so, it has been necessary to provide an OO in-
terpretation of the high–level architectural concepts
(components, ports, timed automata, etc.), providing
enough flexibility to also control application concur-
rency characteristics in order to take into account RT
requirements.
The adoption of a pattern-driven approach has
greatly facilitated the design of such framework. In
addition, the selected patterns have been described
like a pattern story. A further step would be the def-
inition of a pattern sequence, which comprises and
abstracts the aforementioned pattern story, so that de-
velopers can use it in other applications as long as
they share similar requirements.
This paper also has described the evolution of the
ongoing work, incorporating the ability to distribute
components to an OO framework that support CB de-
velopment. Temporal analysis capacity was added
through a model transformation for generating input
models for analysis tools. Having added temporal
analysis capacities to MinFr, determines that the most
urgent future work is to validate MinFr, using it in
larger applications that comprise both safety critical
requirements in their reactive behavior and intensive
processing. In this way, it is crucial to integrate the
algorithms libraries offered by other robotic frame-
works. This integration is problematic, as is explained
in (Makarenko et al., 2007), but it is crucial to make
the approach (not only MinFr) attractive enough to the
robotics community.
ACKNOWLEDGEMENTS
This work has been partially supported by the
Spanish CICYT Project EXPLORE (ref. TIN2009-
08572), the S
´
eneca Project MISSION-SICUVA
(ref. 15374/PI/10), and the Spanish MEC FPU Pro-
gram (grant AP2009-5083).
REFERENCES
Alonso, D., Vicente-Chicote, C., and Barais, O. (2008).
V3Studio: a Component-Based architecture modeling
language. In 15th Annual IEEE International Con-
ference and Workshop on Engineering of Computer
Based Systems, pages 346–355. ieee.
Baier, C. and Katoen, J. (2008). Principles of Model Check-
ing. The MIT Press.
Barros, L., Lopez, P., and Drake, J. M. (2011). Design of
real-time component-based applications on open plat-
forms. In 37th Euromicro Conference on Software En-
gineering and Advanced Applications (SEAA), pages
65–72.
Becker, S., Koziolek, H., and Reussner, R. (2009). The
palladio component model for model-driven perfor-
mance prediction. Journal of Systems and Software,
82(1):322.
Buschmann, F., Henney, K., and C. Schmidt, D. (2007a).
Pattern-Oriented Software Architecture, Volume 4: A
Pattern Language for Distributed Computing. John
Wiley and Sons Ltd.
Buschmann, F., Henney, K., and Schmidt, D. (2007b).
Pattern-Oriented Software Architecture, Volume 5:
On Patterns and Pattern Languages. John Wiley and
Sons Ltd.
Gamma, E., Helm, R., Johnson, R., and Vlissides, J. (1995).
Design patterns: elements of reusable object-oriented
software. awp.
Iborra, A., Alonso, D., Ortiz, F., Franco, J., Snchez, P., and
lvarez, B. (2009). Design of service robots. IEEE.
Makarenko, A., Brooks, A., and Kaupp, T. (2007). On
the benefits of making robotic software frameworks
thin. In Proc. of the IEEE/RSJ Int. Conf. on Intelligent
Robots and Systems (IROS’07). ieee.
Sanchez-Ledesma, F., Pastor, J., Alonso, D., and Rosique,
F. (2011). An implementation framework for
component-based applications with real-time con-
straints: extensions for achieving component distri-
bution. In Proc. of the 6th International Conference
on Software and Data Technologies (ICSOFT 2011),
pages 290–293. SciTePress.
Schlegel, C. (2008). The challenge of real time robotics
behavior: An applied research perspective. In Proc. of
the 3rd Int. Workshop on Software Development and
Integration in Robotics (SDIR’08).
Singhoff, F., Plantec, A., Dissaux, P., and Legrand,
J. (2009). Investigating the usability of real-time
scheduling theory with the cheddar project. Journal
of Real Time Systems, 43(3):259–295.
ICSOFT2012-7thInternationalConferenceonSoftwareParadigmTrends
318
