
View-based SLAM using Omnidirectional Images
D. Valiente, A. Gil, L. Fern
´
andez and O. Reinoso
System Engineering Department, Miguel Hern
´
andez University, 03202 Elche (Alicante), Spain
Keywords:
Visual SLAM, Omnidirectional Images.
Abstract:
In this paper we focus on the problem of Simultaneous Localization and Mapping (SLAM) using visual infor-
mation obtained from the environment. In particular, we propose the use of a single omnidirectional camera
to carry out this task. Many approaches to visual SLAM concentrate on the estimation of the position of a
set of 3D points, commonly denoted as visual landmarks which are extracted from images acquired at the
environment. Thus the complexity of the map computation grows as the number of visual landmarks in the
map increases. In this paper we propose a different representation of the environment that presents a series
of advantages compared to the before mentioned approaches, such as a simplified computation of the map
and a more compact representation of the environment. Concretely, the map is represented by a set of views
captured from particular places in the environment. Each view is composed by its position and orientation
in the map and a set of 2D interest points represented in the image reference frame. Thus, in each view the
relative orientation of a set of visual landmarks is stored. During the map building stage, the robot captures an
image and finds corresponding points between the current view and the views stored in the map. Assuming
that a set of corresponding points is found, the transformation between both views can be computed, thus
allowing us to build the map and estimate the pose of the robot. In the suggested framework, the problem
of finding correspondences between views is troublesome. Consequently, with the aim of performing a more
reliable approach, we propose a new method to find correspondences between two omnidirectional images
when the relative error between them is modeled by a gaussian distribution which correlates the current error
on the map. In order to validate the ideas presented here, we have carried out a series of experiment in a
real environment using real data. Experiment results are presented to demonstrate the validity of the proposed
solution.
1 INTRODUCTION
The problem of SLAM is of paramount importance in
the field of mobile robots, since a model of the en-
vironment is often required for navigation purposes.
The map building process is complex, since the robot
needs to build a map incrementally, while, simulta-
neously, computing its location inside the map. The
computation of a coherent map is problematic, since
the sensor data is corrupted with noise that affects the
simultaneous estimation of the map and the path fol-
lowed by the robot.
To the present days, approaches to SLAM can
be classified according to the kind of sensor data
used to estimate the map, the representation of the
map and the basic algorithm used for its computa-
tion. For example, due to their precision and robust-
ness, laser range sensors have been used extensively
to build maps (Stachniss et al., 2004; Montemerlo
et al., 2002). In this sense, two map representations
have been typically used: 2D occupancy grid maps
with raw laser (Stachniss et al., 2004), and the extrac-
tion of features from the laser measurements (Monte-
merlo et al., 2002) that are used to build 2D landmark-
based maps.
A subarea in the SLAM community proposes the
utilization of visual information to build the map.
These approaches use cameras as the main sensor and,
in consequence are usually denoted as visual SLAM.
Cameras possess a series of features that make them
attractive for its application to the SLAM problem.
However, vision sensors are generally less precise
than laser sensors and the research focuses on the
methods to extract usable information for the SLAM
process.
In the latter group, we can find a great variety
of camera arrangements. For example, stereo-based
approaches in which two calibrated cameras extract
3D relative measurements to a set of visual land-
marks, being each landmark accompanied by a visual
48
Valiente D., Gil A., Fernández L. and Reinoso O..
View-based SLAM using Omnidirectional Images.
DOI: 10.5220/0004031800480057
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 48-57
ISBN: 978-989-8565-22-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

descriptor computed from its visual appearance (Gil
et al., 2010b). In this approach a Rao-Blackwellized
particle filter is used to estimate the map and path fol-
lowed by the robots. Other approaches propose the
use of a single camera to estimate a map of 3D vi-
sual landmarks and the 6 DOF pose of the camera
(Davison and Murray, 2002) with an EKF-SLAM al-
gorithm. Each visual landmark is detected with the
Harris corner detector (Harris and Stephens, 1988)
and described with a grey level patch. Since the dis-
tance to the visual landmarks cannot be measured di-
rectly with a single camera, the initialization of the
3D coordinates of a landmark poses a problem. This
fact inspired the inverse depth parametrization ex-
posed in (Civera et al., 2008). A variation of the In-
formation Filter is used in (Joly and Rives, 2010) to
estimate a visual map using a single omnidirectional
camera and an inverse depth parametrization of the
landmarks. Also, in (Jae-Hean and Myung Jin, 2003)
two omnidirectional cameras are combined to obtain
a wide field of view stereo vision sensor. In (Scara-
muzza, 2011), the computation of the essential ma-
trix between two views allows to extract the relative
motion between two camera poses, which leads to a
visual odometry. According to (Andrew J. Davison
et al., 2004), the performance of the single-camera
SLAM is improved when using a wide field of view
lens, which suggests the use of an omni-directional
camera in visual SLAM, since, in this case, the hori-
zontal field of view is maximum.
The approach presented in this paper assumes that
the mobile robot is equipped with a single omni-
directional camera. As shown in Figure 1(a), the opti-
cal axis of the camera points upwards, thus a rotation
of the robot moving on a plane is equivalent to a shift
along the columns of the panoramic image captured.
In this paper a different representation of the en-
vironment is proposed. To date, most of the work in
visual SLAM dealt with the estimation of the position
of a set of visual landmarks expressed in a global ref-
erence frame (Davison and Murray, 2002; Gil et al.,
2010b; Andrew J. Davison et al., 2004; Civera et al.,
2008). In this work, we concentrate on a different rep-
resentation of the environment: the map is formed by
the position and orientation of a set of views in the
environment. Each view is composed by an omnidi-
rectional image captured at a particular position, its
orientation in the environment and a set of interest
points extracted from it. Each interest point is accom-
panied by a visual descriptor that encodes the visual
appearance of the point. With this information stored
in the map, we show how the robot is able to build
the map and localize inside it. When the robot moves
in the neighbourhood of any view stored in the map
and captures an image with the camera, a set of in-
terest points will be matched between the current im-
age and the view. Next, a set of correspondences can
be found between the images. This information al-
lows us to compute the relative movement between
the images. In particular, the rotation between images
can be univocally computed, as well as the transla-
tion (up to a scale factor). To obtain these measure-
ments between images we rely on a modification of
the Seven Point Algorithm (Scaramuzza et al., 2009;
Scaramuzza, 2011). This idea is represented in Fig-
ure 1(b), where we show two omnidirectional images
and some correspondences indicated. The transfor-
mation between both reference systems is also shown.
The computation of the transformation relies on the
existence of a set of corresponding points, thus, when
the robot moves away from the position of the stored
view, the appearance of the scene will vary and it may
be difficult to find any corresponding points. In this
case, a new view will be created at the current position
of the robot. The new initialized view allows for the
localization of the robot around its neighbourhood. It
is worth noting that a visual landmark corresponds to
a physical point, such as a corner on a wall. How-
ever, a view represents the visual information that is
obtained from a particular pose in the environment.
In this sense, a view is an image captured from a pose
in the environment that is associated with a set of 2D
points extracted from it. In the experiments we rely on
the SURF features (Bay et al., 2006) for the detection
and description of the points.
We consider that the map representation intro-
duced here presents some advantages compared to
previous visual SLAM approaches. The most impor-
tant is the compactness of the representation of the
environment. For example, in (Civera et al., 2008)
an Extended Kalman Filter (EKF) is used to estimate
the position of the visual landmarks, as well as the
position and orientation of the camera. With this rep-
resentation each visual landmarks is represented by
6 variables, thus the state vector in the EKF grows
rapidly as the number of visual landmarks increases.
This fact poses a challenge for most existing SLAM
approaches. In opposition with these, in the algo-
rithm presented here, only the pose of a reduced set
of views is estimated. Thus, each view encapsulates
information of a particular area in the environment, in
the form of several interest points detected in the im-
age. Typically, as will be shown in the experiments,
a single view may retain a sufficient number of inter-
est points so that the localization in its neighbourhood
can be performed.
Storing only a set of views of the environment has,
however, some drawbacks. We have to face the prob-
View-basedSLAMusingOmnidirectionalImages
49
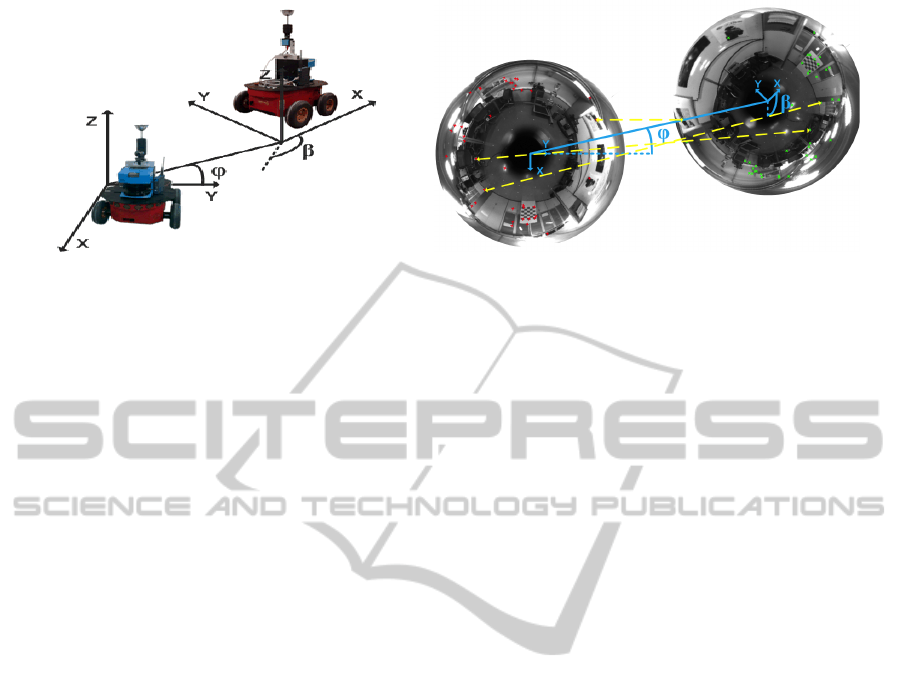
(a) (b)
Figure 1: Figure 1(a) shows the sensor setup used during the experiments. Figure 1(b) presents two real omnidirectional
images, with some correspondences indicated and the observation variables φ and β.
lem of determining a set of correspondences between
two views. Determining a metric transformation be-
tween two omnidirectional images is not trivial in the
presence of false data associations. However, in Sec-
tion 3 we present an algorithm that can be used to
process images at a fast rate for online SLAM. In this
case, the computation of the transformation between
two images depends only on the number of matches,
that can be easily adjusted to provide both speed and
precise results. Moreover we suggest a gaussian prop-
agation of the current error of the map in order to
come up with a reliable scheme of matching, so that
false correspondences are avoided.
We present a series of experiments and their re-
sults obtained trough the acquisition of real omnidi-
rectional images that demonstrate the validity of the
approach. The set of experiments have been carried
out by varying several parameters of the SLAM filter
when using real images captured in an office-like en-
vironment. The paper is organized as follows: Sec-
tion 2 describes the SLAM process using the pro-
posed framework. Next, the algorithm used to esti-
mate the transformation between two omnidirectional
images is described in Section 3. Following, Section 4
presents the experimental results. Finally, Section 5
establishes a discussion to analyze the results.
2 SLAM
This section describes in detail the representation of
the environment as well as the map building process.
As mentioned before, the visual SLAM problem is
set out as the estimation of the position and orienta-
tion of a set of views. Thus, the map is formed by a
set of omnidirectional images obtained from different
poses in the environment. In opposition with other so-
lutions, the views do not correspond to any physical
landmarks or element in the environment (e.g. a cor-
ner, or the trunk of a tree). In our case, a landmark
(renamed view) will be constituted by an omnidirec-
tional image captured at the pose x
l
= (x
l
,y
l
,θ
l
) and
a set of interest points extracted from that image.
In our opinion, this map representation can be
estimated using different kind of SLAM algorithms,
including online methods such as, EKF (Davison
and Murray, 2002), Rao-Blackwellized particle fil-
ters (Montemerlo et al., 2002) or offline algo-
rithms, such as, for example, Stochastic Gradient De-
scent (Grisetti et al., 2007). In this paper we present
the application of the EKF to the proposed map rep-
resentation and explain how to obtain correct results
using real data.
In addition we consider that the map representa-
tion and the measurement model can be also applied
using standard cameras. The reason for using omni-
directional images is their ability to acquire a global
view of the environment in a single image, due to their
large field of view, resulting in a reduced number of
variables to represent the map.
2.1 View-based Map
The pose of the mobile robot a time t will be denoted
as x
v
= (x
v
,y
v
,θ
v
)
T
. Each view i ∈ [1,...,N] is con-
stituted by its pose x
l
i
= (x
l
,y
l
,θ
l
)
T
i
, its uncertainty
P
l
i
and a set of M interest points p
j
expressed in im-
age coordinates. Each point is associated with a visual
descriptor d
j
, j = 1,...,M.
Figure 2 describes this map representation, where
the position of several views is indicated. For ex-
ample, the view A is stored at the pose x
l
A
=
(x
l
A
,y
l
A
,θ
l
A
)
T
in the map and has a set of M points
detected. The view A and C allow for the localization
of the robot in the corridor. The view B represents
the first room, whereas the view D and E represent
the second and third room respectively, and make the
robot capable to localize in the environment.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
50

Thus, the augmented state vector is defined as:
¯x =
x
v
x
l
1
x
l
2
··· x
l
N
T
(1)
where x
v
= (x
v
,y
v
,θ
v
)
T
is the pose of the moving ve-
hicle and x
l
N
= (x
l
N
,y
l
N
,θ
l
N
) is the pose of the N-view
that exist in the map.
2.2 Map Building Process
This subsection introduces an example of map build-
ing in an indoor environment, represented in Figure 2.
We consider that the robot explores the environment
while capturing images with its omnidirectional cam-
era. The exploration starts at the origin denoted as A,
placed at the corridor. At this time, the robot captures
an omnidirectional image I
A
, that is stored as a view
with pose x
l
A
. We assume that, when the robot moves
inside the corridor, several point correspondences can
be found between I
A
and the current omnidirectional
image. Given this set of correspondences, the robot
can be localized with respect to the view I
A
. Next,
the robot continues with the exploration. When it en-
ters the first room, the appearance of the images vary
significantly, thus, no matches are found between the
current image and image I
A
. In this case, the robot
will initiate a new view named I
B
at the current robot
position that will be used for localization inside the
room. Finally, the robot keeps moving through the
corridor and goes into different rooms and creates
new views respectively at these points. The number
of images initiated in the map depends directly on the
kind of environment. In the experiments carried out
with real data we show that typically, a reduced num-
ber of views can be used while obtaining precise re-
sults in the computation of the map.
In addition, SLAM algorithms can be classified as
online SLAM when they estimate the map and the
pose x
v
at time t. Other algorithms solve the full
SLAM problem and estimate the map and the path
of the robot until time t, x
1:t
= [x
v
1
,x
v
2
,...,x
v
t
]. The
EKF is generally classified in the first group, since, at
each time t the filter gives an estimation of the cur-
rent pose x
v
. However, in our case, the position of
the view i coincides with the pose of the robot at any
of the views. In consequence the EKF filter allows
to compute the pose of the robot at time t and, in ad-
dition, a subset of the path followed by the vehicle
formed by the poses x
v
,x
l
1
,x
l
2
,x
l
N
.
2.3 Observation Model
Following, the observation model is described. We
consider that we have obtained two different omni-
directional images captured at two different poses in
Figure 2: Main idea for map building. The robot starts the
exploration from A by storing a view I
A
. While the robot
moves and no matches are found between the current image
and I
A
, a new view is created at the current position of the
robot, for instance in B. The process continues until the
whole environment is represented
the environment. One of the images is stored in the
map and the other is the current image captured by the
robot at the pose x
v
. We assume that given two images
we are able to extract a set of significant points in both
images and obtain a set of correspondences. Next, as
will be described in Section 3, we are able to obtain
the observation z
t
:
z
t
=
φ
β
=
arctan(
y
l
N
−y
v
x
l
N
−x
v
) − θ
v
θ
l
N
− θ
v
!
(2)
where the angle φ is the bearing at which the view
N is observed and β is the relative orientation be-
tween the images. The view N is represented by
x
l
N
= (x
l
N
,y
l
N
,θ
l
N
), whereas the pose of the robot
is described as x
v
= (x
v
,y
v
,θ
v
). Both measurements
(φ,β) are represented in Figure 1(a).
2.4 Initializing New Views in the Map
We propose a method to add new views in the map
when the appearance of the current view differs sig-
nificantly from any other view existing in the map.
A new omnidirectional image is stored in the map
when the number of matches found in the neighbour-
ing views is low. Concretely, we use the following
ratio:
R =
2m
n
A
+ n
B
(3)
that computes the similarity between views A and B,
being m the total number of matches between A and B
and n
A
and n
B
the number of detected points in images
A and B respectively. The robot includes a new view
in the map if the ratio R drops below a pre-defined
threshold. To initialize a new view, the pose of the
view is obtained from the current estimation of the
View-basedSLAMusingOmnidirectionalImages
51

robot pose and its uncertainty equals the uncertainty
in the pose of the robot.
3 COMPUTING A
TRANSFORMATION BETWEEN
OMNI-DIRECTIONAL IMAGES
In this section we present the procedure to retrieve the
relative angles β and φ between two omni-directional
images, as represented in Figure 1(b). As shown be-
fore, these angles compose the observation described
in (2). Computing the observation involves different
problems: first, the detection of feature points in
both images and next, finding a set of point corre-
spondences between images that will be used to re-
cover a certain camera rotation and translation. Tradi-
tional schemes, such as (Kawanishi et al., 2008; Nis-
ter, 2003; Stewenius et al., 2006) apply epipolar con-
strains between both images and solve the problem in
the general 6 DOF case, whereas in our case, accord-
ing to the specific motion of the robot on a plane, we
reduce the problem to the estimation of 3DOF.
3.1 Detection of Interest Points
SURF features (Bay et al., 2006) are used to find in-
terest points in the images and to describe their visual
appearance. In (Gil et al., 2010a), SURF features out-
perform other detectors and descriptors in terms of ro-
bustness of the detected points and invariance of the
descriptor. SURF features have been previously used
in the context of localization (Murillo et al., 2007) us-
ing omnidirectional images. We transform the om-
nidirectional images into a panoramic view in order
to increase the number of valid matches between im-
ages due to the lower appearance variation obtained
with this view.
3.2 Matching of Interest Points
In order to obtain a set of reliable correspondences be-
tween two views, several restrictions have to be con-
sidered. Some authors (Scaramuzza, 2011) rely on the
epipolar geometry to restrict the search of correspon-
dences. The same point detected in two images can
be expressed as p = [x, y, z]
T
in the first camera refer-
ence system and p
0
= [x
0
,y
0
,z
0
]
T
in the second camera
reference system. Then, the epipolar condition estab-
lishes the relationship between two 3D points p and
p
0
seen from different views.
p
0T
E p = 0 (4)
where the matrix E is denoted as the essential matrix
which can be computed from a set of corresponding
points in two images.
E =
0 0 sin(φ)
0 0 −cos(φ)
sin(β − φ) cos(β − φ) 0
(5)
being φ and β the relatives angles that define a pla-
nar motion between two different views, as shown in
Figure 1 and (2).
The epipolar restriction (4) has been previously
used to compute a visual odometry from two consec-
utive views (Scaramuzza, 2011), together with some
techniques such as RANSAC and Histogram voting to
reject false correspondences. In this sense, the com-
putation of the whole set of detected points is needed
in order to find those which satisfy the restriction.
Moreover, in the context of visual odometry, consec-
utive images are close enough to disregard high er-
rors in the pose from where images were taken, so
that the epipolar restriction can be normally applied.
However, focusing on a SLAM framework, there ex-
ists uncertainties in the pose of the robot as well as
in the pose of the views that compose the map. For
this reason, we consider that is necessary to propa-
gate this errors to accomplish a reliable data asso-
ciation. We suggest using the predicted state vector
extracted from the Kalman filter, from which we are
able to obtain a predicted observation measurement
ˆz
t
by means of (2). In order to reduce the search of
valid corresponding points between images, the map
uncertainties have also to be taken into account, so
we propagate them to (4) by introducing a dynamic
threshold, δ. In a idealistic case, the epipolar restric-
tion may equal to a fixed threshold, meaning that the
epipolar curve between images always presents a lit-
tle static deviation. On a realistic SLAM approach,
we should consider that this threshold depends on the
existing error on the map, which dynamically varies
at each step of the SLAM algorithm. Since this er-
ror is correlated with the error on ˆz
t
, we rename δ as
δ(ˆz
t
). In addition, it has to be noted that (5) is de-
fined up to a scale factor, which is another reason to
consider δ(ˆz
t
) as a variable value. As a consequence,
given two corresponding points between images, they
must satisfy:
p
0T
ˆ
E p < δ(ˆz
t
) (6)
This approach allows us to reduce the search for
corresponding points between images. Figure (3)
depicts the procedure. Assuming a detected point
P(x,y,z), it may be represented in the first image ref-
erence system by a normalized vector ~p
1
due to the
unknown scale. To deal with this scale ambiguity, we
suggest a generation of a point distribution to get a
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
52

set of multi-scale points λ
i
~p
1
for ~p
1
. This distribu-
tion considers a valid range for λ
i
according to the
predicted
ˆ
ρ. Please note that the error of the current
estimation of the map has to be propagated along the
procedure. According to Kalman filter theory, the in-
novation is defined as the difference between the pre-
dicted ˆz
t
and the real z
t
observation measurement:
v
i
(k + 1) = z
i
(k + 1) − ˆz
i
(k + 1|k) (7)
and the covariance of the innovation:
S
i
(k + 1) = H
i
(k)P(k +1|k)H
T
i
(k) + R
i
(k + 1) (8)
where H
i
(k) relates ¯x(k) and z
i
(k), P(k + 1|k) is a co-
variance matrix that expresses the uncertainty on the
estimation, and R(k) is the covariance of the gaussian
noise introduced in the process. In addition, S
i
(k + 1)
presents the following structure:
S
i
(k + 1) =
σ
φ
2
σ
φβ
σ
βφ
σ
β
2
(9)
Next, since the predicted
ˆ
E can be decomposed
in a rotation
ˆ
R and a translation
ˆ
T , we can transform
the distribution λ
i
~p
1
into the second image reference
system, obtaining
~
q
0
i
. In order to propagate the er-
ror, we make use of (9) to redefine the transforma-
tion through normal distributions, being R∼N(
ˆ
β,σ
β
)
and T ∼N(
ˆ
φ,σ
φ
). This fact implies that
~
q
0
i
is a gaus-
sian distribution correlated with the current map un-
certainty. Once obtained
~
q
0
i
, they are projected into
the image plane of the second image, seen as crossed
points in Figure 4. This projection of the normal
multi-scale distribution defines a predicted area in
the omnidirectional image which is drawn in contin-
uous curve line. This area establishes the specific
image pixels where correspondences for ~p
1
must be
searched for. The shape of this area depends on the
error of the prediction, which is directly correlated
with the current uncertainty of the map estimation.
Dash lines represent the possible candidate points lo-
cated in the predicted area. Therefore, the problem
of matching is reduced to finding the correct corre-
sponding point for ~p
1
from those candidates inside
the predicted area by comparing their visual descrip-
tor, instead of searching for them at the whole image.
3.3 Computing the Transformation
Once a set of interest SURF points have been detected
and matched in two images it is necessary to retrieve
the relative angles β and φ. In the previous subsec-
tion was introduced the term
ˆ
E for a predicted matrix
to find valid correspondences. Now this set of cor-
responding points is known, the real E can be deter-
mined by directly solving (4). The essential matrix
Figure 3: Given a detected point ~p
1
in the first image refer-
ence system, a point distribution is generated to obtain a set
of multi-scale points λ
i
~p
1
. By using the Kalman prediction,
they can be transform to
~
q
0
i
in the second image reference
system through R∼N(
ˆ
β,σ
β
), T ∼N(
ˆ
φ,σ
φ
) and
ˆ
ρ. Finally
~
q
0
i
are projected into the image plane to determine a restricted
area where correspondences have to be found.
can be expressed as a specific rotation R and a trans-
lation T (up to a scale factor), where E = R · T
x
. The
use of a SV D decomposition makes able to retrieve
R and T . Following (Bunschoten and Krose, 2003;
Hartley and Zisserman, 2004) we obtain the relative
angles β and φ that define a planar motion between
images acquired from different poses. It is worth not-
ing that the motion is restricted to the XY plane, thus
only N = 4 correspondences are sufficient to solve the
problem. Nevertheless we use higher number of cor-
respondences in order to get accurate solutions. No-
tice that now an external algorithm is not necessary
to reject false correspondences since we avoid them
through the restricted matching process, limited to
specific image area as recently explained.
4 RESULTS
We present three diferent experimental sets. Sec-
tion 4.1 firstly presents SLAM results to verify the
validity of this proposed approach of SLAM. In ad-
dition, it presents map building results when varying
the number of views that generate the map in order
to extract conclusions in the sense of the compact-
ness of the representation. Finally, we present results
of accuracy in the obtained map, use of computa-
tional resources and their variation with the number
of views that conform the map. To carry out these
experiments an indoor robot Pioneer P3-AT has been
used, which is equipped with a firewire 1280x960
View-basedSLAMusingOmnidirectionalImages
53

Figure 4: Correspondences for a specific point in the first image are searched for in the predicted area, which is projected
into the second image. Crossed points represent the projection of the normal point distribution for the multi-scale points that
determine this area. Dash lines show the candidate points in the second image which are inside the predicted area. Continue
line represents the correct correspondence for a certain point in the first image. Curve continue line shows the shape of the
predicted area.
camera and a hyperbolic mirror. The optical axis of
the camera is installed approximately perpendicular
to the ground plane, as described in Figure 1(a), in
consequence, a rotation of the robot corresponds to a
rotation of the image with respect to its central point.
Besides, in order to obtain a reference for compari-
son we use a SICK LMS range finder to generate a
ground truth (Stachniss et al., 2004) which provides a
resolution of 1m in position.
4.1 SLAM with Real Data
This section presents SLAM results of map build-
ing to validate the proposed approach. The robot is
guided through an office-like environment of 32x35m
while it acquires omnidirectional images and laser
range data along the trajectory. Laser data is only used
to generate a ground truth for comparison. The robot
initiates the SLAM process by adding the first view
of the map at the origin, as indicated in Figure 5(a).
Next, it keeps on moving along the trajectory while
capturing omnidirectional images. The image at the
current robot pose is compared to the view in the map
looking for corresponding points in order to extract a
relative measurement of its position as explained in
Section 3. The evaluation of the similarity ratio (3)
is also computed, and in case this ratio drops below
R < 0.5, a new view is initialized at the current robot
position with an error ellipse. While the mapping con-
tinues, the current image is still being compared with
the rest of the views in the map. Figure 5(a) shows the
entire process where the robot finishes the navigation
going back to the origin. The dash-dotted line repre-
sents the solution obtained by the proposed approach,
indicating with crosses the points along the trajec-
tory where the robot decided to initiate new views
in the map and their uncertainty with error ellipses.
The continue line represents the ground truth whereas
the odometry is drawn with dash line. As it can be
observed, a map for an environment of 32x35m is
formed by a reduced set of N=9 views, thus leading to
a compact representation. Figure 5(b) compares the
errors for the estimated trajectory, the ground truth
and the odometry at every step of the trajectory. The
validity of the solution is confirmed due to the ac-
complishment of the convergence required by every
SLAM scheme, since the solution error is inside the
2σ interval whereas the odometry error grows out of
bounds.
Once the proposed approach was validated, the
following experiments were carried out with the aim
of testing the compactness of the representation of
the environment. Another office-like environment of
42x32m was chosen. In this case the threshold for
the similarity ratio R were varied in order to get dif-
ferent map representation for the same environment,
in terms of the number of views N that compose
the map. The procedure to build up the map fol-
lows the steps detailed in the first experiment, and
is depicted in Figure 6. Figures 6(a), 6(c), 6(e)
show different map versions for this environment with
N=7, N=12 and N=20 views respectively. Again, the
estimated solution is drawn in dash-dotted line, the
odometry in dash line, meanwhile the ground truth in
continuous line. View’s position are indicated with
crosses and their uncertainty with error ellipses. Fig-
ures 6(b), 6(d), 6(f), present the errors of the esti-
mated solution and the odometry versus 2σ intervals
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
54

3 9 12 15 18 21 24 27 32
35
32
27
24
21
18
15
12
9
6
3
X(m)
Y(m)
Map with N=9 views
Solution Odometry Ground truth
(a)
120 140 160 180 200 220 240 260 280 300
−1.5
−1
−0.5
0
0.5
Error X (m)
0 50 100 150 200 250 300 350 400
−0.5
0
0.5
1
Error θ (rad)
Map Step
0 50 100 150 200 250 300 350 400
−2
−1
0
1
Error Y (m)
Solution error Odometry error
2σ interval
(b)
Figure 5: Figure 5(a) presents results of SLAM using real data. The final map is determined by N=9 views, which their
positions are represented with crosses and error ellipses. A laser-based occupancy map has been overlapped to compare with
the real shape of the environment. Figure 5(b) presents the solution and odometry error in X, Y and θ at each time step.
to test the convergence and validity of the approach
for each N-view map. All three estimations satisfy the
error requirements for the convergence of the SLAM
method, since the solution error is inside the 2σ inter-
val, however the odometry tends to diverge without
limit. According to this results, it should be noticed
that the higher values of N the lower resulting error
in the map. Nevertheless, with the lower value N=7
views, the resulting error is suitable to work in a re-
alistic SLAM problem in robotics. This fact reveals
the compactness of the representation. In some con-
text a compromise solution might be adopted when
choosing between N, error and obviously computa-
tional cost. Next paragraph analysis this issue.
The concept of compactness in the representation
of the map has been comfirmed by the previous re-
sults. It has been observed that lower values of N pro-
vide good results in terms of error. In addition more
experiments to obtain maps with different number of
views N have been carried out. The results allow us to
analyze the computational cost in terms of the num-
ber of views N composing the map. In Figure 7 we
present these results, showing the RMS error in po-
sition and the time consumption, which reveal that
the error decreases when N increases. Consequently,
the accuracy of the estimation is higher since more
views are observed, however the computational cost
grows. That is the reason why a compromise solu-
tion has to be reached. Generally, SLAM algorithms
are real-time intended, so that the time is a limiting
factor. Despite this fact, the approach presented here
provides accurate results even using a reduced set of
views, which is a benefit to consider when there is a
lack of computational resources.
5 CONCLUSIONS
In this paper it has been presented an approach to
the Simultaneous Localization and Mapping (SLAM)
problem using a single omnidirectional camera as a
visual sensor. We suggest a different representation
of the environment. In contrast to traditional 3D pose
estimation SLAM schemes, we only estimate the pose
and orientation of a set of omnidirectional images, re-
named views, as part of the map. A set of interest
points described by visual descriptors are associated
to each omnidirectional image so that a compact de-
scription of the environment is accomplished. Each
omnidirectional image allows the robot to compute its
localization in the image surroundings. A new match-
ing method is suggested to deal with the problem of
finding correspondences. Given two omnidirectional
images an a set of interest points for each one, we
model the relative error between them by means of
a gaussian distribution that correlates the current es-
timation error on the map to help us to compute a
more reliable transformation between images, com-
posed by a rotation and a translation (up to a scale
factor). This transformation allows to propose an ob-
servation model and to compute a trajectory over a
View-basedSLAMusingOmnidirectionalImages
55

0 7 14 21 28 35 42
0
4
8
12
16
20
24
28
32
MAP with N=7 views
X(m)
Y(m)
Solution Odometry Ground truth
(a)
0 50 100 150 200 250
−2
0
2
4
Error X (m)
0 50 100 150 200 250
−5
0
5
Error Y (m)
0 50 100 150 200 250
−2
−1
0
1
Error θ (rad)
Map Step
Solution error Odometry error
2σ interval
(b)
0 7 14 21 28 35 42
0
4
8
12
16
20
24
28
32
MAP with N=12 views
X(m)
Y(m)
Solution Odometry Ground truth
(c)
0 50 100 150 200 250
−5
0
5
Error X (m)
0 50 100 150 200 250
−5
0
5
Error Y (m)
0 50 100 150 200 250
−2
0
2
Error θ (rad)
Map Step
Solution error Odometry error
2σ interval
(d)
0 7 14 21 28 35 42
0
4
8
12
16
20
24
28
32
Map with N=20 views
X(m)
Y(m)
Solution Odometry Ground truth
(e)
0 50 100 150 200 250
−5
0
5
Error X (m)
0 50 100 150 200 250
−5
0
5
Error Y (m)
0 50 100 150 200 250
−2
0
2
Error θ (rad)
Map Step
Odometry error Solution error
2σ interval
(f)
Figure 6: Figures 6(a), 6(c), 6(e) present results of SLAM using real data obtaining different map representations of the
environment, formed by N=7, N=12 and N=20 views respectively. The position of the views is presented with error ellipses.
Figures 6(b), 6(d), 6(f), present the solution and odometry error in X, Y and θ at each time step for each N-view map.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
56

10 20 30 40 50 60 70 80 90 100
0
0.2
0.4
0.6
0.8
RMS error (m)
Number of views N
10 20 30 40 50 60 70 80 90 100
0
0.02
0.04
0.06
0.08
Time (s)
RMS error (m)
Time (s)
Figure 7: RMS error (m) and time consumption (s) versus
the number of views N observed by the robot to compute its
pose inside different N-view maps.
map. We append map building results using an EKF-
based SLAM algorithm with real data acquisition us-
ing an indoor robot, to validate the SLAM approach.
In addition we have shown the compactness of the en-
vironment representation by building maps with dif-
ferent number of views. Finally we presented a set of
measurements to test the accuracy of the solution and
the time consumption as a function of the number of
views that conform the map.
ACKNOWLEDGEMENTS
This work has been supported by the Spanish govern-
ment through the project DPI2010-15308.
REFERENCES
Andrew J. Davison, A. J., Gonzalez Cid, Y., and Kita, N.
(2004). Improving data association in vision-based
SLAM. In Proc. of IFAC/EURON, Lisboa, Portugal.
Bay, H., Tuytelaars, T., and Van Gool, L. (2006). SURF:
Speeded up robust features. In Proc. of the ECCV,
Graz, Austria.
Bunschoten, R. and Krose, B. (2003). Visual odometry
from an omnidirectional vision system. In Proc. of
the ICRA, Taipei, Taiwan.
Civera, J., Davison, A. J., and Mart
´
ınez Montiel, J. M.
(2008). Inverse depth parametrization for monocular
slam. IEEE Trans. on Robotics.
Davison, A. J. and Murray, D. W. (2002). Simultaneous lo-
calisation and map-building using active vision. IEEE
Trans. on PAMI.
Gil, A., Martinez-Mozos, O., Ballesta, M., and Reinoso, O.
(2010a). A comparative evaluation of interest point
detectors and local descriptors for visual SLAM. Ma-
chine Vision and Applications.
Gil, A., Reinoso, O., Ballesta, M., Juli
´
a, M., and Pay
´
a, L.
(2010b). Estimation of visual maps with a robot net-
work equipped with vision sensors. Sensors.
Grisetti, G., Stachniss, C., Grzonka, S., and Burgard, W.
(2007). A tree parameterization for efficiently com-
puting maximum likelihood maps using gradient de-
scent. In Proc. of RSS, Atlanta, Georgia.
Harris, C. G. and Stephens, M. (1988). A combined corner
and edge detector. In Proc. of Alvey Vision Confer-
ence, Manchester, UK.
Hartley, R. and Zisserman, A. (2004). Multiple View Geom-
etry in Computer Vision. Cambridge University Press.
Jae-Hean, K. and Myung Jin, C. (2003). Slam with omni-
directional stereo vision sensor. In Proc. of the IROS,
Las Vegas (Nevada).
Joly, C. and Rives, P. (2010). Bearing-only SAM using a
minimal inverse depth parametrization. In Proc. of
ICINCO, Funchal, Madeira (Portugal).
Kawanishi, R., Yamashita, A., and Kaneko, T. (2008). Con-
struction of 3D environment model from an omni-
directional image sequence. In Proc. of the Asia Inter-
national Symposium on Mechatronics 2008, Sapporo,
Japan.
Montemerlo, M., Thrun, S., Koller, D., and Wegbreit, B.
(2002). FastSLAM: a factored solution to the simul-
taneous localization and mapping problem. In Proc. of
the 18th national conference on Artificial Intelligence,
Edmonton, Canada.
Murillo, A. C., Guerrero, J. J., and Sag
¨
u
´
es, C. (2007). SURF
features for efficient robot localization with omnidi-
rectional images. In Proc. of the ICRA, San Diego,
USA.
Nister, D. (2003). An efcient solution to the five-point rela-
tive pose problem. In Proc. of the IEEE CVPR, Madi-
son, USA.
Scaramuzza, D. (2011). Performance evaluation of 1-point
RANSAC visual odometry. Journal of Field Robotics.
Scaramuzza, D., Fraundorfer, F., and Siegwart, R. (2009).
Real-time monocular visual odometry for on-road ve-
hicles with 1-point RANSAC. In Proc. of the ICRA,
Kobe, Japan.
Stachniss, C., Grisetti, G., Haehnel, D., and Burgard, W.
(2004). Improved Rao-Blackwellized mapping by
adaptive sampling and active loop-closure. In Proc.
of the SOAVE, Ilmenau, Germany.
Stewenius, H., Engels, C., and Nister, D. (2006). Recent de-
velopments on direct relative orientation. ISPRS Jour-
nal of Photogrammetry and Remote Sensing.
View-basedSLAMusingOmnidirectionalImages
57
