
Identification of Polytopic Models for a Linear Parameter-varying
System Performed on a Vehicle
Raluca Liacu, Dominique Beauvois and Emmanuel Godoy
Automatic Departement, Supelec Sciences of Systems (E3S), Paris, France
Keywords:
LPV Model Identification, Polytopic Model, Automotive Identification.
Abstract:
This paper deals with the parameter identification of continuous time polytopic models for a linear parameter-
varying system (LPV). A continuous-time nonlinear identification approach is presented, a mix between a
local approach and a global one is introduced in order to identify a LPV model for the lateral comportement of
a vehicle. The proposed approach is based on the prediction error method for LTI systems, which is modified
to take into account polytopic models and regularization terms. Using experimental data, different parameter-
varying structures, explaining the lateral behavior of the vehicle, were identified by the proposed method
considering the velocity as the scheduling parameter.
1 INTRODUCTION
In the last years, the field of Linear Parameter-Varying
(LPV) systems has drawn a great attention in the in-
dustrial control with a growing number of successful
applications.
Interest for such models is largely justified by the
ability they offer to design gain scheduling control as-
suming guaranteed stability for nonlinear systems.
Classical LPV models are formed using polytopic
structures constructed by a linear combination of mul-
tiple LTI models obtained at each operating point.
The operating points are chosen from the range of
the scheduling parameter. Such an experimental ap-
proach is not always feasible because of difficulties
with experiments (safety, cost, duration...). For our
application, identification of the lateral behavior of
the vehicle, this leads us to an one-shot estimation of
different LTI models based on a single record with a
varying scheduling parameter.
Two situations were considered for the LTI mod-
els: the first situation assumes that we do not know
how the model depends on the scheduling parameter.
For this assumption we have created a fully parame-
terized structure which is suitable in any situation. In
the second case, we consider that the dependence of
the model on the scheduling parameter is known and
the developed structure is based on the bicycle model.
In this paper the polytopic model is found using
the prediction error method based on a quadratic cri-
terion error in the time domain, leading to a global,
nonlinear optimization approach.
This paper presents adaptations of the standard
prediction error method to the proposed polytopic
structures.
The paper is organized as follows: in section 2 the
polytopic model and the two LPV model structures
are presented. Section 3 discusses the prediction error
method for polytopic models. In section 4 the identi-
fication background is presented based on a real data
experiment. In section 5 the results are analyzed and
the two models for the lateral behavior of a vehicle
are validated.
2 POLYTOPIC MODEL
A parameter varying system is considered. It is mod-
eled in the state space and is described by the follow-
ing equations:
dx(t)
dt
= A(p(t),ξ(p))(x(t)) + B(p(t),ξ(p))u(t)
+K(p(t), ξ(p))e(t)
y(t) = C(p(t), ξ(p))(x(t)) + D(p(t), ξ(p))u(t)
+e(t)
(1)
where x(t), y(t), u(t), e(t) represent the state variable,
the output, the input and a stochastic white noise re-
spectively. p(t) is a measurable scheduling parame-
ter with respect to time. ξ(p) is the parameter vector
which is varying with respect to p.
470
Liacu R., Beauvois D. and Godoy E..
Identification of Polytopic Models for a Linear Parameter-varying System Performed on a Vehicle.
DOI: 10.5220/0004032504700475
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 470-475
ISBN: 978-989-8565-21-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

2.1 General Structure of a Polytopic
Model
In this section the polytopic model for the considered
system is presented. For each value p
i
of p, the sys-
tem is characterized by an LTI structure (A
i
(p
i
,ξ
i
),...,
K
i
(p
i
,ξ
i
), ξ
i
= ξ(p
i
)), named the i
th
local LTI model.
A polytopic structure is formed considering a state
space representation given by:
A
c
(p,θ) =
∑
r
i=1
w
i
(p)A
i
(p
i
,ξ
i
)
B
c
(p,θ) =
∑
r
i=1
w
i
(p)B
i
(p
i
,ξ
i
)
C
c
(p,θ) =
∑
r
i=1
w
i
(p)C
i
(p
i
,ξ
i
)
D
c
(p,θ) =
∑
r
i=1
w
i
(p)D
i
(p
i
,ξ
i
)
K
c
(p,θ) =
∑
r
i=1
w
i
(p)K
i
(p
i
,ξ
i
)
(2)
with θ = [ξ
1
ξ
2
... ξ
r
] and w
i
(p) being the weighting
functions satisfying the following relations :
w
i
(p) ≥ 0,∀i,
∑
r
i=1
w
i
(p) = 1
(3)
where r is the number of operating points chosen to
represent the model and p
i
is the i-th operating point
of the scheduled signal. Figure 1 shows the weighting
functions chosen as triangular functions.
The objective of this paper is the following: us-
ing the input, output and the scheduled signal data
(u,y, p) measured from the original system, estimate
the vector θ in the polytopic form (2) so that the pre-
dicted output of the model denoted by ˆy(t) is fitted to
the output data y(t) as closely as possible.
For simplicity, this approach is presented in the
context of the determination of a second order model,
which corresponds to a characterization of a lateral
behavior of a vehicle. Two types of structures have
been developed.
2.2 Fully Parameterized Model
Structure
No knowledge about the dependence of the model
matrices owing to the scheduling parameter is as-
sumed; each local LTI model is chosen in a fully pa-
rameterized form. The weighting functions are those
given previously. The LPV matrices are constructed
as follows:
A
c
(p,θ) =
∑
r
i=1
w
i
(p)A
i
(ξ
i
)
B
c
(p,θ) =
∑
r
i=1
w
i
(p)B
i
(ξ
i
)
C
c
(p,θ) =
∑
r
i=1
w
i
(p)C
i
(ξ
i
)
D = 0
(4)
where
A
i
=
"
a
(i)
11
a
(i)
21
a
(i)
12
a
(i)
22
#
, B
i
=
h
b
(i)
1
b
(i)
2
i
T
,
C
i
=
h
c
(i)
1
c
(i)
2
i
, D
i
= 0, K
i
=
h
k
(i)
1
k
(i)
2
i
T
(5)
and
ξ
i
=
A
i
(:)
T
B
i
(:)
T
C
i
(:)
T
K
i
(:)
T
, (6)
where the notation (:) is the Matlab operator which
represents all the elements of a matrix, regarded as a
single column.
θ =
ξ
1
ξ
2
... ξ
r
(7)
For a second order model the number of parameters
to be identified is 10r.
1
0
p
i-1
p
i
p
p
i+1
w
i-1
w
i+1
w
i
Figure 1: Triangular interpolative functions.
2.3 Analytical Bicycle Model
Usually, some analytical models can be established
for a system, using physics of the phenomena. So, in
our case, for small angles of deflection and drift, ne-
glecting roll movement, the yaw angle of a vehicle is
analytically described by an approximate model: the
bicycle model (Mammar, 2006). This model (Figure
2) can be written as follows:
˙
β
¨
ψ
=
−
c
f
+c
r
mv
c
r
l
r
−c
f
l
f
mv
2
− 1
c
r
l
r
−c
f
l
f
J
z
−
c
r
l
2
r
+c
f
l
2
f
J
z
v
β
˙
ψ
+
"
c
f
mv
c
f
l
f
J
z
#
δ;
˙
ψ = [0 1]
β
˙
ψ
(8)
where β is the slip angle, ψ the yaw movement, m the
vehicle mass, v is the velocity, c
f
and c
r
the rigidi-
ties of the tires derivatives, l
f
and l
r
the distances be-
tween the front, rear wheels and the gravity center, J
z
the yaw inertia and δ the steering angle of the front
wheels. Defining x(t), y(t), u(t) as
aa
x(t) =
β
˙
ψ
, y(t) =
˙
ψ, u(t) = δ (9)
a continuous time LPV model can be written as :
dx(t)
dt
= A
a
(p,θ
(a)
)x(t) + B
a
(p,θ
(a)
)u(t)
y(t) = C
a
x(t) + D
a
u(t)
(10)
IdentificationofPolytopicModelsforaLinearParameter-varyingSystemPerformedonaVehicle
471

with p =
1
v
the scheduling parameter and θ
(a)
defined
as:
θ
(a)
=
−
c
f
+c
r
m
c
r
l
r
−c
f
l
f
J
z
c
r
l
r
−c
f
l
f
m
−
c
r
l
2
r
+c
f
l
2
f
J
z
c
f
m
c
f
l
f
J
z
i
=
h
θ
(a)
1
θ
(a)
2
θ
(a)
3
θ
(a)
4
θ
(a)
5
θ
(a)
6
i
(11)
The model matrices have the following form:
A
a
(p,θ
(a)
) =
"
θ
(a)
1
p θ
(a)
3
p
2
− 1
θ
(a)
2
θ
(a)
4
p
#
,
B
a
(p,θ
(a)
) =
"
θ
(a)
5
p
θ
(a)
6
#
, C
a
= [0 1], D
a
= 0.
(12)
h
F
T
yf
f
F
xf
f
x,u,p
y,v,q
z,w,r
T
r
r
L
F
yr
F
xr
l
f
l
r
r
F
x
u
v
V
M, J
F
yf
F
yr
F
xr
f
Figure 2: Bicycle model.
2.4 Structure based on the Bicycle
Model
The approach is to use information available from an
analytical model of the system. The structure corre-
sponds to the case where dependence, owing to the
scheduling parameter, is given to the deterministic
part of each local LTI model of the polytopic struc-
ture in accordance with the structure of the analytical
one. Using linear interpolation as shown in Figure 1
the LPV model matrices are constructed as follows:
A
c
(p,θ) =
∑
r
i=1
w
i
(p)A
a
(p
i
,θ
(a)
) C
c
(p,θ) = C
a
B
c
(p,θ) =
∑
r
i=1
w
i
(p)B
a
(p
i
,ξ
i
) D
c
(p,θ) = D
a
(13)
However, the stochastic part of each local LTI model
is kept in a fully parameterized form:
K
c
(p,θ) =
∑
r
i=1
w
i
(p)K
i
(14)
So, each local model is function of the parameter
ξ
i
=
h
θ
(a)
K
i
(:)
T
i
, (15)
and the chosen structure of the LPV system is charac-
terized by a parameter θ:
θ =
h
θ
(a)
K
1
(:)
T
... K
r
(:)
T
i
(16)
The number of parameters to be identified is 6+2r.
3 PREDICTION ERROR
METHOD FOR POLYTOPIC
MODELS
In this section, the prediction error method modified
for polytopic models (Fujimori and Ljung, 2005) is
presented. Compared to the case of LTI models, there
are two specificitys: the first is that the number of pa-
rameters to be estimated depends on the number of
chosen operating points, as we saw in the previous
section. The second one is an assumption on the dis-
cretization of the predictor and the gradient (details in
section 3-1,2,3). An inconvenience treated here is that
if we have a large number of operating points the cal-
culation of the gradient numerically is time consum-
ing, so we have adapted this procedure to our structure
(details in section 3.3).
3.1 Predictor
In order to predict the output of the system, a Kalman
predictor with the following structure is used:
d ˆx(t,θ)
dt
= A
c
(p,θ) ˆx(t, θ) + B
c
(p,θ)u(t)+
+K
c
(p,θ)(y(t) − ˆy(t, θ))
ˆy(t,θ) = C
c
(p,θ) ˆx(t, θ) + D
c
(p,θ)u(t)
(17)
We can write the following equations in order to ob-
tain the predictor:
d ˆx(t,θ)
dt
= F
c
(p,θ) ˆx(t, θ) + G
c
(p,θ)z(t)
ˆy(t,θ) = C
c
(p,θ) ˆx(t, θ) + H
c
(p,θ)z(t)
(18)
with the data set z defined as:
z(t) =
y
T
(t) u
T
(t)
(19)
and
F
c
(p,θ) =
∑
r
i=1
w
i
(p)
{
A
i
(p
i
,ξ
i
)−
−K
i
(p
i
,ξ
i
)
∑
r
j=1
w
j
(p)C
j
(p
j
,ξ
j
)
o
G
c
(p,θ) = [G
c1
G
c2
]
H
c
(p,θ) =
0
∑
r
i=1
w
i
(p)D
i
(p
i
,ξ
i
)
(20)
G
c1
=
∑
r
i=1
w
i
(p)K
i
(p
i
,ξ
i
)
G
c2
=
∑
r
i=1
w
i
(p)
{
B
i
(p
i
,ξ
i
)−
−K
i
(p
i
,ξ
i
)
∑
r
j=1
w
j
(p)D
j
(p
j
,ξ
j
)
o
(21)
3.2 Discretization
For a sufficiently short sampling period of the
data z(t), p(t) can be considered frozen during
each sampling interval, and an Euler approximation
(Heuberger, 2010) leads to the following discrete rep-
resentation of (18)
p(t) = p
(k)
= const; kT ≤ t < (k + 1)T (22)
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
472

ˆx((k + 1)T, θ) = F
d
(k, θ) ˆx(kT,θ) + G
d
(k, θ)z(kT )
ˆy(kT,θ) = C
d
(k, θ) ˆx(kT,θ) + H
d
(k, θ)z(kT )
(23)
F
d
(k, θ) = I + T F
c
(p
(k)
,θ); G
d
(k, θ) = T G
c
(p
(k)
,θ);
C
d
(k, θ) = C
c
(p
(k)
,θ); H
d
(k, θ) = H
c
(p
(k)
,θ)
(24)
3.3 Prediction Error Method
Let N be the size of the sample data Z
N
. The pa-
rameter, of the chosen structure, θ, is determined so
as to minimize the sum of square of prediction errors
J
N
(θ,Z
N
)
J
N
(θ,Z
N
) =
1
N
N
∑
t=1
1
2
e
T
(t,θ)e(t,θ) (25)
with e(t) the prediction error vector defined as
e(t,θ) = y(t) − ˆy(t,θ). (26)
The estimated parameter is obtained as:
ˆ
θ = argmin
θ
J
N
(θ,Z
N
) (27)
This optimization problem is solved using the
Levenberg-Marquardt method (Roweis, 1996)(Os-
borne, 2007) which is supplied with the gradient of
the prediction output, for sake of reduction of the cal-
culation time (Ljung, 1999). This gradient
Ψ(t,
ˆ
θ) =
∂ ˆy(t,
ˆ
θ)
∂
ˆ
θ
(28)
is obtained by the following discrete time state space
representation:
∂ ˆx(k+1,
ˆ
θ)
∂
ˆ
θ
l
= F
d
(k,
ˆ
θ)
∂ ˆx(k,
ˆ
θ)
∂
ˆ
θ
l
+
+
∂F
d
(k,
ˆ
θ)
∂
ˆ
θ
l
∂G
d
(k,
ˆ
θ)
∂
ˆ
θ
l
ˆx(k,
ˆ
θ)
z(k)
∂ ˆy(k,
ˆ
θ)
∂
ˆ
θ
l
= C
d
(k,
ˆ
θ)
∂ ˆx(k,
ˆ
θ)
∂
ˆ
θ
l
+
+
∂C
d
(k,
ˆ
θ)
∂
ˆ
θ
l
∂H
d
(k,
ˆ
θ)
∂
ˆ
θ
l
ˆx(k,
ˆ
θ)
z(k)
(29)
where θ
l
represents the l
th
component of the parame-
ter vector. First of all the derivatives of
F
d
(k, θ), G
d
(k, θ),C
d
(k, θ), H
d
(k, θ) (30)
were calculated by numerical approximations with
the following expression:
∂F
d
(k, θ)
∂θ
l
≈
F
d
(k, θ + δ
l
) − F
d
(k, θ − δ
l
)
2δ
l
(31)
where δ
l
is a small value. We have noticed that this
approach has a significant computational time, so we
optimized the calculation time using an analytical de-
termination for those derivatives.
Exploiting the form of the different matrices of the
considered two polytopic structures, straightforward
calculus leads to simple expressions for
∂F
d
(k, θ)
∂θ
l
,
∂G
d
(k, θ)
∂θ
l
,
∂C
d
(k, θ)
∂θ
l
,
∂H
d
(k, θ)
∂θ
l
(32)
these expressions let appear matrices with few non
null elements depending on T, w
i
(p
(k)
),w
i+1
(p
(k)
)
in case of the fully parameterized structure and on
T,w
i
(p
(k)
),w
i+1
(p
(k)
), p
(k)
in case of bicycle model
structure.
4 STUDY OF THE LATERAL
BEHAVIOR OF A VEHICLE
4.1 Data for Parameter Estimation
An identification of LPV model coresponding to the
lateral behavior of a vehicle is proposed. The vehicle
used to provide the data is a standard Laguna II. The
data were registered so as the experiment can be phys-
ically carried out; for sake of security, the test driver
accepted to give ”bang-bang” type movements to the
steering wheel assuming some turns in the followed
trajectory, while the vehicle speed is just decreasing
from 110 Km/h to 30 km/h. In Figure 3 data recorded
during experiments are given:
• first part gives the evolution of the control input of
the model: the steering angle of front wheels.
• second part shows the scheduling parameter, the
vehicle velocity decreasing from 110 Km/h to 30
Km/h. The velocity evolution was chosen such
that the maneuver can be carried out.
• third part represents the measured output of the
system: its yaw velocity.
0 10 20 30 40 50 60 70
-5
0
5
Steering angle (degree)
0 10 20 30 40 50 60 70
10
20
30
Velocity (m/sec)
0 10 20 30 40 50 60 70
-10
0
10
d/dt (degree/sec)
0 10 20 30 40 50 60 70
0
0.05
0.1
1/v (sec/m)
Time(s)
Figure 3: Experimental data.
As it has been mentioned previously the schedul-
ing parameter is considered to be 1/v, which is repre-
sented in the fourth part. The size of data is 50.000,
IdentificationofPolytopicModelsforaLinearParameter-varyingSystemPerformedonaVehicle
473

the sampling time is T = 0.001 sec. So, the assump-
tion of a constant value of the scheduling parameter is
clearly validated for this experiment.
4.2 Polytopic Structures Identifications
The two proposed structures are considered using the
operating points corresponding to 30 Km/h, 50 Km/h,
110 Km/h. Optimization using Levenberg-Marquardt
method needs an initialization of the parameter vector
to identify; for both structures this initial vector was
created from nominal values of c
r
, c
f
, l
r
, l
f
, m, J
z
given by the vehicle constructor.
Dealing with the fully parameterized polytopic
structure, the problem consists in determining three
parameter vectors ξ
i
for the local LTI fully parame-
terized models, corresponding to the operating points,
from data acquired during a global experience. As
suggested in (McKelvey and Maureen, 1995), for this
structure, it could be interesting to determine bal-
anced realizations presenting a low sensitivity to pa-
rameters. A balanced realization is determinate by
balancing the observability and controllability gram-
mians of the obtained state space model. Thus for this
case, the prediction error method was slightly modi-
fied introducing a regularization term and the follow-
ing algorithm has been used:
1. Obtain an initial state-space estimate θ
0
2. Convert the model to a balanced realization and let
the corresponding parameter be θ
0
b
3. Let I = 1
4. Solve the minimization problem using Levenberg-
Marquardt method:
ˆ
θ
I
N,δ
= argmin
θ
J
N,δ
(θ)
J
N,δ
(θ) = J
N
(θ,Z
N
) +
δ
2
kθ − θ
I−1
b
k
2
5. Convert the obtained estimate to correspond to a
balanced realization
ˆ
θ
I
b
.
if J
N,δ
(
ˆ
θ
I−1
b
) − J
N,δ
(
ˆ
θ
I
b
) < e → fin;
else I = I + 1 go to 4, where e is a a priori given
constant.
5 RESULTS ANALYSIS
5.1 Identification Results
For each structure the identification algorithm has
converged such that the estimated parameters lead to:
• insignificant prediction error, for the output
˙
ψ dur-
ing the considered experience (with slow variation
of the velocity from 110 Km/h to 30 Km/h) as
shown in Figure 4.
• reasonable errors simulating the experience with
the obtained models using only the input data
u
k
, p
k
.
Table I shows the Root Mean Square for the predict-
ing and simulating errors. Better performances are
obtained using the polytopic bicycle model structure,
clearly because of introducing some a priori knowl-
edge of the dependence on the scheduling parameter
at the operating points.
Table 1: Root Mean Square.
Model SMB SFP
RMS(dgr/s) - predicted err. 0.0270 0.0277
RMS(dgr/s) - simulated err. 1.5851 3.4585
0 0.5 1 1.5 2 2.5 3
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Erreur de prédiction - sfp
Temps(s)
Erreur de prédiction(degree/s)
0 0.5 1 1.5 2 2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Erreur de prédiction - smb
Temps(s)
Erreur de prédiction(degree/s)
Figure 4: Comparison between the real vehicle output and
the predicted outputs.
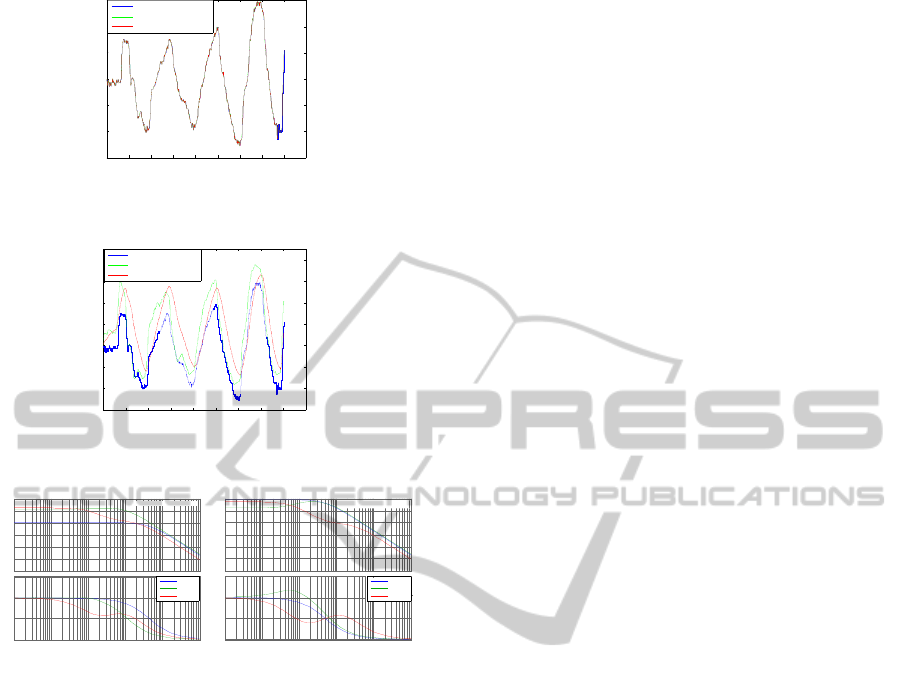
5.2 Validation
A new set of real data was used. We observe the re-
sults in time domain and analyze the model in the fre-
quency domain.
5.2.1 Time Domain Analysis
The predictor was simulated with the new data set. As
it can be seen in Figure 5 the outputs of the both struc-
tures reproduce well the system output. The nota-
tions Sfp correspond to the fully parameterized struc-
ture and Smb to bicycle model structure. In Figure 6,
the model was simulated with the new data set. As
we were looking for a predictor to minimize the pre-
diction error, it is normal that the error between the
predicted output of the model and the system output
being more important. We can observe better perfor-
mances in the case of the bicycle model structure, as
we have more a priori information about the system.
The validation also leads to insignificant prediction
error, for any vehicle velocity and reasonable simula-
tion error.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
474
Time(s)
0 5 10 15 20 25 30 35 40 45
-6
-4
-2
0
2
4
6
d
(psi)/dt(degre
e
/sec)
Validation for predicted outputs
d(psi)/dt real
d(psi)/dt smb estimated
d(psi)/dt sfp estimated
Figure 5: Comparison between the real vehicle output and
the predicted output with a second set of data.
0 5 10 15 20 25 30 35 40 45
-6
-4
-2
0
2
4
6
8
Time(s)
d(psi)/dt(degr
e
e/sec)
Validation for simulated outputs
d(psi)/dt real
d(psi)/dt smb simulated
d(psi)/dt sfp simulated
Figure 6: Comparison between the real vehicle output and
the outputs simulated with a second set of data.
-40
-30
-20
-10
0
10
20
Magnitude (dB)
10
-2
10
-1
10
0
10
1
10
2
10
3
-90
-45
0
45
Phase (deg)
Frequency (rad/s)
sys anal
Smb
Sfp
Bode diagram for v = 100 Km/h
-40
-30
-20
-10
0
10
20
Magnitude (dB)
10
-2
10
-1
10
0
10
1
10
2
10
3
-90
-45
0
45
Phase (deg)
sys anal
Smb
Sfp
Frequency (rad/s)
Bode diagram for v= 60 Km/h
Figure 7: Bode diagrams for two arbitrary velocities.
5.2.2 Frequency Domain Analysis
Analysis of the analytical bicycle model, based on
the physical parameters given by the vehicle con-
structor, can be done for the chosen operating points.
The model is a second order with a zero that re-
duces the effect of the two poles, so it has the fre-
quency response similar to that of a 1
st
order system.
Bode diagrams (Figure 7) illustrate the influence of
the scheduling parameter on the characteristics of the
model, in the case of analytical model, high frequency
behavior is the same whatever the velocity is (as ex-
pected from the fact that C
a
B
a
is independent of the
velocity), modifications of the velocity induce mod-
ifications of the static gain, and of the bandwidth in
accordance. The frequency response of the two struc-
tures was compared with the Bode diagram of the an-
alytical model, it can be observed that the identified
polytopic bicycle model structure tracks well the an-
alytical bicycle model dynamics at high frequencies,
because of the coherence of the form of the CB prod-
ucts of the two structures; which is not the case for
the fully parameterized polytopic model.
6 CONCLUSIONS
In this paper a LPV lateral behavior of a vehicle was
represented by a polytopic model. It was considered
that the system dependence on the scheduling param-
eter is known and a polytopic bicycle model struc-
ture was thus developed. The possibility of a model
whose parameter dependence is not known was also
taken into account, and a fully parameterized struc-
ture was created. Both models have been identified
from real data set recorded during an experiment with
a Laguna II vehicle. The pertinence of both identified
structures was carried out with a validation data set.
Better results were obtained with the polytopic bicy-
cle model structure, knowing that a priori information
of the system was available.
REFERENCES
Fujimori, A. and Ljung, L. (2005). Parameter estimation of
polytopic models for a linear parameter varying air-
craft system. submitted to Transactions of Japan So-
ciety for Aeronautical and Space Sciences (JSASS).
Heuberger, P. S. C. (2010). On the discretization of lpv
state-space representations. Transformation, 4(10):1–
29.
Ljung, L. (1999). System Identification: Theory for the User
(2nd Edition). Prentice Hall.
Mammar, S. (2006). Memoire presente en vue d’obtenir
l’habilitation a diriger les recherches. Universite
d’Evry-Val d’Essone.
McKelvey, T. and Maureen, T. (1995). Identification of
State-Space Models from Time and Frequency Data.
Osborne, M. R. (2007). Separable least squares, variable
projection, and the Gauss-Newton algorithm. Elec-
tronic Transactions on Numerical Analysis, 28:1–15.
Roweis, S. T. (1996). Levenberg-marquardt optimization.
IdentificationofPolytopicModelsforaLinearParameter-varyingSystemPerformedonaVehicle
475
