
Motorbike Modeling and Control
Jo
˜
ao Sequeira and Marco di Vittori
Instituto Superior Tecnico, Technical University of Lisbon, Lisbon, Portugal
Keywords:
Kinematics, Dynamics, PID Control, MPC Control, Nonlinear Control.
Abstract:
This paper surveys the kinematics of bikes and details the construction of a dynamics model for a motorbike
using the Lagrangian approach. Using data from a typical sports motorbike, a dynamics model is obtained by
symbolic computation. This model, of high algebraic complexity, is then wrapped as a function and used for
control purposes. Control strategies based on PID, MPC, and nonlinear control are discussed and simulation
results for each of them are presented.
1 INTRODUCTION
The study of bicycle modeling and control dates back
to the last years of 19th century, namely through the
work of F.J. Whipple (see for instance (Limebeer and
Sharp, 2006)). In recent times there has been a re-
newed interest in this type of vehicles from an aca-
demic viewpoint and extreme riding, as in racing,is
still challenging, namely in what concerns the devel-
opment of control strategies for autonomous or quasi-
autonomous motion.
Related work in literature is extensive. Surveys
on a wide range of bicycle models are presented in
(Astr
¨
om et al., 2005), (Limebeer and Sharp, 2006). A
linearized model for an uncontrolled bicycle was pre-
sented in (Schwab et al., 2004) with multiple simpli-
fications, namely the bike is formed by rigid bodies,
the wheels have no width, and the rider position is
constant.
Realistic motorcycle dynamics have an alge-
braically complexity higher than those of simple by-
cicles. Among the relevant work, the geometry of
the contact between tyres and the road, the tyre shear
force and moment descriptions, as functions of load,
slip and camber, the tyre relaxation properties, rear
suspension, rider behavior, and steering control have
been addressed in (Sharp et al., 2004). Only PID
based strategies were considered for speed and steer-
ing control, though with adjustable gains.
Some aspects related to the steering angle con-
trol in human driving are addressed in (Popov et al.,
2010). The stability dependency on control param-
eters is analyzed from the human automatisms pro-
cesses when riding a motorbike, including a precog-
nitive component related to the rider’s experience, a
compensatory component as the closed loop control,
and a pursuit component as a feedforward term to
handle throttle and braking. Optimal, Model Pre-
dictive (MPC), and PID based steering control are
claimed to match the three stage control used by hu-
man riders.
This paper surveys kinematics models for byci-
cles and their extensions to commercial motorbikes in
section 2. The dynamics model is derived in section
3, using the classic constrained Lagrangian method.
This model is then used in section 4 to test trajectory
tracking using PID, MPC, and nonlinear laws. Simu-
lation results are compared with a reference trajectory
obtained from telemetry data from a real motorbike in
a racetrack. Section 5 discusses the results obtained
with the models based uniquely on the kinematics and
those obtained using dynamics models.
2 KINEMATICS
Using the simplified geometry in figure 1 the kine-
matics equations for a simple motorbike model are
simply, (Limebeer and Sharp, 2006),
˙x = v cos(ψ) (1)
˙y = v sin(ψ) (1a)
˙
ψ =
vtan(δ)
wcos(ϕ)
(1b)
where w is the wheelbase, assumed constant.
The rake angle, γ (see figure 2) can be easily in-
cluded and (1b) becomes,
249
Sequeira J. and di Vittori M..
Motorbike Modeling and Control.
DOI: 10.5220/0004034302490254
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 249-254
ISBN: 978-989-8565-22-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
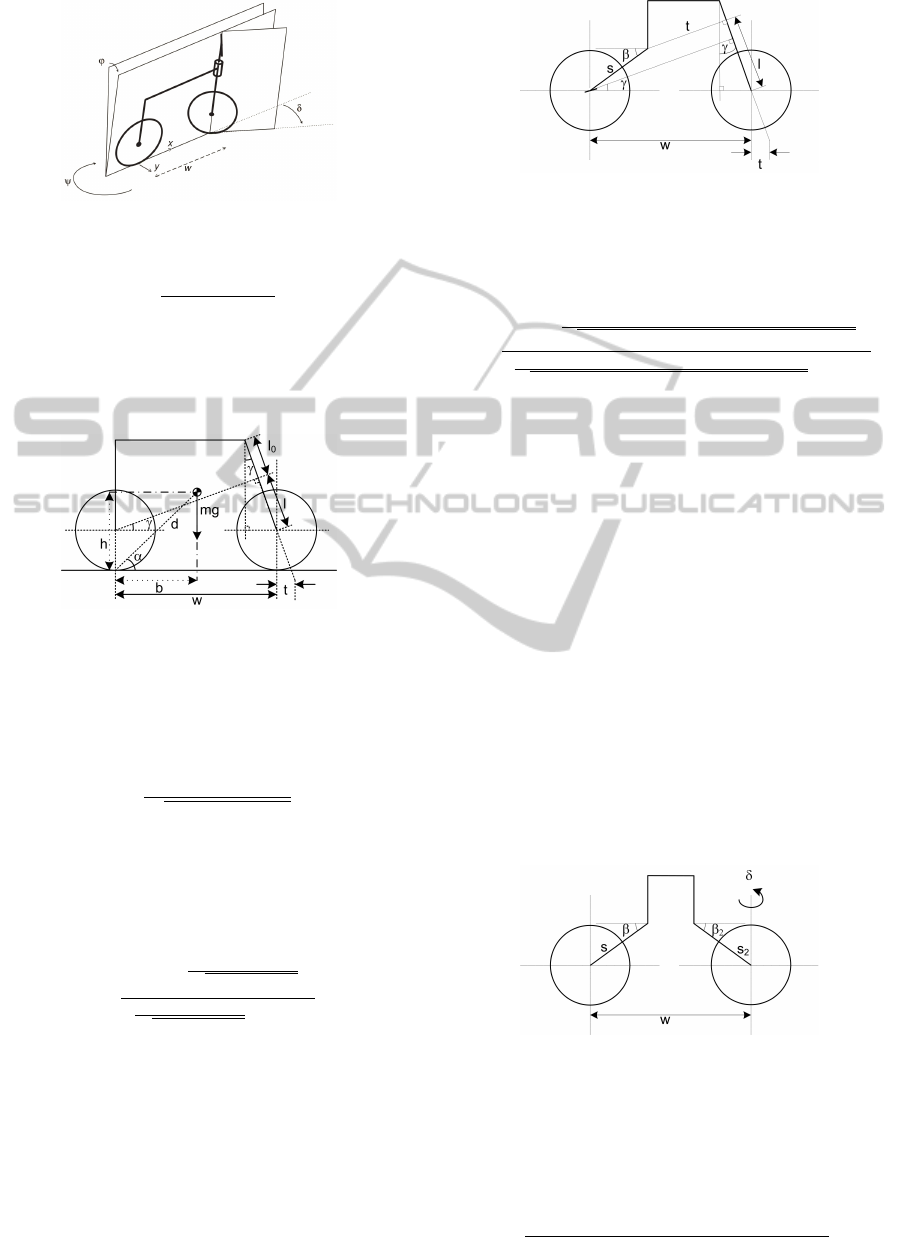
Figure 1: Simplified bike geometry (adapted from (Lime-
beer and Sharp, 2006)).
˙
ψ =
vtan(δcos(γ))
wcos(ϕ)
(2)
A typical rake in resting conditions value for a com-
mercially available motorbike is γ = 23.5
◦
. This
model assumes no front or rear suspensions which in
reality induce variations in w.
Figure 2: Front fork, rake angle, and trail distance.
The front fork length is given by l = w sin(γ) (see
figure 2). Assuming that the chassis is rigid w cos(γ)
must be constant
It is straightforward to obtain the following rela-
tion,
w =
l
q
w
2
0
cos
2
(γ
0
) + l
2
(3)
where w
0
and γ
0
represent the wheelbase distance and
rake angle in resting conditions. Substituting in (2)
the kinematics model including the front fork length l
is,
˙
ψ =
v tan
δ
|w
0
cos(γ
0
)|
√
w
2
0
cos
2
(γ
0
)+l
2
l
2
√
w
2
0
cos
2
(γ
0
)+l
2
cos(ϕ)
(4)
A typical value for the front fork trail is around 119.0
mm.
In most of the current motorbikes the rear wheel is
connected to the chassis through a moving swingarm.
The typical geometry used by manufacturers intro-
duces a new variable, β, representing the angle be-
tween the swingarm and the horizontal x axis (figure
3). The length of the swingarm is denoted by s.
The corresponding model can be obtained by replac-
Figure 3: Swingarm connecting the back wheel to the bike
frame.
ing the variables w
0
and γ
0
in (4) by w
0
−(s −cos(β−
γ
0
)) and l + sin(β −γ
0
) respectively.
˙
ψ =
v tan
δ
|(w
0
−(s−cos(β−γ
0
)))cos(γ
0
)|
√
(w
0
−(s−cos(β−γ
0
)))
2
cos
2
(γ
0
)+(l+sin(β−γ
0
))
2
(l+sin(β−γ
0
))
2
√
(w
0
−(s−cos(β−γ
0
)))
2
cos
2
(γ
0
)+(l+sin(β−γ
0
))
2
cos(ϕ)
(5)
Model (5) accounts for most of the geometric as-
pects in current motorbike designs. Even though the
instantiation done with typical values for some of the
parameters, the model shows the complex structure of
a motorbike kinematics.
From (1) and (2), if w increases then
˙
ψ decreases.
This may be a desirable feature in conditions where
ψ is subject to disturbances. For example, under hard
braking conditions any disturbances in δ and v will be
affected by the gain 1/w. If this gain decreases then
also will the effects of these disturbances in ψ.
A similar reasoning can be made when the front
fork is considered and this suggests an alternative
kinematics, namely using and additional swingarm at
the front of the motorbike, instead of the common
front fork. In terms of the model previously devel-
oped there is no γ angle and an additional variable
β
2
is introduced to represent the angle of the front
swingarm.
Figure 4: Double swingarm geometry.
As before, using typical values from commer-
cially available motorbikes yields or the rotation (w
now depends on both the front and rear swingarm po-
sition),
w = s cos(β) + s
2
cos(β
2
) + 231
˙
ψ =
v δ
578.5(cos(β) + cos(β
2
) + 231)cos(ϕ)
(6)
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
250

where β and β
2
values will be in the range
[0.4
◦
,13.4
◦
].
Double swingarm kinematics has been seldom
used in production bikes (the reader can check the
Yamaha GTS 1000 and Bimota Tesi). Even in rac-
ing applications, which in a sense tend to use more
extreme designs, there is a single known case, the Elf
500cc motorbike, which raced during the 80’s decade.
This type of kinematics is sometimes referred as be-
ing extremely stable under hard braking conditions.
Combinations of the fork and swingarm in the
front geometry are currently being used (see for in-
stance the telelever and duolever systems used by
BMW). As aforementioned, the idea is to increase the
wheelbase under braking to improve the rideability.
3 DYNAMICS
Computing the dynamics of a constrained multibody
vehicle, as a motorbike, is relatively straightforward
assuming that the motorbike is composed by multiple
rigid bodies with known geometry and mass distribu-
tion properties. However, it is seldom the case that
perfect information is available. An extreme example
is the sloshing effect caused by the fuel moving freely
in the tank (in some bikes the fuel can account for 6%
of the total mass). Therefore, simplified models of
mass distribution are often assumed.
The strategy followed in this paper is to compute a
symbolic model, using the Lagrangian technique. The
resulting model is then wrapped as a Matlab func-
tion that can be used as a blackbox model for ex-
perimenting purposes. This model accounts for the
main kinetic energy sources in a motorbike, namely,
the engine, and wheels and bike main body under
leaning and turning (the terms due to the motion of
the swingarm and front fork are not considered). Po-
tential energy is also not considered in this model as
the variations involved when the bike leans or moves
along height variations tend to be small and do not
disturb the structure of the model.
The total kinetic energy including terms due to
leaning and turning, linear velocity, front and rear
wheels, and engine is thus given by,
K =
m(
˙
ϕh +
˙
ψb)
2
2
+
mR
2
r
˙
θ
2
m
g
2
r
2
+ (7)
+
m
f
R
2
r
˙
θ
2
m
g
2
r
4cos
2
(δcos(γ))
+
m
r
r
2
r
˙
θ
2
m
g
2
r
4
+
m
m
r
2
m
˙
θ
2
m
4
where b,h are the mass center coordinates (see Fig-
ure 2, note that the total mass of the frame, suspen-
sions, and non-rotating parts of the engine, m, are
concentrated at a single point). The front and back
wheels have masses m
f
and m
r
, respectively, and
m
m
is the engine’s rotating mass and inertias mod-
eled as thin disks. The wheel radius are r
f
and r
r
,
respectively for the front and back wheels, whereas
r
m
is the radius of the engine’s rotating mass. The
angular velocity of the engine is
˙
θ
m
leading to an-
gular velocities for the forward and back wheels of
˙
θ
f
=
˙
θ
m
g
r
R
r
cos(δ)R
f
and
˙
θ
r
= g
r
˙
θ
m
, respectively. The ra-
tio between the engine and rear wheel angular ve-
locities is denoted g
r
and R
r
is the rear wheel effec-
tive radius which accounts for the leaning of the bike
as R
r
= r
t
cos(ϕ) + r
w
p
1 −(r
r
/r
w
sin(ϕ))
2
and r
w
is
the wheel rhym radius, r
t
is the tyre tube radius and
r
r
= r
w
+ r
t
.
Table 1 lists the main physical parameters and val-
ues used in the model.
Table 1: Dynamics parameters (after a commercial motor-
bike).
α = 0.698rad d = 0.85m m = 180Kg
m
f
= 3.3Kg m
r
= 4.5Kg m
m
= 2.5Kg
r
r
= 0.3149m r
m
= 0.1m g
r
= 0.192
r
w
= 0.2277m λ
0
= 23.5
◦
The theory for constrained Lagrangian systems is
well understood when the constraints are holonomic
or semi-holonomic. See for instance (Chess
´
e and
Bessonet, 2001; Campion et al., 1996; McClamroch
and Wang, 1988) for structures with holonomic con-
straints and (Flannery, 2005) for nonholonomic ones.
The ideal 2-wheel motorbike has two classes of
constraints, (i) the contact with the ground which
constrains the vertical movement, and (ii) the car-
like non-holonomic constraint, v =
˙
ψr
1
(which is also
commonly written as ˙x sin ψ − ˙y cos ψ = 0), that in-
hibits side-slipping (r
1
represents the curve radius)
and the rolling constraint v = cos(ψ) ˙x + sin(ψ) ˙y, that
inhibits forward-skidding. In a real motorbike the va-
riety of situations rends difficult an accurate identi-
fication of the constraints. For example, the geome-
try of the contact between the tyres and the ground
imposes that there is indeed a small amount of slide-
slippage and hence the non side-slipping constraint is
only valid under unrealistic conditions.
A common strategy when identifying constrained
dynamics is to rely on a priori knowledge on the
physical effects affecting the robots (see for instance
(Astr
¨
om et al., 2005; Yi et al., 2009)). The con-
straining torques are thus simplified and are consid-
ered the direct consequence of the reaction forces ap-
plied on the center of mass and formed by the gravi-
tational and centrifugal forces that constrain the mo-
MotorbikeModelingandControl
251
torbike at the contact points between the wheels and
the ground. These forces are calculated as N = mg
and T = m R
r
g
r
˙
θ
˙
ψ, respectively as the vertical force
due to gravity depending on the total mass, m, and
gravity g and the centrifugal force due to
˙
ψ turning
speed. These forces are related to ϕ as the torque
Γ
ϕext
= Nh sin(ϕ) −T h cos(ϕ) so the total model has
the following structure.
M
¨
ϕ
¨
θ
+V =
Γ
ϕ
Γ
θ
+
Nhsin ϕ −T hcos ϕ
0
(8)
with M and V as determined by the free Lagrangian
computed from (7), and Γ
ϕ
, Γ
θ
being functions re-
spectively of the steering angle δ and the force F
f
ex-
herted on the footpegs by the driver.
4 CONTROL
The dynamics model (8) was first controlled by a PID
controller. Figure 5 shows the results obtained for
a section of the Montmelo racetrack near Barcelona,
Spain. This section of the racetrack includes fast
and slow portions where different control parameters
are required. Thus, a supervisor controller changes
the PID gains at appropriate times, when the bike
switches between the different sections of the track.
Figure 5: PID based control.
A natural alternative approach, widely used in the
literature (see for instance (Rau and Schr
¨
oder, 2002))
is the Model Predictive Control (MPC). Roughly, the
MPC computes the open loop controls during a fi-
nite horizon that minimize at each instant k a cost
J(k) =
∑
N
y
i=1
w
i
(r(k + i) −y(k + i))
2
+ w
u
∑
N
u
i=1
u(k +
i)
2
, where r is a reference, y the output and u the con-
trols of the system, and uses the first controls in the
optimal sequence. At subsequent steps the procedure
is repeated, thus closing the control loop.
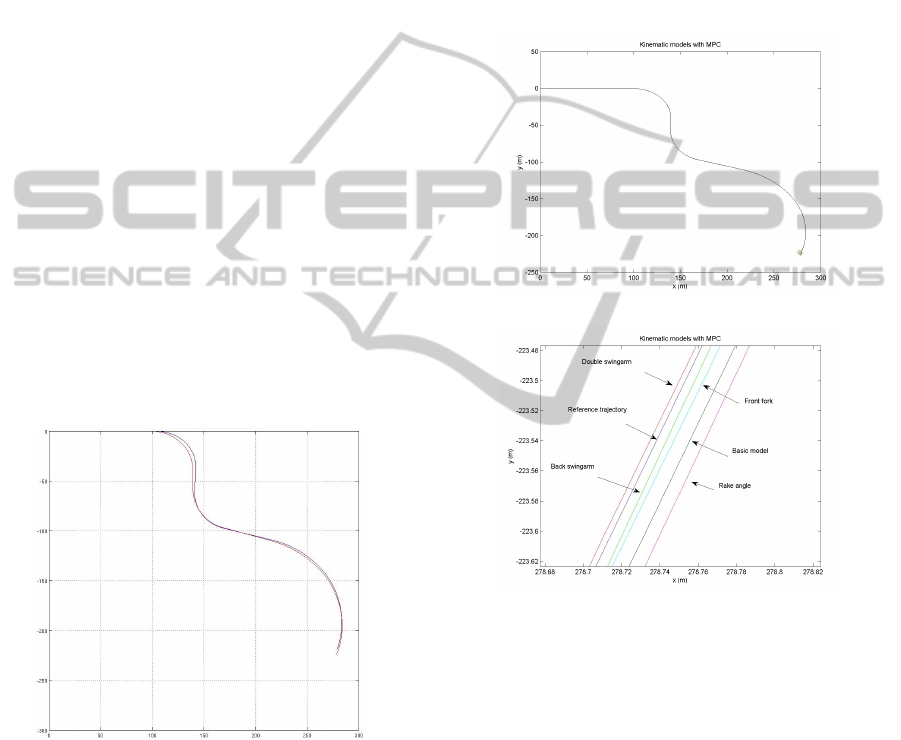
Figure 6 shows the MPC applied to the kine-
matic models described in previous section, (1) to
(6). A discrete range of controls is used, namely
δ ∈
{
−1,−0.5,−0.2, 0,0.2, 0.5,1
}
. Linear velocity is
assumed constant, v = 1, and wheelbase w
0
= 1.3m.
Control horizon N = 3 N
y
= N
u
= 3 and control
weights are w
u
= 10 and w
i
= 2 ×10
−4
for the sim-
pler models and w
y
= 10
−8
for model (5). Only the
first control of the sequence computed at each instant
is used, that is, a new control is computed at each time
step.
(a) Complete trajectory
(b) Trajectory detail
Figure 6: Kinematic models with MPC.
Even though the trajectories are shown for fixed
values of the parameters λ
0
,l,β,β
2
, the curves sug-
gest that the double swingarm and front fork models
may be preferable in a real racing scenario, where the
small differences shown may be very relevant.
Figure 7 illustrates the MPC results when the full
dynamics model is used with w
u
= 10 and w
i
= 10
−4
.
PID control was used to drive the leaning to 0 and an
engine torque bounded at 0.8 Nm.
The nonlinear law used to control steering is com-
mon in Robotics (and known to stabilize linearized
unicycle models) and is of the form,
δ = −K
1
vl + K
2
|v|(ψ
re f
−ψ) (9)
where l is the signed distance defined by the projec-
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
252

(a) Trajectory
(b) Steering angle
Figure 7: Dynamics model and MPC.
tion of the position of the motorbike onto the refer-
ence path, v is the linear velocity, ψ, ψ
re f
are the ori-
entation of the bike and the corresponding reference,
and K
1
, K
2
tuning constants. Leaning was controlled
using a PID.
Figure 8 illustrates the performance of the motor-
bike when the steering is controlled by (9) (see ap-
pendix 5 for a stability proof).
The jerk in both controls is significantly smaller
than with MPC control and the leaning angle error is
also smaller.
5 CONCLUSIONS
Starting from basic models for bicycles, the paper
introduces a number of kinematics features that are
common in motorbikes. These features are shown
to influence the kinematic models significantly and
hence justify the use of complex models to describe
bikes in the context of real applications. MPC control
was shown to yield small differences among the mod-
els that nonetheless may be relevant in extreme riding
conditions such as racing.
A dynamics model, accounting for the bike and
engine motion, is presented and controlled using PID,
(a) Trajectory
(b) Steering angle
Figure 8: Nonlinear control law with K
1
= 5, K
2
= 10.
MPC, and a nonlinear law. As with the kinematic
models, the three techniques show very small differ-
ences in the trajectory following error, though pre-
senting very different computational requirements.
Even though the simplifying assumptions taken,
i.e., on point masses, inertias, rigidity of the different
bodies, driver model reduced to the footpeg force in-
put, the algebraic complexity of the free Lagrangian
is high. This justifies the use of a further simplifying
strategy, that is, the inclusion of constraint forces di-
rectly in the model. The different control strategies
provide interesting results, with the nonlinear law ex-
hibiting a far more reasonable behavior from a practi-
cal application perspective, with less jerk, and suggest
that the whole model can be used to further proceed
the research on the full racing problem. Future work
also involves the testing of a supervisory control layer
to optimize the selection of parameters for the leaning
and velocity loops.
ACKNOWLEDGEMENTS
This work was partially supported by FCT project
PEst-OE/EEI/LA0009/2011.
MotorbikeModelingandControl
253

REFERENCES
Abdallah, C., Dawson, D., Dorato, P., and Jamshidi, M.
(1990). Survey of Robust Control for Rigid Robots.
In Procs. American Control Conf.
Anderson, R. (1989). Passive Computed Torque Algorithms
for Robots. In Procs. 28th Conf. on Decision and Con-
trol.
Astr
¨
om, K., Klein, R., and Lennartsson, A. (2005). Bicycle
Dynamics and Control. IEEE Control Systems Maga-
zine.
Campion, G., Bastin, G., and D’Andrea-Novel, B. (1996).
Structural Properties and Classification of Kinematic
and Dynamic Models of Wheeled Mobile Robots.
IEEE Trans. on Robotics and Automation, 12(1).
Chess
´
e, S. and Bessonet, G. (2001). Optimal dynam-
ics of constrained multibody systems. Application to
bipedal walking synthesis. In Procs of the IEEE Int.
Conf. on Robotics and Automation. Seoul, Korea, May
21-26.
Flannery, M. (2005). The enigma of nonholonomic con-
straints. American Journal of Physics, 73(3):265–272.
Limebeer, D. and Sharp, R. (2006). Bicycles, Motorcycles,
and Models. IEEE Control System Magazine.
McClamroch, N. and Wang, D. (1988). Feedback Stabi-
lization and Tracking of Constrained Robots. IEEE
Transactions on Automatic Control, 33(5):419–426.
Ortega, R., Lor
´
ıa, A., Nicklasson, P., and Sira-Ram
´
ırez, H.
(1998). Passivity-based Control of Euler-Lagrange
Systems. Springer.
Ortega, R. and Spong, M. (1988). Adaptive motion con-
trol of rigid robots: A tutorial. In Procs. IEEE Conf.
Decision and Control.
Popov, A., Rowell, S., and Meijaard, J. (2010). A review
on motorcycle and rider modeling for steering control.
Vehicle System Dynamics, 48(6):775–792.
Rau, M. and Schr
¨
oder, D. (2002). Model Predictive Control
with Nonlinear State Space Models. In Procs. of the
American Control Conference (AMC 2002).
Schwab, A., Meijard, J., and Papadopoulus, J. (2004).
Benchmark results on the linearized equations of mo-
tion of an uncontrolled bicycle. In Proc. 2nd Asian
Conf. Multibody Dynamics.
Sharp, R., Evangelou, S., and Limebeer, D. (2004). Ad-
vances in the Modeling of Motorcycle Dynamics.
Multibody System Dynamics, (12):251–283.
Yi, J., Zhang, Y., and Song, D. (2009). Autonomous Motor-
cycles for Agile Maneuvers, Part I: Dynamics Model-
ing. In Procs. Joint 48th IEEE Conf. on Decision and
Control and 28th Chinese Control Conf.
Yu, H. and Antsaklis, P. (2009). Passivity-Based Distributed
Control of Networked Euler-Lagrange Systems With
Nonholonomic Constraints. Technical report. Tech-
nical Report of the ISIS Group at the Univ. of Notre
Dame, ISIS-09-003.
APPENDIX
Nonlinear Controller Stability
The dynamics (8) can be written in more general
terms as,
M(ϕ,θ)
¨
ϕ
¨
θ
+V (ϕ,
˙
ϕ,θ,
˙
θ) = (10)
=
2.148F
f
T
m
+
Nhsin(ϕ) −T h cos(ϕ)
0
˙
ψ = 0.046 tan(δcos(γ))
˙
θ/cos(ϕ) (10b)
Unconstrained Lagrangian systems can be shown
to have the passivity property, (Ortega and Spong,
1988) even when subject to external forces/torques,
such as the case of a motorbike, (Yu and Antsaklis,
2009). Also, a feedback control of a passive system
with a passive controller yields a stable system (see
(Abdallah et al., 1990)) and even in the case of con-
tact forces and uncertainties in M a PD-like structure
was shown to be able to stabilize the system (see (An-
derson, 1989)).
Therefore, it remains to be shown here that (i) de-
coupling the control for F
f
,T
m
,δ does not disturb the
passivity property, and (ii) the nonlinear law (9) also
drives the tracking error to zero.
The passivity property is closed under the addi-
tion operation on controls. In what concerns con-
trol inputs F
f
,T
m
, decoupling the control law means
that each control input is driven by an independent
controller. In the experiments, T
m
was chosen as a
pulse of constant height 0.1 Nm, going to zero as
˙
θ
m
> 0.8 rad/s and hence it verifies the passivity prop-
erty. As for F
f
, it was generated after a PID, meaning
that it also verifies the passivity property (see (Ortega
et al., 1998)). It is enough to described the control
as [Γ
ϕ
,Γ
θ
] = [Γ
ϕ
,0] + [0, Γ
θ
] to verify that the decou-
pling of the controls preserves the passivity property
of the overall system.
As for the control input δ, substituting the control
law (9) in (10b) yields an equation of the form,
˙e
ψ
= −tan
(−K
1
vl + K
2
|v|e
ψ
)cos(γ)
K (11)
where the orientation error is e
ψ
= ψ
re f
−ψ, and K =
0.046
˙
θ/cos(ϕ) is nonzero for the relevant ranges of
the argument, i.e., v ∈(0,+∞) and ϕ ∈ (−pi/2, π/2).
The fixed point of (11) is thus obtained either
when v = 0, or when l = 0 and ψ = ψ
re f
, and hence
the nonlinear control law is able to make the motor-
bike track the reference trajectory.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
254
