
Adaptive Data Update Management in Sensor Networks
C. M. Krishna
ECE Department, University of Massachusetts at Amherst, Amherst, U.S.A.
Keywords:
Sensor Networks, Energy-aware Computing, Energy Harvesting, Accuracy Balancing.
Abstract:
Transmitting messages is by far the most energy-intensive thing that most sensors do. We consider the problem
of a sensor which regularly senses some parameter in its operating environment. Based on the value it knows
to have been estimated at the base station (or other central information collation station) for that parameter,
the actual sensed value, its remaining energy levels, and other quantities such as the time-to-go in the mission
(if limited) or the anticipated energy inflow (if energy harvesting is used), it decides whether that sensed value
is worth transmitting. We present heuristics to make this decision and evaluate their performance.
1 INTRODUCTION
We address the following problem. We have a sin-
gle sensor, which samples the value of some environ-
mental parameter at periodic intervals. It then has to
decide whether or not it is worth the expense of trans-
mitting this information. We explore heuristics for
doing so in two cases: Case 1: There is a fixed over-
all energy store, and Case 2: The network harvests
energy from the operating environment.
The problem arises from the fact that broadcasting
is by far the most energy-expensive thing that most
sensor nodes can do. By comparison with the energy
it takes to send a message, the act of sensing, i.e., of
obtaining the information to be transmitted, takes al-
most negligible energy in most instances, especially
since the node can sleep between sampling epochs.
The decision as to whether or not to transmit is
based on the following considerations: (a) The value
of the sensed parameter, (b) the value that would be
estimated by the user if this parameter were to be sup-
pressed at the sensor rather than being reported to the
user, (c) the current energy state at the sensor, and (d)
the residual mission lifetime (if this is limited). If en-
ergy reserves are replenished by harvesting from the
operating environment, an additional factor is the an-
ticipated near-term inflows of energy from such har-
vesting.
Our contributions in this paper are to develop
lightweight adaptive algorithms to decide whether
or not to transmit for the two cases. Our adaptive
thresholding algorithms do not require any informa-
tion about the operating environment. Rather than
keep the sensor value within some specified bounds,
their aim is to provide some means to do “accuracy
balancing” over time, i.e., keep the minimum accu-
racy of the information at the base station at roughly
the same level over the period of operation. Such an
approach would be useful when the priority is to keep
the network functioning over a given period under the
assumption that the deleterious impact of inaccuracy
is the same at any point in time. It would be useful
when the cost of inaccuracy is a roughly linear func-
tion of the inaccuracy with which the sensor informa-
tion is known.
Our MDT-based algorithm imposes a greater com-
putational load, but that problem can be circumvented
by carrying out most of these calculations offline and
storing the appropriate action in a lookup table.
2 RELATED PRIOR WORK
2.1 Adaptive Data Aggregation and
Reporting
A number of authors have reported work on adaptive
data aggregation and reporting in sensor networks.
We list here a representative sample of them.
One of the first contributions in this area was
the approach of Goel and Imielinski (2001). They
borrowed from the compression techniques used for
MPEG video. The field of data generated from spa-
tially distributed sensors can be visualized as inten-
sity values in an image. Existing MPEG spatial and
temporal compression techniques can then be used to
exploit the spatio-temporal correlation that exists be-
tween neigbouring sensor values.
Deshpande, et al. (2004) follow the idea of learn-
476
M. Krishna C..
Adaptive Data Update Management in Sensor Networks.
DOI: 10.5220/0004034404760481
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 476-481
ISBN: 978-989-8565-21-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

ing the spatial and temporal correlations of sensor
data. Santini and Romer (2006) use a Least-Mean-
Square (LMS) adaptive algorithm for making predic-
tions given a data stream. Han, et al. (2007) consider
sensor transmissions that are either source-triggered
or consumer-triggered (the consumers are the queries
that come into the system, asking for parameter infor-
mation). In all these cases, the sensor transmission is
suppressed if it would not add sufficient value.
Ahmadi and Abdelzaher (2009) take reliability
into consideration. In particular, they take into ac-
count the fact that wireless networks are often noisy
and drop packets.
2.2 Energy Harvesting
Energy harvesting has been the focus of increasing
interest. Surveys of energy harvesting techniques can
be found in Chalasani and Conrad (2008) and Park,
et al. (2007). Related power management techniques
are studied in Kansal, et al. (2007) and Sharma, et
al. (2010). These include migrating tasks to nodes
depending on their energy levels. Task scheduling in
energy harvesting real-time systems is considered in
Moser, et al. (2007); their algorithms take into ac-
count both the prevailing energy and time constraints,
rather than simply the task timing constraints.
3 MODELS
3.1 Environmental Model
The sensed environment has a behaviour as projected
by the user. For example, if we have a sensor mea-
suring outdoor temperature, there could be a formula
that uses the current time-of-day and the last few re-
ported observations to estimate the current tempera-
ture at the sensor. Since there are stochastic aspects
to the sensed environment (if the environment were
not stochastic there would be no need to use a sen-
sor), the actual parameter value can vary from that es-
timated. The amount of variation from the estimated
value obviously depends on the age of the information
that is used to make the estimate: the temperature at
10:05 AM is likely to be estimated very accurately if
the temperature at 10:00 AM was reported; by con-
trast, if the last temperature report was at 8:00 AM,
the estimate is likely to be of poorer accuracy.
In our environmental model, we do not model the
actual value of the sensed variable. Instead, we model
the difference, δ, between the actual value and the
projected value. It is in this difference that all the
stochastic nature of the environment is captured. For
example, if the sensed variable is treated as falling
in some set of discrete quantities (which is the case
in finite word-length machines even if the underlying
sensed variable is continuous), we use the probability
mass function (pmf), π
δ
(∆), of the additional devia-
tion, ∆, of the actual, from the projected (or modelled)
value, arising from the passage of one sampling pe-
riod. That is, if the state variable was last reported at
sampling point n, the divergence from the projected
value would be ∆
1
+···+∆
m
at sampling point n+m,
where the ∆
i
follow the pmf π
δ
(·).
It is important to recognise that our algorithm does
not require a prior model of the environment to be
available. If one such is available, it can be used to
project into the future, the value of the next parameter
sample. A simple case would be where, for instance,
the ∆
i
can be modeled as i.i.d. random variables. For
example, in our numerical examples, we assume for
concreteness that π
δ
(·) is a geometrically distributed
random variable truncated at some maximum devia-
tion: π
δ
(i) = Kα
|i|
if −D
max
≤ i ≤ D
max
and 0 oth-
erwise, where α is a constant characterizing the ran-
dom process, K is a normalization constant and D
max
is some given truncation point.
However, if such a prior model is not available, we
can simply use some extrapolation techniques based
on recent observationsto project what the next sample
value will be.
Regardless of whether we use an environmental
model, extrapolation, or a combination of the two, the
sensor is able to replicate, without communication,
the value that the base station would project (based
on its prior transmissions) in the absence of a report
of its current value. In other words, the sensor can
calculate what the base station would estimate for the
current value of the parameter based on the prior sen-
sor reports. Since it has the actual measured value of
the current parameter value, it knows the divergence
between these two quantities.
3.2 Cost Measure
Our cost measure is the sum of the absolute errors as
a result of not reporting the value of every sample that
is measured. That is, let B
i
be the broadcast indicator
function,
B
i
=
1 if sampling point i is reported
0 otherwise
Define L
i
as the last sampling point prior to i whose
value was reported. Then, the aggregate cost incurred
up to (and including) some sampling point i is given
by
Θ(i) =
i
∑
j=1
(1− B
i
)
"
L
i
−1
∑
k=1
|∆
k
|
#
AdaptiveDataUpdateManagementinSensorNetworks
477

where the ∆
k
are, as specified before.
This cost measure allows us to carry out approxi-
mate accuracy balancing. That is, for a given amount
of available energy, we try to ensure that the accu-
racy of the best value at the sink node (base station) is
roughly balanced over the lifetime of the system.
Our algorithms are by no means limited to this
cost measure. They can, in fact, take any other cost
function that may be more appropriate to the applica-
tion.
4 FIXED ENERGY BUDGET AND
FINITE MISSION LIFETIME
We start by considering the problem of a fixed en-
ergy budget (provided, for example, by a battery) and
a specified finite mission lifetime. Generally, sens-
ing consumes very little energy and so the number
of broadcasts that the sensor still has energy for ade-
quately characterizing the amount of energy available.
(It is not difficult to relax this assumption by slightly
inflating the energy required for transmission; we in-
clude it because it simplifies our description). We will
therefore define the energy state at any moment as the
number of broadcasts the node is still able to make.
We will assume a simple energy model in which
battery leakage and fading are considered negligi-
ble. Also, we assume that the time between sampling
points is sufficient for the battery to recover from the
(heavy) power draw associated with transmission. If
this is not the case, one can use battery models to
capture this effect: in prior work, Krishna (2011) has
shown how this can be done.
The baseline algorithm against which to compare
our lightweight heuristics is to space the reporting in-
stances as evenly as possible. More concretely, sup-
pose the operating lifetime consists of N sampling
points and we have enough energy only for r trans-
missions. If N = ℓr+ρ for some integer 0 ≤ ρ < r, we
have r− ρ instances where we report every ℓ samples
and ρ instances where we report every ℓ + 1 samples.
4.1 Known Parameter Statistics
When the statistics of the parameter being sensed
are known, we can analytically obtain an appropri-
ate thresholding scheme. If the estimated value ac-
cording to this model diverges from the actual value
(as sensed) by more a specified threshold, the sensor
transmits. Suppose the interval between successive
samples is τ and the target lifetime of the network is
T. Denote the threshold by θ and, as before, r as the
number of transmissions for which we have energy.
To ensure accuracy balancing, we use our knowledge
of the parameter statistics to set θ so that the average
inter-transmission duration is approximately T/r.
Example: Suppose our knowledge of the sensed pa-
rameter is such that the error (between the estimated
and the last reported measurement) can be modeled
as a Wiener process with zero drift and variance σ
2
.
We obtain θ as follows. Consider a Weiner pro-
cess, whose initial value is 0. This represents the
divergence from the sensed value at the last time a
sample was taken and transmitted. Set up absorbing
boundaries for this random walk at θ and −θ. Cal-
culate the expected first passage time from the ini-
tial state to one of the boundaries. This is given by
E[t
firstPassage
] = θ
2
σ
−2
((Domine 1995)). Now, se-
lect θ so that the E[t
firstPassage
] = T/r. This yields
θ = σ
p
T/r.
In general, let g
n
(∆
1
,∆
2
,·· · ,∆
n
) be the joint density
function of the deviations of the parameter measured
τ,2τ,·· · ,nτ seconds after the previous measurement.
Denote the time between successive transmissions by
t
s
. Define S
i
= ∆
1
+ ··· + ∆
i
. Then, from our knowl-
edge of the system statistics, we can calculate the fol-
lowing terms:
Prob(t
s
> τ) = Prob(S
1
< θ)
Prob(t
s
> 2τ) = Prob(S
1
< θ;S
2
< θ)
.
.
.
Prob(t
s
> nτ) = Prob(S
1
< θ;··· ;S
n
< θ)
The mean time between transmissions is given by
ξ = τ
∑
∞
n=1
P(t
s
> nτ). Now, set ξ = T/r and solve
(either numerically or analytically depending on the
complexity of the expressions) this equation for θ.
4.2 Unknown Parameter Statistics
When the behaviour of the parameter being sensed is
not known, we can proceed in one of two ways. First,
we can start with some default setting of the thresh-
old and use Bayesian or other methods to learn the
dynamics of the parameter being sensed. This does,
however, impose an overhead on the system, of cal-
culating and maintaining posterior distributions rep-
resenting current knowledge. In this section, we look
at a much simpler method that bypasses the need to
measure parameter dynamics.
In particular, we now present and evaluate a sim-
ple adaptive thresholding heuristic. As mentioned be-
fore, the sensor can assess the current value as es-
timated by the base station, in the absence of this
current transmission. If the current error, defined as
the absolute deviation of the actual current value (as
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
478
known to the sensor) from this estimated value at the
base station is not less than the threshold, the node
transmits. The threshold is adaptively increased or
decreased depending on the ratio of the number of
transmissions that are still possible to the number of
sampling epochs to go to the end of the mission. The
pseudocode is provided in Figure 1.
actual ratio=no of trans still possible/no of sampling epochs left
target ratio= no of trans initially possible/total no of sampling epochs
if (actual ratio
≥
1)
adaptive threshold=1
else if (actual ratio
>
target ratio)
adaptive threshold++;
else if (actual ratio
<
target ratio)
adaptive threshold--;
if (current error
≥
adaptive threshold)
transmit
Figure 1: Pseudocode for Adaptive Thresholding Heuristic.
4.2.1 Simulation Results
As mentioned earlier, in our simulations for this pa-
per, we assume (unless stated otherwise) that the de-
viation from the projected value is geometrically dis-
tributed, i.e., the pmf of the deviations is given by
π
δ
(i) =
Kα
|i|
if − D
max
≤ i ≤ D
max
0 otherwise
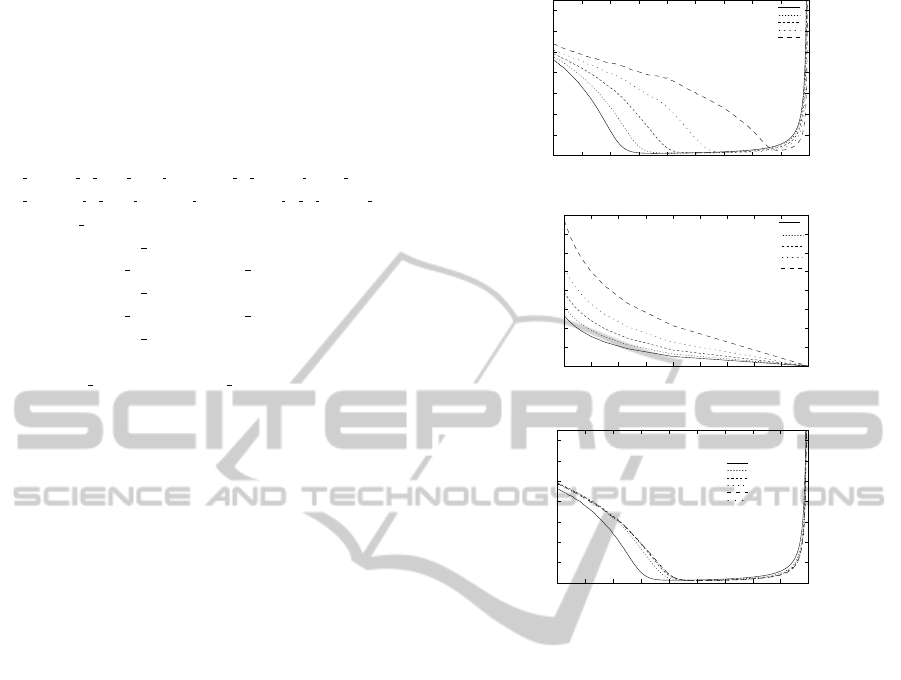
Figure 2 provides some performance results. The
Starting Energy Ratio (SER) is the ratio of transmis-
sions that are possible to the number of sampling
epochs. For low SER, the adaptive thresholding al-
gorithm offers no meaningful savings over the base-
line algorithm; indeed, for some extremely low val-
ues, it may actually perform a little worse. The rea-
son is that it takes a few adjustments for the thresh-
old to settle down to an appropriate value; if no more
than a handful of transmissions is possible, the system
may spend most of them while the threshold is still
adjusting significantly. For other regions, the adap-
tive thresholding algorithm significantly outperforms
the baseline until SER approaches 1. At this point,
we have so much energy that the baseline performs
very well; the adaptive thresholding algorithm now
performs worse than the baseline because it was ini-
tially much too parsimonious while still in its initial
phase of adjusting for the correct threshold. In other
words, when SER is very low, the heuristic loses out
(in relative terms) because it was initially too prof-
ligate with transmissions; when SER approaches 1,
because it was initially too stingy. This can obviously
be dealt with by setting the initial value of the thresh-
old based on our knowledge of how much energy is
D =3
max
Adaptive to Baseline Cost Ratio
Starting Energy Ratio
0
0.6
0.8
1
1.2
1.4
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
α=1/5
α=1/4
α=1/3
α=1/2
α=1
0.2
0.4
(a) Heuristic Performance wrt Baseline
max
D =3
Starting Energy Ratio
Expected Total Baseline Cost
α=1/4
600
800
1000
1200
1400
1600
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
α=1/5
200
0
α=1
α=1/2
α=1/3
400
(b) Performance of Baseline
max
D
Max Per−Step Abs. Deviation
Adaptive to Baseline Energy Ratio
Starting Energy Ratio
0.2
0.4
0.6
0.8
1
1.2
1.4
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
10
5
4
3
2
0
1
(c) Impact of D
max
Total number of Sampling Epochs = 500; initial threshold = 5
Figure 2: Heuristic Performance: Impact of α.
available. However, note that this is the effect of what
is essentially a startup transient; its relative effect on
the overall performance will therefore dwindle as the
system lifetime goes up.
For smaller values of α, the chances are higher
that the deviation will be small. Figures 2(a) and
(b) show the deterioration that happens with increas-
ing α. When α = 1, the the variation is uniformly
distributed from −D
max
to D
max
. Note that when
SER = 1, the baseline algorithm has enough energy
to transmit each sample, so that the base station has
all the samples and therefore zero cost.
Figure 2c shows the impact of the deviation am-
plitude, D
max
, in each sampling epoch. As might
be expected, when D
max
is just 1, there is not much
variation and the heuristic performs quite well. As
D
max
increases, the variation per step increases, and
the heuristic deteriorates slightly. However, beyond
D
max
= 2, the relative performance of the heuristic is
insensitive to the value of D
max
. Henceforth, unless
otherwise stated, all numerical results are provided
for D
max
= 3.
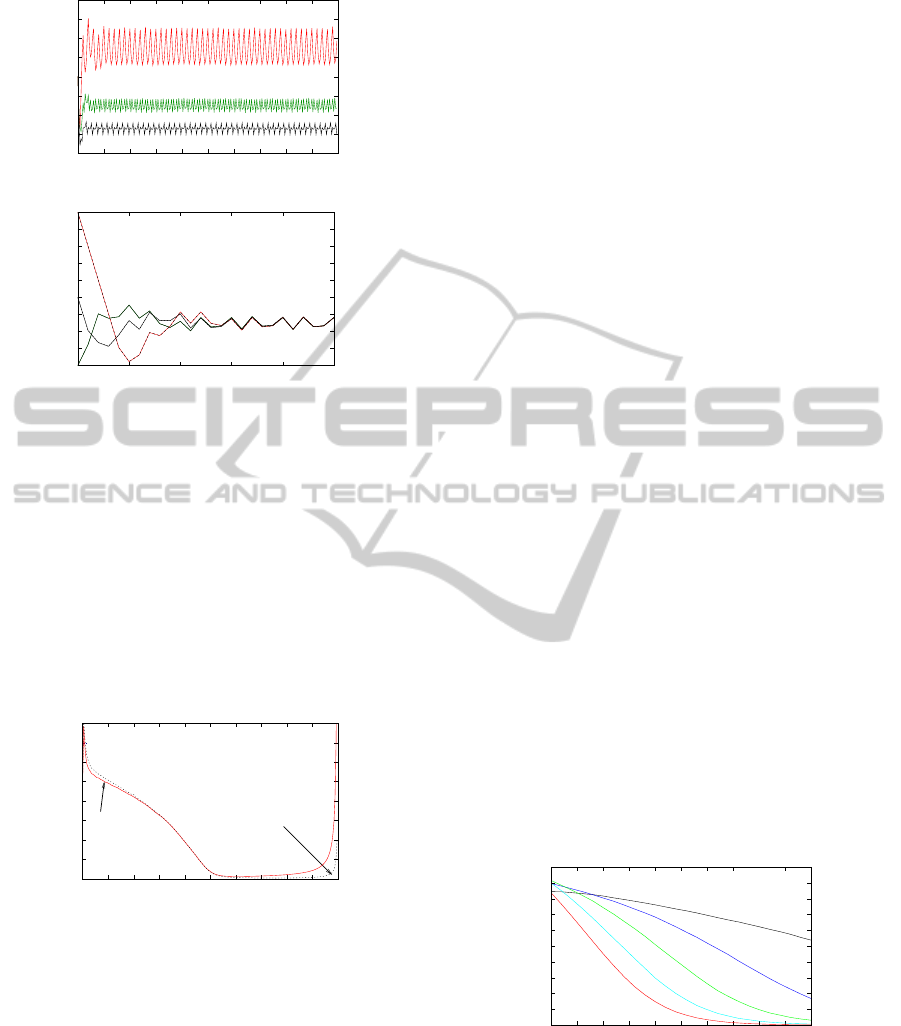
Figure 3 shows the way in which the threshold
AdaptiveDataUpdateManagementinSensorNetworks
479
Starting energy=30%
Adaptive Threshold
Fraction of Total Mission Time
Starting energy=20%
Starting energy=10%
1
7
8
9
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
5
4
3
2
6
(a) Threshold Adaptation
Threshold
Fraction of Mission Lifetime
1
4
5
6
7
8
9
10
0 0.02 0.04 0.06 0.08 0.1
1
2
3
4
5
6
7
8
9
10
0 0.02 0.04 0.06 0.08 0.1
2
3
(b) Impact of Initial Threshold Value
Figure 3: Threshold Variation with Time.
varies with time. After an initial transient, depending
on the initial value of the threshold (see Figure 3b),
the threshold settles into a fairly narrow range. An
obvious question from this figure is whether low-pass
filtering the thresholds will have a positive effect on
performance by damping down on the variations. Fig-
ure 4 indicates that any such gains will be minimal:
here, we carry out low-pass filtering by using as the
actual threshold the average of the past five threshold
values.
Threshold
Starting Energy Ratio
Unfiltered Lowpass Filtered
0
1
1.2
1.4
1.6
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0.6
0.4
0.2
0.8
Figure 4: Impact of Low-Pass Filtering of Threshold.
5 ENERGY HARVESTING
If sensor networks must work indefinitely, they re-
quire some means to harvest energy from the operat-
ing environment. Various approaches have been stud-
ied for this. The most commonly suggested method
for outdoor networks is to use solar cells feeding into
a rechargeable battery or a supercapacitor. Other ap-
proaches include using wind energy and energy from
vibrations, using a piezoelectric transducer.
Any system that harvests energy from the envi-
ronment must be prepared to put up with the inherent
variability in power inflow. For example, solar har-
vesting is obviously subject to the diurnal cycle; in
addition, there is the incidence of clouds and dust. To
smooth out these effects, we require an energy store
that can be used to smooth out these variabilities. The
size of the energy store is a design issue; if it is too
small, the system will be highly vulnerable to varia-
tions in power inflow; if it is too large, it will be very
expensive.
The sensing model is as described previously. The
energy model is as follows. The sensor has a repos-
itory of energy which is replenished continuously by
energy harvesting and depleted by message transmis-
sion. As before, to simplify our description, we as-
sume that transmission is the dominant energy con-
sumer; computation and sensing are negligible by
comparison. Energy inflow is stochastic; the proba-
bilistic laws governing it are assumed to be known to
the user. At each sampling instant, the sensor deter-
mines whether or not its datum is worth transmitting
based on the energy available to it and the error that
would result at the base station from not transmitting.
We present here an adaptive thresholding algo-
rithm and compare it against a baseline greedy al-
gorithm. The parameter statistics are assumed to be
unknown. We continue to study adaptive threshold-
ing algorithms when the parameter statistics are un-
known. Perhaps the simplest adaptive thresholding
algorithm is to increment the threshold at a sampling
point whenever the energy store is empty (defined as
being too small to support even one data transmis-
sion), and to decrement it when the energy store is
full. Such an approach does not require one to keep
track of energy inflows or outflows: only the amount
of energy stored at any given moment (which can eas-
ily be measured).
D_max=3
Storage Capacity=5
Adaptive to Baseline Energy Ratio
Mean Power Inflow
α=1
0
0.6
0.7
0.8
0.9
1
0.2 0.3 0.4 0.5 0.6 0.7
α=1/4
α=1/5
α=1/3
α=1/2
0.4
0.3
0.2
0.1
0.5
Figure 5: Performance of Thresholding Algorithm.
Figure 5 shows the performance of this algorithm
relative to the baseline. The power inflow is in units
of transmission energies per sampling interval; we as-
sume in this simulation that the inflow is normally
distributed with standard deviation equal to the mean,
and conditioned on falling in the interval [0,2µ] where
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
480

µ is the mean.
For very small power inflows, there is no real
advantage over the baseline algorithm: the system
is energy-starved. As power inflows increase, the
performance improves markedly as compared to the
baseline. The algorithm becomes more effective com-
pared to the baseline as the deviations of the underly-
ing sampled variable are more clustered around 0 (i.e.,
small values of α) and less effective when the devia-
tions are uniformly distributed over ±D
max
(α = 1).
6 DISCUSSION
We have developed lightweight algorithms to keep
the minimum accuracy at the base station as balanced
as possible over the given period of operation. The
aim is to pace the sensor transmissions appropriately
given the energy constraints. We have considered two
models: one in which there is a fixed energy bud-
get and another in which there is an energy store (a
rechargeable battery or a supercapacitor are the most
convenient options) that is replenished by means of
energy harvesting. Such an approach is likely to be
useful in applications involving long-term environ-
mental monitoring.
ACKNOWLEDGEMENTS
This research was partially supported by the National
Science Foundation under grant CNS-0931035. The
author thanks the reviewers for their helpful com-
ments.
REFERENCES
H. Ahmadi and T. Abdelzaher, (2009) “An Adaptive-
Reliability Cyber-Physical Transport Protocol for
Spatio-Temporal Data,” IEEE Real-Time Systems
Symposium.
S. Chalasani and J. M. Conrad, (2008). “A Survey of
Energy Harvesting Sources for Embedded Systems,”
IEEE SoutheastCon, pp. 442–447.
M. H. DeGroot, (2004). Optimal Statistical Decisions, Wi-
ley.
A. Deshpande, C. Guestrin, S.R. Madden, J.M. Hellerstein,
and W. Hong, (2004). “Model-Driven Data Acquisi-
tion in Sensor Networks,” 30th VLDB Conference.
M. Domine, (1995). “Moments of the First Passage Time
of a Wiener Process with Drift Between Two Elastic
Barriers,” Journal of Applied Probability, Vol. 32, No.
4, pp. 1007–1013.
S. Goel and T. Imielinski, (2001). “Prediction-Based Moni-
toring in Sensor Networks,” ACM Computer Commu-
nications Review, Vol. 31, No. 5.
Q. Han, S. Mehrotra, and N. Venkatasubramanian, (2007).
“Application-aware Integration of Data Collection and
Power Management in Wireless Sensor Networks,”
Journal of Parallel and Distributed Computing, Vol.
67, pp. 992–1006.
A. Kansal, J. Hsu, S. Zahedi, and M.B. Srivastava, (2007).
“Power Management in Energy Harvesting Sensor
Networks,” ACM Transactions on Embedded Comput-
ing Systems, Vol. 6, No. 4, September 2007, Article
32.
C. M. Krishna, (2011). “Managing Battery and Supercapac-
itor Resources for Real-Time Sporadic Workloads,”
IEEE Embedded Systems Letters, Vol. 3, No. 1, pp.
32–36.
C. Moser, D. Brunelli, L. Thiele, and L. Benini, (2007).
“Real-Time Scheduling for Energy Harvesting Sensor
Nodes,” Real Time Systems, Vol. 37, pp. 233–260.
G. Park, C. R. Farrar, M. D. Todd, W. Hodgkiss, and T. Ros-
ing, (2007). “Energy Harvesting for Structural Health
Monitoring Sensor Networks,” Los Alamos National
Labs, LA-14314-M5, February 2007.
S. M. Ross, (1970). Applied Probability Models with Op-
timization Applications, New York: Dover Publica-
tions, 1992.
S. Santini and K. Romer, (2006). “An Adaptive Strategy
for Quality-Based Data Reduction in Wireless Sensor
Networks,” International Conference on Networked
Sensing Systems, pp. 29–36.
M. A. Sharaf, J. Beaver, A. Labrinidis, and P.K. Chrysan-
this, (2004). “Balancing Energy Efficiency and Qual-
ity of Aggregate Data in Sensor Networks,” VLDB
Journal, Vol. 13, No. 4, December 2004, pp. 384–403.
V. Sharma, U. Mukherjee, and V. Joseph, (2010). “Optimal
Energy Management Policies for Energy Harvesting
Sensor Nodes,” IEEE Transactions on Wireless Com-
munications, Vol. 9, No. 4, p. 1326.
AdaptiveDataUpdateManagementinSensorNetworks
481
