
Multi-Agent System for Adaptation of Distributed Control System
Dariusz Choiński and Michał Senik
Silesian University of Technology, ul. Akademicka 16, 44-100, Gliwice, Poland
Keywords: DCS, Multi-Agent Systems, Ontology, Java, .Net, JADE, FIPA, OPC, XML, NHibernate, Hybrid Systems,
Concurrent Programming, Knowledge Sharing, Learning.
Abstract: A solution based on Multi-Agent Systems properties has been proposed. The presented structure is designed
to Distributed Control System behaviour abstraction and encapsulation of the technical characteristics of its
individual elements such as OPC (OLE for process control) servers. An ontology facilitating the creation of
user interface for Multi-Agent System environment has been proposed. This ontology is based on a set of
concepts and symbols understandable for the operator and the knowledge defining the hierarchical structure
of object. Presented solution is not only a conception but it is a real, cross platform implementation based on
the both Java and .Net programming platform. It practically shows how new programming solutions, tools
and methodologies can be integrated and reused to solve real life, practical automation system problems.
1 INTRODUCTION
Distributed Control Systems (DCS) are one of the
cornerstones of modern industry, which aim to
achieve high flexibility and customization of
production. Such objectives require reconfiguration
of the control system. However, the idea of software
architecture and modern measurement and control
systems are not prepared conceptually for such
purposes (Strasser et al., 2011). Adaptation of DCS
to changing requirements and configuration involves
the integration of various components of their
architecture and is a major programming challenge
(Vyatkin, 2011). In case of such adaptation the
programmer is forced to define and reallocate
resources of DCS. However, this operation is usually
performed only in the design or upgrade of the
system. This is because such activities are required
for system designers and not their users. Therefore,
the integration is carried out mostly in the
connection of software components through the
communication protocols. Providing a dynamic
adaptation, DCS during its operation must address
the problem of operating mechanism for data sharing
and allocation of resources.
The solution presented in this paper concerns the
use of the OPC standard and Multi-Agent System
(MAS) (Metzger and Polakow, 2011). OPC standard
(Iwanitz and Lange, 2006) was established as a
method for efficient communication between
automation devices and systems. One of the basic
specifications is the OPC DA (Data Access)
specification. It defines the communication between
the client and the server hosting the real time process
data. Data Access Clients have access to data from
the automation system via Data Access Servers.
Communication interface between the client and the
server is completely independent of the physical data
source. OPC DA specification also defines two main
structures for describing data shared by the server.
These are the namespace (Namespace) and OPC
objects (Figure 1). Namespace is used to produce
data structured in a tree structure, provided by the
OPC server. The structure of the OPC objects is
created by the client user. OPC object, within the
established structure, is attributed to identifiable
characteristics, such as: the value of the
corresponding variable, time of measurement,
quality measurement and other (Choinski and Senik,
2010, 2011).
The idea of communication between agents,
using serialization of speech acts requires the
creation of an ontology that allows the partition of
the message by the agent, so that the intentions of
the objectives are clear and unambiguous. At the
same time it should be a feature of the ontology that
it is as easily processed by both man and machine.
The interface of the user wanting to work with
multi-agent environment should be located in a way,
so that it operates on the same ontology as agents
operate on. The effect of this reasoning is the
206
Choi
´
nski D. and Senik M..
Multi-Agent System for Adaptation of Distributed Control System.
DOI: 10.5220/0004034902060211
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 206-211
ISBN: 978-989-8565-21-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
concept of using, for the development of ontology, a
set of terms and symbols understood by the operator
and used by him for categorizing and prioritizing the
knowledge of the object. The rationale for the
development of the basis of ontology is the choice of
language that is independent from the specific area
of ontology application. Therefore, it has been
decided to incorporate the definition of structures
utilizing the OPC standard into the ontology
dynamic adaptation of the control system (Choinski
and Senik, 2010).
Host
Agent
OPC
Server
OPC Objects
Client_Agent
OPC Group_0
OPC Item_Leaf_00
...
OPC Item_Leaf_0n
...
OPC Item_Leaf_nn
OPC Group_n
OPC Item_Leaf_n0
OPC Namespace
Root
Branch_n
Leaf_n0
...
Leaf_nn
Branch_0
Leaf_00
...
Leaf_0n
Figure 1: OPC Server hierarchical structure and MAS
integration scenario.
Structure of the transmitted information is
particularly important in the use of Multi-agent
technology in control and design of control systems.
The set of concepts, which in this case is a
description list of the data points, used and
controlled variables in the whole process of
designing the control system and its software is
practically constant. What changes mainly is the
structure of mutual connections and the structure of
the information used for decision making and
activities related to the control.
An obvious advantage of the system of agents
that communicate using messages based on a
universal definition of a standard FIPA
(Bellifemineet al., 2007) is the ability to remote boot
services, regardless of the particular software
implementation. Within the commonly used
protocols in the DCS, it is necessary to know the
structure of instances of the individual objects
performing services or storing information
(attributes). However, for the MAS, the fact that
there is no need to have this knowledge is laden with
the necessity of contribution to the development of
an ontology resulting in complexity comparable to
the development of the transmission protocol. A
class of distributed system is determined by the
technical sophistication used in the transmission
protocol. The same way, the “intelligence” of agents
may not be better than the ontology designed for
those agents. Thus, the principle of creating
ontology for communication in MAS is identical
with the description of the transmission protocol.
Similarly, the terminology glossary should be
defined describing terms used by agents in the area
of communication, hence the definition of agent
resources from the network side. In addition, a set of
defining the structure and relationships between
concepts must be defined, that is their semantics and
hierarchical structure.
2 MAS BASED APPROACH TO
THE DCS INTEGRATION
Resources as a part of the greater DCS usually are
treated as a source of a various different pieces of
information that needs to be integrated and analyzed
to be meaningful. This data is usually stored in a
resource’s hierarchical memory structures.
Process of the fast data collection and analysis is
an essential activity for each integration system that
as a result allows for the proper and efficient control
and maintenance. Both data and resource allocation
can change over time. It is a dynamic process and
because of that each such integration system must
follow strict rules to meet those challenging
conditions. Inability to respond to those conditions
drastically lowers down the integration system
quality and performance. In traditional integration
systems resources modifications are controlled
manually. This is because those systems are not able
to evolve. Each such system is designed to meet
only the current situation while the synchronization
process must be performed manually.
Synchronization process must take place always
whenever the resource changes its state otherwise
the problem of data integrity arises. Normally the
state of the resource changes due to data structure
reorganization or resource status modification. Each
such modification ought to trigger integration
system response which should notify the operator.
This is where the integration system’s reasoning
processes stops leaving all the synchronization
process up to the user. In order to enhance this
activity integration system ought to be designed to
be more autonomous. Autonomy of the integration
system is a complex task because it requires
additional analysis of the DCS as a whole from the
perspective of the each single integrated resource.
Performed analysis ought to treat resource as a finite
Multi-AgentSystemforAdaptationofDistributedControlSystem
207
state machine and result in explicitly defined state
set that would cover its whole functionality. It is
important noticing that those states must not lead to
the integration system deadlock. Each state should
have its predecessor and successor defined. This as a
result forms integration system states reachability
graph (Peterson, 1981). Moreover, each defined state
should describe how integration system will react
and respond to the resource behaviour. Integration
system designed in this way should also present an
open and scalable architecture that would allow the
system to respond to the dynamic DCS resources
changes to evolve and grow in time.
It is impossible to address all the mentioned
features using traditional approach during DCS
integration system design and implementation. All
features however can be easily introduced in the
MAS. Another crucial aspect of the MAS is the
presence of the formalized system knowledge
(Figure 2) which allows for independent reacting
and reasoning activities. MAS’s knowledge
fundamentals are usually modelled during system
design stage prior to any real implementation. This
knowledge is usually referred to as ontology.
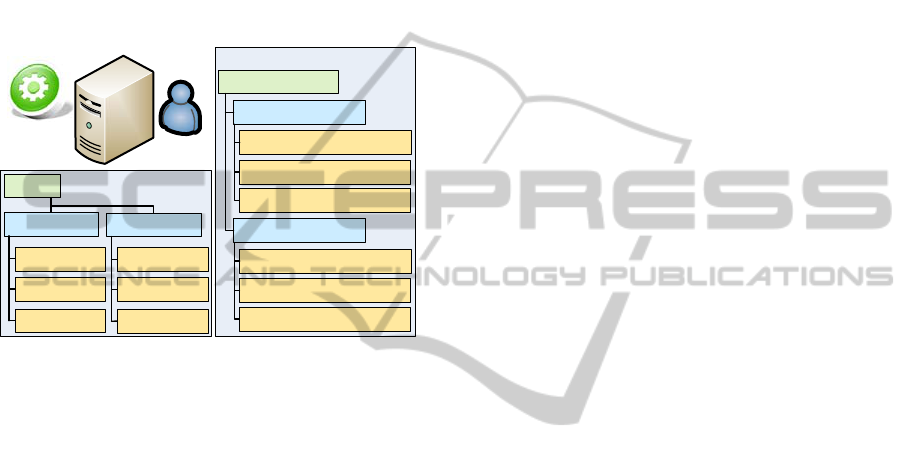
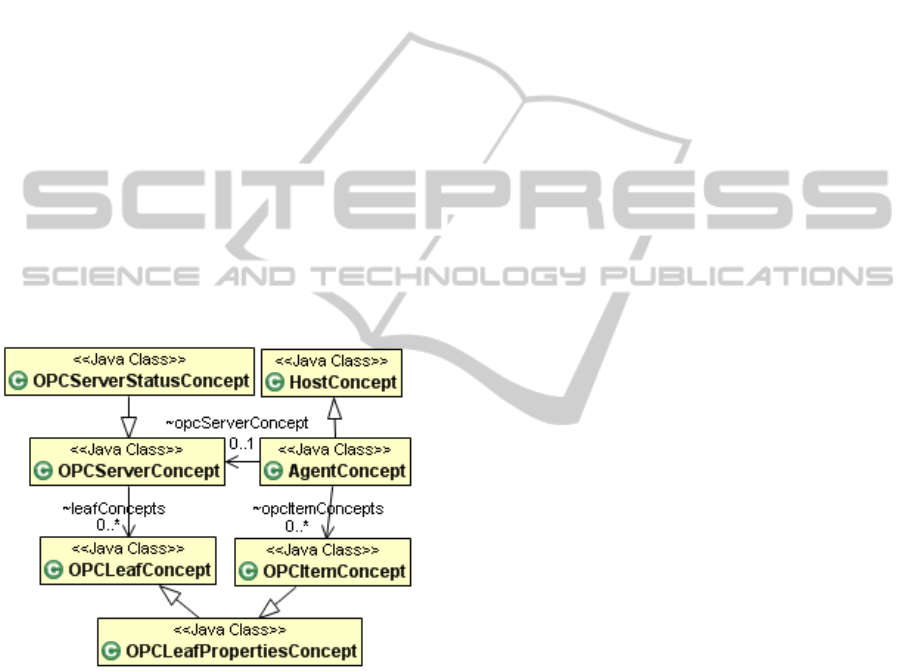
Figure 2: Ontology based knowledge representation –
OPC Server hierarchical data structure.
Ontology describes both static properties of the
system and its runtime states in which the system
can reside as well as the conditions of transitions
between those states. Ontology can also model the
integrated automation system resources (Figure 1,
2). Based on the ontology, MAS agents share their
knowledge and work together cooperating over the
integrated system’s problems (Choinski and Senik,
2010, 2011). Technically ontology is a set of very
simple and much more complex rules such as
concepts, predicates and actions which can be
created in many available programming
environments such as Java or .Net. (Choinski and
Senik, 2010, 2011). Each ontological expression can
be organized in a hierarchical structure which means
that simpler entities can be nested in more complex
entities. Agent’s reasoning capabilities reuse those
ontological structures during cooperation processes
over many different integrated system resources.
3 ONTOLOGY BASED
KNOWLEDGE MANAGEMENT
Having established the DCS ontology integration
and implementation phase can start. In order to
properly implement the system’s knowledge
management mechanisms additional architectural
aspects has to be introduced beforehand. It is worth
mentioning that ontology is not only the system
description, its expressions are also reused during
messaging and knowledge management processes.
MAS’s ontology concepts are the most basic carriers
of the various different pieces of information. Each
concept is explicitly described via the ontology
schema definition that specifies the rules under
which the concept ought to be structured. In most
situations concepts are used to form complex
hierarchical data structures that basically are passed
between sender and receiver asynchronously
updating their states (Figure 2). In order to
efficiently reuse those concept definitions during
runtime each concept must fulfil additional
conditions firstly drawn up by the object oriented
(OO) methodology. Each concept is nothing more
than a raw memory object that implements two
methods that should explicitly formalize its
uniqueness (HashCode method) and equality (Equals
method) (Sierra and Bates, 2008). This aspect is
consistent amongst the two currently leading OO
programming platforms such as Java and .Net.
Basically knowledge management is a comparison
of two different ontological concepts. Knowledge
sharing and management process (Figure 3, 4) is
always a two side task that occurs always whenever
two different agent entities enter into the cooperative
mode in which various different messages are passed
between them (Wooldridge, 2002). Each message
carries an ontological expression that can be reused
by the receiver agent to perform certain tasks and to
update its current knowledge. Agent knowledge
ought to be updated whenever an agent realizes that
passed ontology expression modifies its current
state. As a response receiver agent ought to generate
acknowledge message containing either original
message content or received message status flag.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
208

This message traverses back to the sender agent
modifying its knowledge about the receiver agent.
Each time new message is send, message’s
ontological content is compared against the
knowledge; sender agent gathered over time on the
receiver agent.
Figure 3: Ontology based knowledge sharing and
management general concept.
That way only needed data is send which drastically
minimizes both network traffic workload and agent
message processing time (Figure 3, 4).
Figure 4: Ontology based knowledge sharing and
management – Petri Net.
4 MAS PLATFORM DESIGN
Each MAS agent by performing its own tasks acts
on a behalf of its parent MAS platform. In order to
efficiently realize their tasks agents has to be
designed to cooperate with the assigned resource as
close as possible. Therefore agents must have the
ability to reach the resource physically i.e. agent
must be mobile (Wooldridge, 2002). That way MAS
resource agent can perform all the necessary
operations faster in data origin place sending only
the results of those operations. The extension of this
approach would be to design a mobile supervisory
agent that after reaching the source of the data
initializes whole package of various different agent
types that would cooperate with each other over the
given resource in one place forming a small, parent
MAS agent colony. Such agent colony can be treated
as a partially autonomous MAS that can act on a
behalf of its parent MAS. This approach allows for a
dynamic agent to resource allocation which results
in an anticipated on a design stage, MAS evolution
capability. This however could not be achieved
without the presence of agent environment discovery
mechanisms which are vital for the MAS
management (Bellifemine et al., 2007). In order for
the each newly created agent utilize existing MAS
platform knowledge it is required to manifest itself
in the platform via its name, address and services
names. It is also required to design and reuse the
MAS platform subscription mechanism because it is
much faster to obtain all the necessary pieces of
information from the various different MAS
platform points without asking.
Agent discovery and subscription
mechanisms are the key concepts of the agent
methodology that states that agents should not only
react in response of the external stimulus but take
over the initiative over the integrated system as well.
This explicitly means that agents are not simple and
reactive components but because of their features
agents are far more sophisticated and intelligent
entities entitled to reason about the DCS integration
system and enabled for the various different
proactive behaviours inside the MAS platform.
Design of the MAS integration system should
also involve layered aspect of the system
architecture. This is because MAS integration
system is not flat as it is purely hierarchical. Deep
analysis reveals that MAS integration system should
be divided into three main layers (Choinski and
Senik, 2011) i.e.: direct cooperation layer, agent
internal cooperation layer and user cooperation
layer. Each layer of the MAS integration system is
responsible for a specific set of activities. Direct
cooperation layer is responsible for the direct agent
to DCS resource cooperation. It is a backbone of the
MAS integration system because it provides whole
system with various pieces of the process
Multi-AgentSystemforAdaptationofDistributedControlSystem
209

information. Moreover it is a place in which initial
stage of the process analysis can be performed.
Agent internal cooperation layer forms all required
MAS integration system analysis and reasoning
fundamentals. User cooperation layer stands
between the user and DCS forming GUI that enables
human operator for the indirect system cooperation
including complex output data analysis. Direct
cooperation layer and agent internal cooperation
layer are hidden in the background of the MAS
integration system whereas user cooperation layer is
exposed entirely to the human operator making the
system maintainable, accessible and transparent.
Each of the presented design aspects makes the
MAS based systems far more scalable and robust
solutions in comparison to the traditional solutions
that presents neither autonomy nor openness and
scalability. Each MAS based solution is enabled for
the self management activities that enforce their
evolution over time. Each such activity drastically
increases DCS performance and quality.
5 MAXS PLATFORM
MAXS (Multi Agent Cross Platform System)
platform is a real time processing, hierarchical,
multilayered, MAS integration system capable of
dynamical adjustment to the existing information
structure (Leduc, Lawford, Dai 2006), (Choinski and
Senik 2011). It wraps over the existing JADE
framework (Bellifemine et al., 2007) using a set of
newly implemented agents thus creating a complex
MAS. MAXS can function on one or more remotely
controlled hosts, which may also vary in time. In the
current development stage, MAXS platform can
interact with various different OPC DA and database
servers. In addition to the JADE FIPA (Bellifemine,
Caire, Greenwood, 2007) specific communication,
MAXS platform agents simultaneously reuse
integrated databases as a parallel redundant
communication channel. Normally, MAXS reuses
database communication channel to store or update
both raw process data obtained from the system and
platform configuration settings that can be reused
during system restore. Integration with various
database servers is achieved by means of the
NHibernate (Dentler 2010) entity framework.
NHibernate framework is designed to be used over
the .Net platform only and in order to utilize it
MAXS platform was additionally integrated with the
.Net platform by means of the JADE Sharp. JADE
Sharp is a JADE add-on which comes as an
additional .dll library module which enables creation
.Net agents compliant with the JADE framework.
Original version of the JADE Sharp was proposed
by the TILab (Bellifemine, Caire, Greenwood 2007)
For the MAXS purposes, JADE Sharp add-on
module was strongly modified, refractored and
extended to fit the needs of the MAXS platform.
In order to establish efficient cross-platform
communication each MAXS agent reuses common
XML based messaging mechanism. The MAXS
platform establishes efficient cooperation with
various different OPC Servers through the Java
Native Interface (JNI) (Liang 1999).
MAXS platform (Figure 5) in the current
development stage consists of nine different types of
agents: Supervisory Agent (SA), Node Agent (NA),
Port Scanner Agent (PSA), Network Scanner Agent
(NSA), Management Agent (MA), OPC Agent
(OA), Discovery Agent (DA), Lifecycle
Figure 5: Implemented MAXS platform general design concept.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
210

Supervisory Agent (LSA) and Database Agent
(DBA). Complete description of all created agents
can be found in (Choinski and Senik, et al., 2010,
2011). MAXS layered architecture (Choinski and
Senik, 2011) presents openness and flexibility
which implies self management nature. It is a key
concept that satisfies dynamic conditions of the
integrated environment.
Self management functionality enables MAXS
platform agents to address both integrated
environmental issues and MAXS platform specific
events such as unexpected agent’s internal errors
or possible instabilities. Such approach allows fast
situation diagnosis and proper MAXS
counteraction. MAXS self management ability is a
fundamental feature that guards and preserves
system data integrity and quality. Each MAXS
agent shares similar capabilities making them more
compliant and consistent. Those capabilities are
the key concepts of the internal platform
architecture (Choinski and Senik, 2011).
To complete assigned tasks MAXS agents
reuses common set of fully customized and
concurrent behaviours (Choinski and Senik, 2010,
2011). Each one extends common mechanism of
knowledge sharing and management that utilizes
MAXS platform ontology.
MAXS reasoning model is based on the
subscription and notification mechanisms as well
as on the agent knowledge which is gradually
gathered over time from other platform agents.
6 CONCLUSIONS
The dynamic of the DCS is a normal situation
which has to be automatically handled in all
integration systems. Traditional approach to the
DCS integration seems to be insufficient to cover
most of the real life integration problems. Each
DCS grow and extend in time and the same should
happen with the integration system. Such system
must preserve an open architecture. It must be
scalable enough to follow the DCS extensions. The
solution to address those problems lays in adoption
of the proper methodology and architecture.
MAS based solution is the right choice that
meets the requirements of integration of the
dynamic environment. MAS DCS integration is
based on the proper resource knowledge
management. Presented ontology based knowledge
management is a generic mechanism. It helps
acquire all needed pieces of information based on
which analysis processes can be performed.
Ontology always gives a meaning to each tiniest
piece of information obtained from the integrated
system thus making it more understandable and
readable for both human user and agent entity.
ACKNOWLEDGEMENTS
This work was partially supported by the Polish
Ministry of Scientific Research and Higher
Education N N514 471539.
REFERENCES
Strasser, T., Zoitl, A., Christensen, J. H., Sunder, Ch.,
2011. Design and Execution Issues in IEC 61499
Distributed Automation and Control Systems. IEEE
Trans. on Systems, Man, and Cybernetics—Part C:
Applications and Reviews. Vol. 41, pp. 41¬51
Vyatkin, V., 2011.IEC 61499 as Enabler of Distributed
and IntelligentAutomation: State-of-the-Art Review.
IEEE Trans. on Ind. Inform. Vol. 7, pp. 768¬780
Metzger, M., Polakow, G., 2011. A Survey on
Applications of Agent Technology in Industrial
Process Control. IEEE Trans. Ind. Inform. Vol. 7,
pp. 570¬581
Iwanitz, F., Lange, J.: OPC – Fundamentals,
Implementation and Application. Huthig Verlag
Heidelberg (2006)
Choinski, D., Senik, M., 2010. Collaborative Control of
Hierarchical System Based on JADE. In: Y. Luo
(ed.), CDVE 2010, LNCS. Vol. 6240, Springer,
Heidelberg, pp. 262-269.
Choinski, D., Senik, M., 2011. Multi-Agent oriented
integration in Distributed Control System. In: J.
O'Shea et al. (eds.), KES-AMSTA 2011, LNAI. Vol.
6682, Springer, Heidelberg, pp. 231-240.
Bellifemine, F., Caire, G., Greenwood, D.: Developing
multi-agent systems with JADE. John Wiley & Sons,
Chichester (2007).
Peterson J. L.: Petri net theory and the modeling of
systems. Prentice Hall (1981)
Sierra, K., Bates, B.: Sun Certified Programmer for Java
6 Study Guide, McGraw-Hill (2008)
Wooldridge, M.: An Introduction to Multiagent Systems,
John Wiley & Sons Ltd (2002)
Leduc, R. J., Lawford, M., Dai, P.: Hierarchical
Interface-Based Supervisory Control of a Flexible
Manufacturing System. IEEE Transactions on
Control Systems Technology. 14, 654-668 (2006)
Dentler, J.: NHibernate 3.0 Cookbook. Packt Publishing
Ltd, Birmingham. (2010).
Liang, S.: The Java Native Interface Programmer’s
Guide and Specification, Addison-Wesley (1999).
Multi-AgentSystemforAdaptationofDistributedControlSystem
211
