
Flocking Approach to Spatial Configuration Control in Underwater
Swarms
Stefano Chiesa
1,2
, Sergio Taraglio
2
, Stefano Pagnottelli
3
and Paolo Valigi
3
1
Dipartimento di Informatica ed Automazione, University of Roma Tre, Via Ostiense 159, Rome, Italy
2
Robotics Lab, ENEA, Via Anguillarese 301, Rome, Italy
3
Department of Information and Electronic Engineering, University of Perugia, Via Duranti 93, Perugia, Italy
Keywords: Distributed Control Systems, Mobile Robots and Intelligent Autonomous Systems, Autonomous Agents.
Abstract: A modification of the flocking algorithm approach for a swarm of underwater vehicles is introduced. The
proposed approach relaxes the symmetry of the inter vehicle interaction. It is thus possible to change the
swarm spatial configuration assuming different formations with varying parameters. The swarm geometry is
changed with a very limited effort, exploiting the capability of the flocking approach to make emerge a
large scale arrangement. Examples of proposed variations are provided. The vehicles are dynamically
modelled and the relative non holonomic proportional derivative controller is described. Experimental data
are gathered from many vehicle physical simulations and graphically presented.
1 INTRODUCTION
Flocking is the behaviour exhibited by a large group
of birds while flying or foraging. This genre of
conduct can be found also among other animals:
fishes perform shoaling or schooling, bees swarm,
quadrupeds herd. Beginning with the seminal paper
of Reynolds (Reynolds, 1987), many different
authors have used this approach both to study animal
collective behaviour and to try mimicking it using
artificial entities such as robots (Ercan et al., 2010).
There are several results of formation control in
underwater robotic swarms, see (Hou and Cheah,
2011) and references therein. The usually considered
approaches can be classified in three major classes:
behavior-based (Monteiro and Bicho, 2002), leader-
following (Cowan et al., 2003) and virtual structure
method (Kalantar and Zimmer, 2007) (Hou and
Cheah, 2009). The artificial potential field is the
usual tool exploited to control a large swarm of
robots (Olfati-Saber, 2006).
The flocking approach in computer simulations
relies on the computation of simple functions at the
individual level. Each member of the group should
not collide with its fellows (repulsive behaviour),
should not loose contact with them (attractive
behaviour) and should orient itself in the average
direction of its neighbours (consensus term). It may
exist an optional further term describing some kind
of influence induced by the environment, typically
an attractive potential (swarm goal) and/or a locally
repulsive potential on objects (obstacle avoidance).
With a variable implementation of these simple
functions a flocking behaviour is set up.
A fundamental observation on these terms is
their dependence on the inter element distance and
not, for example, on direction, implying a radial
symmetry. In the following a modification of this
approach is proposed and investigated. The
symmetrical constraint on the inter agent functions is
relaxed. The introduction of some degree of
asymmetry allows the possibility to obtain different
spatial configurations for the swarm as a whole.
Through the tuning of some parameters, it is
possible to change the spatial arrangment of a swarm
in some measure. This possibility may open the path
towards several interesting applications.
In the second section the flocking basics and
proposed variations will be put forward. In the third
section the single vessel model and implementation
employed in the experiments will be outlined. In the
fourth section some experimental results will be
shown. Finally in the fifth section the conclusions
will be drawn and future direction of work outlined.
313
Chiesa S., Taraglio S., Pagnottelli S. and Valigi P..
Flocking Approach to Spatial Configuration Control in Underwater Swarms.
DOI: 10.5220/0004036903130316
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 313-316
ISBN: 978-989-8565-21-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

2 THE FLOCKING ALGORITHM
AND PROPOSED VARIATIONS
The basic recipe for a flocking algorithm is based on
the distribution of the control input law among the
single individuals, implemented as the sum of a
given number of components. In (Olfati-Saber,
2006) these terms are three: a inter vessel force term,
a velocity consensus term and a navigational
feedback one.
(1)
The inter vessel force term accounts for the
attractive and repulsive behaviour of the agents one
against another and can be written as:
(2)
where
and
are the vessel positions and
the
unitary vector along the line connecting
to
. The
argument of the function is the Euclidean norm.
The velocity consensus term tells the vessel to
orient itself towards the average direction of the
neighbours. The navigational feedback renders the
individuals aware of their environment (e.g. obstacle
avoidance, swarm goal). With this latter it is also
possible to set up a velocity consensus behaviour.
Once that these three terms are coded in the
individuals the time evolution of the swarm elements
produces a flocking conduct.
Let us consider the function in equation (2). It
codes both a repulsive and an attractive behaviour.
The average inter vehicle distance will depend of the
function characteristics. In dynamical terms this is
the force to be applied to the swarm element derived
from a convex potential. The minimum in this
potential is where no force is exerted on the agent
and the equilibrium configuration is reached, this is
linked to the parameters of the function. It is thus
possible to control the average inter vehicle distance.
In the following the inter vessel force has been
described by the function:
(3)
here
is a parameter dependent on the average inter
vehicle distance, its variation will change the swarm
configuration from compact to diluted.
The force function expressed in equation (3) is
here limited to the interval [0, 2
], see figure 1, the
main reasons for this are two. On one side it is
possible to automatically introduce a cut-off distance
on the visibility of agents (nearest neighbour
interaction); on the other side this prevents that the
contributions of all the many different vessels would
result in a global potential affected by interference
patterns which will disrupt the emergence of quasi
regular swarm formation. Many different functions
can be employed as soon as they show a repulsive
and attractive behaviour. Lennard-Jones or
Newtonian like potentials possess a singularity
whenever the inter vehicle distance goes to zero. A
physical vehicle cannot exert an infinite thrust to
avoid collision, thus the here chosen function can
implement a more realistic modelling, since it is
limited, see equation (3). Naturally this may imply
collisions among some vessels, due to the limited
amount of thrust. Nonetheless through an opportune
choice of
the swarm density can be lowered to
avoid such a dangerous situation.
Figure 1: The
of equation (3), a possible inter agent
force,
is in the inflection point.
An ellipsoidal distance is used to relax the radial
symmetry implied by the Euclidean distance:
(4)
Through equation (4) it is possible to break the
symmetry changing the three parameters a, b and c
thus introducing further control on the swarm spatial
distribution, in addition to that of its physical
dimensions, as achievable with the tuning of the
parameter in equation (3).
3 VESSEL MODEL
In the following a simplified vessel model is
employed. Each vessel is sketched as a massive
sphere that can be dynamically actuated through the
application of a thrust along the x axis (the propeller)
and can undergo two different torques: one around
the z axis (yaw) and one around the y axis (pitch); no
roll motion is considered.
ICINCO 2012 - 9th International Conference on Informatics in Control, Automation and Robotics
314

If a group of N actuated underwater robots with
six degrees of freedom is considered, their dynamics
can be described as (Fossen, 1994):
(5)
where the subscript i=1,...,N is relative to the single
individual of the swarm,
and
are respectively
the generalized coordinates expressed in earth fixed
frame and the body fixed velocity;
is the inertia
matrix,
is the matrix of Coriolis and centripetal
terms,
represents the damping forces and
denotes the generalized forces supplied by the
actuators. Inertial and Coriolis matrices take into
account the added mass terms (Fossen and Fjellstad,
1995).
The flocking model produces the desired force
to be exerted onto each vessel in order to obtain a
flocking behaviour. The low level robot controller is
a proportional derivative controller proposed in
(Hou and Cheah, 2011):
(6)
where
represent the transformation between
the earth fixed and the body fixed frames. In this
work
and
are positive matrices which are not
unconstrained, as in (Hou and Cheah, 2011), but
have been written in order to consider the non-
holonomicity of the vehicle, capable of limited
actuation, i.e. a thrust and two torques. In more
detail:
(7)
Furthermore the vessels are considered neutral,
i.e. the gravitational pull and the buoyancy are
assumed balanced.
Such a model is clearly simplified as confronted
with a full model taking into account all of the
underwater vehicle characteristics, nonetheless is
capable of capturing the fundamental features of a
vessel, allowing for an effective and physically
plausible implementation.
All of the simulations have been performed in
the Gazebo robotic simulator (Gazebo, 2012), which
is an Open Source software package that computes
all the dynamical aspects of the simulation, with the
possibility of a graphical rendering of the results.
4 EXPERIMENTAL RESULTS
In the following some experimental results are
presented. They are relative to two main sets of
experiments: the inter vessel distance control and the
formation emergence and evolution.
In all the experiments the swarm vehicles
implement a velocity consensus function through a
navigational feedback, i.e. an attractive potential
pulling each vessel towards the x direction is
operating at all times. At the same time the initial
AUV density is chosen as capable to aggregate a
single swarm entity. The control task here
considered is thus the implementation of a control
input represented by the inter vessel force while
being pulled along the x direction, i.e. making the
whole swarm follow a linear trajectory.
In the first set of experiments a spherical spatial
distribution is reached through the use of a radially
symmetrical potential. Subsequently the parameter
governing equation (3) is made slowly change and
the swarm reacts changing its spatial density. Here
are simulated 100 underwater robots, the measures
are in meters and the time in seconds.
Figure 2: The time evolution of the 100 robot swarm with
varying radius.
In figure 2 it can be seen the time evolution of
the swarm from an initial random distribution
(uniform) inside a box of sides circa 30x30x30 m, to
an intermediate stage of spherical distribution of a
given average diameter (15m). Then the parameter is
further changed obtaining a more diluted formation
(circa 25 m) and a final stage with the spherical
distribution back to 15m. The average diameter of
the spherical formation, , and the
of
equation (3) are linked by the linear relation:
.
In the second set of experiments the
asymmetrical ellipsoid distance is used to compute
the different components of the potential belonging
to the different vessels. In figure 3 is shown a swarm
Flocking Approach to Spatial Configuration Control in Underwater Swarms
315
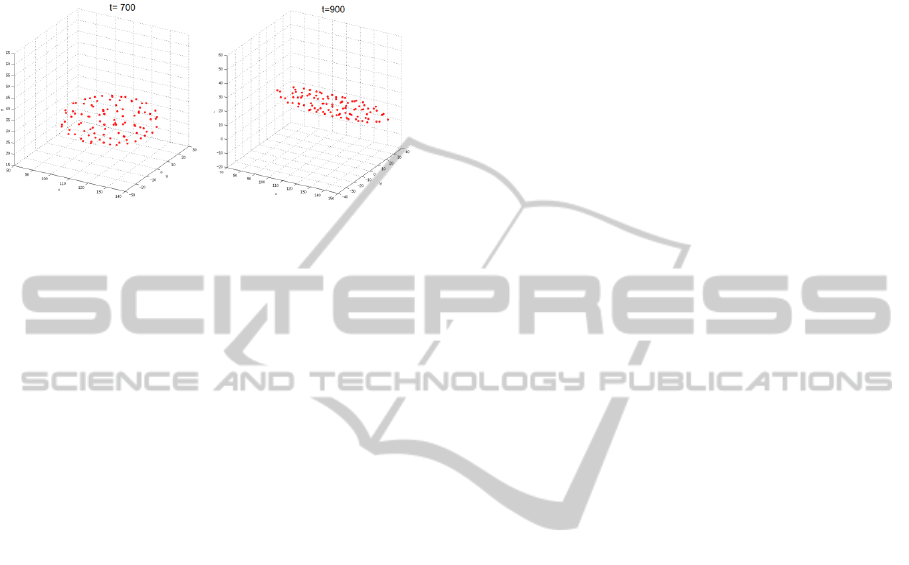
of 100 individuals in two final spatial distributions: a
flat ellipsoid and a cigar-like one. As an example,
the obtained flat formation can be exploited for a
search on the sea bed, while the cigar maybe used
for communications.
Figure 3: A flat ellipsoidal configuration and a cigar-like
one.
5 CONCLUSIONS
This work has been focused on the idea of exploiting
the flocking approach not to implement a naturally
plausible behaviour, but to make emerge a desired
spatial configuration in the swarm. In order to reach
this goal some asymmetry has been inserted in the
potential functions governing the flocking scheme.
To some extent such an idea can be found also in
Nature when dealing, for example, with the V-
shaped formation of migrating birds.
It has been here shown that through the tuning of
a limited set of parameters it is possible to
implement different swarm formations that can be
useful in different operative contexts. This allows
the possibility to contemplate human operator
control over a swarm of AUVs and the changing of
the swarm formation at the cost of the broadcasting
of a few bytes among the individuals.
Further work must be carried out: different three
dimensional functions should be studied and
simulated in order to find out new spatial
configurations. Stability issues must be studied and
checked since the here presented simulations have
the limit of implying instantaneous communication
and awareness among the swarm individuals. This is
not the case while coping with underwater vessels
whose communication capabilities are limited by the
speed of sound. Another issue is the study of the
ellipsoidal flock in more complex environments
such as the typically considered ones where
obstacles or narrow passages can be found, see e.g.
(Olfati-Saber, 2006).
ACKNOWLEDGEMENTS
This work has been partially supported by the
HARNESS project, funded by the Italian Institute of
Technology (IIT) through the SEED initiative.
REFERENCES
Cowan, N., Shakerina, O., Vidal, R., Sastry, S., 2003.
Vision-based follow-the-leader, in Proceedings of
IEEE/RSJ International Conference on Intelligent
Robots and Systems, vol. 2, pp. 1796–1801.
Ercan, M. F., Li, X., Liang, X., 2010. A Regular
Tetrahedron Formation Strategy for Swarm Robots in
Three-Dimensional Environment, in Lecture Notes in
Computer Science: Hybrid Artificial Intelligence
Systems, Berlin: Springer.
Fossen, T. I., 1994. Guidance and Control of Ocean
Vehicles, New York: John Wiley & Sons.
Fossen, T. I., Fjellstad, O. E., 1995. Nonlinear Modeling
of Marine Vehicles in Six Degrees of Freedom,
Journal of Mathematical Modeling of Systems, 1 (1).
Gazebo, computer software, 2012. Available from: http://
playerstage.sourceforge.net/. [27 Feb 2012].
Hou, S. P., Cheah, C. C., 2009. Multiplicative Potential
Energy Function for Swarm Control, in Proceedings
of the 2009 IEEE/RSJ Int’l Conf on Intelligent Robots
and Systems, St. Louis,USA, pag 4363-4368.
Hou, S. P., Cheah, C. C., 2011. Can a Simple Control
Scheme Work for a Formation Control of Multiple
Autonomous Underwater Vehicles?, in IEEE
Transaction on Control Systems Technology, 19 (5),
pages 1090-1101.
Kalantar, S., Zimmer, U. R., 2007. Distributed shape
control of homogeneous swarms of autonomous
underwater vehicles, in Autonomous Robots, 22 (1),
pag 37-53.
Monteiro, S., Bicho, E., 2002. A dynamical systems
approach to behaviour based formation control, in
Proceedings of the IEEE International Conference on
Robotics and Automation, vol. 3, pp. 2606–2611.
Olfati-Saber, R., 2006. Flocking for Multi-Agent Dynamic
Systems: Algorithms and Theory, IEEE Transaction
on Automatic Control, 51 (3), pag 401-420.
Reynolds, C. W., 1987. Flocks, Herds, and Schools: A
Distributed Behavioral Model, in Computer Graphics,
21(4), pages 25-34.
ICINCO 2012 - 9th International Conference on Informatics in Control, Automation and Robotics
316
