
Process-oriented Approach to Verification in Engineering
Ekaterina Auer, Roger Cuypers and Wolfram Luther
INKO, University of Duisburg-Essen, Lotharstr. 63, Duisburg, Germany
Keywords:
Numerical Verification Assessment, Validation, Uncertainty, Result Verification.
Abstract:
Common verification and validation methodologies suggest using verification benchmarks in the cases where
no theoretical proof of the model and algorithm accuracy is possible and interpreting the outcome of the
process of interest on these. In this paper, we propose to shift the focus on the process itself. Helped by
appropriate questionnaires, users are urged to subdivide their processes into smaller tasks and to classify the
input/output data and algorithms, which allows us to assign a certain initial verification degree to the (sub-)
process from a recently proposed four-tier hierarchy. After that, the initial degree can be improved as well as
uncertainty quantified by with the help of a selection of specialized interoperable data types and tools. Besides,
we address issues of software quality and user support by describing a comparison system for verified initial
value problem solvers.
1 INTRODUCTION
The demands on the quality of products developed in
engineering grow significantly every year. On the one
hand, the market requires shortening of the produc-
tion cycle and cost reduction, so that expensive pro-
totypes become uncompetitive and computer simula-
tions unavoidable. On the other hand, the need for en-
suring and testing the quality of the future system is as
high as ever, because there appear more and more ar-
eas where safety, reliability, and dependability analy-
sis play a crucial role. Most prominent examples here
are modeling and simulation for surgery, for nuclear
power plants or for aeronautics, but the same is true
for cell phone networks or for electronic commerce.
The increased demand for validity or at least credi-
bility of models and simulations lead to the appear-
ance of a common research direction inside many ap-
plication areas which addressed working out and for-
mally defining guidelines for verification and valida-
tion (V&V) of corresponding systems.
This paper aims at systematizing information on
V&V assessment and uncertainty treatment in engi-
neering with the focus on computer-based modeling
and simulation in biomechanics. Simultaneously, its
goal is to enhance the usual methodology with the
help of verified methods (Moore et al., 2009) where it
makes sense. Such methods provide a computational
proof that the outcome of a simulation is correct. Es-
pecially in the field of verification, these techniques
can be employed for entire processes or their parts
without the need to simplify them to known bench-
marks or special cases. Moreover, the areas of model
design and validation might profit from the ability of
verified methods to handle bounded uncertainty and
from verified sensitivity analysis. In the paper, we
provide general verification guidelines from our point
of view. An illustration for this is given in (Auer et al.,
2012), where the V&V process for the hip prosthesis
fitting is described.
There is a long tradition in the area of com-
putational fluid dynamics of developing and testing
methodologies and tools for verification and valida-
tion assessment. This process starts with precise defi-
nition of the involved concepts, in particular, verifica-
tion and validation themselves. The American Insti-
tute of Aeronautics and Astronautics and the Amer-
ican Society of Mechanical Engineers adopted the
following terminology (AIAA, 1998; ASME, 2006).
Verification is the process of determining that a model
implementation accurately represents the developer’s
conceptual description of the model and the solution
to the model, whereas validation is the process of de-
termining the degree to which a model is an accurate
representation of the real world from the perspective
of the intended uses of the model. These definitions
implicitly assume a certain notion of what a system
is. Here and in the following, we postulate that it is
possible to define and formalize the system to be en-
gineered in a structured and hierarchical form. Partic-
ularly, the system should be describable in such a way
as to allow for its later implementation on a computer.
513
Auer E., Cuypers R. and Luther W..
Process-oriented Approach to Verification in Engineering.
DOI: 10.5220/0004037905130518
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 513-518
ISBN: 978-989-8565-22-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

Still more particularly, we assume that the system (or
at least its parts) possesses a mathematical model. In
the following, we use the terms system, product, and
problem to be engineered interchangeably.
The known assessment methodologies usually
concentrate on mathematical modeling exclusively.
They rely on analytically solvable special cases and
simplifications as well as benchmark examples, so
that they do not providea definitivestep-by-step V&V
procedure immediately applicable by an engineer. A
major difference between our V&V understanding
and the traditional one is the approach to verifica-
tion advocated in this paper. Whereas common V&V
methodologies suggest using verification benchmarks
in the cases where no theoretical proof of the model
and algorithm accuracy is possible and interpreting
the outcome of the process of interest on these, we
propose to consider the process itself. Helped by ap-
propriate questionnaires, users are urged to subdivide
their processes into smaller tasks and to classify the
input/output data and algorithms, which allows us to
assign a certain initial verification degree from the
four-tier hierarchy developed in (Auer and Luther,
2009) to the (sub-)processes. After that, the initial
degree can be improved as well as uncertainty quan-
tified by using a selection of specialized data types
(e.g., enhanced interval arithmetic) and correspond-
ing algorithms. This step is not a part of traditional
V&V guidelines.
The issue of interoperability with respect to data
types, algorithms and hardware is of a great rele-
vance. For instance, users should have the possibil-
ity to combine interval-based and statistical software
(e.g., for the Monte Carlo method). On the one hand,
they would be able to solve problems which cannot be
treated with interval methods alone (e.g. if bounded
system parameters have outliers of significant mag-
nitude). One the other hand, they could compute the
solution in several ways in parallel as well as compare
and interpret the outcome of these different computa-
tional models.
The correlation between modeling/simulation and
verification/validationactivities is usually represented
as a cycle (Schlesinger, 1979). The first stage of the
cycle is to analyze the real world problem and to de-
velop a conceptual and a formal model for it. The
task of V&V assessment at this stage is qualification,
which includes determining the types of uncertainty
and methods for its treatment, relevant parametersand
their ranges, and quality of input/output data. Be-
sides, it might be profitable to carry out dependability
analysis at the early design stages. For example, if we
want to model human lower extremities, an inverted
double pendulum would correspond to the conceptual
model, whereas its equations of motion would consti-
tute the formal (mathematical) model.
The next step is to implement the formal model.
Here, verification is performed, the task of which is to
make sure that the formalized model is implemented
correctly in the sense established by requirements de-
vised during qualification. This is the stage where we
need to know the relationships between system ele-
ments (a structural system definition) and not solely
their inputs and outputs (a functional system defini-
tion). In general, the activities fall into the categories
of code verification (software quality analysis) and
(numerical) result verification. The latter can be car-
ried out in different ways. The usual methodology is
to assess the accuracy by using formal mathematical
proofs and analytical solutions. If that is not possi-
ble, simplifications, benchmark cases, and indepen-
dent computations are employed. If we return to our
biomechanical example once again, then the task here
corresponds to either implementing the double pen-
dulum using modeling and simulation software based
on a certain theoretical principle (e.g. the multibody
method) to obtain of its equations of motion or de-
riving them analytically. We suggest using methods
with automatic result verification such as intervals or
Taylor models (Berz, 1995) at this stage.
The third and probably most laborious step is val-
idation. The task of V&V assessment here is to com-
pare the outcomes of computerizedmodel simulations
or of a system prototype to reality, to establish the
degree of similarity using a (non-deterministic) val-
idation metric, and to address model fidelity. Al-
though is it not necessary to know the relationships
between system’s elements to perform simple valida-
tion, this knowledge is helpful if uncertainty were to
be included into the validation metric. In terms of a
biomechanical example given above, it is necessary
to compare the results of a computer simulation of
the double-pendulum-based model to the experimen-
tal data gathered with the help of real patients.
At all the stages of the cycle, sensitivity analysis
can be performed to identify the influence of parame-
ters in the model formulation (Henninger and Reese,
2010). Before the validation stage, it helps to single
out critical parameters. Performed after validation,
it ascertains whether or not experimental results lie
within initial estimates. Here, verified methods help
to avoid elaborate Monte-Carlo or parameter varia-
tion techniques and provide a possibility to deal with
whole ranges for parameters instead of concrete val-
ues.
Usually, developers have no absolute informa-
tion about the system to be engineered and its data
due to either the natural variability inherent to phys-
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
514

ical phenomena (aleatory, irreducible) or simply lack
of knowledge (epistemic, reducible) (Ferson et al.,
2003). That is, the whole modeling and simulation
process is influenced by uncertainty. It is necessary
to characterize model or parameter uncertainty at the
stage of qualification, propagate it through the system
and take into account discretization and rounding er-
rors at the stage of verification, and do not leave it out
while defining validation metrics at the last stage. The
propagation can be formalized by defining mathemat-
ical or set theoretical operations along with logical
expressions on uncertain numbers. Besides, higher
level algorithms such as for solving initial value prob-
lems might become necessary. Generally, it was sug-
gested to use probability theory based approaches for
purely irreducible uncertainty and interval methods
for purely reducible one. For combinations, such
methods as probability boxes, Dempster-Shafer belief
theory, and fuzzy set theory can be employed.
Interval methods offer a natural and comparatively
simple instrument for specifying the overall impreci-
sion in the outcome given the bounds on imprecision
in inputs. It is simple because set theoretical or mathe-
matical operations on intervals are easy to define, im-
plement and interpret. To define logical operations
such as < is more difficult conceptually, because the
set of interval numbers is not ordered in a natural way,
although a partial order can be readily introduced.
Besides, most known numerical types of algorithms
were adapted to intervals. A disadvantage of fast and
naive interval approaches is the already mentioned
problem of overestimation, which is especially no-
ticeable for multiple appearance of the same intervals
(with large widths) in mathematical expressions. That
means that interval methods cannot produce mean-
ingful results for problems with parameters having
known outliers of a considerable magnitude in princi-
ple. However, the dependency problem and the wrap-
ping effect can be countervailed by enhanced verified
methods such as affine arithmetic (de Figueiredo and
Stolfi, 2004) or Taylor models.
The terminology defined abovebuildsthe basis for
our further considerations. The paper is structured as
follows. In Section 2, we provide detailed process-
oriented verification guidelines supplemented by a
questionnaire. An important aspect of verification
stage in the V&V cycle is software quality analysis
and the subsequent software choice. To facilitate this
decision making process for the user in the area of dy-
namic simulations, we developed a comparison sys-
tem for verified initial value problem (IVP) solvers,
described in Section 3. Here, a special focus lies on
validatingthe employedsimilarity measure for bench-
mark problems. Finally, conclusions are in Section 4.
2 PROCESS-ORIENTED
VERIFICATION GUIDELINES
Here, we suggest an enhancement of the usual verifi-
cation methodology in the form of process-oriented
verification guidelines. As mentioned in the intro-
duction, verification stage comprises numerical re-
sult verification and the software quality analysis sup-
ported by testing process. Software quality analysis is
primarily directed toward establishing programming
correctness in the source code and in the system and
compiler software as opposed to numerical verifica-
tion, the goal of which is to assess the correspondence
between the outcomes of the computerized and for-
mal model. Numerical result verification presented
in, for example, (Oberkampf and Trucano, 2007), is
mainly focused on classical mathematical procedures
such as proofs for algorithms’ error estimations, on
analytically solvable special cases, and on benchmark
examples. We suggest to perform the result verifica-
tion step for the appropriately decomposed modeling
and simulation process for the targeted product using
methods with result verification. This can be com-
plemented by uniform strategies for sensitivity analy-
sis and uncertainty management at each step of the
respective V&V cycle. The approach is illustrated
in (Auer et al., 2012) for the computer-based hip pros-
thesis fitting process.
For the numerical verification stage of a complex
modeling and simulation process to be successful, we
propose to pursue the following four strategic goals
during the whole production cycle for a certain piece
of software (computerized model).
The first goal concerns designing the software for
the problem under consideration in such a way as for
it to be verifiable more easily later. It starts with
an informal description of the workflow to structure
the process in relevant sub-tasks. After that, applica-
tion context and ontology should be identified. After
choosing the model for the problem, it is necessary
to define its features along with requirements for it.
The requirements concern, for example, functional-
ities of the targeted software; expected performance
and necessity for parallelization or real-time execu-
tion; GUI/front-end design and configuration along
with user interaction (e.g. online or offline control
facilities). For the later stage of verification, the fol-
lowing specifications are especially important:
• exchange formats, schemes for meta data, their
integration into the software,
• data transfer, bandwidth, network, security, and
• documentation (reviews), repository.
Once the software is released, further requirements
address integration of middleware; software config-
Process-orientedApproachtoVerificationinEngineering
515

uration (settings) suitable for the task, calibration and
data flashing; customizing and user training.
The second goal is to define guidelines for devel-
oping a computational model and its formal descrip-
tion for the system. The guidelines should concern
system classification (technical, cognitive, or for in-
formation processing), knowledge representation (the
system model and interaction logic), action logic
(symbolic/algorithmic, functional/procedural, logi-
cal, Petri net, graph or grammar based), and hardware
architecture (CPU/GPU, distributed system, etc.).
The third goal should focus on the verification ex-
tent and the congruence assessment between the com-
puterized and formal models. Based on the informa-
tion acquired while persuing the above two goals, we
suggest assigning a certain degree to the modeling and
simulation process from the four-tier numerical veri-
fication hierarchy. This degree reflects the ratings of
all sub-processes and the kind of uncertainty assess-
ment. The initial estimation can be improved using
a selection of specialized data types and tools which
are chosen in dependance of what kind of action logic
was employed. For example, if the symbolic type was
used, that is, actual expressions for the mathematical
model are available, there exist verified tools in each
important numerical algorithms area such as solving
systems of equations, initial value problems, and op-
timization.
In this regard, interoperability with respect to data
types, algorithms and used hardware is of a great rel-
evance for developing highly verified software. Gen-
erally, modern programming languages support tem-
plates and implementation patterns which allow for
adaptive use of real, floating point, interval, fuzzy, or
stochastic data types and algorithms. In this way, it is
possible to choose the kind of computation according
to the task at hand, to perform different kinds of com-
putations (e.g. interval or floating point) in parallel,
and to combine them if it is not feasible to carry out
the whole computation using just one of them.
The fourth goal is devoted to user support. Here,
we suggest to employ recommender systems similar
to those from the area of e-commerce. They should
guide the user in questions of interactive task solver
selection, of result reporting, and of visualization.
The V&V assessment should be regulated by
questionnaires. They aid in organizinga complex pro-
cess with respect to initial data sources and their ac-
curacy as well as its parameter and result ranges. The
questionnaires should require precise description of
special functions, algorithms (e.g., as a UML activity
diagram), and employed mathematical operations. In
this way, they help to make process-wide decisions
about adequate data types and arithmetic, software
quality testing, numerical result quality measures, and
performance issues. Below, we give an example of
such a questionnaire which appeared in the scope of
the recent project PROREOP
1
.
In PROREOP, a consortium of engineers, biome-
chanicians, computer and medical scientists devel-
oped and evaluated new tools in training, plan-
ning and assessment of total hip replacement (THR),
which was broadly discussed from the perspective of
our working group in (Auer et al., 2011). The above
mentioned questionnaire was distributed among the
participants to identify accuracy issues of various al-
gorithms used in the project. By describing the algo-
rithms with respect to their data types, to initial and
resulting data, and to functionality, each group that
filled out the questionnaire contributed to the assess-
ment of accuracy and correctness for the correspond-
ing sub-process. The development of a requirement
pool helped us to bring all project parts into a coherent
software architecture. An important example is a su-
perquadric fitting algorithm with parameters defining
scaling, roundness, orientation, position and defor-
mation (tapering, bending, cavity), which was ranked
initially as belonging to Class 3 in the hierarchy and
was assigned a Class 2 degree after parts of it had
been verified (Auer et al., 2011).
We reproduce the questionnaire with some
abridgements and improvements. Its filled-out ver-
sion used in PROREOP for the reconstruction and fit-
ting approach is given in (Auer et al., 2012). The
first part is the description of input data with ques-
tions concerning its source, description form, possible
pre-selection technology, the corresponding accuracy,
and representation. The second part urges to charac-
terize the involved models using their formulas along
with the respective parameters and their ranges. This
part is followed by the description of the used algo-
rithms by their type (numeric/symbolic etc.), the de-
gree of parallelization, the employed elementary op-
erations along with their precision, the necessary sub-
algorithms, their detailed description, and their sensi-
tivity. Finally, the output data should be reported on
by specifying the corresponding data type and accu-
racy, the external requirements for high accuracy, and
possibilities for information exchange.
3 COMPARISON OF VERIFIED
IVP SOLVERS
Nowadays, there exist not just one but several tools
1
Development of a new prognosis system to optimize patient-
specific preoperative surgical planning for the human skeletal system
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
516
RIOT VALENCIA-IVP VNODE-LP
0.1
1
10
100
1⋅10
-14
1⋅10
-12
1⋅10
-10
1⋅10
-8
1⋅10
-6
1⋅10
-4
1⋅10
-2
1⋅10
0
CPU time (s)
width
18
19
20
33
35
37
0.01
0.1
1
10
1⋅10
-5
1⋅10
-4
1⋅10
-3
1⋅10
-2
1⋅10
-1
1⋅10
0
1⋅10
1
CPU time (s)
width
18
19
20
33
35
37
0.001
0.01
0.1
1⋅10
-16
1⋅10
-14
1⋅10
-12
1⋅10
-10
1⋅10
-8
1⋅10
-6
1⋅10
-4
1⋅10
-2
1⋅10
0
1⋅10
2
1⋅10
4
CPU time (s)
width
18
19
20
33
35
37
0.01
0.1
1
1⋅10
-14
1⋅10
-13
1⋅10
-12
1⋅10
-11
1⋅10
-10
CPU time (s)
width
10
17
21
32
34
36
0.01
0.1
1
10
1⋅10
-5
1⋅10
-4
1⋅10
-3
1⋅10
-2
1⋅10
-1
1⋅10
0
1⋅10
1
CPU time (s)
width
10
17
21
32
34
36
0.001
0.01
0.1
1⋅10
-16
1⋅10
-15
1⋅10
-14
1⋅10
-13
CPU time (s)
width
10
17
21
32
34
36
0.01
0.1
1
1⋅10
-14
1⋅10
-13
1⋅10
-12
1⋅10
-11
1⋅10
-10
CPU time (s)
width
10
17
21
32
34
36
0.01
0.1
1
10
1⋅10
-4
1⋅10
-3
1⋅10
-2
1⋅10
-1
1⋅10
0
1⋅10
1
CPU time (s)
width
11
29
31
38
40
42
0.001
0.01
0.1
1
1⋅10
-15
1⋅10
-14
1⋅10
-13
CPU time (s)
width
11
29
31
38
40
42
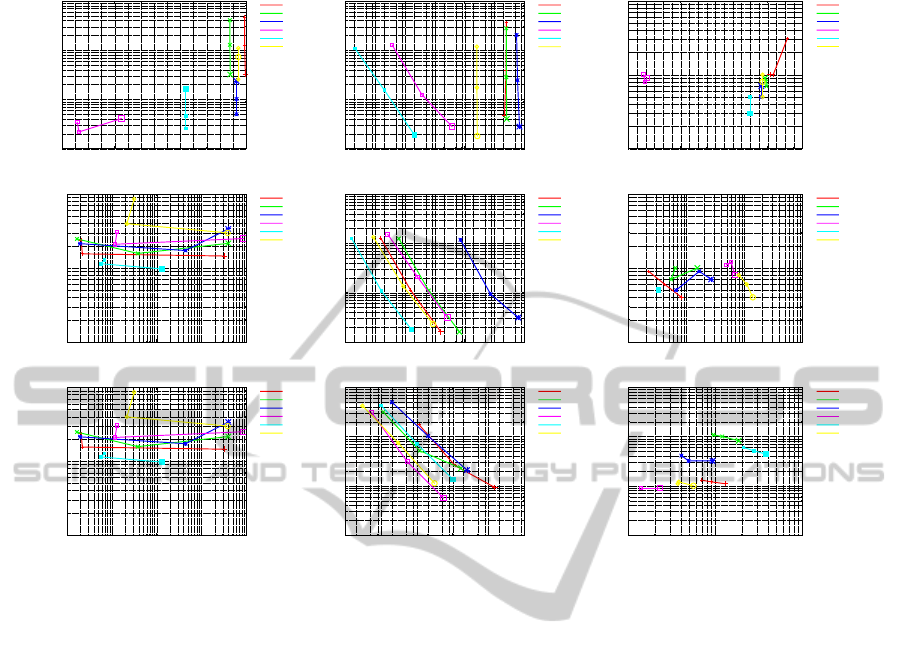
Figure 1: WPDs for three solvers and three classes of nonlinear problems: simple with uncertainty (top), simple without
uncertainty (middle), moderate without uncertainty (bottom). Bigger symbols tag results obtained with the first parameter set.
to solve a certain task. Users have to make deci-
sions about what program is the best for their prob-
lem. This choice is not simple since modern tools
have many settings with which they can be finely
tuned. However, the tuning usually requires some in-
depth knowledge of underlying algorithms, for learn-
ing which an average user might have no time.
For example, a long-term involvement of out
working group with verified modeling and simulation
of dynamic systems revealed the need for compari-
son of verified initial value problem solvers. During
the last decades, a number of programs have been de-
veloped for this purpose such as VNODE-LP, RIOT,
VALENCIA-IVP and others. The goal of such soft-
ware is to provide as tight enclosures as possible over
a sufficiently long time span. Whether they succeed
depends on different factors, for example, the type of
the problem or the presence of explicitly uncertain pa-
rameters. Despite successful attempts at using them
in practice, a typical engineer is not interested in them
since their naive use often leads to too pessimistic re-
sults due to overestimation.Therefore, (preferably au-
tomatic) comparisons between tools are necessary so
that users can choose the right one easily.
In (Auer and Rauh, 2012), we introduced an on-
line framework for comparisons between verified ini-
tial value problem solvers. The conceptual basis is de-
rived from the previous work on floating-point based
solvers (Hull et al., 1972), (Mazzia and Iavernaro,
2003). However, verified solvers have to be compared
differently. For example, since they always produce
correct results, we do not need to access the number of
incorrect solutions. On the other hand, the criterium
of computing time gains in importance because ver-
ified solvers are in general slower than usual ones.
To save user’s time, we developed a recommender
front-end (online soon) which suggests a solver and
its appropriate settings for a given initial value prob-
lem without the need to test all the available solvers
and settings with it. The recommendation is based on
the similarity of the user’s problem to one from our
database for which full test results are available. The
similarity is established semi-automatically using the
problem classification described in detail in (Auer and
Rauh, 2012). In this way, we contribute to the soft-
ware quality analysis and user support at the verifica-
tion stage of the V&V cycle (dynamic simulations).
Such comparisons and guidance are not possible
without a representative set of examples. In (Auer
and Rauh, 2012), we worked with a small database of
Process-orientedApproachtoVerificationinEngineering
517

12 systems which represented the following classes
of non-stiff problems: linear/nonlinear, in each of
them simple/moderate/complex, in each of them
with/without uncertainty. This classification makes
sense since there exist theoretical results about dif-
ferences in performance of solvers for linear and non-
linear problems. The presence of uncertainty and the
dimension of the problem (which is one of the fac-
tors defining the numeric complexity) seem to play
an important role. These claims can be corroborated
empirically if the problem database is big enough.
As of now, there are over 45 examples in our
database, mainly simple and moderate systems in
both linear and nonlinear classes. In Figure 1, we
show work-precision diagrams (WPD) for three avail-
able solvers (RIOT on the left, VALENCIA-IVP in
the middle, VNODE-LP on the right) and three sets
of parameters for each. We tested the solvers on all
nonlinear problems from the classes simple/with un-
certainty (top), simple/without uncertainty (middle),
moderate/without uncertainty (bottom). For more
information about the used problems (given by the
number in the figure) and the conditions of the test,
visit
vericomp.inf.uni-due.de
. The parameter
sets we vary for the three tools are different in their
nature. Therefore, the CPU time always increases
from parameter set one to parameter set three for
VALENCIA-IVP (the only solver without an auto-
matic step size control) since we decrease the step-
size, which is not always true for the other two solvers
where we modify the order of the Taylor expansion.
From the figure, we observe that all three solvers
perform differently for problems with and without un-
certainty (the top and middle WPDs). Whereas VN-
ODE is best with respect to CPU times in both cases,
it produces considerably less tight enclosures than
RIOT for uncertain problems. For the same exam-
ples without uncertainty, the quality of enclosures of
these two solvers is almost equal. There is also a dif-
ference between the classes of simple and moderate
problems: for example, RIOT with the third set of
settings is mostly better with respect to the enclosure
width for the bottom figure, which does not hold for
the middle one. The figures show that each class gen-
erates a distinct solver behavior, giving us a basis for
employing the classification as the similarity measure
while recommending a solver for a specific example.
4 CONCLUSIONS
We presented process-oriented guidelines for verifi-
cation of biomechanical problems. In the scope of
software quality analysis, we described an online sys-
tem for comparison of verified initial value problem
solvers. This provides broader user support in the
area of numerical verification with (extended) interval
methods, helping to raise awareness of verified tools
in engineering.
REFERENCES
AIAA (1998). Guide for the Verification and Validation of
Computational Fluid Dynamics Simulations. Ameri-
can Institute of Aeronautics and Astronautics.
ASME (2006). Guide for Verification and Validation in
Computational Solid Mechanics. American Society of
Mechanical Engineers, pages 1–15.
Auer, E., Chuev, A., Cuypers, R., Kiel, S., and Luther, W.
(2011). Relevance of Accurate and Verified Numerical
Algorithms for Verification and Validation in Biome-
chanics. In EUROMECH Colloquium 511, Ponta Del-
gada, Azores, Portugal.
Auer, E. and Luther, W. (2009). Numerical Verification As-
sessment in Computational Biomechanics. In Proc. of
Dagstuhl Seminar 08021, LNCS, pages 145–160.
Auer, E., Luther, W., and Cuypers, R. (2012). Process-
Oriented Verification in Biomechanics: A Case Study.
In Proc. of SUM 2012, Marburg, Germany. Submitted.
Auer, E. and Rauh, A. (2012). VERICOMP: A System to
Compare and Assess Verified IVP Solvers. Comput-
ing, 94(2):163–172.
Berz, M. (1995). Modern Map Methods for Charged Par-
ticle Optics. Nuclear Instruments and Methods A363,
pages 100–104.
de Figueiredo, L. H. and Stolfi, J. (2004). Affine Arith-
metic: Concepts and Applications. Numerical Algo-
rithms, 34(1-4):147–158.
Ferson, S., Kreinovich, V., Ginzburg, L., Myers, D. S.,
and Sentz, K. (2003). Constructing Probability Boxes
and Dempster-Shafer Structures. Technical Report
SAND2002-4015, Sandia National Laboratories.
Henninger, H. and Reese, S. (2010). Validation of Compu-
tational Models in Biomechanics. In Proc. of the In-
stitution of Mechanical Engineers, volume 224, pages
801–812.
Hull, T. E., Enright, W. H., Fellen, B. M., and Sedgwick,
A. E. (1972). Comparing Numerical Methods for Or-
dinary Differential Equations. SIAM Journal on Nu-
merical Analysis, 9(4):603–637.
Mazzia, F. and Iavernaro, F. (2003). Test Set for Initial
Value Problem Solvers. Technical Report 40, Depart-
ment of Mathematics, University of Bari, Italy.
Moore, R. E., Kearfott, R. B., and Cloud, M. J. (2009). In-
troduction to Interval Analysis. Society for Industrial
and Applied Mathematics, Philadelphia.
Oberkampf, W. and Trucano, T. (2007). Verification and
Validation Benchmarks. Nuclear Engineering and
Design, 238(3):716–743.
Schlesinger, S. (1979). Terminology for Model Credibility.
Simulation, 32(3):103–104.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
518
