
LGMD based Neural Network for Automatic Collision Detection
Ana Silva, Jorge Silva and Cristina Santos
Industrial Electronic department, University of Minho, Campus of Azurem, Guimarães, Portugal
Keywords: Bio-inspired Model, Lobula Giant Movement Detector Neuron, Artificial Neural Networks, Collision
Avoidance.
Abstract: Real-time collision detection in dynamic scenarios is a hard task if the algorithms used are based on
conventional techniques of computer vision, since these are computationally complex and, consequently,
time-consuming. On the other hand, bio-inspired visual sensors are suitable candidates for mobile robot
navigation in unknown environments, due to their computational simplicity. The Lobula Giant Movement
Detector (LGMD) neuron, located in the locust optic lobe, responds selectively to approaching objects. This
neuron has been used to develop bio-inspired neural networks for collision avoidance. In this work, we
propose a new LGMD model based on two previous models, in order to improve over them by
incorporating other algorithms. To assess the real-time properties of the proposed model, it was applied to a
real robot. Results shown that the LGMD neuron model can robustly support collision avoidance in
complex visual scenarios.
1 INTRODUCTION
Many animals extract salient information from
complex, dynamic visual scenes to drive behaviours
necessary for survival. Insects are particularly
challenging for robotic systems: they achieve their
performance with a nervous system that has less
than a million neurons and weighs only about 0.1
mg. By this reason, some of these insects provide
ideal biological models that can be emulated in
artificial systems. These models have the potential to
reproduce complex behaviours with low
computational overhead by using visual information
to detect imminent collisions caused either by a
rapidly approaching object or self-motion towards
an obstacle.
In locusts, the Lobula Giant Movement Detector
(LGMD) is a bilaterally paired motion sensitive
neuron that integrates inputs from the visual system,
responding robustly to images of objects
approaching on a collision course (Gray, John R , et
al., 2001) (Rind, 1987) (Gabbiani, et al., 1999)
(Gray, et al., 2010). This neuron is responsible for
triggering escape and collision avoidance behaviours
in locusts. The first physiological and anatomical
bio-inspired model for the LGMD neuron was
developed by Bramwell in (Rind and Bramwell,
1996). The model continued to evolve (Blanchard, et
al., 2000) (Yue and Rind, 2006) (Stafford, et al.,
2007) (Meng, et al., 2010) and it was used in mobile
robots and deployed in automobiles for collision
detection. These connectionist models have shown
that the integration of on and off channels and feed-
forward inhibition can account for aspects of the
LGMD neuron looming sensitivity and selectivity
when stimulated with approaching, translating and
receding objects.
However, further work is needed to develop
more robust models that can account for complex
aspects of visual motion (Guest and Gray, 2006). In
this article, we are interested in understanding the
LGMD models previously proposed by (Yue and
Rind, 2006) as well as the achieved properties of the
model described at (Meng, et al., 2010). Thereby, we
are interested in integrate the two previous LGMD
models, (Yue and Rind, 2006) and (Meng, et al.,
2010), in order to take the advantage of noise
immunity proposed in (Yue and Rind, 2006) and
direction sensitivity proposed in (Meng, et al.,
2010).
In a previous study, we implemented the models
from (Yue and Rind, 2006) and (Meng, et al., 2010)
and submitted them to relevant simulated visual data
sets. This step enabled us to understand some of the
literature models limitations in relation to obstacle
detection and avoidance.
132
Silva A., Silva J. and Santos C..
LGMD based Neural Network for Automatic Collision Detection.
DOI: 10.5220/0004044201320140
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 132-140
ISBN: 978-989-8565-22-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

With this knowledge, we propose a new model
to cope with the limitations showed by the models
implemented ((Yue and Rind, 2006) and (Meng, et
al., 2010)). The proposed model was validated over
a set of different visual scenarios. In order to the
LGMD network be used as a robust collision
detector for real robotic applications, and based on
(Yue and Rind, 2006), it was proposed a mechanism
to enhance the features of colliding objects. The
model from (Yue and Rind, 2006) favours grouped
excitation, which normally indicates the presence of
an obstacle, and ignores isolated excitation, which
can be the result of noise present in the captured
image, with selective passing coefficients. The
model (Yue and Rind, 2006) has the capability to
filter out the isolated excitations through the
excitation gathering mechanism, allowing that only
parts of the captured image with bigger excitatory
spatial areas can contribute to the excitation of the
LGMD cell. Besides this extraordinary capability of
noise reduction, when computationally
implemented, the neural network based on (Yue and
Rind, 2006) generated false collision alarms when
stimulated with receding objects. Based on (Meng,
et al., 2010), we have modified the LGMD model, so
that it could distinguish approaching from receding
movements.
On the other side, the LGMD model proposed by
(Meng, et al., 2010) is not immune to the presence of
noise levels in the captured image, which can leads
it to produce false collision alerts in the presence of
noise. However, as it was said before, this model is
able to detect the direction of movement in depth.
Taking the advantages of each model (Yue and
Rind, 2006) (Meng, et al., 2010), we decided to
propose a new LGMD model that is more robust in
collision detection. The model here proposed was
tested on simulated and non-simulated environments
and, through the obtained results, it can be
concluded that it works very efficiently in both
scenarios. In relation to the real performance of the
proposed method, a collision avoidance is judge by
the evaluation of a real robot moving around in a
real environment and avoiding real obstacles (of
different shapes, sizes and colours) and processing
captured images (containing real noise, blur,
reflections, etc). In our perspective, the new
proposed method increases the precision of obstacle
detection, in a way that this model is robust to the
presence/absence of high noise levels in the captured
image, as well as is able to detect the movement
direction of the visual stimulus. Besides that, when
tested in a real environment, the results were very
satisfactory. For a better understanding of the work
developed, the paper was organized in the following
way: in section 2, we make a detailed description of
the proposed LGMD neural network model. In
section 3 are presented some experimental results on
simulated and recorded video data. In this section we
also present the experiments carried out with a robot
DRK8000 to test the stability of this model in
relation to collision detection in real scenarios.
Finally, in section 4 we make the conclusions of the
work here described.
2 THE PROPOSED NEURAL
NETWORK MODEL FOR
LGMD
The biological inspired neural network here
proposed is based on previous models described on
(Blanchard, et al., 2000) (Yue and Rind, 2006)
(Stafford, et al., 2007) (Meng, et al., 2010). The
modified neural network is shown on Figure 1.
Figure 1: Schematic illustration of the proposed LGMD
model. There are five groups of cells and five single cells:
P layer: photoreceptor cells; E layer: excitatory cells; I
layer: inhibitory cells; S layer: summing cells; NR layer:
noise-reduction cells; A cell: approaching cell; R cell:
receding cell; D cell: direction cell; FFI cell: feed-forward
inhibition cell. LGMD cell: represents the LGMD
biological neuron.
The LGMD neural network here proposed is
composed by five groups of cells: photoreceptor
cells (P layer), excitatory cells (E layer), inhibitory
cells (I layer), summing cells (S layer) and noise
LGMDbasedNeuralNetworkforAutomaticCollisionDetection
133

reduction cells (NR layer). Besides that, it is
composed by five single cells: the direction sensitive
system, composed by the approaching cell (A cell),
the receding cell (R cell) and the direction cell (D
cell), the feed-forward inhibition cell (FFI cell) and
the LGMD cell.
A grayscale image of the camera current field of
view, represented has a matrix of values (from 0 to
255), is the input to a matrix of photoreceptor units
(P layer). This layer calculates the absolute
difference between the luminance of the current and
the previous input image, mathematical represented
by the following equation:
(
,
)
=
(
,
)
−
(
,
)
(1)
Where P
f
is the output of the P layer at frame f,
L
f
and L
f-1
are the captured luminance at frames f and
f-1, respectively. The output of the P layer is the
input of two layers: the excitatory (E) and the
inhibitory (I) layers. To the excitatory cells of the E
layer, the excitation that comes from the P layer is
passed directly to the retinotopic counterpart. The
inhibition layer (or I layer) receives the output of the
P layer and applies a blur effect on it, using:
(
,
)
=
1
9
δ
(
x+i,
y
+j
)
(2)
δ
(
x,
y
)
=
(
,
)
(3)
Where I
f
is the output of the I layer at frame f,
and P
f-1
is the output of the P layer at frames f-1.
Then, the output of the I layer passes to the summing
layer, in a retinotopic mode.
The summing layer (or S layer) receives the
output from the E and I layers and performs the
followin operation:
(
,
)
=
(
,
)
−I
∙
(
,
)
,
(
,
)
=
(
,
)
and
(
,
)
≥0
(4)
Where P
f
is the output of the P layer at frame f, I
f
the output of the I layer at frame f and I
str
(a scalar,
set to be 0.35) represents the inhibition strength.
Based on (Yue and Rind, 2006), it was added a
new mechanism for the LGMD neural network to
filter the background noise. This mechanism,
implemented in the NR layer, takes clusters of
excitation in the S units to calculate the input to the
LGMD membrane potential. These clusters provide
higher individual inputs then the ones of isolated S
units. The excitation that comes from the S layer is
then multiplied by a passing coefficient Ce
f
, which
value depends on the surrounding neighbours of
each pixel, calculated as follows:
(
,
)
=
1
9
δ
(
x+i,
y
+j
)
(5)
δ
(
x,
y
)
=
(
,
)
(6)
The final excitation level of each cell in the NR
layer, at frame f (NR
f
), is given by:
(
,
)
=
(
,
)
∙
(
,
)
∙w
(7)
w=∆c+max
(
[
]
)
∙C
(8)
Cw is set to 4, and Δc is a small number (0.01),
to prevent w from being zero, and max (|[Ce]
f
|) is the
largest element in matrix |[Ce]
f
|.
Within the NR layer, a threshold filters the
decayed excitations (isolated excitations), as:
(
,
)
=
(
,
)
,
(
,
)
∙
≥
0,
(
,
)
∙
<
(9)
Where C
de
∈ [0, 1] is the decay coefficient and
T
de
is the decay threshold (set to 20). The decay
threshold here used was experimentally determined.
The NR layer is able to filter out the background
detail that may cause excitation. Hence, only the
main object in the captured scene will cause
excitation.
The LGMD potential membrane K
f
, at frame f, is
summed after the NR layer, as described in the
following equation:
=
=(
(
,
)
)
(10)
Where n is the number of rows and m is the
number of columns of the matrix representing the
captured image.
The A and R cells (adapted from (Meng, et al.,
2010)) are two grouping cells for depth movement
direction recognition. The A cell holds the mean of
three samples of the LGMD cell:
=
(
+
+
)
3
(11)
The R cell shares the same structure as the A cell
but with a temporal difference, having one frame
delay from A.
=
(12)
Analyzing the equations above described, it can
be concluded that if the object is approaching A
f
> R
f
and if the object is receding, R
f
> A
f
.
The D cell is used to calculate the direction of
movement. This can be represented by the following
equation:
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
134

=(
)−(
)
(13)
This cell exploits the movement direction in
depth. It is based on the fact that a looming object
(approaching) gets larger whereas a receding object
gets smaller. In a way to distinguish the movement
direction detected by the D cell, it was added a
threshold mechanism, T
D
(set to
0.05×n×m), where n is the number of rows and m is
the number of columns of the captured image),
which was experimentally determined.
=
1,
≥
0,
>
>−
−1,
≤−
(14)
The LGMD membrane potential K
f
is then
transformed to a spiking output using a sigmoid
transformation,
=(1+
)
(15)
Where n
cell
is the total number of cells in the NR
layer and k
f
∈ [0.5, 1]. The collision alarm is decided
by the spiking of the LGMD cell.
However, the spiking output k
f
(from equation
(15), representative of the LGMD cell output) is not
the final output of the neural network. It was
implemented a spiking mechanism using an
adaptable threshold. This threshold starts with a
value experimentally determined, T
s
(0.88) and it is
updated at each frame, through the following
process,
Where [T
l
, T
u
] defines the lower and upper limits
for adaptation (T
l
is 0.180 and T
u
is 0.90) , Δt is the
increasing step (0.01), ℿ (0.72) is a threshold that
limits the averaged spiking output s
av
,between frame
f-n to frame f-k (n is 5 and k is 2),
=
1
−+1
(17)
If the sigmoid membrane potential k
f
exceeds the
thresholdT
s
a spike is produced, as follows:
=
1,
≥
0,ℎ
(18)
Finally, a collision is detected when there are n
sp
spikes in n
ts
time steps (n
sp
≤ n
ts
), where n
sp
is 4 for
the simulated experiments and 3 to real experiments
(since captured images in real experiments present
higher variations) and n
ts
is 5 for all the experiments
(values experimentally determined).
=
1,
≥
0,ℎ
(19)
The robot escape behavior is initialized when a
collision is detected. Additionally, the spikes can be
suppressed by the FFI cell when occurs an intense
field movement. When the robot is turning, sudden
changes in the visual scenario occur which can lead
the network to produce spikes and even false
collision alerts.
The feed-forward inhibition cell (FFI cell) is
very similar to the LGMD cell but the FFI cell
receives the output from the P layer (and not from
the NR layer), being represented by:
=
∑∑
(
,
)
(20)
Where FFI
f
is the output of the FFI cell at frame
f and P
f-1
is the output of the P layer at frame f-1. If
FFI
f
exceeds a threshold T
FFI
, the spikes produced
by the LGMD cell are inhibited. The threshold T
FFI
was experimentally determined (set to 25).
As described in this section, the proposed neural
network for the LGMD neuron only involves low
level image processing. So, the proposed neural
network model is able to work in real time and,
besides that, is independent of object classification.
3 EXPERIMENTAL RESULTS ON
THE PROPOSED MODEL
In a way to test the efficiency of the LGMD neural
network here proposed, two different data sets were
used. The first experiment was made on a simulated
data set and, after that, it was used a recorded video
to prove the capacity of the LGMD neural network
here proposed to work in a real environment. In the
second experiment, we implemented the LGMD
neural network in a real robot, DRK8000, located
within a real arena. All the parameters were kept the
same during all the experiments.
3.1 Simulated Environment
We develop a simulation environment in Matlab
(MATLAB, 2011) that enables us to assess the
effectiveness of the proposed LGMD neural
=
+∆,
>ℿ
(
+∆
)
∈[
,
]
−∆,
<ℿ
(
−∆
)
∈[
,
]
,ℎ
(16)
LGMDbasedNeuralNetworkforAutomaticCollisionDetection
135

network. Objects were simulated according to their
movement and the corresponding data was acquired
by a simulated camera and processed by the LGMD
neural network. Image sequences were generated by
a simulated camera with a field of view of 60º in
both x and y axis and a sampling frequency of 100
Hz. The simulated environment enabled us to adjust
several parameters, such as: image matrix
dimensions, the camera rate of acquisition, the
image noise level, the object shape, the object
texture, as well as other parameters.
The computer used in the experiments here
described was a Laptop (Toshiba Portegé R830-
10R) with 4 GHz CPUs and Windows 7 operating
system. Relative to the parameters used by the
LGMD neural network, they were determined before
the experiments.
3.2 Results on Simulated Data Set and
on Real Recorded Data
Previous to the stimulation of the LGMD model here
proposed, several experiments have been made in
order to verify and analyse how the image of a black
squared object grows when it is approaching to a
simulated camera. For that, we used synthesized
black (0) and white (255) images, with 100
(horizontal) by 100 (vertical) pixels of resolution.
The object being observed was a square black filled
rectangle (figure 2), whose properties as acquisition
frequency, velocity, trajectory, shape, texture, noise
level or object size could be changed.
The obtained results enabled us to conclude that
the image growing depends on several factors,
including the camera acquisition frequency and the
object velocity, among other characteristics.
However, the curve that approximates this growing
is always an exponential curve, whose slope depends
on these aforementioned factors.
As a second step, and in the context of this study,
we made an exhaustive analysis of the response of
our LGMD model to a set of standard LGMD
stimulation protocols, which allowed us to validate
our model with respect to the biological system
(Gabbiani, et al., 2001). In our first experiment we
evaluated the proposed LGMD model, by using a
looming stimulus consisting of a solid square with
10 repetitions to each size/velocity=l/|v| pair (where
l stands for the half length of the square object and v
for its linear velocity). With these experiments, we
wanted to prove that our model respects the
properties verified by Gabbiani et al. (Gabbiani, et
al., 1999) (Gabbiani, et al., 2001) as well as by
Badia (Badia, et al., 2010). These properties,
founded in the locust visual system, include a linear
relation between the time of the peak firing rate of
the LGMD neuron and the ratio that correlated the
stimulus object size (l) and the stimulus linear
velocity (v) (Gabbiani, et al., 2002).
As a first step, we analysed the LGMD model
here proposed using, for that, a looming stimulus in
the form of a black square. We repeated this
procedure to ten different l/|v| ratios, from 5 to 95
milliseconds. Through the obtained results it was
observed that the fit of the TTC (time-to-collision)
of the peak firing rate, obtained through the LGMD
neural network, versus the l/|v| ratios, is consistent
with the biological results, showing a correlation
coefficient (r) superior to 0.99.
In literature, it was also reported that the LGMD
neuron responses are largely independent of the
stimulus texture, shape and approaching angle
(Badia, et al., 2010) (Gabbiani, et al., 2001). The
results obtained when we subjected our model to
stimulus with different textures, different shapes and
different approaching angles (as shown on Figure 2)
to different l/|v| ratios (also from 5 to 95ms) showed
us that the proposed model still has a linear
relationship between the TTC of the peak firing rate
versus the l/|v| ratios, not being affected by the
change on the stimulus characteristics, as reported
for the biological system.
Figure 2: Artificial visual stimuli, developed in Matlab
(MATLAB, 2011).
In the first experiment made, to test the LGMD
model invariance to textured objects, the correlation
coefficient between the LGMD model responses and
the regression line was bigger than 0.99 (r>0.99),
meaning that the LGMD model is not sensitive to
the texture of the objects. Relatively to the second
experiment, which allowed us to test the LGMD
model invariance to object shape, the correlation
coefficient between the model responses and the
regression line was 0.97, approximately (r=0.9734).
And, for the last one, in order to test the LGMD
model invariance to different approaching angles of
the looming stimulus, we aligned the camera at
different angular orientations relatively to the
projection screen. After the analysis of the obtained
results we could conclude that, as the camera angle
deviates from the center (0º), the correlation
coefficient decays (for a camera angle of 33º of
deviation, r=0.995; for a camera angle of 55º of
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
136
deviation, r=0.9192 and, finally, for a camera angle
of 75º of deviation, r=0.874). Through this
validation, we could conclude that the LGMD model
here proposed respects the biological principles.
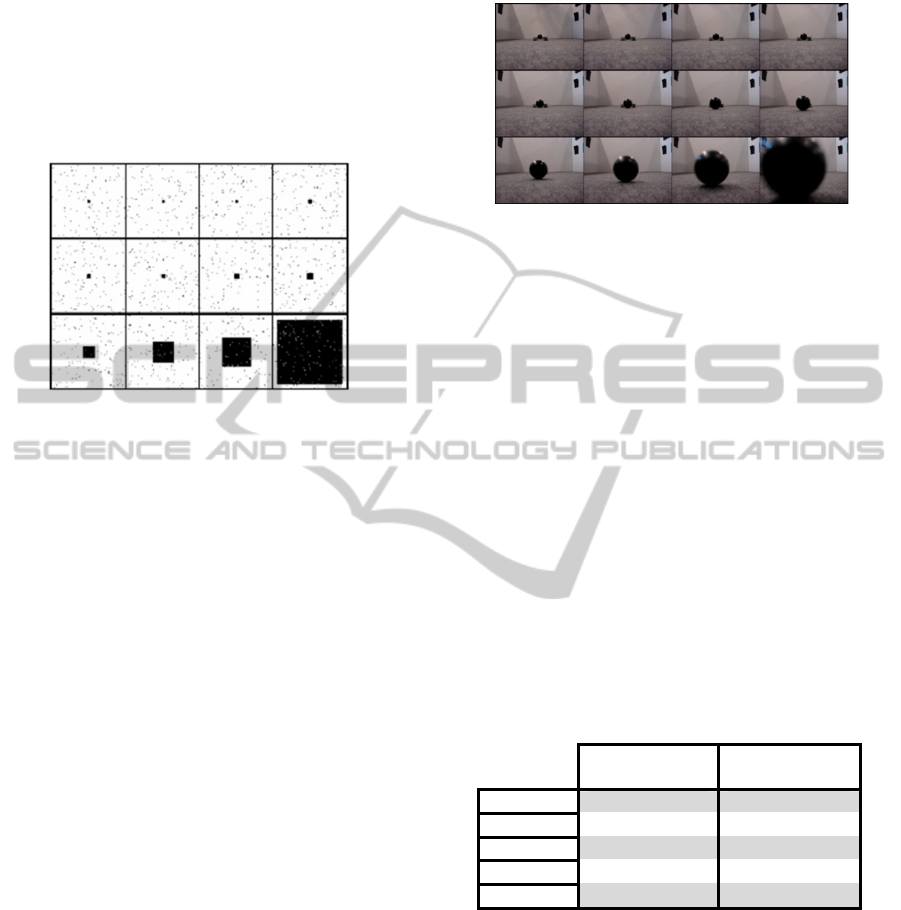
After the model validation, we fed the LGMD
neural networks proposed by (Yue and Rind, 2006)
(Meng, et al., 2010) and the one proposed by us,
with simulated image sequences (a representation
can be seen on Figure
3).
Figure 3: Selected frames from the simulated image
sequence. The square object changes its size from small
(10 by 10cm, l=5cm) to big, and moves at 100 cm/s
(v=100cm/s). The relation l/|v| is 50 milliseconds. The
noise level in all the image sequence is, approximately,
500 pixels. The frame rate was 100 Hz.
In this point, we used four different simulated visual
stimuli:
Stimulus 1: composed by a black approaching
square, over a white background, with l/|v| equal to
50 milliseconds, acquired with a frame rate of 100
Hz, without noise added to the image sequence.
Stimulus 2: composed by a black receding
square, over a white background, with l/|v| equal to
50 milliseconds, acquired with a frame rate of 100
Hz, without noise added to the image sequence.
Stimulus 3: composed by a black approaching
square, over a white background, with l/|v| equal to
50 milliseconds, acquired with a frame rate of 100
Hz, with 500 pixels of noise added to the image
sequence.
Stimulus 4: composed by a black receding
square, over a white background, with l/|v| equal to
50 milliseconds, acquired with a frame rate of 100
Hz, with 500 pixels of noise added to the image
sequence.
In addition to these four simulated visual stimuli,
and in order to test the LGMD models in a real
environment, we recorded a real video sequence,
using a Sony Cyber shot digital camera 7.2
megapixels to obtain the video clip. The resolution
of the video images was 640 by 480 pixels, with an
acquisition frequency of 30 frames per second. In
Figure 4 it is represented some selected frames
captured by the camera, showing a real approaching
black ball.
Figure 4: Selected frames from the recorded image
sequence used in the experiment. The recorded video is
composed by 44 frames, showing a black approaching
ball.
After the computational implementation of the
LGMD models proposed in (Yue and Rind, 2006)
and (Meng, et al., 2010), and after subject those to
all the stimuli previously described, we verify that
the collisions were detected, by the different LGMD
models, at different time instants and, consequently,
at different distances of the object (simulated or real)
relatively to the camera. For a better understanding
and organization of the results, we decided to call
“LGMD model 1” to the model proposed by (Yue
and Rind, 2006) and “LGMD model 2” to the model
proposed by (Meng, et al., 2010).
The results obtained are resumed in the
following table.
Table 1: Distances at which collision detection alarms
were generated by the LGMD model 1 and LGMD model
2, in five different situations tested.
LGMD model 1 LGMD model 2
Stimulus 1 26 cm 14 cm
Stimulus 2 35 cm --
Stimulus 3 26 cm 20 cm
Stimulus 4 35 cm 11 cm
Real video 24 cm 14 cm
As we can observe on Table 1, in the
approaching situations (stimulus 1, 3 and real video),
the LGMD model 1 detected a collision when the
object was located at, approximately, 24-26 cm
relatively to the camera. This model showed its
immunity to the noise presence since it detected a
collision exactly at the same distance when
stimulated with stimulus 1(absence of noise) and 3
(presence of high noise levels). However, if we
observe the obtained results for the LGMD model 1
when stimulated with receding objects (stimulus 2
and 4) it detected a false collision when the object
LGMDbasedNeuralNetworkforAutomaticCollisionDetection
137

was located at 35 cm relatively to the camera, in
both situations tested. Through these last results one
can conclude that the LGMD model 1 is not able to
distinguish between approaching and receding
objects, generating false collision alerts in the
presence of receding objects. But we can also
conclude that this model has high immunity to the
noise presence in the captured images.
Relatively to the LGMD model 2 and observing
Table 1, for the stimulus 1 and 3, this model did not
detect collisions for the same distance. When
stimulated with stimulus 1, it detected a collision
when the object was located at 14 cm relatively to
the camera and when stimulated with stimulus 3, a
collision was detected sooner, when the object was
at 20 cm relatively to the camera. This happened due
to the fact that the LGMD model 2 is not immune to
the noise presence and the noise pixels, which were
not eliminated by this model, composed an extra
excitation to the LGMD neural network.
In the presence of a receding object, the LGMD
model 2 was able to not produce false collision alerts
when stimulated with stimulus 2. However, when we
feed the LGMD model 2 with the stimulus 4, it
detected a false collision when the object was
located at 11 cm relatively to the camera. This
happened also due to the non-immunity of the
LGMD model 2 to the noise presence, which works
as an extra excitation, leading to the generation of
false collision alerts.
After this analysis, relative to the behaviour of
the LGMD model 1 and LGMD model 2 in different
situations, we could extract some particular
characteristics of both models. These results leaded
us to produce a mixed LGMD model, combining the
advantages of the LGMD model 1 and LGMD
model 2. Thus, the LGMD model here proposed
provides noise immunity, as well as a directionally
sensitive system.
Figure 5 shows the output from the LGMD
model here proposed. In this figure, at each time step
we can observe the result of different mathematical
processing (described on section 2), corresponding
to the layers of the proposed model, executed
sequentially, necessary to detect, with the maximum
precision, an imminent collision.
The analysis of these results showed, on Figure
5, that the LGMD neural network detected a
collision at time -0.19 seconds, i.e., when the object
was located at 19 cm relatively to the camera.
In relation to the receding object, represented on
Figure 6, as expected no collisions were detected.
The results previously described showed the
efficacy of the LGMD neural network proposed by
Figure 5: LGMD model response to an approaching object
which l/|v| set at 50 milliseconds. Spike Rate: blue graph:
is obtained by the ratio of the A cell value and the total
number of cells in the NR layer. Green graph: is obtained
by the ratio of the R cell value and the total number of
cells in the NR layer. D cell: output of the direction cell: 1:
approaching, 0: no significant movement, -1: receding. Ts:
adaptative threshold represented by the red line; the gray
points represent the s
av
output. LGMD: Blue graph: output
of the LGMD cell (mathematically represented by the k
f
value). Green points: output of the LGMD cell after the
Feed-forward inhibition. LGMD after T
s
: represents the
output of the LGMD cell after the application of the
threshold T
s
and being in account the output of the D cell.
Collision detected: the output of this graph is one when it
is detected four successive spikes in five successive time-
steps. In all these graphs, the zero value corresponds to the
time of collision.
Figure 6: LGMD model response to a receding object
which l/|v| was equal to 50 milliseconds. The legend of
this figure is similar to the one described on the figure 5.
us. On Figure 5 and Figure 6, it is shown the LGMD
model immunity to high noise levels, as well as the
capability of this model in distinguish the direction
of movement between successive frames. Then, to
test the capability of the proposed LGMD model in a
more realistic environment, we subjected it to the
real video sequence, represented on Figure 4. In this
situation, the model produced a collision alert when
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
138

the object was located at 28 cm relatively to the
camera.
3.3 Results on a Real Robot
In order to assess the capability of the LGMD model
here proposed in a real environment, we used a
DRK8000 mobile robot, with a 8-bit CIF (352 by
288 pixels) colour CMOS camera, working at 10Hz,
having a field-of-view of 70 degrees, approximately.
The robot was located within an arena, surrounded
by four walls with attached objects with different
colours, shapes, textures and sizes. The arena has 16
m
2
. We used the dead reckoning process in order to
predict the position of the robot at each time instant.
Figure 7: Integrated simulation processes used in the real
experiment.
As Figure 7 shows, the simulation system used
comprises four processes: The LGMD model
module, the robot control module, the tracking
module and the graphical user interface. The
experiment ran in real-world time, with 10 time
steps per second. The LGMD model module was
composed by the different layers observed on Figure
1, and the final output of this model comprises two
different states: “collision detected” or “non-
collision detected”.
The second module, the robot control module,
consists in the reactive control structure, capable of
controlling the robot, using only the output of the
LGMD model module. The behaviours comprised
by this module, can be divided in two: 1- basic
exploratory activity; 2- collision avoidance of
obstacles, triggered by the response of the LGMD
module. If the robot detects an imminent collision, it
stops, rotates and, then, continues the movement in a
straight line. The turning speed is 1/3 of the robot
speed for the left wheel and -1/3 of the robot speed
to the right wheel. The robot was set to rotate during
1 second. Finally, in relation to the tracking process,
we used dead reckoning in order to determine the
position of the robot at each time step and, then, use
this information to infer about the distance at which
the robot deviates of a potential collision/obstacle.
In the experiment, three long robot movement
periods (120 seconds, speed at 5, 10 and 15 cm/s)
were conducted to test and show the mechanism of
the collision detector in a real environment.
After the experiment, and through the analysis of
the dead reckoning relative to the robot movement
during all the running time, we could extract, as well
as characterize, the collision detections. Collision
detections between 20cm and 100cm away from the
wall were classified as correct, those detected closer
than 20cm from the wall were classified as missed,
and collisions detected at a distance over 100cm as
false positives (see Figure 8).
Figure 8: Top graph: LGMD model output, running at real
time, for different LGMD layers, during the experiment
with the DRK8000 robot, for a robot speed of 5 cm/s.
Midle graph: Dead reckoning of the robot during the
initial time steps of the experiment, for a robot speed of 5
cm/s. Categorization of the collision detections as missed,
correct and false positives, for three different robot
velocities tested: 5, 10 and 15 cm/s.
As represented on Figure 8, as the velocity of the
robot increases, the percentage of collision
detections classified as correct decreases, as well as
the percentage of missed and false positives
detections increases. The increase of missed
collisions to higher speeds was due to the simple
collision avoidance mechanism adopted in this
article: the robot always turns to the same side
LGMDbasedNeuralNetworkforAutomaticCollisionDetection
139

regardless the relative position of the nearby objects.
The increase in the number of false positives to
higher velocities is based on the fact that, at higher
velocities, the difference between successive frames
is higher, leading to the production of high
excitation levels and, consequently, a bigger number
of collision detection alarms.
Although the difference verified in relation to
correct collision detections between different
velocities, the results obtained are very satisfactory, as
the number of correct detections are always higher
than the sum of missed and false positive detections.
4 CONCLUSIONS
In this paper, we propose a modified LGMD model
based on the identified LGMD neuron of the locust
brain. The model proved to be a robust collision
detector for autonomous robots. This model has a
mechanism that favours grouped excitation, as well as
two cells with a particular behaviour that provide
additional information on the depth direction of
movement.
For applications as collision detectors in
robotics, the model proposed is able to remove the
noise captured by the camera, as well as enhance its
ability to recognize the direction of the object
movement and, by this way, remove the false
collision alarms produced by the previous models
when a nearby object is moving away.
Experiments with a DRK8000 robot showed that
with these two new
procedures, the robot was able to
travel autonomously in real time and within a real
arena.
The results illustrate the benefits of the LGMD
based neural network here proposed, and, in the
future, we will continue to use and enhance this
approach, using, for that, a combination of
physiological and anatomical studies of the locust
visual system, in order to improve our understanding
about the relation between the LGMD neuron output
and the locust muscles related to the avoidance
manoeuvres.
ACKNOWLEDGEMENTS
Work supported by the Portuguese Science
Foundation (grant PTDC/EEA-CRO/100655/2008).
Ana Silva is supported by PhD Grant
SFRH/BD/70396/2010, granted by the Portuguese
Science Foundation.
REFERENCES
Badia, S. B. i., Bernardet, U. & Verschure, P. F. M. J.,
2010. Non-Linear Neuronal Responses as an Emergent
Property of Afferent Networks: A Case Study of the
Locust Lobula Giant Movement Detector. PLoS
Comput Biol, 6(3), p. e1000701.
Blanchard, M., Rind, F. C. & Verschure, P. F. M. J., 2000.
Collision avoidance using a model of the locust
LGMD neuron. Robotics and Autonomous Systems,
30(1), pp. 17-37.
Gabbiani, F., Krapp, H. G., Koch, C. & Laurent, G., 2002.
Multiplicative computation in a visual neuron sensitive
to looming. Nature, Volume 420, pp. 320-324.
Gabbiani, F., Krapp, H. & Laurent, G., 1999. Computation
of object approach by a wide-field motion-sensitive
neuron. J. Neurosci., Volume 19, 1122-1141.
Gabbiani, F., Mo , C. & Laurent, G., 2001. Invariance of
Angular Threshold Computation in a Wide-Field
Looming-Sensitive Neuron. The Journal of
Neuroscience, 21(1), p. 314–329.
Gray, John R , J. R., Lee, J. K. & Robertson, R., 2001.
Activity of descending contralateral movement detector
neurons and collision avoidance behaviour in response
to head-on visual stimuli in locusts. Journal of
Comparative Physiology A, Volume 187, pp. 115-129.
Gray, J. R., Blincow, E. & Robertson, R., 2010. A pair of
motion-sensitive neurons in the locust encode approaches
of a looming object. Journal of Comparative Physiology
A: Neuroethology, Sensory, Neural, and Behavioral
Physiology, 196(12), pp. 927-938.
Guest, B. B. & Gray, J. R., 2006. Responses of a looming-
sensitive neuron to compound and paired object
approaches. Journal of Neurophysiology, 95(3), pp.
1428-1441.
MATLAB, 2011. version 7.12.0 (R2011a). Natick,
Massachusetts: The MathWorks Inc..
Meng, H., Yue, S., Hunter, A. Appiah, K., Hobden, M.
Priestley, N., Hobden, P. & Pettit, C., 2009. A
modified neural network model for the Lobula Giant
Movement Detector with additional depth movement
feature. Atlanta, Georgia: Proceedings of International
Joint Conference on Neural Networks, 14-19 June.
Rind, F., 1987. Non-directional, movement sensitive neurones
of the locust optic lobe. Journal of Comparative
Physiology A: Neuroethology, Sensory, Neural, and
Behavioral Physiology, Volume 161, pp. 477-494.
Rind, F. C. & Bramwell, D. I., 1996. Neural Network
Based on the Input Organization of an Identified
Neuron Signaling Impeding Collision. Journal of
Neurophysiology, 75(3), pp. 967-985.
Stafford, R., Santer, R. D. & Rind, F. C., 2007. A bio-
inspired visual collision detection mechanism for cars:
combining insect inspired neurons to create a robust
system. BioSystems, Volume 87, pp. 164-171.
Yue, S. & Rind, F.C., 2006. Collision detection in
complex dynamic scenes using an LGMD-based
visual neural network with feature enhancement. IEEE
transactions on neural networks. 17 (3), 705-716.
ISSN 1045-9227.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
140
