
Modified Hybrid Evolutionary Strategies Method for Termination
Control Problem with Relay Actuator
Ivan Ryzhikov
and Eugene Semenkin
Institute of Computer Sciences and Telecommunication, Siberian State Aerospace University,
Krasnoyarskiy Rabochiy Ave., 31, 660014, Krasnoyarsk, Russia
Keywords: Termination Control Problem, Evolutionary Strategies, Relay Control, Two-point Boundary Problem,
Dynamic Systems.
Abstract: The termination control problem, i.e., the problem with finite time and relay control function, is considered.
The proposed approach fits different control problems, e.g., problems with the fixed or free time, problems
with the set-up actuator characteristics and problems where the actuator can be tuned. The considered
system is the nonlinear dynamic one and the number of relay switch points assumed to be tuned indirectly.
To find out the solution of the given problem, the modified evolution strategies method is suggested. The
proposed approach is useful also for the non-analytical system models and systems that can be evaluated
numerically.
1 INTRODUCTION
The termination control task is the special case of
the optimal control task with the goal of finding out
a control function that would bring the system from
the given initial point to the desired point within a
finite time. We can also say, that the termination
control task is a special case of two-point boundary
values problem. Solutions of the two-point boundary
problem and termination control task are described,
for example, in (Cash and Mazzia, 2006) and
(Tewari, 2011), respectively. Due to the practical
needs, searching for the programmed control
function is restricted by the actuator characteristics.
The actuator can be an engine with uncontrolled
pull, so it posses only the values from some finite
set. As a special case, actuator can be a relay. Also,
the system itself is often nonlinear or algorithmically
represented. It is the main reason to investigate the
new method of programmed relay control
generation. For example, in the article (Aida-zade
and Anar, 2010) an approach to relay switch points
correction is given, when the control function is a
relay, and the determination of the switch points
number in the case of linear dynamic system is
fulfilled. As we can see the relay program control is
still an actual problem. But for the application of this
approach one needs at least some control function
which could be then tuned. In this study, we
consider the termination relay control problem for
nonlinear dynamic systems. Our approach does not
require any initial approximation of control function.
In the article (Kucherov et al., 2009) a method for
the relay control synthesis is proposed also for a
linear dynamic system. Generally speaking, the
methods for solving the termination control problem
with relay actuator for non-linear systems are not
well known. However, such problem statements are
very important in many significant areas, such as
aircrafts and spacecrafts control.
Moreover, every optimal control problem with
Hamiltonian linear over control is reduced to the
termination control problem with known relay
characteristics. All above is a reason for our study.
2 TERMINATION RELAY
CONTROL PROBLEM
DEFINITION
Let the system be described with nonlinear
differential equation
(,,)
dx
f
xut
dt
= ,
(1)
333
Ryzhikov I. and Semenkin E..
Modified Hybrid Evolutionary Strategies Method for Termination Control Problem with Relay Actuator.
DOI: 10.5220/0004044403330337
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 333-337
ISBN: 978-989-8565-21-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

where
():
nn
f
RRR R
+
⋅××→ is a vector function of
its arguments;
n
x
R∈
is a vector of system state;
______
(): , { , 1, }
uu i u
ut R U U u Ri N
+
→=∈= is a
piecewise continuous function;
n is the system dimension.
We need to find a control function
u(t) that
brings the system from the initial point
0
(0)
x
x
=
to
the end point
*
()
x
Tx=
within finite time T.
Though the piecewise continuous function fits
only special systems, the relay approach is useful for
every optimal control problem if the Hamiltonian is
linear over control:
12
(, ,) (, ) (, )
H
xpu xp xpu=+
ϕ
ϕ
,
and the control function itself is modulo limited.
Solving a problem with an ideal relay, we find
the control function with the structure
1
2
,,
()
,.
A
tI
ut
A
tI
−∈
⎧
=
⎨
∈
⎩
,
(2)
where
12
,
I
I are sets of intervals determined by the
switch points and
12
[0, ]II T∪=
;
A
is the relay
amplitude.
For multilevel control problems we find a control
function with the structure
11
,,
()
,.
uu
NN
utI
ut
utI
∈
⎧
⎪
=
⎨
⎪
∈
⎩
M
,
(3)
where
______
,1,
iu
I
iN= are intervals, determined by switch
points,
1
[0, ]
u
N
i
i
IT
=
=
U
,
1
u
N
i
i
I
=
=
∅
I
;
______
{,1,}
iu
UuRi N=∈ = is a control function
which posses values only from given set;
u
N is a number of relay positions (levels).
Let
____
10
:, 0,,0
ii i i
P rrrrR i kr
+
+
⎧
⎫
=<∈∀= =
⎨⎬
⎭
⎩
be
the set of switch points,
k be the number of switch
points chosen by user. Let
____
:1,
ii
L
ll Ni k
⎧
⎫
=∈∀=
⎨⎬
⎭
⎩
be the set of indexes. Then each interval
______
,1,
iu
I
iN=
for control (3) can be determined with the equation
1
0
{(, ] (,), }
u
N
ijjIj
j
I
rr fijr Pj
+
=
=
⋅∈∀
U
,
where
1,
(, )
0,
j
I
j
iL
fij
iL
=
⎧
⎪
=
⎨
≠
⎪
⎩
is an index function. For
ideal relay (2) we can describe another scheme for
the problem solving. We demand the change of sign
at every switch point. It means that all we need to
know for ideal relay are the sign of control at
0t
=
and the switch points, because these characteristics
are enough to describe the control structure.
In the practice, there are two different problem
statements:
- the control problem, where the determination
of the actuator and determination of control function
are necessary. It means that we need to find the
characteristics of the actuator and programmed
control function that fit the termination control goal
within given finite time
T .
- the control problem, where the control program
determination only is necessary and when
T is
undefined.
The question about the number of switch points
determination is left open though there is an indirect
tuning of this number. First of all, if there is any
switch point
rT> then it will not result on the
control process. If researcher wants to fix the
number of switch points, there is another way to for
the set
____
10
:,, 0,,0
ii i i i
P rrrrRrTi kr
+
+
⎧
⎫
=<∈≤∀= =
⎨
⎬
⎭
⎩
%
determination in the way that all the switch points
will belong to the control interval. The second way
is determined by the feature of numerical scheme
that would be used to describe the process (1). Let
h
be the integration step, so
11ii
rr h
+−
−< means that
control interval
]
(
1
,
ii
rr
+
would not influent on the
system behaviour, so these control switching points
could be ignored.
Let
S be the set of parameters that determine
the control structure of the task. For multilevel relay
systems
{
}
,,SPLU= and for the reduced scheme
of the ideal relay
{
}
,(0)SPu= . If we have the
control problem with unfixed time and given relay
characteristics then
{
}
,SPL= for multilevel relay
and
{
}
SP=
for ideal relay.
Now let us consider criteria for different control
problems and ways of realization. As there are
different sets determined control problem, then the
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
334

problem itself can be reduced to the optimization
task with real variables, or the optimization task with
real and integer variables. If the time is fixed, the
criterion can be defined with the function
*
1
() () min
SS
S
FS xTx
=
=− →
%
%
%
,
(4)
where
()
SS
xT
=
%
is the system (1) state at the point
T
, and the control function is determined by S
%
. If
the time is free, then the criterion is
*
2
,
(,) () min
SS
ST
FST xTx
=
=− →
%
%
%
.
(5)
There are also inequality constraints for both criteria
____
1
,1,
iii
rrrR i k
+
+
<∈∀=,
(6)
which ensure every switch point to be inside the
[0, ]T interval. It means that we use P
%
instead of P
that gives one more constraint:
k
rT< .
Let introduce a special penalty function
,0
()
0, 0
xx
x
x
⎧>
ϕ=
⎨
≤
⎩
,
and weight coefficient
α
. Now the constrained
minimization problem becomes the unconstrained
optimization problem. After adding the penalty
function into criteria (4) and (5), we have,
respectively
31
() () ( ) min
k
S
FS FS r T=+α⋅ϕ−→
%
%%
%
,
(7)
42
,
(,) (,) ( ) min
k
ST
FST FST r T=+α⋅ϕ−→
%
%%
%
.
(8)
For the constraints
1ii
rr
+
< , we can add the sum of
penalty functions
1
1
1
()
k
ii
j
rr
−
+
=
β⋅ ϕ −
∑
with weight
coefficient
β
to every criterion (4), (5), (7), (8). This
sum gives a penalty for violation of the constraint
________
1
,1,1
ii
rri k
+
<=−. Adding it to criteria (4), (5), (7)
or (8) gives us unconstrained optimization problem.
3 MODIFIED EVOLUTIONARY
STRATEGIES ALGORITHM
Thus, the termination control problem was reduced
to the optimization task with one of objective
functions (4), (5), (7), (8) with real and integer
numbers. The objective function, in general case,
has no analytical form and has to be evaluated
numerically. This is why evolution-based
optimization algorithm has to be used. Genetic
algorithm (GA) does not fit to the given task,
because it needs the a priori known range for every
variable. Also, the discretization of real numbers for
GA adds extra troubles to the computation process.
The main principle of evolutionary strategies
(ES) is described in (Schwefel, 1995). Additionally,
we borrowed the operand definitions for integer
numbers from the GA. Our ES-based optimization
algorithm uses selection, recombination, mutation
and local optimization operands. The selected pair of
parents creates an offspring with given probability.
Then the offspring is mutated. The population size is
constant for all generations. The following GA
selection types were used: fitness proportional, rank
based and tournament based. Let every individual be
represented with a tuple
______
,, (),1,
ii i
ip
I
d op sp fitness op i N==
,
where
1
( ) , {1,...,4}
1()
q
fitness op q
Fop
=∈
+
is the fitness function for problems (4), (5), (7), (8),
respectively,
____
,1,
i
j
op R j k∈= is the set of objective
parameters,
____
,1,
i
j
s
pRj k
+
∈=
is the set of method
strategic parameters and
p
N is the size of
population.
The solution of any task with criteria (4), (5),
(7), (8) determines the set of objective parameters
4
1
j
j
op
=
=
ρ
U
, where the every criterion defines sets
____
,1,4
j
jρ=
. Here
____
1
{,1,}
j
tRj kρ= ∈ =
is the set of switch
points,
____
2
{,1,}
j
lNj kρ= ∈ = is the set of indexes,
3
{}TR
ρ
=∈ is the time and
______
4
{,1,}
j
u
uRj Nρ= ∈ =
is the
u
U set. According to the nature of given sets,
standard ES recombination and mutation can be used
for
134
,,
ρ
ρρ, and the standard GA recombination
(one-point, two-point and uniform crossover) can be
used for
2
ρ
.
The set of strategic parameters
1234
,sp sp
=
ρ+ρ+ρ+ρ , defines the mutation
operands.
Now we have to modify the mutation operation
for the ES adapting to our problems. Let
1
[0,1]
p
m ∈
be the mutation probability for every gene and
1
Z
be
the Bernoulli distributed random value with
1
1
(1)
p
Pz m== . Then
ModifiedHybridEvolutionaryStrategiesMethodforTerminationControlProblemwithRelayActuator
335

_______________
1
(0, ), , 1, ( )
ii i i
op op z N sp op R i card op=+⋅ ∀∈= ;
_______________
1
(0,1), 1, ( )
ii
s
p sp z N i card sp=+⋅ = .
Let
2
p
m
be the mutation probability for integer gene.
Let
2
Z
be also the Bernoulli distributed value with
2
2
(1)
p
Pz m== ,
3
(0,1)ZU= be a random value that
is uniformly distributed, and
u
Z
be a uniformly
distributed integer random value,
1
( 1) ... ( )
uu
Pz Pz k
k
=== = =
. We also need a
function
0,
(,)
1,
z
ab
fab
ab
<
⎧
=
⎨
≥
⎩
. Each gene is mutated
if
3
(,)1
zi
fspz = . We can now allow the strategy
parameters to affect on this mutation probability:
22
(1 )
iiu
op z op z z=− ⋅ +⋅,
_______________
,1, ()
i
op N i card op∀∈ = and
22
(1 ) (0,1)
ii
sp z sp z N=− ⋅ +⋅
.
Next modification is fulfilled to avoid
constraints
1ii
rr
+
< satisfaction. We make a special
transition from the objective parameters to the
switch points:
____
1
,1,
i
ij
j
ropik
=
==
∑
, and change the
mutation operator to
1
(0, ) ,
ii i
op op z sp=+⋅Ν
1, ...ik= . In this case, the objective parameters will
be nonnegative and the initial population will be
generated with nonnegative individuals.
The random coordinate-wise real-valued genes
optimization has been implemented for the
algorithm performance improvement. The
optimization is fulfilled in the following way. For
every
2
N randomly chosen real-valued genes for
1
N randomly chosen individuals
3
N steps in
random direction with step size
l
h are executed.
For the numerical experiments in our study, the
parameters of the ES-based optimization procedure
were set as followed: the population size is 50, the
number of generation is 50, the recombination is set
as discrete one with the probability 0.8, the mutation
probability for every gene was set to
1/
s
p . Local
improvement parameters were set as
1
2Nop
=
⋅ ,
2
Nop= and
3
5N = with 0.05
l
h = .
The proposed algorithm performance has been
evaluated on tens test problems and was found to be
promising.
4 TERMINATION CONTROL
PROBLEM FOR THE
SATELLITE MOTION ON
GEOSTATIONARY ORBIT
Let us consider a system that define the motion of a
satellite on the geostationary orbit:
2
23
213 3
2
11
() 2
1
(,) , , ,
ut x x
f
xt x x x x
x
x
⎛⎞
−−⋅⋅
=⋅−
⎜⎟
⎝⎠
.
It is necessary to reach the point
(
)
( ) 1, 0, 1,
x
TT=
from the initial point
(
)
(0) 1, 0, 1, 0.785x = within given finite time
T, so the satellite would come from one orbit to
another one. Actuator works as a relay
(): ,
u
ut R U
+
→ {,}
u
UAA
=
− , where
A
is the
engine force.
20 runs of the proposed algorithm with the given
above parameters were executed for the considered
problem. Results were averaged.
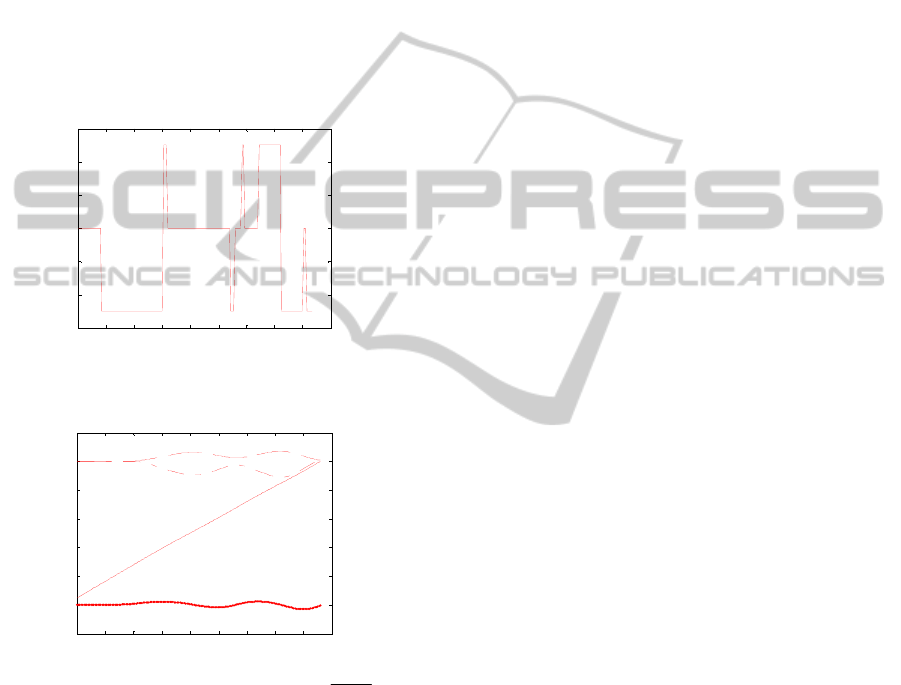
Let us set the initial number of switch points
10k
=
. Then for 10T
=
and the criterion (7) we can
find the solution. The control function is shown on
Figure 1 and the system state is depicted on Figure
2. The system coordinates at the end point are
(
)
(10) 1.0007, 0.0064, 1.0069, 10.002x =− . The
0 1 2 3 4 5 6 7 8 9 10
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
Figure 1: Control function ()ut .
0 1 2 3 4 5 6 7 8 9 10
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Figure 2: System state:
4
123
()
(), (), (),
x
t
xt xt xt
T
.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
336
mean of the objective function (7) is 0.0028. The
objective function evaluations nimber was no more
than
4
410⋅ during every algorithm run.
For the same termination control problem but
with actuator defined by the set
{ 0.005, 0, 0.005}
u
U =− , we used the criterion (5)
with
k
Tr= . For 20k = the following solution was
found:
17.2T = ,
()
(17.2) 1.009, 0.0065, 1.0048, 17.21x =− . The
mean of the objective function (5) is 0.018. The
objective function evaluations number was no more
than
4
6.25 10⋅ in every run. Similar graphics are
shown on Figures 3 and 4.
0 2 4 6 8 10 12 14 16 18
-6
-4
-2
0
2
4
6
x 10
-3
Figure 3: Control function ()ut . Time is unfixed. Three-
position relay.
0 2 4 6 8 10 12 14 16 18
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Figure 4: System state:
4
123
()
(), (), (),
x
t
xt xt xt
T
.
As one can see, the proposed algorithm effectively
solves the relay termination control problem for non-
linear dynamic systems. The algorithm can find the
problem solution with multilayer relay and
automatically determine the number of the relay
switch points.
5 CONCLUSIONS
In this study, the method solving the termination
control problem with the relay actuator for different
task definitions was described. The method fits if the
actuator is a multilevel relay which, in other words,
can be represented with a piecewise continuous
function with indirect tuning of the switch points
number. It is useful also if the maximum principle
reduces the control function to be the ideal relay.
The system can be described not only analytically,
but also algorithmically.
In the future the investigation of the dependence
between the number of switch points and the
algorithm efficiency should be fulfilled. For today,
there is also no certainty about what the optimization
problem statement (constrained or unconstrained)
should be chosen for the higher solution precision.
It is important also to apply the proposed algorithm
to the control problems with non-classical
constraints that appear in real control problems.
REFERENCES
Aida-zade Kamil Rajab, Anar Beybala Rahimov, 2010.
Relay Control of Nonlinear System with Uncertain
Values of Parameters. Journal of Automation and
Information Sciences. Volume 42 / Issue 7.
Cash J. R., Mazzia F., 2006. Hybrid Mesh Selection
Algorithms Based on Conditioning for Two-Point
Boundary Value Problems. Journal of Numerical
Analysis, Industrial and Applied Mathematics Vol 1,
No 1, pp 81-90.
Kucherov D.P., Vasilenko A.V., Ivanov B.P., 2009.
Dynamic system with derivative element adaptive
terminal control algorithm. Automatics.
Automatization. Electronical complexes and systems.
No 23, pp166-171.
Tewari Ashish, 2011. Advanced Control of Aircraft,
Spacecraft and Rockets, John Wiley and Sons.
Schwefel Hans-Paul, 1995. Evolution and Optimum
Seeking. New York: Wiley & Sons.
ModifiedHybridEvolutionaryStrategiesMethodforTerminationControlProblemwithRelayActuator
337
