
Modified Evolutionary Strategies Algorithm in Linear Dynamic
System Identification
Ivan Ryzhikov and Eugene Semenkin
Institute of Computer Sciences and Telecommunication, Siberian State Aerospace University,
Krasnoyarskiy Rabochiy Ave., 31, 660014, Krasnoyarsk, Russia
Keywords: Linear Dynamic System, Linear Differential Equation, Evolutionary Strategies, Parameters Identification
Problem, Structure Identification.
Abstract: The approach to dynamic systems modelling in the form of the linear differential equation that uses only the
system output and the control sample is presented. To develop a linear dynamic model as an ordinary
differential equation we need to know the structure of differential equation and its order, so then it would be
possible to identify parameters. It is common that measurements of the system output are distorted with a
noise. In case of the non-uniform sample we would need a special output function approximation approach
so the unit step function can be estimated. The dynamic system identification with an ordinary linear
differential equation allows solving different control tasks, determining the system state with another
control function.
1 INTRODUCTION
The solution for the given problem can be obtained
with neural networks, fuzzy logic systems or other
methods with universal structure. However,
following models would not fit if we need an
analytical form of model. There is also a possibility,
in general, to build the solution using exponential,
trigonometric and other functions that describe the
ordinary differential equation (ODE) solution, but
the control function could be given in non-analytical
form. The static model that was build as an
approximation with these functions is not as useful
and flexible as the dynamic model. Moreover, the
task would be reduced to the enumerative technique
for different combination of functions, since we do
not know the order of equation and multiplicity of
characteristic equation roots. In article (Janiczek and
Janiczek, 2010) we can see an identification method
in terms of fractional derivatives and the frequency
domain. The information about the plant is taken
from the given frequency domain and not from the
output observations. Having the model in fractional
derivatives requires special control and regulation
methods. We can also use stochastic difference
equations as in (Zoteev, 2008), and build a model
using the output observations, observations of
reaction on step excitation. This approach is partially
parameterized: the order and the functional relation
between the system state and previous states are
commonly unknown. In article (Parmar et al., 2007)
the dynamic system approximation with the second
order linear differential equations is examined. The
coefficients are determined with the genetic
algorithm. In this paper, there is the description of
the structure and parameters identification task
solution, reduction the identification task to the real
value optimization with the modified evolutionary
strategies method. The goal of approach presented in
this study is finding the order of the differential
equation and its parameters using only the distorted
output data and the optimization technique.
2 STRUCTURE
AND PARAMETERS
ESTIMATION PROBLEMS
Let us have the sample
{
}
,, , 1,
iii
yut i s= , where
i
yR
∈
is the dynamic system output measurements
at a time point
i
t , ()
ii
uut
=
is a control action. It is
also known, that the system is linear and dynamic
one, so it can be described with ODE:
618
Ryzhikov I. and Semenkin E..
Modified Evolutionary Strategies Algorithm in Linear Dynamic System Identification.
DOI: 10.5220/0004044706180621
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 618-621
ISBN: 978-989-8565-21-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

() ( 1)
10
()
kk
kk
ax a x axbut
−
−
⋅+⋅ ++⋅=⋅K ,
0
(0)
x
x= .
(1)
Here
0
x
is supposed to be known. In case of the
transition observing, we can put forward a
hypothesis about initial conditions: the system
output is known at the initial time point and the
derivative values can be set to zero, if the nature of
the problem is such or can be so approximated.
Using the sample data, we need to identify
parameters and the system order m , which is
assumed to be limited, so
,mMMN≤∈.
M
is a
parameter that is set by the user. It is also assumed,
that there is an additive noise
:()0,()EDξξ= ξ<∞, which results on output
measurements:
()
iii
yxt=+ξ.
(2)
Without loss of generality, one may assume that
the system is described with following equation:
() ( 1)
10
()
kk
k
kkk
aa
b
x
xxut
aaa
−
−
+⋅ ++⋅=⋅K
(3)
or
() ( 1)
1
()
kk
k
x
ax axbut
−
+⋅ ++⋅=⋅
%
%%
K .
(4)
Then we can seek the solution of the
identification task as a linear differential equation
with the order
,mMMN≤∈:
() ( 1)
10
ˆˆˆ ˆˆˆ
()
mm
m
x
ax axaut
−
+⋅ ++⋅=⋅K ,
0
ˆ
(0)
x
x= .
(5)
Here the vector of equation parameters
()
10
ˆˆˆˆ
0, , 0, , , ,
T
n
m
aaaaR=∈KK ,
1nM=+, has to deliver the extremum for the
functional
1
ˆ
ˆ
() () min
n
N
ii
aR
i
aa
Ia y xt
∈
=
=
=− →
∑
.
(6)
In general case, the solution
ˆ
()
x
t is computed with a
numerical integration method as the control function
may have not analytical but algorithmic form. For
the correct numerical scheme realization, let us have
a coefficient restriction for the equation (3),
0.05
k
a > . Otherwise, this parameter is going to be
equal to zero, so
0, 1
k
amm==−. This condition
prevents extra computational efforts of the
numerical evaluation scheme.
3 MODIFIED HYBRID
EVOLUTIONARY STRATEGIES
ALGORITHM FOR ORDINARY
DIFFERENTIAL EQUATION
IDENTIFICATION
The reason why the modification of an evolutionary
strategies algorithm was used is that the
identification problem leads to solve multimodal
optimization problem. The specific representation of
the equation structure results in searching not only
parameters but also the structure at the same time
that makes the criteria (6) complex. As a method for
finding the solution for ODE identification, the
hybrid modified evolutionary strategies method was
developed. Original evolutionary strategies approach
can be found in (Schwefel, 1995). Let every
individual be represented with the tuple
______
,, (),1,
ii i
iI
H
op sp fitness op i N==,
where
____
,1,
i
j
op R j k∈= is the set of objective
parameters described the differential equation;
____
,1,
i
j
s
pRj k
+
∈= is the set of method strategic
parameters;
I
N is the population size;
1
(): (0,1], ()
1()
k
fitness x R fitness x
I
x
→=
+
is
the fitness function. The bigger fitness function
value is, i.e., the fewer criterion (6) is, the more
chances would have the individual to survive.
Proportional, rank and tournament selection
operators were chosen as selection operator types.
The algorithm produces one offspring from two
parents. The population has the same size for all
generations. Actually, these kinds of selection were
borrowed from the conventional genetic algorithm.
Let (
11
,op sp ) be the chromosome of the first parent
that takes part in recombination and (
22
,op sp
) be
the chromosome of the second parent. We consider
different recombination types for the objective
parameters (for strategic parameters it would be the
same):
- intermediate crossover (here and
further
____
1,in=
):
12
2
offspring
ii
i
op op
op
+
=
;
ModifiedEvolutionaryStrategiesAlgorithminLinearDynamicSystemIdentification
619

-
weighed intermediate crossover:
11 2 2
12
() ()
() ()
offspring
ii
i
f
itness op op fitness op op
op
fitness op fitness op
⋅+ ⋅
=
+
;
-
discrete crossover:
12
(1 )
offspring
iii
op z op z op=−⋅ +⋅ ;
- randomly weighted crossover. Let
(0,1)Rv U
=
be the uniformly distributed random value:
12
(1 )
offspring
iii
op op Rv op Rv=⋅+⋅−
.
The mutation of every offspring’s gene is
executed with the chosen probability
m
p . If we have
the random value
{0,1}, ( 1)
m
zPzp===, which is
generated for every objective gene and its strategic
parameter then
(0, )
offspring offspring offspring
ii i
op op z N sp=+⋅ ;
(0,1)
offspring offspring
ii
sp sp z N=+⋅,
where
2
(, )Nmσ is normally distributed random
value with the mean m and the variance
2
σ
.
We suggest a new operation that could increase
the efficiency of the given algorithm. For every
individual, the real value is rounded to integer. That
provides searching for solutions with near the same
structure. This modification is made to decrease the
destructive effect of the mutation on the forming the
structure.
Also for
1
N randomly chosen individuals and
for
2
N randomly chosen objective gene we make
3
N iterations of the local optimization with the step
l
h to determine the better solution. It is the random
coordinate-wise optimization. Local optimization is
executed until fitness function increases.
4 TESTING THE ALGORITHMS
WITH DIFFERENT SETTINGS
To make an investigation 50 systems were
generated. It means that for every order of the
differential equation from the first to the ninth we
have 5 different systems. Parameters of the systems
were randomly generated:
(5,5),
i
k
aU=−
)
(5,5),
k
bU=−
)
______
2,10,i =
___
1,ki
=
, where (5,5)U
−
is
the uniform distribution. The solution of every
system was found with the Runge-Kutta integration
method with the step
0.05
i
h
=
. The time of the
process was set to 5. The control function was the
step excitation and we know what was the control
for every system, so
() 1ut
=
. Let
{}
,, 1,/
ii i
x
ti Th=
be the numerical solution for the system. We take
/, 100
i
sThs
<
= points randomly. For every
system 10 runs of the algorithm were executed with
every combination of its parameters. Now, to
estimate the efficiency of different approaches we
consider the identification without any noise.
Having different types of the selection and the
crossover, we would also vary the
151
,,,1
11 11 5
m
p
⎧
⎫
∈
⎨
⎬
⎩⎭
to find out the most effective
combination of the algorithm settings. As a preset
we use population size in 50, number of populations
in 50,
1
50N
=
,
2
50N
=
and
3
1N = with
0.05
l
h
=
.
Now we can compare the efficiency of following
algorithms: 1 – the evolutionary strategies (ES)
algorithm; 2 – ES with the local optimization, hybrid
evolutionary strategies (HES); 3 – HES with
modified mutation; 4 – HES with turning real
numbers into integer numbers; 5 - HES with
modified mutation and turning real numbers to
integer ones.
After testing the algorithms on different
samples of the systems, the efficient presets were
found: modified HES algorithm with turning the real
numbers to integer ones, 50 individuals for 50
populations,
1
50N
=
,
2
50N = and
3
1N = with
0.05
l
h
=
, the tournament selection with the
tournament size 25%, the discrete crossover and the
mutation with the probability
5
11
m
p =
.
Table 1: Mean criterion values for different algorithms and
system orders.
Algorithm
Order 1 2 3 4 5
1 0,63 0,72 0,93 0,92 0,93
2 0,69 0,73 0,74 0,79 0,85
3 0,74 0,76 0,90 0,88 0,91
4 0,69 0,79 0,99 0,98 0,99
5 0,89 0,96 0,99 0,99 0,99
6 0,76 0,80 0,82 0,83 0,86
7 0,89 0,96 0,96 0,98 0,99
8 0,85 0,89 0,93 0,91 0,93
9 0,99 0,99 0,99 0,99 0,99
10 0,99 0,99 0,99 0,99 0,99
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
620
It is important to notice that even if criterion (6)
is equal to 0, it does not mean that the model has the
same structure and parameters as the real system
structure and parameters are. For the proper
structure and parameters determination we need an
adequate sample that reflects all the transient
process. Let us take some stable systems that come
into the steady state in time
5T = . In Table 2 we
would make an efficiency investigation for the
modified HES algorithm. 20 runs of the algorithm
were made for every system. We will say that the
algorithm determines the structure and parameters if
ˆ
max( ) 0.05aa−<
.
Table 2: The efficiency of “true” parameters estimation.
Order
ˆˆ
(max( ) 0.05)paa−<
Fitness
1 0,65 0,959344
2 0,95 0,99795
3 0,9 0,997798
4 0,95 1
5 0,8 0,996173
As we can see from Table 2, the high fitness is
not the sufficient condition for the solution found to
be true one. Let us highlight that for every solution
found from this study for stable systems, the order
was found correctly.
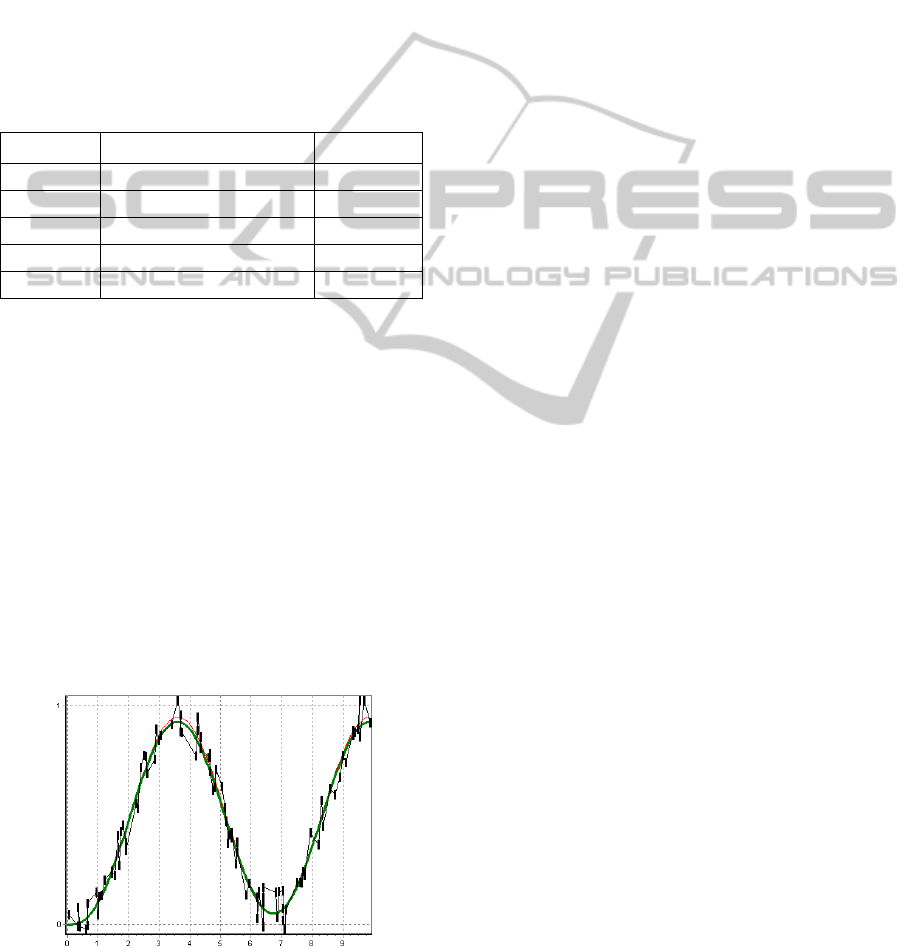
Now let us consider an example of the
identification task solving for the system of the third
order to show that even with
10M = the satisfying
solution can be found. Let the differential equation
coefficients be
()
0, ,0,1,2,1,2a = K .
With the recommended settings of the algorithm, the
absolute error mean for 20 runs is 0.063. The model
output, the sample and the real system output are
shown on the Figure 1, found parameters are
()
ˆ
0, , 0, 1, 2.05, 1, 2.05a =
K .
Figure 1: Measurements, model and the real object (thin
line).
5 CONCLUSIONS
In this paper, the method of ordinary differential
equation structure and parameters identification was
described. With the proposed approach, the structure
and parameters are automatically determined.
Modifications of evolutionary strategies algorithm
increase the accuracy of model and allow solving
two tasks at the same time. It is important to note
that proposed modifications allow the algorithm to
find, in general, the right system order. The
efficiency of the algorithm for reduced identification
problem depends mostly on the sample. The better
sample represents the transient process, the better it
would be estimated. The further work with the
approach proposed will be concentrated on
investigation algorithm performance on the
problems with different noise levels, sizes of the
sample and different input functions.
REFERENCES
Janiczek T., Janiczek J., 2010. Linear dynamic system
identification in the frequency domain using fractional
derivatives. Metrol. Meas. Syst., Vol. XVII, No 2, pp.
279-288.
Parmar G., Prasad R., Mukherjee S., 2007. Order
reduction of linear dynamic systems using stability
equation method and GA. International Journal of
computer and Infornation Engeneering 1:1.
Schwefel Hans-Paul, 1995. Evolution and Optimum
Seeking. New York: Wiley & Sons.
Zoteev V., 2008. Parametrical identification of linear
dynamical system on the basis of stochastic difference
equations. Matem. Mod., Vol. 20, No 9, pp 120-128.
ModifiedEvolutionaryStrategiesAlgorithminLinearDynamicSystemIdentification
621
