
Estimating Real Process Derivatives in on-Line Optimization
A Review
M. Mansour
Faculty of Electronics and Computer Science, USTHB, PO. BOX 32, El_Allia. Bab-Ezzouar, Algiers, Algeria
Keywords: on-Line Optimization, Model-based, Process Derivatives, ISOPE Algorithm, ANN.
Abstract: The solution of the Integrated System Optimization and Parameter Estimation (ISOPE) problem necessitates
the calculus of real process output derivatives with respect to the inputs. This information is needed in order
to satisfy first and second order optimality conditions. Several methods exist and have been developed for
calculating these derivatives. In this paper a review of most of the existing methods is presented, in which
the Finite Difference Approximation, Dual Control Optimization, Broydon’s method, Dynamic Model
Identification, with both linear and nonlinear models, together with a neural networks scheme are presented
and applied, under simulation, to a cascade Continuous Stirred Tank Reactor (CSTR) system. The results
are then discussed and compared to identify the advantages and disadvantages of using each method.
1 INTRODUCTION
The requirement for processes to operate at their
optimum operating condition is becoming
increasingly prevalent. One model-based algorithm
that has been developed and which can achieve
optimum process operation in spite of model-reality
mismatch is the Integrated System Optimization and
Parameter Estimation (ISOPE) algorithm (Roberts,
1979). One requirement of the ISOPE algorithm, in
order to satisfy the necessary optimality conditions,
is the need for estimates of real process derivatives.
These derivatives are estimated on-line at each
iteration of the algorithm. The finite difference
method originally used by Roberts (1979) to
estimate these derivatives has proven not to be
efficient in the case of large, slow and noisy
processes (Mansour and Ellis, 2003). Alternative
methods have therefore been developed. The
dynamic model identification technique, which is
based on the identification of a dynamic model, was
incorporated within the ISOPE algorithm by Zhang
and Roberts (1990). Although this technique proved
to be fast enough as it performs the identification
during transient, it encountered some difficulties
such as: the huge amount of data needed and the
poor, inaccurate, model it produces at the beginning
of the identification. After that, an algorithm with
dual control effect was proposed (Brdys and
Tatjewski, 1992). In this algorithm the current
control signal is generated to satisfy the main control
goal and at the same time provide sufficient
information for future identification action. The
main advantage of this algorithm is that it does not
need excessive set-point changes to estimate the
process derivatives. However, this method
encountered the same type of problems as the
previous ones. Broydon's approximation method
based on the well-known Broydon’s family of
formulas which are mainly oriented to the
approximation of derivatives was also implemented
(Fletcher, 1980). Lately, a nonlinear version of the
dynamic model identification was applied and
implemented (Mansour and Ellis, 2003). In this
paper, a review of all these techniques together with
a method based on artificial neural networks is
presented. In addition, a comparison is made using
simulations carried out on a cascade CSTR system
to show the advantages and disadvantages of each
method.
2 THE OPTIMIZATION
PROBLEM AND THE ISOPE
ALGORITHM
We The ISOPE algorithm (or modified two steps)
was proposed by Roberts (Roberts, 1979) to solve
the general optimization problem of finding the
120
Mansour M..
Estimating Real Process Derivatives in on-Line Optimization - A Review.
DOI: 10.5220/0004059101200124
In Proceedings of the 2nd International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2012),
pages 120-124
ISBN: 978-989-8565-20-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

optimum operating point of a system while it is
moving from one operating point to another. It uses
an adaptive steady-state model of the process, in
which the parameters are updated periodically by
comparing model outputs with those of the real
process.
The general form of the algorithm is given as
follows (Mansour and Ellis, 2008):
Apply the current input
k
v
%
to the real process and
wait for the system to settle down to obtain steady-
state measurement
*
k
y
%
. Then use the existing
mathematical model to determine the model
parameters
k
α
%
to minimize the comparison index
given by:
(, )
,
()
()0
Min Gu
y
Hv
gu
α
α
α
=
≤
%
%
%
%%
%
%
(1)
where
*2
1
(, ) ,(())
r
ii i
i
Gu w y h u
αα
=
= −
∑
%%
%%%%
(2)
and
w
%
is a weighting vector.
Solve the modified model-based optimization
problem given by:
((, (,)) )
,
()
()0
u
Min Q Huu u
yHv
gu
λ
α
α
−
=
≤
%
%
%% %
%%
%
%
(3)
In order to obtain the new candidate
1k
u
+
%
.
Where
1
*
T
T
yy yQ
vv
λ
α
α
−
⎡⎤
⎡⎤
∂∂ ∂∂
⎡⎤ ⎡⎤⎡⎤
⎢⎥
=−
⎢⎥
⎢⎥ ⎢⎥⎢⎥
∂∂∂∂
⎣⎦ ⎣⎦⎣⎦
⎢⎥
⎣⎦
⎣⎦
%% %
%%
%%
(4)
λ is called a modifier and is obtained following
consideration that the necessary optimality
conditions, of the system optimization problem,
have to be satisfied (Roberts, 1979; Ellis et al., 1988;
Roberts and Williams, 1981).
However, the new control
1k
u
+
%
is not directly
applied to the system for stability reasons. Instead,
the following relaxation scheme is used:
11
=+( )
kk kk
vvKuv
++
−
%% %%
(5)
where K is a relaxation gain matrix and is a tuning
parameter.
These steps are repeated until convergence is
reached. Convergence occurs when no further
improvement is observed. In other words, when the
new control is no longer a better candidate than the
previous one and the objective function has reached
its minimum within the possible bounds determined
by the equality and inequality constraints
However, and from the previous cited relations, it
can be seen that the requirement of the ISOPE
algorithm to measure real process output
derivatives with respect to the set-points
*
yv
⎡⎤
∂∂
⎣⎦
%%
to
compute the modifier λ imposes a practical
limitation to the technique. These process
derivatives are calculated online, usually by
applying small perturbations on the set-points and
measure the resulting changes on the outputs. This
process is repeated at each iteration of the algorithm.
Various techniques exist and have been developed
and applied for the purpose of estimating these
derivatives. The Finite differences technique was
originally suggested with the modified two step
method (Roberts, 1979). Dynamic Model
Identification (DMI) using a linear model was then
applied by Zhang and Roberts (1990). An algorithm
for dual control effect was also suggested and
implemented (Brdys and Tatjewski, 1992). Also, a
method based on the well known Broydon Formula
was proposed and tested (Fletcher, 1980). Lately,
DMI with a nonlinear model was proposed and
implemented on a two CSTR system
(Mansour and
Ellis, 2003). In this work, a method based on
Artificial Neural Networks (ANN) to estimate the
real process derivatives and predict future control
actions is presented. In this method, a static neural
network model of the real system is created, trained
and adapted to the behavior of the system. This
model, imitates the behavior of the real system
within its limits. The aim is to use this steady-state
model to estimate the real system output derivatives
with respect to the set-points in order to compute the
parameter λ. All the above techniques are
implemented and tested under simulation on a two
CSTR system.
3 SIMULATIONS AND RESULTS
In order to assess and compare the performances of
the techniques mentioned above, a set of simulations
were carried out on a two Continuous Stirred Tank
Reactors (CSTR) connected in cascade (Garcia and
Morari, 1981). An exothermic autocatalytic reaction
takes place in the reactors with interaction taking
EstimatingRealProcessDerivativesinon-LineOptimization-AReview
121
place in both directions due to a recycle of 50% of
the product stream into the first reactor.
The reaction is:
2
k
k
A
BB
+
−
+⇔
(6)
The manipulated variables which are the set-points
of the temperature controllers in both reactors are:
21
(, )
T
vTT=
. The product concentrations associated
with the second tank are outputs:
22
(,)
T
yCaCb=
.
The objective function for all the simulations using
this system was chosen to be linear of the measured
variable and reflects the desire of maximizing the
amount of component B in tank 2. Thus the form of
the objective function is as follow:
2
(,)
b
H
yv C
=
−
(7)
The simulations were carried out using a
MATLAB
®
/ Simulink platform. The starting point
which is the initial steady-state condition was
chosen to be: T
1
(0)=307 K and T
2
(0)=302 K which
yields the following steady -state outputs:
Ca
2
=0.0141[kmol/m
3
] and Cb
2
=0.0586[kmol/m
3
].
In the simulations, the identification of the
dynamic model within the DMI method (with linear
or non-linear model) was carried out during
transient, once found the updated model was used in
the model-based optimization routine to produce the
new process set-points. The identifier parameters
were chosen as given in Table 1.
Table 1: Tuning the identifier parameters.
Linear Model
Non-linear
Model
Length of data
window
N
d
= 120 N
d
= 60
Model
orders
n
a
= 2, n
b
= 5,
n
c
=1, d = 1
d = 1
Identifier
sampling time
T
s
= 60s T
s
= 60s
Relaxation gain K = 0.03I K = 0.1I
For the neural network scheme, a feedforward back-
propagation neural network composed of eight input
neurons, five hidden layers and two output neurons
was used in the simulation. In a feedforward
network, the first layer has weights coming from the
input. Each subsequent layer has a weight coming
from the previous layer. The last layer is the network
output.
It has to be mentioned that the choice of the
number of layers and their neurons depend totally on
the experimenter. The main factor to be taken into
account is the algorithm behaviour towards the
different values tested. In practice, the algorithm
can be tested with different combinations of layers
in simulations based on robust models of the system.
The optimum (best) choice is then applied on the
real system.
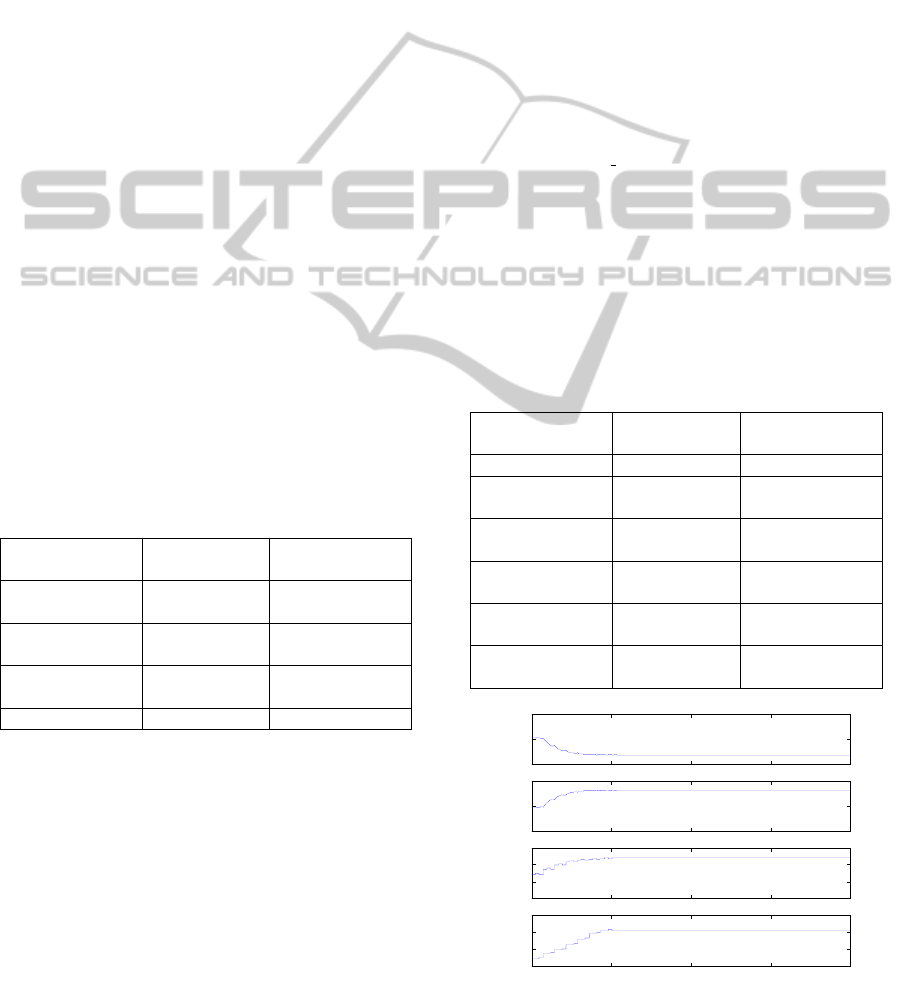
The final converged results of the simulations for
the various techniques are shown in Table 2 and
figures 1 to 6.
Table 2 gives the final objective function value
and the number of set-point changes taken to
converge to the optimum point, obtained using all
the techniques presented in this paper. While the
figures show the trajectories taken by the outputs
and manipulated variables.
We notice that all the methods converge to the
correct process optimum point given by
1
T =312 K
and
2
T =310.2K
, with the optimum objective
function value of -0.0725. From Figures 1 to 6, it is
seen how the changes in the set-points affect the
measured outputs and how they derive their values
from the initial steady-state condition given by
Ca
2
(0)=0.041361 [kmol/m
3
], Cb
2
(0)=0.058638
[kmol/m
3
] to the final desired solution (Ca
2
=0.0275
[kmol/m
3
], Cb
2
=0.0725 [kmol/m
3
]).
Table 2: ISOPE algorithm with the different estimation
techniques.
Objective
function value
Number of set-
point changes
FDAM -0.0725 22
Broydon’s
method
-0.0725 12
Dual control
method
-0.0725 14
DMI with linear
model
-0.0725 12
DMI with non-
linear model
-0.0725 10
Neural network
method
-0.0725 7
Figure 1: FDAM method.
0 0.5 1 1.5 2
x 10
5
0.02
0.04
0.06
Ca2 (kmol/m3)
Time (s)
0 0.5 1 1.5 2
x 10
5
0.04
0.06
0.08
Cb2 (kmol/m3)
Time (s)
0 0.5 1 1.5 2
x 10
5
300
305
310
315
T1 (K)
Time (s)
0 0.5 1 1.5 2
x 10
5
300
305
310
315
T2 (K)
Time (s)
SIMULTECH2012-2ndInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
122
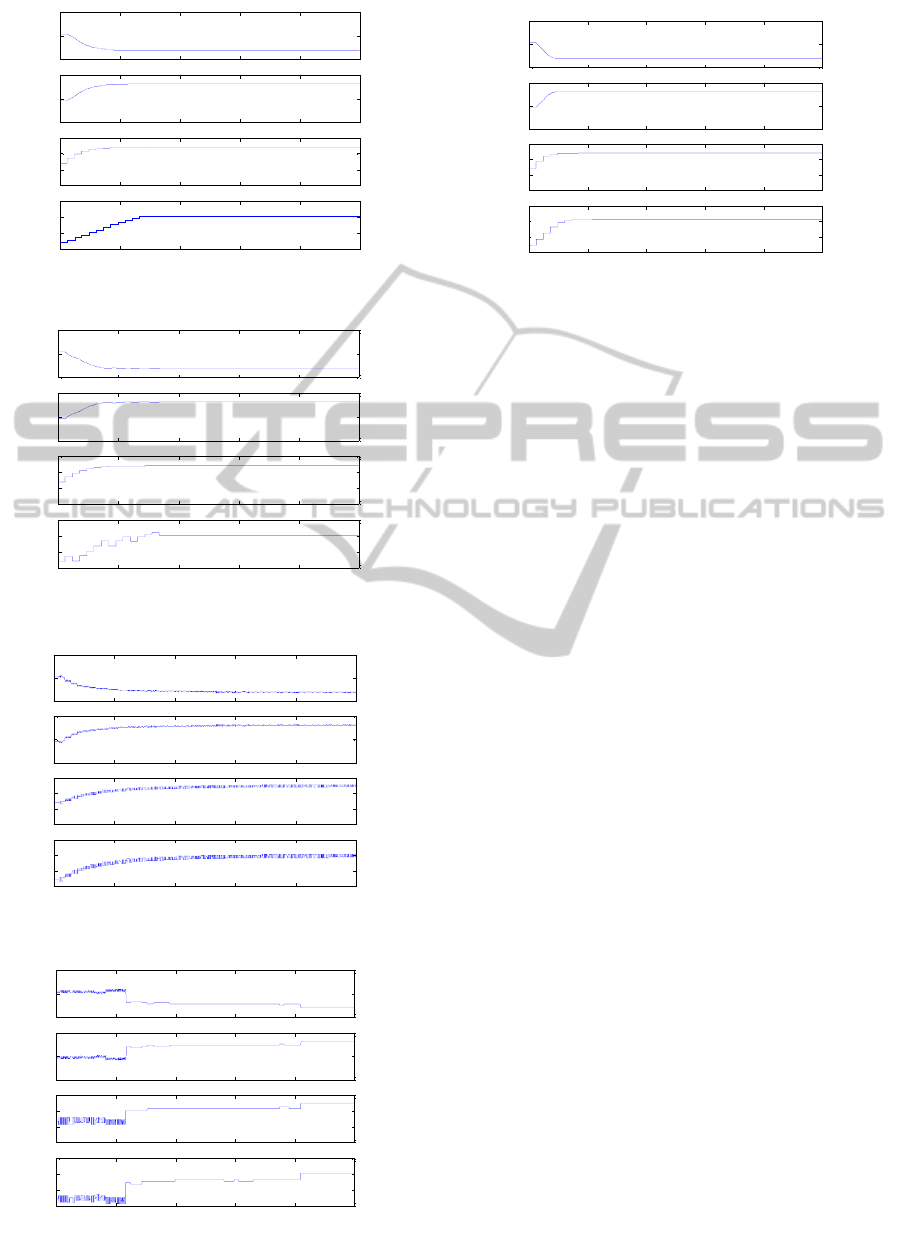
Figure 2: Broydon’s method.
Figure 3: Dual control method.
Figure 4: DMI with a linear model.
Figure 5: DMI with a nonlinear model.
Figure 6: The Neural network method.
4 DISCUSSION AND
CONCLUSIONS
Techniques for estimating real process derivatives to
be used within the ISOPE algorithm have been
reviewed, and applied on a cascade process
consisting of two Continuous Stirred Tank Reactors.
All methods, due to the satisfaction of optimality
conditions, do achieve the real process optimum
provided they can be implemented in a stable
manner after a suitable choice of relaxation gains.
In the case of high order, slow and noisy
processes, the FDAM, is not, as is well documented,
a good choice. Each time a process derivative is
requested, a set-point perturbation needs to be
applied and a measurement time needs to be given to
allow the process to settle before the derivatives are
measured. Additional difficulties are observed when
noise is present on the output measurement. This set-
point perturbation, and the subsequent measurement
time, is where the majority of time is spent in the
algorithm so this is a major consideration in
assessing the algorithm. As can be seen from the
simulation results on the CSTR’s system (Table 2),
the FDAM, approaches twice the number of set-
point changes of the various after methods and
would seem not to be the perfect choice of
algorithm.
The dual control method takes 14 set-point
changes (Table 2) to achieve the optimum in the
CSTR’s simulation. This is still more than the after
methods but the ability of the algorithm to estimate
the derivatives without any excess in the set-point
changes makes it a good choice. It has to be
mentioned that the ISOPE using the dynamic model
identification with a nonlinear model gives better
results than that using a linear one. This is
demonstrated by the number of set-point changes
0 2 4 6 8 10
x 10
4
0.02
0.04
0.06
Ca2 (kmol/m3)
Time (s)
0 2 4 6 8 10
x 10
4
0.04
0.06
0.08
Cb2 (kmol/m3)
Time (s)
0 2 4 6 8 10
x 10
4
300
305
310
315
T1 (K)
Time (s)
0 2 4 6 8 10
x 10
4
300
305
310
315
T2 (K)
Time (s)
0 2 4 6 8 10
x 10
4
0.02
0.04
0.06
Ca2 (kmol/m3)
Time (s)
0 2 4 6 8 10
x 10
4
0.04
0.06
0.08
Cb2 (kmol/m3)
Time (s)
0 2 4 6 8 10
x 10
4
300
305
310
315
T1 (K)
Time (s)
0 2 4 6 8 10
x 10
4
300
305
310
315
T2 (K)
Time (s)
0 2 4 6 8 10
x 10
4
0.02
0.04
0.06
Ca2 (kmol/m3)
Time (s)
0 2 4 6 8 10
x 10
4
0.04
0.06
0.08
Cb2 (kmol/m3)
Time (s)
0 2 4 6 8 10
x 10
4
300
305
310
315
T1 (K)
Time (s)
0 2 4 6 8 10
x 10
4
300
305
310
315
T2 (K)
Time (s)
0 2 4 6 8 10
x 10
4
0.02
0.04
0.06
Ca2 (kmol/m3)
Time (s)
0 2 4 6 8 10
x 10
4
0.04
0.06
0.08
Cb2 (kmol/m3)
Time (s)
0 2 4 6 8 10
x 10
4
300
305
310
315
T1 (K)
Time (s)
0 2 4 6 8 10
x 10
4
300
305
310
315
T2 (K)
Time (s)
0 2 4 6 8 10
x 10
4
0.02
0.04
0.06
Ca2 (kmol/m3)
Time (s)
0 2 4 6 8 10
x 10
4
0.04
0.06
0.08
Cb2 (kmol/m3)
Time (s)
0 2 4 6 8 10
x 10
4
300
305
310
315
T1 (K)
Time (s)
0 2 4 6 8 10
x 10
4
300
305
310
315
T2 (K)
Time (s)
EstimatingRealProcessDerivativesinon-LineOptimization-AReview
123

taken to reach the optimum point which is fewer in
the first method. In this paper and using the CSTR
example, the most suitable method is the neural
network scheme as only 07 set-point changes are
needed in order to converge to the right optimum
point. However, the huge amount of data needed for
training the network is its major drawback.
REFERENCES
Brdys, M. A. and Tatjewski, P., 1994. An algorithm for
steady-state optimizing dual control of uncertain
plants, paper presented at the 1
st
IFAC Workshop on
new trends in design of control systems, September 7 -
10, Smolenice, Slovak Republic, pp 249-254.
Ellis, J. E., Kambhampati, C., Sheng, G. and Roberts,
P.D., 1988. Approaches to the optimizing control
problem, Int. J. of Systems Science, Vol. 19, No. 10,
pp 1969-1985.
Fletcher, R., 1980. Practical Methods of Optimization,
Vol.1, A. Wiley-Interscience Publication.
Garcia, C. E. and Morari, M., 1981. Optimal operation of
integrated processing Systems, AICHE Journal, Vol.
27, No. 6, pp 960-968.
Mansour, M. and Ellis, J. E., 2003. Comparison of
methods for estimating real process derivatives in on-
line optimisation, Applied Mathematical Modeling,
Vol. 27, pp 275-291.
Mansour, M. and Ellis, J. E., 2008. Methodology of on-
line optimization applied to a chemical process,
Applied Mathematical Modeling, Vol. 32, pp 170-184.
Roberts, P. D., 1979. An algorithm for steady-state system
optimization and parameter estimation, Int. J. of
Systems Science, Vol. 10, pp 719-734.
Roberts, P. D, and Williams. T. W. C., 1981. On an
algorithm for combined system optimisation and
parameter estimation, Automatica, Vol. 17, pp 199-
209.
Zhang, H. and Roberts, P.D., 1990. On-line steady-state
optimisation of nonlinear constrained processes with
slow dynamics, Trans Ins MC, Vol. 12, No 5, pp 251-
261.
SIMULTECH2012-2ndInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
124
