
Video Foreground/Background Segmentation using Spatially
Distributed Model and Edge-based Shadow Cancellation
Shian-De Tsai, Jin-Jang Leou and Han-Hui Hsiao
Department of Computer Science and Information Engineering, National Chung Cheng University,
621 Chiayi, Taiwan
Keywords: Video Foreground/Background Segmentation, Spatially Distributed Model, Edge-based Shadow
Cancellation.
Abstract: Video foreground/background segmentation is to extract relevant objects (the foreground) from the
background of a video sequence, which is an important step in many computer vision applications. In this
study, the spatially distributed model is built by a splitting process using Gaussian probability distribution
functions in spatial and color spaces. Then, edge-based shadow cancellation is employed to obtain more
robust segmentation results. The proposed approach can well handle illumination variations, shadow effect,
and dynamic scenes in video sequences. Based on experimental results obtained in this study, as compared
with two comparison approaches, the proposed approach provides the better video segmentation results.
1 INTRODUCTION
Video foreground/background segmentation is to
extract relevant objects (the foreground) from the
background of a video sequence, which is the
important step in many computer vision applications.
Because a video sequence may contain illumination
variations, shadow effect, dynamic scenes, …, video
foreground/background segmentation is a
challenging task.
Existing video foreground/background segmen-
tation approaches include three categories, namely,
thresholding, background subtraction, and motion-
based. The first category of approaches is based on
thresholding pixel differences between two related
frames (two consecutive frames or the current frame
and a background frame). Because segmentation
results are sensitive to thresholding values, various
adaptive thresholding approaches were proposed
(Tsaig and Averbuch, 2002); (Kim and Hwang,
2002).
For the second category of approaches, Heikkila
and Pietikainen (2006) proposed an efficient texture-
based method for background modeling. The local
binary pattern (LBP) texture operator is employed,
which has several good properties for background +
modeling. Zhang et al. (2008) proposed a novel dy-
This work was supported in part by National Science Council,
Taiwan, Republic of China under Grants NSC 98-2221-E-194-
034-MY3 and NSC 99-2221-E-194-032-MY3.
dynamic background subtraction approach based on
the covariance matrix descriptor. The covariance
matrix integrates the pixel-level and region-level
features together and efficiently represents the
correlation between features. Wang et al. (2008)
presented three algorithms (running average, median,
mixture of Gaussian) for modeling the background
directly from the compressed video. Their approach
utilizes DCT coefficients at block level to represent
background, and adapts the background by updating
DCT coefficients. Li et al. (2004) proposed a
Bayesian framework that incorporates spectral,
spatial, and temporal features to characterize the
background appearance. A Bayes decision rule is
derived for classification based on the statistics of
principal features.
For the third category of approaches, motion-
based foreground/background segmentation can be
treated as fitting a collection of motion models to
spatiotemporal image data. Mezaris et al. (2004)
proposed a model-based foreground/background
segmentation approach including three stages: initial
segmentation of the first frame using color, motion,
and position features, a temporal tracking algorithm,
and a trajectory-based region merging procedure.
Wang et al. (2005) proposed a Bayesian network to
model interactions among the motion vector field,
the intensity segmentation field, and the video
segmentation field. The Markov random field is then
89
Tsai S., Leou J. and Hsiao H..
Video Foreground/Background Segmentation using Spatially Distributed Model and Edge-based Shadow Cancellation.
DOI: 10.5220/0004069600890095
In Proceedings of the International Conference on Signal Processing and Multimedia Applications and Wireless Information Networks and Systems
(SIGMAP-2012), pages 89-95
ISBN: 978-989-8565-25-9
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

used to encourage the formation of continuous
regions.
2 PROPOSED APPROACH
In proposed approach, spatial and color information
are used as frame features and the camera is
assumed to be stationary. Each pixel in frame t is
described as a 5-dimensional feature vector
t
x
v
= [x, y,
Y, U, V]
T
, where (x,y) is the pixel coordinate, color is
encoded by the YUV format, and T denotes
transpose. The probability distribution function of
t
x
v
for model component j is given by:
,
)2(
)|(
),(
)())((
2
1
),(),(
),(
1
),(),(
tj
d
xx
tjtjt
tjttjtjt
e
xp
Σ
=
−Σ−−
−
π
ωθ
μμ
vv
v
(1)
where the parameters θ
(j, t)
= {ω
(j, t)
, μ
(j, t)
, Σ
(j, t)
} are
the weight, mean, and covariance matrix of model
component j in frame t, and the dimensionality d is 5.
As shown in Figure 1, a spatially distributed
background model, a Gaussian foreground detection
process, and edge-based shadow cancellation are
employed in the proposed approach.
2.1 Building the Background Model
To remove noise and tune the boundaries of
foreground objects, the Gaussian smoothing filter is
applied on each video frame, which is described as:
22
2
2
2
1
(, ) .
2
xy
Gxy e
σ
πσ
+
−
=
(2)
The background model is initialized, based on the
first video frame of a video sequence. It is assumed
that no foreground objects appear in the first frame.
Then, an iterative splitting procedure, namely,
principal direction divisive partitioning (PDDP)
(Boley, 1998) is employed to initialize background
component(s).
Initially, the whole background frame is treated
as a single component, and the support map value of
each background pixel is set to 1. Then, a single
iteration of the splitting procedure divides each
existing component into two new components.
Given the background frame and the current
components, each component having the highest
spatial variance will be determined. Here, it is
assumed that the spatial and color distributions are
independent. Using the spatial covariance matrix of
each component, the eigenvalue
s
j
λ
and the
corresponding eigenvector
s
j
v
of component j with
spatial distribution s can be computed. The splitting
component
s
sp
C
is given by
}.{maxarg
s
jj
s
sp
C
λ
=
(3)
If
s
sp
s
sp
T>
λ
, where
s
sp
T
is a predefined threshold, then
the splitting component is split and a new
component is generated and reassigned as the pixels
x
v
of the splitting component which satisfy
,0)( >⋅−
s
sp
s
sp
s
vx
μ
v
(4)
where
s
sp
μ
is the spatial mean of the splitting
component
s
sp
C
. That is to place a separating plane
through the spatial mean, perpendicular to
s
sp
v
. The
parameter sets of two corresponding components are
then re-estimated based on their newly assigned
pixels, respectively, and the support map value of
each pixel is updated correspondingly. The proposed
approach applies the splitting procedure on both the
spatial and color component frames. The splitting
procedure will be iterated until the largest
eigenvalue of a splitting component is smaller than a
threshold.
Because a component may contain two or more
spatially disconnected regions, which should be split.
Here, the connected component algorithm (Haralick
and Shapiro, 1992) is employed to further split a
component containing two or more spatially
disconnected regions. The initial background model
is thus completely constructed for the background.
For a subsequent frame, each pixel
t
x
v
is assigned
to the most likely model component, i.e., each pixel
can be assigned to the component with the
maximum posterior probability C
map
defined as
))}.|({log(maxarg
jtjmap
xpC
θ
v
=
(5)
Because the spatial and color distributions are
assumed to be independent, the distribution function
in Eq. (5) can be re-expressed as the function of a 2-
D spatial Gaussian and a 3-D color Gaussian with
parameter sets
s
j
θ
and
c
j
θ
for the spatial vector
Ts
t
yxx ],[=
v
and the color vector
Tc
t
VUYx ],,[=
v
,
respectively. Hence, C
map
can be modified as
))}.|(log())|({log(maxarg
c
j
c
j
s
j
s
jjmap
xpxpC
θθ
v
v
+=
(6)
The support map value of each pixel of the new
frame is updated to respond the new assignment.
Additionally, to obtain stable assignments, a pixel
can only be assigned to a background component if
,))|((log
s
lik
s
j
s
t
Txp >
θ
v
(7)
where
s
lik
T
is a predefined threshold.
SIGMAP2012-InternationalConferenceonSignalProcessingandMultimediaApplications
90

Next, to detect new foreground object(s) in the
new frame, the “unassigned” pixels in the support
map should be detected. Here, if pixel
t
x
v
of a
component satisfies
,))|((log
unassignCt
Txp
map
≤
θ
v
(8)
where T
unassign
denotes a minimum probability
threshold, then
t
x
v
is determined as an “unassigned”
pixel.
2.2 Foreground Detection and
Introducing Foreground Model
Initially, all the initial model components of a frame
are labeled as the background. A foreground
component is detected when some region of pixels
having a low probability under the mixture model.
Such a region appears in the support map as a region
having high density of “unassigned” pixels. The
support map is divided into nonoverlapping blocks
of size 16×16 pixels. For a block, if the number of
“unassigned” pixels exceeds a threshold T
d
, it is
detected as a “foreground” block. Initially, a single
foreground component is built for all unassigned
pixels in these “foreground” blocks. Then, similar to
the background model, the splitting procedure is
recursively applied to build the foreground model.
After pixel assignment and foreground detection,
the parameters of both background and foreground
components of a frame are re-estimated. Given the
parameters of the previous frame
,
)1,( −tj
θ
the new
parameters
),( tj
θ
of the current frame can be
computed (using an adaptive learning rate) as
,)-(1
)1,(),(),( −
+=
tjjCmapjjtj
αα
θθθ
(9)
where α
j
is a vector of learning rates updated by a
variable factor
,
w
j
α
which is proportional to the area
fraction of each foreground/background component
within a frame.
2.3 Edge-based Shadow Cancellation
After foreground detection, the initial foreground
mask FM
t
of frame t usually contains both moving
objects and some shadows. A shadow often appears
in an area where the pixel (gray-level) values change
“gradually” from the background to the shadow
region. Here, the Canny edge detector (Canny, 1986)
is used to generate a binary edge map CE
t
of frame t,
where “1” denotes the edge and “0” denotes
otherwise.
Using the binary edge maps of 5 successive
frames, the integrated Canny edge map ICE
t
is
defined as
⎪
⎩
⎪
⎨
⎧
===
=
=
. otherwise, edge, moving
,1)()()( if edge, static
,0)( if edge,not
)(
5-3-
xCExCExCE
xCE
xICE
ttt
t
t
vvv
v
v
(10)
where
x
v
denotes a pixel.
Based on ICE
t
and FM
t
of frame t, the moving
Canny edge MCE
t
can be defined as
},
edge,Canny moving)(|{
t
tt
FMx
xICExMCE
∈
==
v
v
v
(11)
whereas the edges of the foreground mask EFM
t
can
be defined as
}.) ,NG(
, ,|{
truexx
FMxFMxxEFM
ttt
=
′
∉
′
∈=
vv
v
v
v
(12)
where NG(
x
v
, x
′
v
) is a logic function that returns true
when
x
v
and
x
′
v
are 4-connected neighbors. Note that
MCE
t
provides important information for seed point
selection in region growing (as an illustrated
example shown in Figure 2). Because some gaps
exist in moving Canny edges MCE
t
, in this study,
morphologic dilation with a 3×3 structure element is
applied on MCE
t
, resulting in DMCE
t
.
Because region growing is used to detect shadow
regions, some seed points are required. The shadow
region edges SRE
t
in FM
t
may be employed as seed
points, which can be defined as
}, ,-min
,|{
tsre
tt
MCExTxx
EFMxxSRE
∈
′
>
′
∈=
vvv
v
v
(13)
where T
sre
is a threshold confining the searching
neighbor and ||•|| denotes the Chebyshev distance.
Additionally, SRE
t
also contains some sporadic
pixels (the edges of moving objects). To remove
sporadic pixels, the connected component algorithm
(Haralick and Shapiro, 1992) is also used to connect
initial seed points. Each connected region with its
number of pixels more than a threshold T
seed
is
included in the final shadow region edges
.
final
t
SRE
The pixels in
final
t
SRE
serve as seed points of the
region growing algorithm (Adam and Bischof, 1994)
used for shadow detection, which are expanded pixel
by pixel in FM
t
, resulting in the detected shadow
.
shadow
t
FM
Note that the pixels in DMCE
t
should not
be included in
shadow
t
FM
(as an illustrated example
shown in Figure 3).
Based on FM
t
and
,
s
hadow
t
FM
the initial moving
object MO
t
(obtained as
shadow
ttt
FMFMMO −=
)
VideoForeground/BackgroundSegmentationusingSpatiallyDistributedModelandEdge-basedShadowCancellation
91

contains some noisy pixels and holes, which will be
processed by a post-processing procedure. In the
post-processing procedure, to remove noisy pixels
and holes, morphologic erosion with a 3×3 structure
element is first applied on MO
t
, then the connected
component algorithm (Haralick and Shapiro, 1992)
is used to remove small connected regions with
threshold T
sre
, and finally morphologic dilation with
a 3×3 structure element is applied to obtain the final
foreground/background segmentation results (as an
illustrated example shown in Figure 4).
3 EXPERIMENTAL RESULTS
In this study, 12 test video sequences and the
corresponding ground truth hand segmentations are
employed. They are “Office,” “Outdoor,” “Browse1,”
“LightSwitch,” “NightCar,” “IntelligenRoom,”
“ParkingLot,” “OneLeaveShopReenter,”
“WavingTree1,” “WavingTree2,” “Raining,” and
“Boat.” Here, sequences 1-3 contain some gradual
illumination variations, whereas sequence 4 contains
great illumination variations. Sequences 5-8 contain
both gradual illumination variations and shadow
effect. Finally, sequences 9-12 contain some
dynamic scenes, such as waving tree, raining, and
moving water. To evaluate the effectiveness of the
proposed approach, two comparison methods,
namely, self-organizing background subtraction
(SOBS) (Maddalena and Petrosino, 2008) and
spatially distributed model (SDM) (Dickinson et al.,
2009) are implemented in this study. The parameter
values and thresholds used in the proposed approach
are listed in Table 1, which are empirically
determined in this study.
To evaluate the performance of the three
comparison approaches, the Jaccard coefficient J
c
by
Rosin and Ioannidism (2003) and the total error
(E
tot
) by Toyama et al. (1999) are employed. A pixel
being classified as “foreground” by both the
approach and the ground truth is denoted as “true
positive” (TP). If it is classified as “foreground” by
only the approach, it is denoted as “false positive”
(FP). If it is classified as “foreground” by only the
ground truth, it is denoted as “false negative” (FN).
If TP, FP, and FN denote the numbers of “true
positive,” “false positive,” and “false negative”
pixels in a video sequence, respectively, then
,
)( FNFPTP
TP
J
c
++
=
(14)
.FNFPE
tot
+=
(15)
In Figure 5, as compared with two comparison
approaches, the proposed approach can handle video
sequences containing shadow effect and gradual
illumination variations, whereas in Figure 6, as
compared with two comparison approaches, the
proposed approach can handle video sequences
containing dynamic scenes, such as waving tree,
raining, and moving water.
Additionally, in terms of two performance
indexes, namely, Jaccard coefficients and total errors
listed in Table 2, the performance of the proposed
approach is better than those of two comparison
approaches.
4 CONCLUDING REMARKS
In this study, a video foreground/background
segmentation approach using spatially distributed
model and edge-based shadow cancellation is
proposed to deal with video sequences containing
illumination variations, shadow effect, and dynamic
scenes. Based on the experimental results obtained
in this study, as compared with two comparison
methods, the proposed approach provides the better
video segmentation results.
REFERENCES
Adam, R. and Bischof, L., 1994. Seeded region growing.
IEEE Trans. on Pattern Analysis and Machine
Intelligence, 16(6), 641-647.
Boley, D., 1998. Principle direction devisive partitioning.
Data Mining and Knowledge Discovery, 2(4), 325-344.
Canny, J. F., 1986. A computational approach to edge
detection. IEEE Trans. on Pattern Analysis and
Machine Intelligence, 8(11), 679-698.
Dickinson, P., Hunter, A., and Appiah, K., 2009. A
spatially distributed model for foreground
segmentation. Image and Vision Computing, 27(9),
1326-1335.
Haralick, R. M. and Shapiro, L. G., 1992. Reading, MA:
Addision-Wesley. Computer and Robot Vision, 28-48.
Heikkila, M., Pietikainen, M., and Member, S., 2006. A
texture-based method for modeling the background
and detecting moving objects. IEEE Trans. on Pattern
Analysis and Machine Intelligence, 28(4), 657-662.
Kim, C. and Hwang, J. N., 2002. Fast and automatic video
object segmentation and tracking for content-based
applications. IEEE Trans. on Circuits and Systems for
Video Technol., 12(2), 122-129.
Li, L. et al., 2004. Statistical modeling of complex
backgrounds for foreground object detection. IEEE
Trans. on Image Process., 13(11), 1459-1472.
Maddalena, L. and Petrosino, A., 2008. A self-organizing
approach to background subtraction for visual
SIGMAP2012-InternationalConferenceonSignalProcessingandMultimediaApplications
92

surve
Proc
e
Mezaris,
Vide
o
temp
o
IEEE
Tech
n
Rosin, P.
imag
e
R
eco
g
Toyama,
1999.
b
ack
g
on C
o
Tsaig,
Y
segm
e
regio
n
Syste
m
Wang,
W
back
g
comp
Syste
m
Wang, Y
.
b
ase
d
Proc
e
Zhang,
S
dyna
m
Conf.
APPE
Figure 1
segment
a
illance applic
a
e
ss., 17(7), 116
8
V., Kompatsi
a
o
object se
g
o
ral tracking a
n
E
Trans. on
C
n
ol., 14(6), 782
and Ioannidis
m
e
thresholdin
g
g
nition Letters,
K., Krumm,
J
Wallflower:
g
round mainte
n
o
mputer Vision
,
Y
. and Av
e
e
ntation of mo
v
n
labeling appr
o
m
s for Video T
e
W
., Yang, J.,
g
round and s
e
p
ressed video.
m
s for Video T
e
.
et al., 2005.
S
d
on graphical
e
ss., 14(7), 937
-
S
. et al., 2008
.
m
ic backgroun
d
on Pattern Re
c
NDIX
: The propos
e
a
tion approach.
a
tions. IEEE
8
-1177.
a
ris, I., and Str
i
g
mentation
u
n
d trajectory-
ba
C
ircuits and
S
-795.
m
, E., 2003.
E
g
for change
24(14), 2345-
2
J
., Brumitt, B
principles
n
ance. in Proc.
,
255-261.
e
rbuch, A.,
v
ing objects in
o
ach. IEEE Tr
a
e
chnol., 12(7),
5
and Gao, W
e
gmenting mo
v
IEEE Trans.
e
chnol., 18(5),
6
S
patiotemporal
models. IEE
E
-
947.
.
A covarianc
e
d
subtraction. i
n
c
ognition, 1-4.
e
d video for
e
Trans. on I
m
i
ntzis, M. G.,
2
u
sing Bayes-
b
a
sed region me
r
S
ystems for
V
E
valuation of g
l
detection. P
a
2
356.
., and Meyers
and practice
of IEEE Int.
C
2002. Auto
m
video sequen
c
a
ns. on Circuit
s
5
97-612.
., 2008. Mod
e
v
ing o
b
jects
on Circuits
6
70-681.
video segment
a
E
Trans. on I
m
e
-
b
ased metho
d
n
Proc. of IEE
E
e
ground/backgr
o
m
age
2
004.
b
ased
r
ging.
V
ideo
lobal
a
ttern
, B.,
of
C
onf.
m
atic
c
es: a
s
and
eling
from
and
ation
m
age
d
for
E
Int.
ound
Fig
u
EF
M
F
Fi
g
(a) Frame
4
(c) MCE
4
6
u
re 2: (a) Fra
m
M
46
.
(a) DMCE
4
(c)
f
in
a
SRE
46
F
igure 3: An il
l
(b)
s
ha
d
FM
46
g
ure 4: An illu
s
4
6
m
e 46, (b) IC
E
4
6
a
l
l
ustrated exam
p
(a) FM
46
d
ow
trated example
(b) ICE
46
(d) EFM
46
CE
46
, (c) MCE
4
(b) SRE
46
(d)
s
had
o
FM
46
p
le of region g
r
(c) MO
46
e
of shadow ca
n
4
6
, and (d)
o
w
r
owing.
n
cellation.
VideoForeground/BackgroundSegmentationusingSpatiallyDistributedModelandEdge-basedShadowCancellation
93
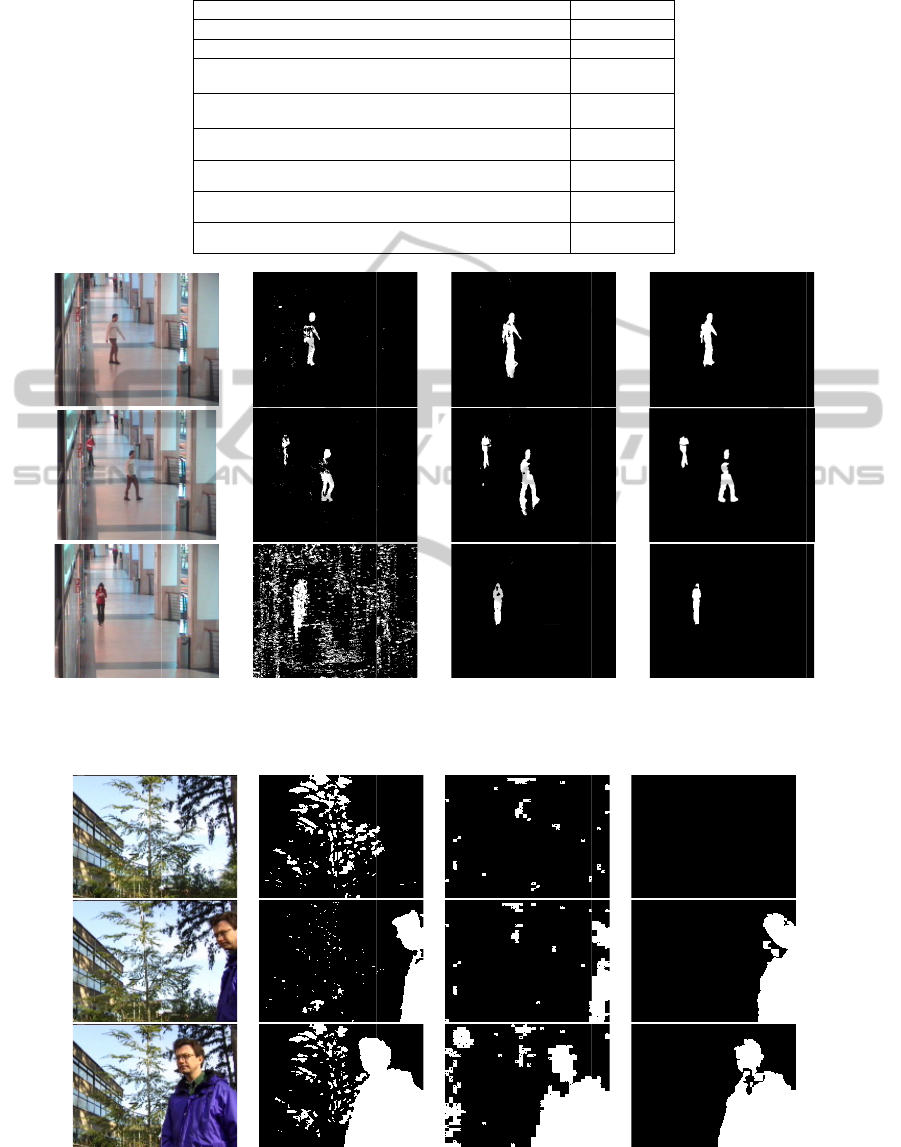
Figure 5
:
segment
a
Figure 6:
results b
y
(a)
:
Experimenta
l
a
tion results by
(a
)
Experimental
y
SOBS, SDM,
Table 1: Para
m
Max back
g
Max fore
g
s
sp
T
for b
a
c
sp
T
for b
a
s
lik
T
for b
d
T
for u
n
sre
T
for s
e
seed
T
for
l
results of se
q
SOBS, SDM,
a
)
results of seq
u
and the propos
m
eter values a
n
Parameters
a
g
round compone
n
g
round compone
n
a
ckground split (
s
a
ckground split (
c
a
ckground spati
a
n
assigned pixel d
e
e
arching neighb
o
minimum seed p
(b)
q
uence “OneL
e
a
nd the propose
(b)
u
ence “Wavin
g
e
d approach, r
e
n
d thresholds u
s
a
nd thresholds
n
ts
n
ts
spatial)
c
olor)
a
l likelihoo
d
e
nsity
or
p
oin
t
eaveShopReen
t
e
d approach, re
s
g
Tree1.” (a) O
r
e
spectively.
s
ed in the prop
o
(c)
t
er.” (a) Origi
n
s
pectively.
(c)
r
iginal video
fr
o
sed approach.
Values
300
250
800
50
2.4×10
-8
0.8
2
30
n
al video fra
m
r
ames 10, 19,
(d)
m
es 47, 61, 2
0
(d)
21; (b)-(d) se
g
0
1; (b)-(d)
g
mentation
SIGMAP2012-InternationalConferenceonSignalProcessingandMultimediaApplications
94

Table 2: Jaccard coefficients and total errors of 12 test sequences by SOBS, SDM, and the proposed approach (Proposed).
Sequence
Jaccard coefficient Total errors (
×
10
3
)
SOBS SDM Proposed SOBS SDM Proposed
Office 0.43 0.41 0.47 13.4 15.7 13.6
Outdoor 0.41 0.46 0.43 18.6 15.0 15.2
Browse1 0.47 0.43 0.54 17.3 18.6 14.3
LightSwitch 0.28 0.23 0.41 21.6 25.5 13.5
NightCar 0.34 0.39 0.41 15.4 13.2 11.2
IntelligenRoom 0.68 0.71 0.78 10.3 8.6 5.5
ParkingLot 0.56 0.47 0.54 15.4 18.6 16.7
OneLeaveShopReenter 0.32 0.41 0.48 16.8 12.3 8.5
WavingTree1 0.23 0.52 0.68 18.3 10.4 7.3
WavingTree2 0.23 0.54 0.62 19.7 11.9 9.8
Raining 0.34 0.42 0.47 18.6 15.4 11.9
Boat 0.29 0.43 0.53 15.5 14.3 11.3
Average
0.38 0.45
0.53
16.7 14.9
11.6
VideoForeground/BackgroundSegmentationusingSpatiallyDistributedModelandEdge-basedShadowCancellation
95
