
Indoor Location Estimation in Sensor Networks using AI Algorithm
J´ozsef D´aniel Dombi
Department of Software Engineering, University of Szeged,
´
Arpad t´er 2., Szeged, Hungary
Keywords:
Indoor Location and Tracking, Sensor Network, Fingerprinting, Machine Learning.
Abstract:
To determine the indoor location of a person or object, we can use a suitable wireless network. There are
different kinds of wireless networks available for this. Independent of the type of the network, using RSSI
it is possible to find the position of the moving person close by. Here, we present Wireless Sensor Network
and apply it in a real environment. We will mainly concentrate on locating a person using standard artificial
intelligence methods. In our system we define nodes (the fingerprint), and supervised learning algorithms that
should predict these nodes. In addition, we test whether we can get nice results if we change the granularity of
the nodes. Real simulation demonstrates that this system can supply the current position of the moving person
with good accuracy.
1 INTRODUCTION
Here, a locating system is used for tracking and defin-
ing the current position of a person or object. The
most important distinguishing feature of such a sys-
tem is the type of wireless communication used, and
the application information presented to the user. The
granularity of the position can vary from one applica-
tion to another. For example, finding out whether a
person is in a room requires less information, while
locating a person who is sitting in front of a desk re-
quires more accurate information.
Therefore, many different systems and technolo-
gies have been proposed. GPS devices are avail-
able for everyday use in modern outdoor applications
(Enge and Misra, 1999). The GPS system has a lim-
ited accuracy, and can be used where satellites are
”visible”, because buildings block the GPS transmis-
sions. The earliest investigation for indoor position-
ing was done by Bahl et al. who observed that an RF
signal source exhibits spatial variation, but is consis-
tent in time. They created a system called Radar (Bahl
and Padmanabhan, 2000). They used four 802.11 ac-
cess points to locate a laptop at its true position to an
accuracy of 2-3 meters. Since then, there have been a
lot of improvements in Radar’s fingerprint matching
algorithms (Agrawala and Shankar, 2003) (Haeberlen
et al., 2004) (Ladd et al., 2005).
These studies showed that the Received Signal
Strength Indicator (RSSI) has a larger variation be-
cause it is subject to the detrimental effects of fading
and shadowing.
Other techniques, such as Active Badge (Hopper
et al., 1993) and a commercial system like Versus
(Versus, 2012), use infrared emitters and detectors
to achieve an accuracy of 5-10m. Active Bet (Har-
ter et al., 1999) (Ward and Jones, 1997) and Cricket
(Priyantha et al., 2000) combine the RF and ultra-
sound signal to estimate the distance. These sys-
tems have accuracies ranging from a few meters to a
few centimeters. In a commercial system (Ubisense,
2012), ultra-wideband emitters and receivers have
been used to realize indoor locations.
In this study we use a wireless sensor network.
If a large number of sensors are deployed, the net-
work can monitor large areas. We can apply a sen-
sor network in a variety of situations like those for
monitoring the environment. Sensor nodes can mea-
sure temperature, a heartbeat, humidity and so on.
However, collecting a large amount of data leads to
an increase in traffic and in the energy consumption
of sensors. Moreover, increasing the data collection
time has a negative impact on the location data col-
lection method. In a wireless sensor network it is vi-
tal to keep the energy consumption low. Our Sensor
Network protocol is similar to the ZigBee (ZigBee,
2012) protocol, which includes IEEE 802.15.4 for
MAC and PHY. Here, we implemented a positional
estimation technique based on standard artificial in-
telligence methods using RSSI in a sensor network
and evaluated its position-estimation ability. The re-
mainder of this paper is organized as follows. Sec-
349
Dombi J..
Indoor Location Estimation in Sensor Networks using AI Algorithm.
DOI: 10.5220/0004098303490352
In Proceedings of the 14th International Conference on Enterprise Information Systems (ICEIS-2012), pages 349-352
ISBN: 978-989-8565-10-5
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

tion 2 outlines the standard AI methods, then Section
3 describes the experimental setup. After, Section 4
presents the result of our experiments. In the last sec-
tion, we summarize our findings and draw some per-
tinent conclusions.
2 AI METHODS
In our system the signal strengths are got by a router.
Currently, different routers send the RSSI to the PC.
More than three RSSI values are used to determine
the position of the node inside the building. First, we
have to investigate the relationship between the dis-
tance and signal strength from a given router point. If
one knows the distances from a node to at least three
different routers, one can calculate the position of the
node in the system.
In a real environment the power received is a very
complex function of distance. Even if a good model is
available to determine the position of the node, it still
requires a lengthy calculation. Hence, the location
of the RSSI is more complicated and it is harder to
solve. In our model, we simplify the system. We do
not worry about calculating the exact position of the
object. For us, it is sufficient to determine the nearest
node (fingerprint).
Standard artificial intelligence methods offer a
good solution for estimating the location and reduc-
ing the distance error. Here, we implemented the de-
cision tree model and neural network model. An ex-
act knowledge of the position is not required by either
method. We can train and use the methods without
asking for it. Both methods have good classification
capabilities and are suitable for our purpose, where
we wish to determine the location that best matches
the observed signal strength data.
Using a decision tree means we have to generate
all possible decision trees that correctly classify the
training set and then choose the simplest one. The
number of such trees is finite, but very large. One
of the most widely used decision tree method is ID3
(Quinlan, 1986). It constructs the simple decision
tree, but this approach cannot guarantee that better
trees have not been overlooked. The basic structure
of ID3 is iterative. The window, which is a subset of a
training set, is chosen at random and a decision tree is
formed from it. ID3 examines all candidate attributes
and chooses attribute A to maximize the gain. This
tree correctly classifies all objects in the window. All
other objects are then classified using the tree. If the
tree returns the correct answer for all these objects, it
is then correct for the entire training set and the pro-
cess terminates. If not, a selection of the incorrectly
classified objects is added to the window and the pro-
cess continues. Recent articles (Yim, 2008) have ex-
amined how a decision tree works in a location system
based on a fingerprint, and it is found that the accu-
racy of the decision tree is no worse than a Neural
Network or Bayesian system.
A neural network is capable of representing the
relationship between the inputs (signal strengths) and
outputs (nodes). The learning strategy should calcu-
late the free parameters of the model (also called the
”weights” of the network). Here, the standard multi-
layer perceptron (MLP) is implemented. The archi-
tecture of MLP is organized as follows: the signals
flow sequentially through the different layers from the
input to the output layer. For each neuron, it first cal-
culates a scalar product between a vector of weights
and the vector given by the output of the previous
layer. A transfer function is then applied to the result
to produce the input for the next layer. A commonly
applied transfer function is the sigmoid function. In
a single hidden layer, if the number of hidden layers
is sufficiently large then any continuous function can
be approximated to some desired accuracy. Roberto
Battiti et al. (Battiti et al., 2002) examined how a neu-
ral network might be used to locate an object. They
found that with MLP it is possible to determine the
position of the person within 1.82 meters.
In our study, we compare the performance of both
methods to see how well they determine the location
of an object in a sensor network environment.
3 EXPERIMENTAL SETUP
Our experimental testbed is located on the first floor
of a 2-storey building. We define nodes (position of
the fingerprint), and the distances between the nodes
are equal, namely a distance less than 2 m. Part of
the layout of the floor and position of fingerprint are
shown in Figure 1. In the tests, we employed a special
type of sensor network called RTLS (RTLS, 2012).
We placed four routers per room and two on the cor-
ridor at the locations indicated in Figure 2.
Figure 1: Map of the floor and position of each fingerprint.
ICEIS2012-14thInternationalConferenceonEnterpriseInformationSystems
350
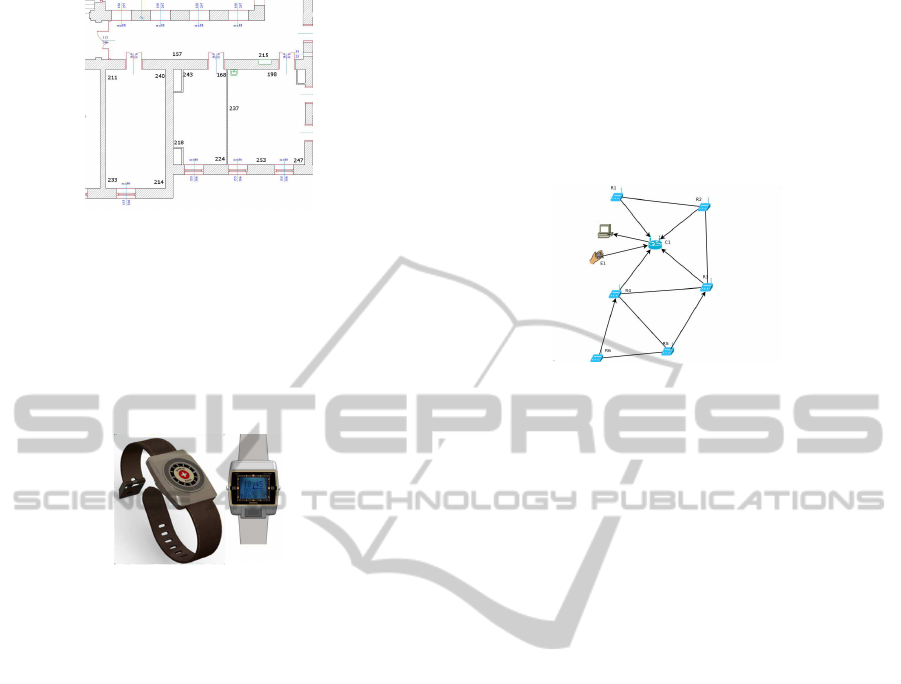
Figure 2: The position of routers inside the building.
In this figure, routers are represented by numbers
(i.e.: 211, 240, 243, 168, etc.) and we see that the
position of each router is usually in the corner of a
room. Users wear a transmitter (also called a tag) de-
vice on their wrist as a watch (see Figure 3, which has
a unique ID called the address.
Figure 3: Two different kinds of watch. Both of them func-
tion as a sensor.
The tag can measure and transmit the temperature
and battery level; and, of course, the routers can mea-
sure the RSSI value. It is also possible to send audio
data through this sensor network.
By default, the tag will send a broadcast message
every 4 seconds. When a router gets a message it can
transmit this data to the coordinator (zero in Figure
4, a special router). The packet received by the co-
ordinator contains the address of the measured tag,
the RSSI value measured by the router, and any other
data measured by the tag. In this network there is a
time delay in the routers. The routers wait for a while
to receive RSSI values, then they aggregate them and
transmit this data to the coordinatoras a single packet.
There is a size limit of the packet so in this way the
router should be able to send a packet to coordina-
tor every 400 milliseconds. The aggregated package
contains only the latest RSSI value received from the
tag. As we mentioned above, the coordinator can re-
ceive packets from different routers and it forwards
them to a PC. The program running on this PC can
collect the RSSI values. The primary task of the pro-
gram is to determine which measurement belongs to
the given tag at any one time. Our network is self-
organized. This means that a tag can communicate
with the routers and these routers send the received
information on to the next router, which is closer to
the coordinator and is connected to the PC. A tag tries
to reach the nearest router, and if it cannot commu-
nicate with this router then it will search for another
router. Figure 4 shows how communication is estab-
lished and maintained. In this figure we can see that
there is coordinator (C1), which is connected to the
PC and there are six routers and a Tag (E1).
Figure 4: Communication between routers and tags.
We generated a fingerprint by performing calibra-
tion measurements. For each node, we measured over
20 values in a second and stored the RSSI values ob-
tained by the router. These were the reference values
that were used for testing the system.
4 RESULTS
As mentioned previously, we tested the AI methods
on a first floor of a building. We positioned the
routers and coordinator. First we had to collect sam-
ples and then we used the cross-validation method.
This method partitions a given data sample into com-
plementary subsets. Then we performed an analysis
on one subset (called the train set), and validated our
analysis on the other subset (called the test set). Mul-
tiple rounds of cross-validation were performed using
different partitions, and the average over the rounds
was the result of the validation.
It should be noted that the objective of our train-
ing algorithm was to build a model with good gener-
alization capabilities when it was tested with values
not present in the train set. The number of parame-
ters and the length of the train phase determined the
goodness of the generalization.
In a real environment it may happen that the given
tag cannot reach the router (missing value). In that
case, we define the worst RSSI value. In addition we
define a new attribute that contains this information.
When the value is one, the router receives a signal,
and when the value is zero, the router doesn’t receive
an RSSI value of the given time. The maximum value
of RSSI that we measured was -54dBm and minimum
value was -90 dBm. For each measurement, out of 14
routers 6 on average send a message saying that they
IndoorLocationEstimationinSensorNetworksusingAIAlgorithm
351
receive an RSSI value, and only 3 routers on average
can measure valuable RSSI values - which means that
they can measure values better than -85 dBm. We cre-
ated different kinds of tests which varied the granular-
ity of the nodes: single position, triple position, and
the room. Single position means that we would like
predict the current position of the object. Triple posi-
tion means that we aggregated 3 nearest node values
into one, and we tried to predict this new position.
In this case, we were only interesed in locating the
object in a certain part of the room. Room position
means that we merged all the node values in the room
into a single node in order to locate the object. The
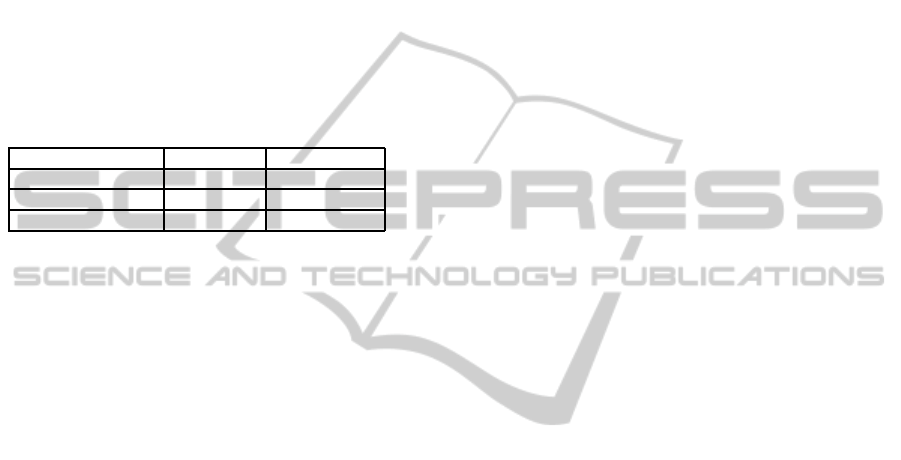
results are shown in the following table.
Table 1: The results of the methods.
Granularity of nodes Decision tree Neural network
Single Position 38% 40%
Triple position 65% 53%
Room 91% 89%
As we see, the two methods have a similar per-
formance in most cases. The percentage value tells
us the degree of certainty of location an object. We
tried different kinds of parameter input for the two
learning methods and we obtained similar results. In
the decision tree, we get the whole tree and examine
the decisions. The decision tree has an average size of
250 and an average number of leaves around 125. The
time needed for the learning method and the evalua-
tion of the values is less for a tree than that for a neural
network.
5 CONCLUSIONS
Many indoor positioning methods have been pub-
lished that can be used in a variety of situations. For
any kind of wireless network, the fingerprint method
is the most commonly used approach. Previous stud-
ies showed that AI algorithms can perform well in lo-
cating an object. These studies used different types
of networks. In this paper we compared two different
kinds of AI method in a wireless sensor environment,
which is similar to the ZigBee network. The band-
width of this network is very low, but it can transmit
audio and data measurements in real time with just
one radio chip. We carried out different kinds of tests
using this wireless sensor network, and we discovered
that in most cases the decision tree and neural network
approaches have a similar performance. When we in-
crease the granualty of the nodes, we get much better
results in terms of accuracy.
ACKNOWLEDGEMENTS
The study presented here was supported by the Hun-
garian national grant GOP-1.1.1-07. I would like to
thank
´
Akos Kiss for his valuable advice, and also
P´eter Kenderesi, P´eter Moln´ar and Bal´azs Szab´o for
providing position data.
REFERENCES
Agrawala, A. K. and Shankar, A. U. (2003). WLAN loca-
tion determination via clustering and probability dis-
tributions. In PerCom.
Bahl, P. and Padmanabhan, V. N. (2000). RADAR: An in-
building RF-based user location and tracking system.
In INFOCOM.
Battiti, R., Villani, A., Villani, R., and Nhat, T. L. (2002).
Neural network models for intelligent networks: De-
riving the location from signal patterns. In Citeseer.
Enge, P. and Misra, P. (1999). Special issue on gps: The
global positioning system. In Proceedings of the of
the IEEE.
Haeberlen, A., Flannery, E., Ladd, A. M., Rudys, A., Wal-
lach, D. S., and Kavraki, L. E. (2004). Practical
robust localization over large-scale 802.11 wireless
networks. In Proceedings of the 10th Annual Inter-
national Conference on Mobile Computing and Net-
working.
Harter, A., Hopper, A., Steggles, P., Ward, A., and Webster,
P. (1999). The anatomy of a context-aware applica-
tion. In Proceedings of the Fifth Annual ACM/IEEE
International Conference on Mobile Computing and
Networking (MobiCom-99).
Hopper, A., Harter, A., and Blackie, T. (1993). The active
badge system. In INTERCHI’93 Conference on Hu-
man Factors in Computing Systems.
Ladd, A. M., Bekris, K. E., Rudys, A., Kavraki, L. E., and
Wallach, D. S. (2005). Robotics-based location sens-
ing using wireless ethernet. Wireless Networks.
Priyantha, N. B., Chakraborty, A., and Balakrishnan, H.
(2000). The cricket location-support system. In MO-
BICOM.
Quinlan, R. (1986). Induction of decision trees. Machine
Learning, 1.
RTLS (2012). Rtls. http://www.rtls.eu.
Ubisense (2012). Ubisense. http://www.ubisense.net.
Versus (2012). Versus. http://www.versustech.com.
Ward, A. and Jones, A. (1997). A new location technique
for the active office. In IEEE Personal Communica-
tions.
Yim, J. (2008). Introducing a decision tree-based indoor
positioning technique. Expert Syst. Appl, 34(2).
ZigBee (2012). Zigbee. http://www.zigbee.org/Specificati
ons.aspx.
ICEIS2012-14thInternationalConferenceonEnterpriseInformationSystems
352
