
A Control Strategy for Reducing Fuel Consumption
in a Hybrid Electric Vehicle
Babici Leandru Corneliu Cezar
1
and Alexandru Onea
2
1
Institute of Problem Solving, “Gh. Asachi” Technical University,
Str. Prof. dr. doc. Dimitrie Mangeron nr. 27, Iasi, Romania
2
Department of Automatic Control and Applied Informatics, “Gh. Asachi” Technical University,
Str. Prof. dr. doc. Dimitrie Mangeron nr. 27, Iasi, Romania
Keywords: Control, Command, Hybrid, Power Vehicle.
Abstract: Hybrid electric vehicles are one of the most suitable alternative for conventional automobiles. This paper
describes a control strategy for a hybrid electric vehicle, in order to reduce the fuel consumption, and to
maintain a reasonable state of charge (SOC), at the end of the drive cycle. The main goal is to split the
requested power from the driver between the internal combustion engine, and the electric motor, such way
to decrease the fuel consumption, and to maintain the dynamic performances. The algorithm was tested
using Matlab Simulink and ADVISOR interface. The results include statistical comparisons of the standard
drive cycles using default model and the modified control strategy.
1 INTRODUCTION
Hybrid electric vehicles (HEVs) receive increasing
attention due to their potential for reduced fuel
consumption and low emissions. Increasing fuel cost
and emissions standards across the globe have
popularized this trend in transportation. According
to a recent survey, 36% of motorists worldwide wish
to buy a car with hybrid drive, while 46% of them
showed interest in buying full-electric cars. Energy
efficiency and performances of the automobiles
depend on the control strategies, journey type, and
driver behavior (Chan, 2002). A typical HEV
powertrain has an internal combustion engine (IC)
with an associated fuel tank and an electric motor
with its associated energy storage devices such as
batteries and/or ultracapacitors. Because a hybrid
powertrain is much more complicated than a
conventional powertrain, the coordination and
appropriate control strategy for the energy
components have significant influences on vehicle
dynamic performance, fuel economy, and emissions
(Johnson et al., 2000). In HEV designing
configuration, the commonly constraints are: vehicle
range, acceleration, maximum speed, and road
grades. All these factors are directly related to
driving patterns. The required specifications in HEV
design are usually divided into two categories. The
first depends on consumer’s demand such as
acceleration performance, maximum speed and fuel
economy. This category of specifications is used in
sizing the vehicle components such as, electric
motor (EM), internal combustion engine (ICE) and
transmission system. The second category is based
on ecological issues such as vehicle emissions. The
control strategies should maintain vehicle emissions
within the regulation limits. There are three major
types of hybrid systems that are being used in the
hybrid vehicles market as: series, parallel and series-
parallel hybrid types. The real world drive cycle data
for this study was obtained using the National
Renewable Energy Laboratory’s (NREL) vehicle
level simulation software. ADVISOR, was used to
evaluate and compare the simulated performance of
the hybrid electric vehicle, on different drive cycles
using different strategies (Markel et al., 2002). In
parallel configuration the internal combustion engine
can assist the electric motor during times of high
power demand, according to the control strategy, if
first is sized with less power than the second one.
Energy storage system (ESS) and the electric motor,
are capable of providing all of the vehicle’s power
demands. Recent study has shown that a vehicle can
meet its performance requirements with minimum
power rating if the power train operates mostly in
constant power. The power rating of a motor that
543
Leandru Corneliu Cezar B. and Onea A..
A Control Strategy for Reducing Fuel Consumption in a Hybrid Electric Vehicle.
DOI: 10.5220/0004120205430547
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 543-547
ISBN: 978-989-8565-22-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
deviates from the constant power regime can be
much higher than of a motor, operating at constant
power throughout its speed range in a vehicle. In its
normal operation mode, the electric motor, can
provide constant rated torque up to its base or rated
speed. At this speed, the motor reaches its rated
power limit. The operation beyond the base speed,
up to the maximum speed, is limited to this constant-
power region. The range of this constant-power
operation depends primarily on the particular motor
type and its control strategy. An electric machine
should be able to perform a long constant-power
operation in order to be suitable for HEV
2 HYBRID ELECTRIC VEHICLE
SIZING AND CONTROL
STRATEGY IN ADVISOR
An effective HEV design requires optimal sizing of
its key mechanical and electrical components. In the
design process of an HEV, there are a range of
design variable choices, including HEV
configuration, key mechanical, electrical
components sizes, and control parameters. On the
other hand, the HEV design problem is focused at
several simultaneous objectives such as the
minimization of fuel consumption (FC) and exhaust
emissions (e.g., HC, CO, and NOx) while
maintaining driving performance. However, these
aspects are often in conflict with each other. The
minimum FC does not necessarily result in the
minimum emissions. Several approaches and
methods have been reported to optimize HEV
component sizes and control strategy parameters,
with the aim of simultaneously reducing FC and
exhaust emissions (Banvait, 2009). A parallel hybrid
powertrain is used in this paper, where two
mechanical powers are added together in a
mechanical coupler. The control strategy of a
parallel HEV is responsible for distributing the
driver’s required torque between the IC engine and
electric motor while sustaining a charge in the
batteries. The IC engine is the primary power plant,
and the batteries and the electric motor drive
constitute the energy bumper. Both IC engine and
electric motor may deliver power to the vehicle
wheels. In addition, the electric motor may also be
used as a generator to charge the battery by either
regenerative braking or absorbing the excess power
from the engine when its output is greater than the
output required to drive the wheels. For simulations,
it was used ADVISOR 2003 and Matlab 2011. In
order to reduce the fuel consumption, less required
torque from the ICE was calculated in the control
strategy, and more required torque from electric
motor. In ADVISOR the cumulative fuel use (CFU),
expressed in Laplace is calculated like below:
CFU = 1/s*x*3.785*231/r*61.02
(1)
where r is the fuel density (749), and x is the fuel
use (FU), measured in L/s. 1/s means that the
function is integrated.
FU=y*(0.1*pow((m-n)/(m-20), 0.65)+1)
(2)
where y is the hot fuel use (HFU), m is the
engine coolant thermostat set temperature(96 Celsius
degrees), and n is the coolant temperature. HFU is
obtained from a 2-D lookup table with the inputs
arguments: fc_map_spd (speed map), and
fc_map_trq (torque map). The torque available (T)
from the ICE is calculated as below:
T=max(min[(Tr+Ei), maxt], Tcl)-Ei
(3)
where Tr is the required torque, Ei is the engine
inertia, maxt is the maximum torque required, and
Tcl, is the torque when the throttle is closed. In the
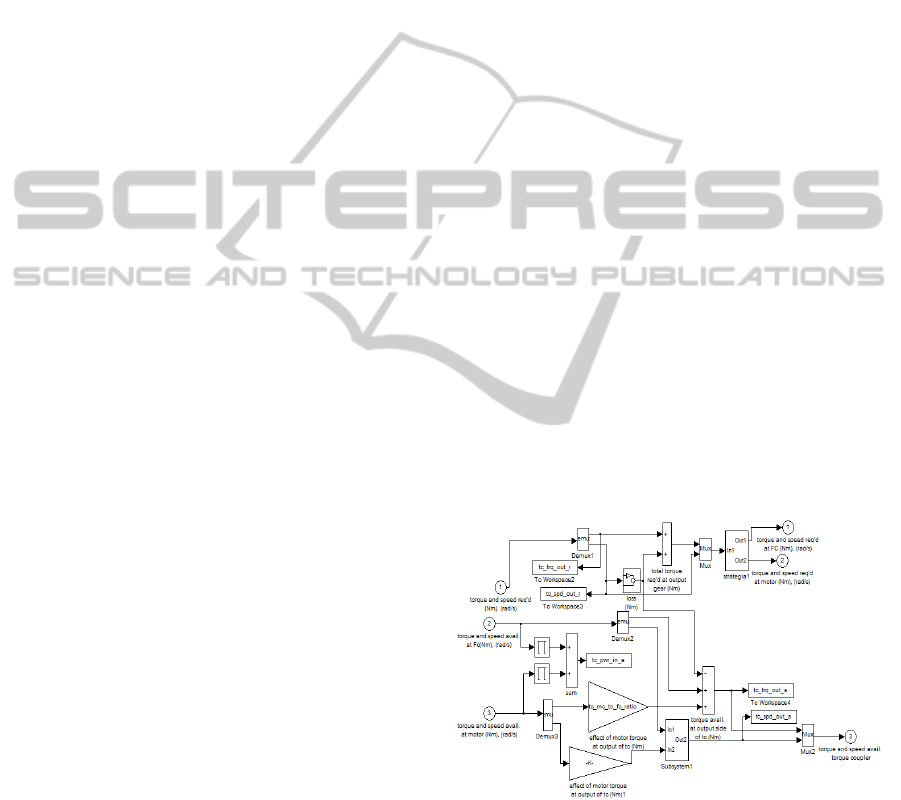
torque coupler block in Advisor, the needed power
from the driver is divided between the requested
power from the ICE and the requested power from
the motor. The inputs in the torque coupler bloc are:
torque and speed required, torque and speed
available from the ICE, and torque and speed
available from the electric motor (EM).
Figure 1: Torque Coupler in Advisor.
The outputs are torque and speed available at
torque coupler, torque and speed required from ICE,
and the required torque and speed from EM. Torque
available at torque coupler (Ta) is the sum of the
torque available from the ICE and EM, minus the
losses in this bloc, because of the friction force.
Ta=Ti+Te*tc_mc-L
(4)
ICINCO 2012 - 9th International Conference on Informatics in Control, Automation and Robotics
544

where Ti is the torque available from ICE, Te is
the available torque from EM , tc_mc is the constant
ratio of speed at motor torque input to speed at
engine torque input, and L is the parameter
according to the losses due to the friction force.
Speed available at the torque coupler (Sa) is the
minimum of the speed available of the ICE and the
EM:
Sa=min(Sf, Se/tc_mc)
(5)
where Sf is the speed available from the ice, Se
is the speed available from the EM. First parameters
that we used are: fuel converter with maximum
power of 41 Kw, 25 modules off lead batteries with
maximum power 25 Kw, and nominal voltage of 308
Volts, and a 75 Kw electric motor. Because the
maximum power of the electric motor is almost
double than the ICE, in the control strategy
proposed, the electric machine is used as the primary
source of power, and the mechanical machine is
used to recharge batteries and to sustain the request
of torque and speed as much as possible.
The control strategy that it was used is illustrated
in the figure 2 below.
Figure 2: Control Strategy in Torque Coupler.
When the driver presses the acceleration pedal, a
torque and speed will be requested from the power
sources. At the requested power from the electric
motor it was added the electric power for the
accessory loads. If the required torque and speed is
less than maximum torque and speed available from
the electric motor, and the necessary power from the
batteries is less than actual power, and SOC is
greater than 0.64, or the requested torque is negative,
then only the electric machine is used. In these
conditions, the internal combustion engine is shut
down. As long as the controller is using only the
electric motor (EM), the system is a zero emission
vehicle. If SOC is below the low limit, and the
required power is greater than the power available,
then both ICE and EM are running together to
overcome the need of torque and speed. A logic
scheme of the control strategy is presented below.
Figure 3: Control strategy logic scheme.
In the above scheme, a Rule Based Energy
Management Control strategy is presented, which
was used by the ADVISOR model in the drive cycle
tests. The engine’s ON/OFF condition is dependent
on the SOC of Battery, power requested and vehicle
speed (Banvait, 2009). Trq&Spd is the torque and
speed required, Preq is the power required, Pa, is the
available power, Tchg is the torque necessary to
recharge the batteries, TaICE is the available torque
from ICE, Trq&Spd a EM, is the available torque
and speed from EM. When the required torque is
below 0, meaning that the vehicle is moving and the
driver is no longer pressing the acceleration pedal,
the ESS is charging. 0.64 is the lower limit of SOC,
for keeping a long life of the batteries. When the
current SOC is higher than its low limit LSOC and if
the required speed is less than a certain value, the
engine will turn off. This specific speed is called the
electric launch speed Ve. Furthermore, if the required
torque is less than a cutoff torque Foff × Tmax, the
engine will also turn off. When the battery SOC is
lower than its low limit, an additional torque Tchg is
Figure 4: Charge torque required.
A Control Strategy for Reducing Fuel Consumption in a Hybrid Electric Vehicle
545

required from the engine to charge the batteries like
in the figure 4 below:
Tchg = cs_chg-trq/(50*(1-
SOC)*(cs_hi_soc-cs_lo_soc))
(6)
where cs_chg_trq is 15.2, cs_hi_soc is 0.7, and
cs_lo_soc is 0.65.
Several approaches and methods have been
reported to optimize HEV component sizes and
control strategy parameters, with the aim of
simultaneously reducing FC and exhaust emissions
(Gao and Mi, 2007; Montazeri et al., 2006;
Poursamad and Montazeri, 2008). However, in most
of the recent studies found in the open literature, the
conflicted optimization targets such as FC and
exhaust emissions are aggregated into a multi
objective function (Desai and Williamson, 2009)-
(Hu et al., 2004).
3 TESTS AND RESULTS
The advanced vehicle simulator (ADVISOR), which
is one of the most popular HEV simulators
worldwide, is used as the modeling and simulation
tool in this paper. ADVISOR employs a combined
forward/backward-facing approach for vehicle
performance simulation. In the following
simulations some fixed parameters are used in the
parallel HEV (Desai and Williamson, 2009), (Fan et
al., 2009):
• rolling resistance coefficient: 0.009;
• aerodynamic drag coefficient: 0.335;
• vehicle front area: 2.0 m2;
• wheel radius: 0.282 m;
• cargo mass: 136 kg;
• gear ratio: 2.48, 3.77, 5.01, 5.57, and 13.45;
• efficiency of the gearbox: 95%;
• gearbox: five-speed manual gearbox;
• gear ratio: 2.48, 3.77, 5.01, 5.57, and 13.45;
• efficiency of the gearbox: 95%;
As the ICE, a Geo Metro 1.0 L SI engine with a
maximum power output of 41 kW and a peak
efficiency of 0.34 is used. In addition, as the electric
motor, a Westinghouse ac induction motor with a
maximum power output of 75 kW and a peak
efficiency of 0.92 is used. In this paper, according to
the charge and discharge resistance curve of the
lead-acid battery the SOC target value is set to 0.65.
Driving cycles are defined as test cycles that are
used to standardize the evaluation of vehicle fuel
economy and emissions. Driving cycles are speed–
time sequences that represent the traffic conditions
and driving behavior in a specific area. In this paper,
three cycles of NYCC, WVUINTER, and UDDS
were used to evaluate the FC and exhaust emissions.
These cycles are the currently used cycles in the
U.S. and European communities. First test was made
under the NYCC drive cycle conditions.
Figure 5: Drive Cycle CYC_NYCC.
During this drive cycle, the vehicle stopped 18
times, had the maximum speed 44.58Km/h, and an
average speed of 11.4km/h. The results were as
follows: fuel consumption is 4.4 L/100Km and a
remaining SOC of 0.6495 at the end of the drive
cycle. Using the standard control strategy under the
same conditions, it was obtained a fuel consumption
of 11.7L/100Km and a remaining SOC of 0.66. The
difference in fuel consumption between the two
control strategies is substantial.
4 CONCLUSIONS
Hybrid electric vehicles are the most viable solution
for the world fuel economy, and emissions. A lot of
control strategies are develop every day, to improve
in a continuous way the dynamic performances of
the vehicles, and to reduce, or to maintain as much
as possible the lowest consumption (Morteza and
Poursamad, 2006),(Fan et al., 2009). In this paper
the electric motor was used most in the control
strategy, with the restriction of maintaining a
reasonable state of charge in the batteries. As the
tests showed, the biggest difference in matter of fuel
consumption was obtained in the NYCC drive cycle.
There the vehicle had a lot of stops and goes, and it
matches perfectly with the real urban traffic in the
hardest conditions. The fuel consumption was more
than satisfactory, and the remaining SOC also. In the
future it is very likely that the full electric vehicles
to run on the streets bun until then, the hybrids are in
the trend, and the control strategies are and will be
improved (Ehsani et al., 2010), (Chan et al., 2010).
ICINCO 2012 - 9th International Conference on Informatics in Control, Automation and Robotics
546

REFERENCES
C. Chan, BThe state of the art of electric and hybrid
vehicles, Proc. IEEE, vol. 90, no. 2, Feb. 2002.
V. H. Johnson, K. B. Wipke, and D. J. Rausen, “HEV
control strategy for real-time optimization of fuel
economy and emissions” presented at the Future Car
Congr., Crystal City, VA, Apr., 2000, SAE Paper No.
2000-01-1543.
T. Markel, A. Brooker, T. Hendricks, V. Johnson, K.
Kelly, B. Kramer, M. O’Keefe, S. Sprik and K.
Wipke, ADVISOR: a systems analysis tool for
advanced vehicle modeling, Journal of Power Sources
(110), 2002
H. Banvait, “A Rule-Based Energy Management Strategy
for Plugin Hybrid Electric Vehicle (PHEV)” 2009
American Control Conference Hyatt Regency
Riverfront, St. Louis, MO, USA June 10-12, 2009
W. Gao and C. Mi, “Hybrid vehicle design using global
optimization algorithms,” Int. J. Elect. Hybrid Veh.,
vol. 1, no. 1, pp. 57–70, Jul. 2007.
M. Montazeri-Gh, A. Poursamad, and B. Ghalichi,
“Application of genetic algorithm for optimization of
control strategy in parallel hybrid electric vehicles,” J.
Franklin Inst., vol. 343, no. 4/5, pp. 420–435,
Jul./Aug. 2006.
A. Poursamad and M. Montazeri, “Design of genetic-
fuzzy control strategy for parallel hybrid electric
vehicles,” Control Eng. Pract., vol. 16, no. 7, pp. 861–
873, Jul. 2008.
C. Desai and S. S. Williamson, “Optimal design of a
parallel hybrid electric vehicle using multiobjective
genetic algorithms,” in Proc. IEEE Conf. Vehicle
Power Propulsion, 2009.
X. Hu, Z. Wang, and L. Liao, “Multiobjective optimization
of HEV fuel economy and emissions using
evolutionary computation,” presented at the Soc.
Automotive Eng. World Congr., Electron. Simulation
Optimization, Detroit, MI, 2004, SAE Paper No.
2004-01-1153.
M. Morteza and A. Poursamad, “Application of genetic
algorithm for simultaneous optimization of HEV
component sizing and control strategy,” Int. J.
Alternative Propulsion, 2006.
Z. Fan, J. Liu, and T. Sorensen, “Improved differential
evolution based on stochastic ranking for robust layout
synthesis of MEMS components,” IEEE Trans. Ind.
Electron., vol. 56, no. 4, Apr. 2009.
M. Ehsani, Y. Gao, and A. Emadi, Modern Electric,
Hybrid Electric, and Fuel Cell Vehicles:
Fundamentals, Theory, and Design, 2nd ed. New
York: Taylor & Francis, 2010.
C. C. Chan, A. Bouscayrol, and K. Chen, “Electric,
hybrid, and fuel-cell vehicles: Architectures and
modeling,” IEEE Trans. Veh. Technol., vol. 59, no. 2,
Feb. 2010.
A Control Strategy for Reducing Fuel Consumption in a Hybrid Electric Vehicle
547
