Ontology Alignment for Classification of Low Level Sensor Data
Marjan Alirezaie and Amy Loutfi
Applied Autonomous Sensor Systems, School of Science and Technology,
¨
Orebro University, SE-701 82,
¨
Orebro, Sweden
Keywords:
Ontology Alignment, Decision Tree, Classification, Semantic Gap.
Abstract:
In this work we show how alignment techniques can be used to align an ontology to a decision tree represent-
ing the features used in classification of sensor signals. The sensor data represents time-series data from an
electronic nose when measuring bacteria in blood samples. The objective is to provide from the classification
of these signals an estimate of the type of bacteria present in the sample. As these classification are inherently
uncertain, knowledge about standard laboratory tests are used together with the classification result in order
to determine a subset of tests to conduct that should result in a fast identification of the bacteria. The infor-
mation about the laboratory tests are contained in an ontology. The result from the alignment is new classifier
where recommendations are given to a user (expert) based on the interpretation of the sensor data that is done
automatically.
1 INTRODUCTION
The uptake of automatic analysis of sensor data in
certain applications can be hindered by the difficulty
for end users to understand the data-driven processes
done by the computer. This is particularly true where
the liability of human error can be high, e.g. medical
diagnosis. In this work, we examine such an exam-
ple where a new sensor technology based on chemi-
cal sensors is applied to the identification of bacteria
in blood. As the presence of bacteria in blood can be
life threatening to a patient, it is important to identify
the bacteria strain and apply an appropriate antibiotic
as quickly as possible. Using the sensor the identifi-
cation process could be reduced by several days, how-
ever, current identification accuracy is approximately
80% using state of the art machine learning methods.
This is due to the fact that the low level sensor data is
dependent to properties such as sensor type and selec-
tivity of the sensors and as such results in misclassi-
fications and an inaccuracy that is not accpetable for
medical domains.
In this paper, an ontological approach is used for
improving signal level classification results. On one
hand, we rely on the sensor data from the electronic
nose to make the identification of bacteria and on the
other hand we use information about traditional labo-
ratory testing to resolve ambiguities in the sensor data
classification. In this way, the uncertainties about the
sensor data are resolved using traditional techniques
with the added benefit that only a subset of traditional
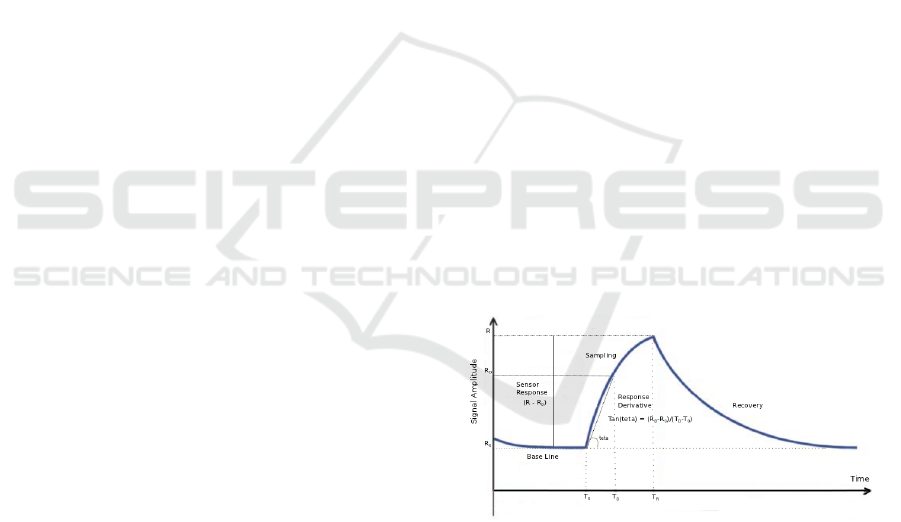
Figure 1: A signal with three phases (Baseline acquisition,
Sampling, Recovery).
techniques need to be applied.
Using alignment techniques, we show how it is
possible to align the ontology with the decision tree
representing the features used in classification of the
sensor signals. Our method replaces nodes in the
decision tree (the classifier) that are particularly un-
certain with information from the ontology. The re-
sulting classifier therefore provides a recommenda-
tion of which laboratory tests should be conducted
taking into account both the ontology and the sen-
sor data. This method is implemented for a task of
identification of 10 blood bacteria species listed in Ta-
ble 1. Each sample contains a time-series response
from each sensor in the electronic nose, depicted in
Figure 1. However, the method proposed in this paper
is generic and could be extended to other ontologies
as well as to other types of sensor data.
This paper is structured as follows: In section 2
we address related works having ontological solutions
89
Alirezaie M. and Loutfi A..
Ontology Alignment for Classification of Low Level Sensor Data.
DOI: 10.5220/0004137400890097
In Proceedings of the International Conference on Knowledge Engineering and Ontology Development (KEOD-2012), pages 89-97
ISBN: 978-989-8565-30-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
Table 1: Bacteria Species.
Code Bacteria Species Name Short Name
1 Escherichia coli EColi
2 Pseudomonas aeruginosa PSAER
3 Staphylococcus aureus STA
4 Klebsiella oxytoca KLOXY
5 Proteus mirabilis PRMIR
6 Entercoccus faecalis ENTFL
7 Staphylococcus lugdunensis STLUG
8 Pasteurella multocida PASMU
9 Steptococcus pyogenes STRPY
10 Hemophilus influenzae HINFL
for different semantic gaps problems. The next sec-
tion concentartes on details of the methodology. After
that, in section 4, our data set structure along with a
short description about sampling process will be dis-
cussed. Then, section 5 represents results of each step
of the methodology. The paper ends with discussion
and conclusion.
2 RELATED WORKS
In order to empower results of signal level data anal-
ysis, several works with data integration approaches
have been used. Multisensor data fusion is known as
one of the most important effort in low level data pro-
cessing. The main point of these works is keeping
the synchronization among low level data that comes
from different sources observing same or related phe-
nomena (Joshi and Sanderson, 1999). In this paper,
our approach concerns fusion of information at dif-
ferent levels of abstraction rather than from different
sources. In particular, we are concerned with bridg-
ing a semantic gap which occurs between these levels
(Ehrig, 2007).
Integrating knowledge bases into architectures of
multi sensor fusion systems is known as a further step
in low level sensor data processing. Some works such
as (Yuguang et al., 2008) tried to find common con-
cepts related to an object expected to be recognized
by sensors for a better object identification and pro-
cessing. In some other works similar to (Melchert
et al., 2007), knowledge representation for reason-
ing on data fusion is considered to improve results of
anchoring defined as symbol-perception connections
for physical objects observed by sensors. While these
methods work well for sensor data representing infor-
mation about objects, they have yet to be extended to
cope with time series sensor data.
In works which utilize concepts in the form of
high level knowledge for sensor level data anno-
tation, some focus on ontologies as their knowl-
edge representation and reasoning framework (Chen,
2010). Ontologies make it possible to reuse existing
knowledge available about measuring data in order to
achieve an annotated data set which is essential for
a more meaningful processing result. For example
(Zhang et al., 2002) tried to induce a new decision
tree as a classifier from an updated data set by in-
cluding new related concepts to the feature set from
ontologies. Likewise, in (Bouza et al., 2008) by re-
structuring data based on concepts extracted from on-
tologies of the features of data, a recommender sys-
tem equiped with decision rules in different levels of
abstraction has been developed. In these works, fea-
tures measured by sensors have intelligible meanings
with themselves so that their integration with other
kinds of data or high level concepts can provide some
outstanding improvements in outputs. Alignment, de-
fined as the process of determining correspondences
between concepts (Euzenat and Shvaiko, 2007), is
mostly used when two sides of the process are ontolo-
gies. However, in this work, we map an ontology with
the decision tree according to the names of bacteria
assigned to different categories in these structures.
3 METHODOLOGY
The methodology used in this work applies the fol-
lowing steps:
• Classifying pre-processed sensor data using the
C4.5 algorithm
• Localizing misclassified cases in the output of the
classifier
• Aligning the classifier and the ontology to find
similar parts between the two structures
• Replacing candidate parts of the ontology with
their counterparts in the classifier
3.1 Classification of Sensor Data
A decision tree classifier is used to classify the out-
put from the electronic nose. The decision tree has
the advantage that it provides transparency in the rep-
resentation of the outputs (Quinlan, 1993) and has a
suitable structure for the alignment process.
The C4.5 algorithm is used and finds a feature of
the training set providing the maximum degree of dis-
crimination between different classes of bacteria. The
algorithm iterates, each time splitting instances of the
training set according to the most informative selected
feature. Each feature value creates a decision node for
the tree (Quinlan, 1993).
KEOD2012-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
90
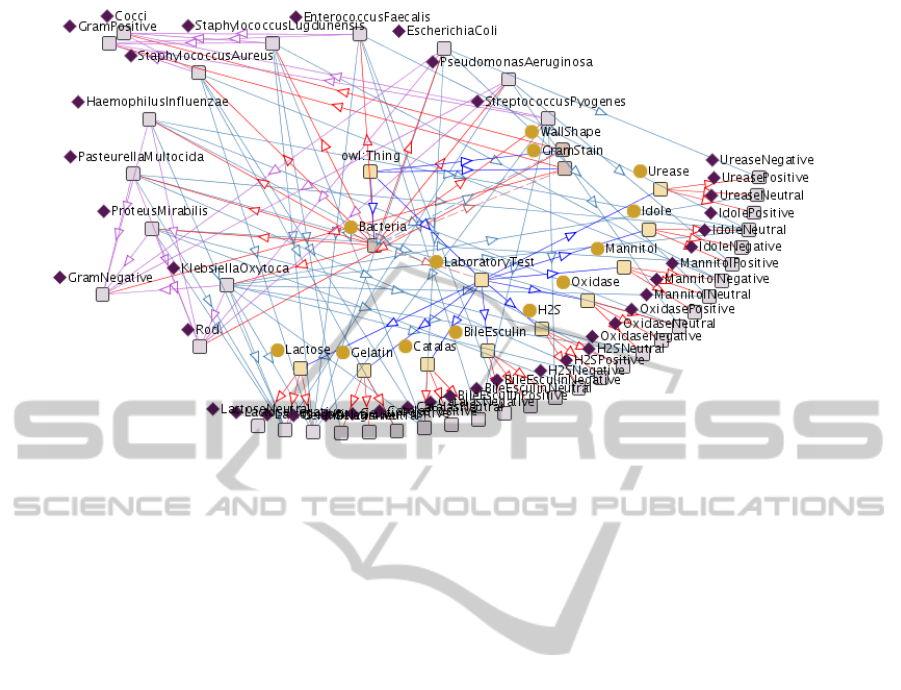
Figure 2: The Bacteria Laboratory Test Ontology.
Using the confusion matrix from the classification
result, another process finds misclassification posi-
tions among leaf nodes of the tree and assigns them all
bacteria names sharing these nodes. This process di-
vides leaves of the tree into two groups A and B where
group A contains nodes without misclassification; and
the rest of leaf nodes belong to the group B. After this
division, a java class runs a sibling checking process
for each leaf node of group B. If the sibling also be-
longs to group B, the process labels the common par-
ent node by all bacteria names shared by its children.
If however, the sibling is a member of the group A, the
process relabels the candidate leaf node by all bacte-
ria sharing this node (true positive and false positive
cases). Algorithm 1 and 2 show details of decision
tree relabeling process. Once all nodes in group B or
in the parents of group B are labeled, the alignment
process begins and searches through the ontology in
order to propose a laboratory test which is discrimi-
natory among bacteria sharing the node. Eventually,
if the process encounters a leaf node belonging to the
group A, it leaves it without any replacement as these
nodes are well classified.
3.2 Bacteria Laboratory Test Ontology
The ontology depicted in Figure 2 totally includes
27 classes among which 8 classes, such as Bacte-
ria, GramStain, LaboratoryTest and WallShape, are
directly subsumed by the thing super class. It also
contains information about results (positive or nega-
tive) of 15 laboratory tests related to bacteria species.
Moreover, this ontology provides information about
the physical and chemical properties of bacteria cell
walls (Gram Positive and Gram Negative) as well as
their cell wall shapes (Cocci and Rods shapes) (Selt-
mann and Holst, 2002). Furthermore, 9 properties un-
dergo relationships through this class hierarchy. For
example, the domain of the hasLaboratoryTest prop-
erty is Bacteria and its range is GramStain class; like-
wise, the property hasWallShape makes a relation be-
tween a sub class of Bacteria and the WallShape class.
This information was collected from (ARUP, 2006)
and then modeled in a RDF ontology via Protege 3.4.4
framework. Since we aim to launch some parts of this
ontology to the classifier implemented in Java, a Java
interface using Jena API converts the RDF file into a
Java class which is able to be queried by ARQ- the
Java RDF query engine.
3.3 Alignment Step
In this work, we align the classifier to the ontology.
One could consider an alternative approach in which
first the classifier is converted to an ontology and two
ontologies are aligned to each other. However, our
work considers a classifier which is intended to be on-
line and incremental and therefore conversion of the
classifier to an ontology would require an additional
step each time the classifier is re-trained.
To perform the alignment between the decision
tree and the ontology, we concentrate on finding sim-
ilarities between two entities: the different categories
of bacteria directly assigned to each node in the de-
cision tree, and the information within class nodes in
the ontology. To do this, mixing terminological
OntologyAlignmentforClassificationofLowLevelSensorData
91
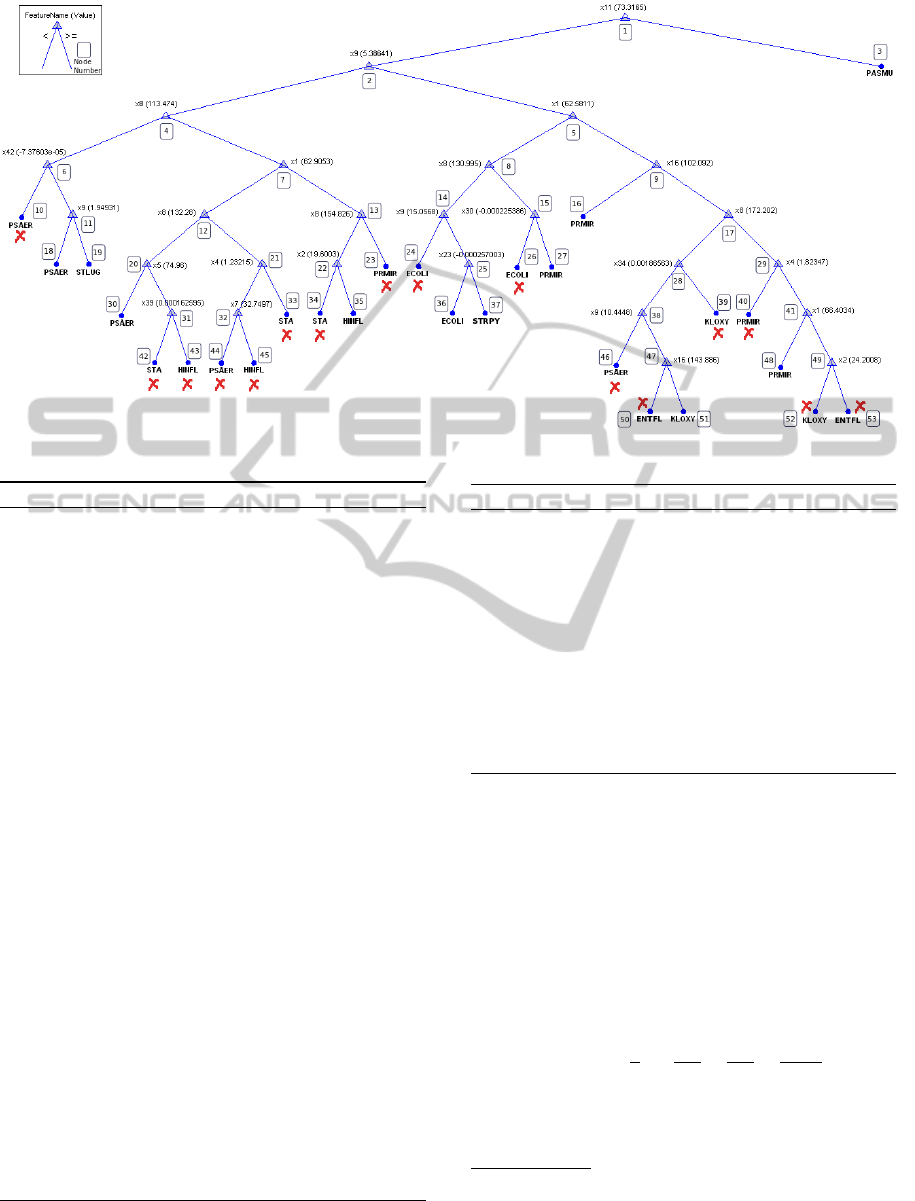
Figure 3: The Decision Tree Classifier-Group B nodes are labeled by red signs.
Algorithm 1: Relabeling DecisionTree.
1: procedure RELABELDTREE(tree)
2: groupB ← GetMisclasi f iedLeaves(tree)
3: for all l in groupB do
4: l.Labels ← GetLabels(l)
5: end for
6: Sort(groupB) Descending based on nodeID
7: for all l in groupB do
8: if ¬l.Checked then
9: l.Checked ← true
10: s ← GetSibling(l)
11: if isLea f (s) then
12: if member(s, groupB) then
13: if ¬CheckParent(l, s) then
14: s.Checked ← true
15: s.Replace ← true
16: l.Replace ← true
17: end if
18: else
19: l.Replace ← true
20: end if
21: else
22: if s.Checked then
23: if ¬CheckParent(l, s) then
24: l.Replace ← true
25: end if
26: else
27: l.Replace ← true
28: end if
29: end if
30: end if
31: end for
32: end procedure
Algorithm 2: Check a Parent Node.
1: function CHECKPARENT(l, s)
2: if hasCommon(l.Labels, s.Labels) then
3: common ← true
4: p ← GetParent(l, s)
5: p.Labels ← GetLabels(l, s)
6: s.Checked ← true
7: p.Replace ← true
8: else
9: common ← f alse
10: end if
11: return common
12: end function
and structural alignment methods is used (Ehrig,
2007)
1
. The Jaro-Winkler algorithm (Jaro, 1989)
finds the most similar name for a selected bacteria in
the decision tree from the ontology. This algorithm
works based on Jaro-Winkler distance (Formula 1)
and counts the number of same characters in two
strings by considering their positions to measure the
distance between them. The higher the JaroWinkler
value is, the more similar the strings (bacteria names)
are (Jaro, 1989).
distance =
1
3
× (
m
|s
1
|
+
m
|s
2
|
+
m −t
m
) (1)
Where:
m: number of matching characters.
1
If the data set is rich enough, semantics should also be
considered in the alignment process (Ehrig, 2007). How-
ever, our alignment methods are verifiable via the classifi-
cation.
KEOD2012-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
92
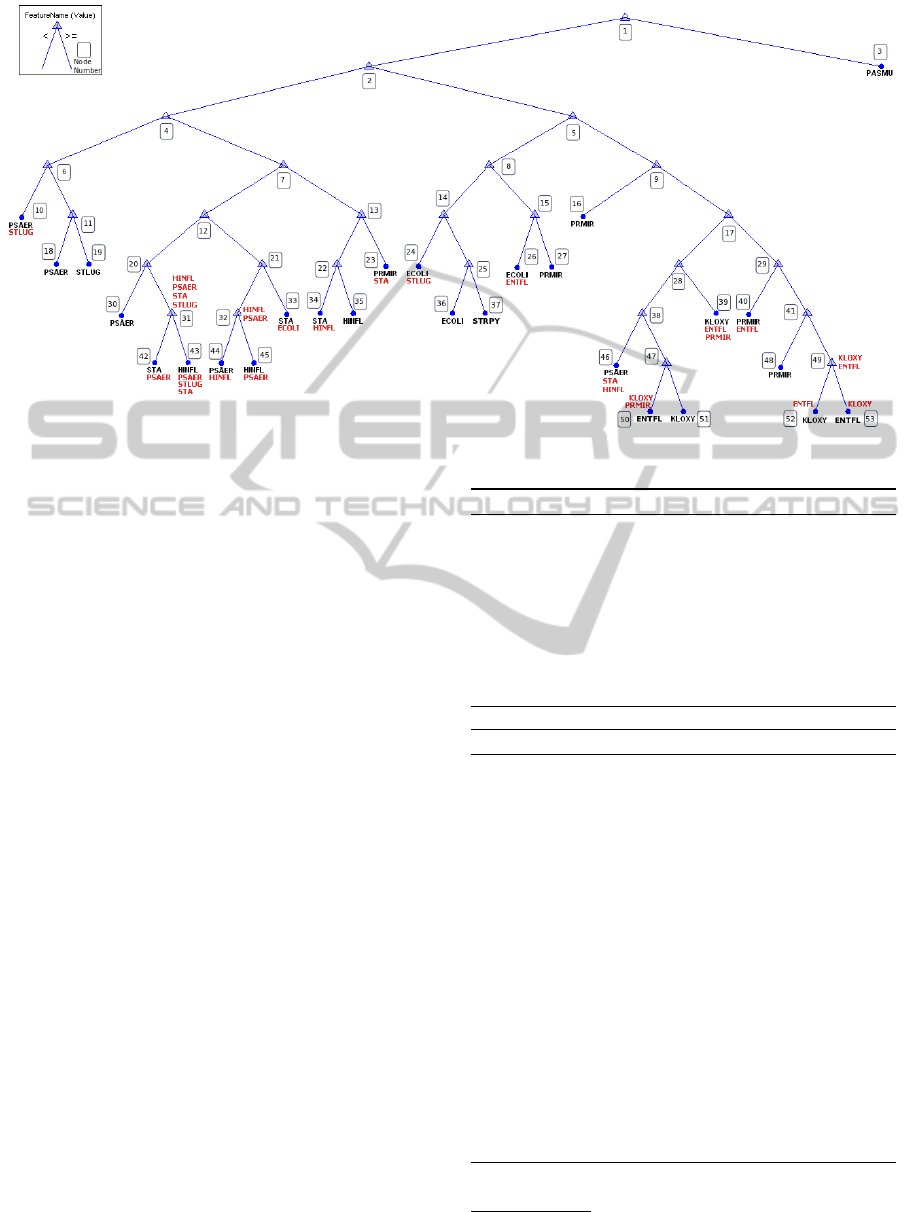
Figure 4: Relabeling Decision Tree By Bacteria Names. (Algorithm 1).
t: half the number of transpositions.
s
i
: length of i
th
string.
The graph inexact matching is used for the struc-
tural alignment as there is no isomorphism between
the decision tree and the ontology (Hlaoui, 2002). In-
deed, by using this kind of graph matching, the align-
ment process focuses on existing relations between
labeled nodes in the decision tree to find similar sub-
sumption relations in the ontology.
After finding the similarities, a replacement pro-
cess transfers information from the ontology to the
classifier in order to provide an annotated decision
tree that contains two kinds of information, sensor
values and laboratory tests. The algorithmic details
of this process are represented in Algorithm 3 and
4. The resulting decision tree is a classfier for those
cases mapped to leaf nodes of group A and as a rec-
ommender for group B nodes.
4 DATASET
The clinical samples in this scenario are 10 types
of bacteria species listed in Table 1, sub-cultured on
blood agar plates and a bacterial suspension solution.
Further details of the sampling process and prepration
are given in (Trincavelli et al., 2010). Each sampling
cycle is 5 minutes and contains three phases (Fig-
ure 1). The first phase is called the baseline acqui-
sition and lasts for 10 seconds. In this phase sensors
are exposed to a reference gas which is air in this ex-
Algorithm 3: Alignment (D-Tree and Ontology)
1: procedure ALIGNMENT(tree, ontology)
2: Sort(tree) Ascending based on nodeID
3: for all tn in tree do
4: if tn.Replace then
5: c ← GetSimilar(tn, ontology)
6: Replace(tn, c, tree)
7: end if
8: end for
9: end procedure
Algorithm 4: Finding Similar Parts in the Ontology.
1: function GETSIMILAR(tn, ontology)
2: min ← ABigNumber
3: n ← GetLabelsNumber(tn.Labels)
4: ontoNodes ← GetNodes(ontology, n) same
number of labels
5: for all on in ontoNodes do
6: for i ← 1, n do
7: for j ← 1, n do
8: d[i][ j] ←
JaroWinkler(tn.Labels[i], on.Labels[ j])
9: end for
10: end for
11: on.distance ← GetSumBestMinimumSet(d)
12: if on.distance ≤ min then
13: min ← on.distance
14: candidate ← on
15: end if
16: end for
17: return candidate
18: end function
periment. Next, the headspace
2
gases are injected into
2
The headspace is the space just above the liquid sample
in a bottle (Pearce et al., 2003)
OntologyAlignmentforClassificationofLowLevelSensorData
93
the sensor chambers and sensors are exposed for 30
seconds. The last phase is a recovery phase of 260
seconds to recover sensors for the next round of test-
ing by flushing the sensors with the reference gas.
Each of the 10 bacteria has been sampled 60 times.
To make a more suitable structured training set
for the classification, we need to pass sensor readings
which are continuous time series data generated by 22
sensors through a pre processing phase that includes
two steps. Baseline manipulation and compression
normalizes the sensor data according to the baseline
phase (Pearce et al., 2003) and extracts informative
descriptors of signals to make feature vectors (Pearce
et al., 2003), respectively.
We use two descriptors indicated in Figure 1 for
each signal: The static response calculating the differ-
ence between end of the sampling phase and baseline
gives one single parameter; and the response deriva-
tive which is equal to the slope of the line contigu-
ous to that segment of the signal related to the first
three seconds of the sampling phase. Eventually, we
produce 44 feature values for the dataset of 600 sam-
ples accompanied by a label list containing bacteria
species names listed in the third column of Table 1.
5 RESULTS
A 10-fold cross validation is applied on the data set
to generalize the error estimation of the classification
(Bishop, 2006). In this process, two thirds (400 cases)
of samples in the data set were assignd to the training
set and the remainder were used as testing set.
Figure 3 shows the result of the classification fed
by the training set. Decision nodes of the tree are la-
beled by feature names and criteria values. Leaf nodes
of the tree are also marked by bacteria species names.
The confusion matrix of this classification is depicted
in Figure 5. According to this matrix and Formula 2,
among the 200 test cases there are 39 misclassifica-
tions corresponding to an accuracy of 80%.
Figure 5: Classififcation Confusion Matrix.
accuracy =
t p +tn
t p +tn + f p + f n
(2)
The misclassified nodes are shown in Figure 3
and these form the B group nodes. Table 2 also shows
Table 2: B-leaf Nodes.
Row Node Predicted Actual Number
1 10 2 7 3
2 23 5 3 3
3 24 1 7 2
4 26 1 6 2
5 33 3 1 4
6 34 3 10 3
7 39 4 5 1
8 39 4 6 1
9 40 5 6 2
10 42 3 2 2
11 43 10 2 2
12 43 10 3 1
13 43 10 7 3
14 44 2 10 1
15 45 10 2 1
16 46 2 3 1
17 50 6 4 2
18 50 6 5 1
19 52 4 6 2
20 53 6 4 1
more information about leaf nodes of group B. For ex-
ample in the first row of the table two types of bacteria
are sharing node number 10, predicted type 2 (accord-
ing to the training set) and actual type 7 (according to
the test set). Likewise, the 11th, 12th and 13th rows il-
lustrate the details of node number 43 which is shared
by 4 kinds of bacteria, bacteria type 10, 2, 3 and 7. To
resolve these inconsistencies between predicted and
actual bacteria types, we utilize the ontology sugges-
tions related to the laboratory tests and update our de-
cision tree based on the ontology offers to make the
classifier to a recommender system. As mentioned
above, the alignment process uses terminological and
structural methods to find similarities between two
structures. To visually make more sense about the
structural matching process, Figure 4 depicts the in-
formation of Table 2 directly on the decision tree.
The alignment process finds bacteria names shar-
ing a leaf node belonging to group B. For example, the
sub tree containing node 49 as the parent and nodes 52
and 53 as children belonging to group B (Figure 4),
are sharing bacteria number 4 (Klebsiella Oxytoca or
KLOXY) and 6 (Entercoccus faecalis or ENTFL). By
the string matching method, the alignment process
finds all bacteria names in the ontology that are simi-
lar to the candidates. Table 3 demonstrates some parts
of Jaro-Winkler distances between bacteria names in
the decision tree and in the ontology. As we can
see the minimum value of each column is located in
the diagonal position which proves the correctness of
bacteria names mapping. The graph matching method
KEOD2012-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
94
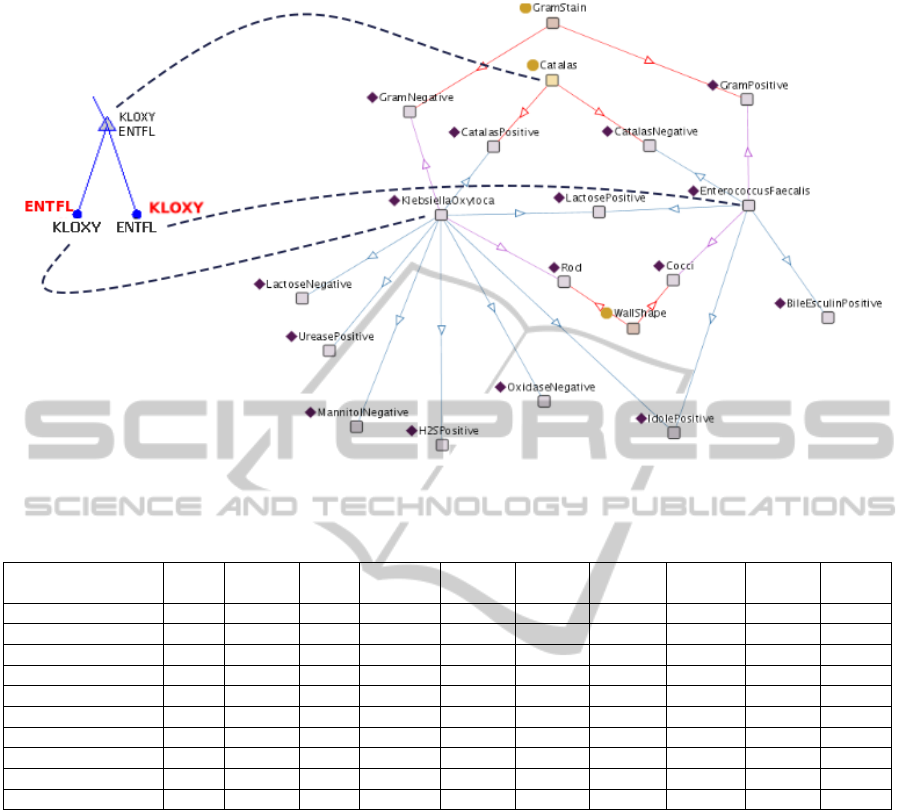
Figure 6: Alignment Process (Between Candidate Sub-Tree and Matched Sub-Ontology).
Table 3: Jaro-Winkler distances of bacteria names between the decision tree and the ontology. (minimum value of each
column is in red).
X
X
X
X
X
X
X
X
X
X
Ontology
D-Tree
EColi PSAER STA KLOXY PRMIR ENTFL STLUG PASMU STRPY HINFL
Escherichia coli 0.364 0.515 0.535 1 0.515 0.521 0.579 0.579 0.569 0.492
Pseudomonas ae... 0.503 0.259 0.414 0.585 0.379 0.503 0.503 0.352 0.414 0.585
Staphylococcus a... 0.641 0.530 0.200 0.530 0.584 0.502 0.279 0.503 0.397 0.502
Klebsiella oxytoca 0.522 0.522 0.407 0.397 0.581 0.663 0.663 0.663 0.407 0.663
Proteus mira... 0.519 0.439 0.572 0.580 0.242 0.661 0.519 0.364 0.536 1
Entercoccus fa... 0.477 0.502 0.540 0.584 0.502 0.293 0.502 0.668 1 0.584
Staphylococcus lu... 0.650 0.539 0.206 0.539 0.587 0.508 0.269 0.515 0.406 0.508
Pasteurella mul... 0.502 0.289 0.397 0.584 0.377 0.530 0.420 0.224 0.579 0.584
Steptococcus py... 0.532 0.506 0.331 0.585 0.532 0.670 0.337 0.532 0.238 1
Hemophilus infl... 0.423 0.423 0.581 0.670 0.532 0.503 0.532 0.391 0.359 0.379
then extracts the most similar structure to this part
of the sub tree depicted in Figure 6. The laboratory
tests candidates for parent of node 52 and 53 sharing
KLOXY and ENTFL are Catalas, Mannitol Fermen-
tation, Urease and Methyl Red. However, the cost and
duration issues of laboratory tests considered in the
designing phase of the ontology cause the ontology
to suggest Catalas test which has negative response
for ENTFL and positive answer for KLOXY. There-
fore, now the ontology suggestion can be replaced
by the sub tree holding information about these leaf
nodes that contain some uncertainties about the bac-
teria types. By applying the alignment process on the
whole nodes in group B, we will finally have an an-
notated decision tree demonstrated in Figure 7.
6 CONCLUSIONS
In this work, we implemented an ontological method-
ology to improve classification results of electronic
nose sensors readings. High level information com-
ing from the ontology facilitate decision making and
help to compensate the ambiguity existing in some re-
sponses of the decision tree as the classifier of bacteria
types.
Indeed, using the bacteria laboratory tests alone,
the ontology may suggest about 6 different laboratory
tests for identification of these 10 types of bacteria
(ARUP, 2006). On the other hand, the classification
from the electronic nose does not have a sufficently
precise response for medical staffs who may offer dif-
ferent kinds of treatment based on the bacteria type
detected in a blood sample. By mixing a low level
OntologyAlignmentforClassificationofLowLevelSensorData
95
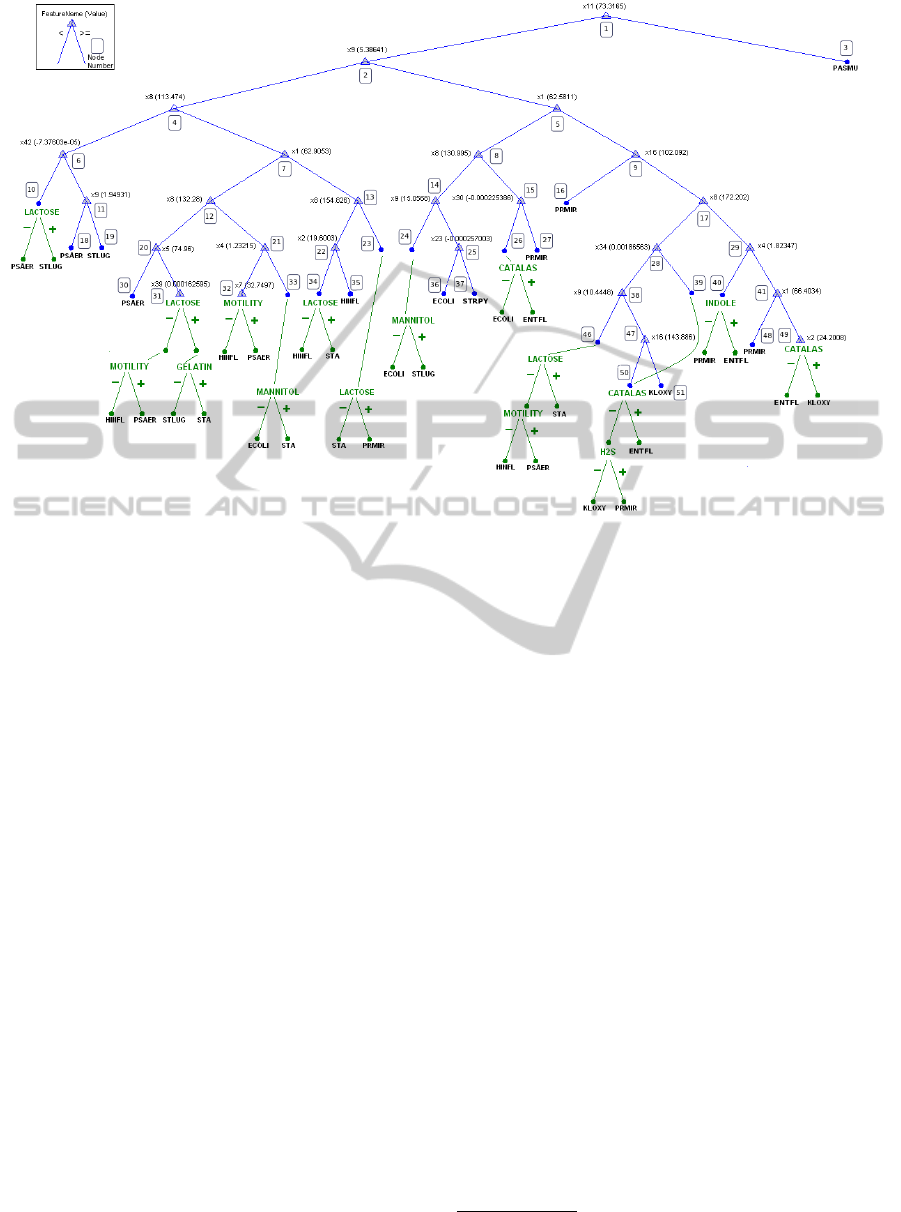
Figure 7: Annotated Decision Tree by Laboratory Test Information.
sensor data structured in a decision tree and high level
knowledge in the form of an ontology we could bridge
the gap existing between these two kinds of data and
reach to a system that has a classifier-recommender
role in the identification process. Instead of offering
many numbers of laboratory tests, it offers 2 tests to
resolve the ambiguities in worst cases (Figure 7).
As the details of the methodology show, there is
yet a quantitative evaluation for the system and the fu-
ture work will focus on obtaining the feedback from
experts of the domain where they encounter some
suggestions about laboratory tests given by the sys-
tem. From a technical point of view, the system
could be further generalized in the many regards such
as the classification and/or the automatic acquisition
of knowledge. For this reason, we have created a
method using ontologies to allow for this generaliza-
tion and future work will make full use of the onto-
logical structure. Regarding the classification, deci-
sion trees were used due to their hierarchical struc-
tures making more sense in the process of alignment.
However, a more ideal alignment model is one that is
independent from the classifier structure. Moreover,
modeling available knowledge into ontologies was ac-
complished manually. We will address the possibil-
ity to use automatic knowledge acquisition in order to
find knowledge form disparate and perhaps unstruc-
tured contexts by more powerful matching methods
to which we can apply some OAEI
3
algorithms in or-
der to assess the whole alignment process.
REFERENCES
ARUP (2006). A national clinical and anatomic pathology
reference laboratory. www.aruplab.com.
Bishop, C. (2006). Pattern Recognition and Ma-
chine Learning (Information Science and Statistics).
Springer, 1 edition.
Bouza, A., Reif, G., Bernstein, A., and Gall, H. (2008).
Semtree: Ontology-based decision tree algorithm for
recommender systems. In International Semantic Web
Conference (Posters & Demos).
Chen, Y. (2010). Development of a method for ontology-
based empirical knowledge representation and reason-
ing. Decision Support Systems, 50(1):1–20.
Ehrig, M. (2007). Ontology Alignment: Bridging the Se-
mantic Gap, volume 4 of Semantic Web And Beyond
Computing for Human Experience. Springer.
Euzenat, J. and Shvaiko, P. (2007). Ontology matching.
Springer-Verlag, Heidelberg (DE).
Hlaoui, A. (2002). A new algorithm for inexact graph
matching. Object recognition supported by user in-
teraction for service robots, 4(c):180–183.
Jaro, M. (1989). Advances in record-linkage methodol-
ogy as applied to matching the 1985 census of tampa,
florida. Journal of the American Statistical Society.
3
Ontology Alignment Evaluation Initiative (http://
oaei.ontologymatching.org/)
KEOD2012-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
96

Joshi, R. and Sanderson, A. (1999). Multisensor Fusion: A
Minimal Representation Framework. Series in Intel-
ligent Control and Intelligent Automation. World Sci-
entific.
Melchert, J., Coradeschi, S., and Loutfi, A. (2007). Knowl-
edge representation and reasoning for perceptual an-
choring. Tools with Artificial Intelligence.
Pearce, T., Schiffman, S., Nagle, H., and Gardner, J. (2003).
Handbook of machine olfaction: electronic nose tech-
nology. Wiley-VCH.
Quinlan, R. (1993). C4.5: Programs for Machine Learning.
Morgan Kaufmann Publishers, San Mateo, C.
Seltmann, G. and Holst, O. (2002). The Bacterial Cell Wall.
Springer-Verlag.
Trincavelli, M., Coradeschi, S., Lout, A., Sderquist, B., and
Thunberg, P. (2010). Direct identication of bacteria in
blood culture samples using an electronic nose. IEEE
Trans Biomedical Engineering.
Yuguang, N., Gaowei, Y., Gang, X., Zehua, C., and Kem-
ing, X. (2008). Multi-sensor fusion using knowledge-
based mind evolutionary algorithm. Convergence and
Hybrid Information Technology.
Zhang, J., Silvescu, A., and Honavar, V. (2002). Ontology-
driven induction of decision trees at multiple levels
of abstraction. In In Proceedings of Symposium on
Abstraction, Reformulation, and Approximation 2002.
Springer-Verlag.
OntologyAlignmentforClassificationofLowLevelSensorData
97
