
Combining Qualitative Spatial Reasoning and Ontological Reasoning for
Supporting Robot Tasks
Lothar Hotz, Pascal Rost and Stephanie von Riegen
HITeC e.V. c/o Fachbereich Informatik, Universit
¨
at Hamburg, Hamburg, Germany
Keywords:
Qualitative Spatial Reasoning, Ontological Reasoning, Cognitive Robotics, Knowledge-based Systems
Applications.
Abstract:
This paper presents an application of spatial and ontology reasoning technologies for mobile robot tasks. We
provide a combination of the spatial reasoning calculi RCC-8 and CDC as well as their integration with OWL-
based ontologies. An architecture that combines inference tools like Prolog, description logic reasoners, and
complex-event processing implements our approach. We illustrate the results with a mobile robot scenario
in a restaurant. In this paper, global path-finding demonstrates the use of qualitative spatial and ontological
reasoning.
1 INTRODUCTION
The research field cognitive robotics addresses the use
of general logical representation and reasoning meth-
ods and tools for controlling robots in dynamic and in-
completely known worlds (Levesque and Lakemeyer,
2007). Following this direction, qualitative spatial
reasoning provides a mean for representing and rea-
soning about spatial occurrences like The plate is on
the table. or The robot is close to the guest. Espe-
cially the abstraction provided by qualitative repre-
sentations enables effective and short representations
about the quantitative world of robots. Such repre-
sentation support robot’s tasks like interaction ability
or path finding. Qualitative spatial reasoning enables
the explicit representation of spatial interrelations of
regions or objects. Its use for autonomous, mobile
robots is still a research topic. Especially, if all main
spatial dimensions (i.e. topology, orientation, and dis-
tance) shall be considered (Renz and Nebel, 2007).
Because typical spatial calculi focus on one dimen-
sion (e.g. Region Connection Calculus (RCC) (Ran-
dell et al., 1992) on topology and Cardinal Direction
Calculus (CDC) (Goyal, 2000) on orientation), the
combination of qualitative spatial calculi becomes im-
portant.
For representing robot’s knowledge about objects
and the environment, ontologies can be applied. By
using this approach, domain knowledge (like objects
and environments) and application knowledge (like
activities for serving a guest in a restaurant) can be
made explicit to the robot. Enhancing ontological
reasoning with qualitative spatial reasoning is a chal-
lenging task, because, if combining both, the ability to
reason about spatial knowledge and recognize incon-
sistencies gets lost, or the decidability of ontological
reasoning gets lost (Katz and Grau, 2005). Further-
more, the concrete contribution of qualitative and on-
tological reasoning for robot tasks is not finally clear.
Thus, in this paper, we present a case study about
combining two qualitative spatial calculi, i.e. RCC
and CDC, with ontological representations in a robot
scenario. We start with a concrete scenario dealing
with a robot acting in a restaurant environment and
extract requirements for the technologies (Section 2).
Then, we provide a short overview of applied rep-
resentation techniques, RCC, CDC, and ontological
reasoning (Section 3). Section 4 presents our inte-
grated approach which is evaluated by implementing
a system using Prolog, the complex event processing
ETALIS (Event Transaction Logic Inference System),
and the Web Ontology Language OWL (Antoniou and
Harmelen, 2003) (see Section 5). We conclude with a
summary in Section 6.
2 USE CASES AND
REQUIREMENTS
An interesting environment for illustrating the use
of knowledge representation techniques for service
377
von Riegen S., Hotz L. and Rost P..
Combining Qualitative Spatial Reasoning and Ontological Reasoning for Supporting Robot Tasks.
DOI: 10.5220/0004140003770380
In Proceedings of the International Conference on Knowledge Engineering and Ontology Development (KEOD-2012), pages 377-380
ISBN: 978-989-8565-30-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

robot tasks is a restaurant environment. In such an
environment, domain-specific objects, concepts, and
rooms have to be represented. Objects might have hi-
erarchical relations and temporal or spatial relation-
ships to each other. Terminological knowledge about
dishes, drinks, meals etc. is needed. Areas which
may contain food products may be distinguished from
seating areas. For our experiments demonstrated in
this paper, we consider an artificial restaurant layout
as it is presented in Figure 1.
One requirement that have to be fulfilled for pro-
cessing such scenarios is that the robot shall identify
an ideal path to a table, i.e. using the spatial configu-
ration of the environment the robot shall infer, if a cer-
tain place is reachable and how the path to it is (global
path-finding, see Section 4). Another task would be to
compute if the current position of the robot is suitable
for placing a cup on the counter, i.e. to infer if the ac-
tual position is practical to interact with a target object
(interaction ability, see (Rost et al., 2012)).
3 BACKGROUND
The basic techniques we combine in our approach are
qualitative spatial reasoning and ontological reason-
ing.
Spatial calculi represent relations between objects
with finite sets of binary relations. They can de-
rive new knowledge and check if a provided knowl-
edge base is consistent. RCC enables reasoning
about topological properties of regions. Especially
RCC-8 provides eight spatial relations disconnected
(DC), externally connected (EC), tangential proper
part (TPP), non-tangential proper part (NTPP), par-
tially overlapping (PO), equal (EQ), and the inverses
T PP
i
and NT PP
i
.
The Cardinal Direction Calculus (CDC) enables
reasoning about relative orientation between objects
by using the eight cardinal points (N, NE, E, SE, S,
SW, W, NW) as well as one further relation for repre-
senting direct neighborhood (i.e. bounding box, B).
When using a calculus like RCC-8 or CDC the ba-
sic inference mechanism is based on a composition
operator ◦. Let D be a set of regions and R
1
, R
2
,
R
3
relations of the qualitative calculus: R
1
◦ R
2
=
{ (x R
3
z) | ∃y ∈ D : ((x R
1
y) ∧ (y R
2
z))}. Thus, a
composition operator computes the relation between
two regions x and z on the basis of a further region y
which is related to x and z. A composition table for a
certain calculus can be used to compute the composi-
tion operator (Goyal, 2000).
Through an ontological language like OWL it is
possible to represent knowledge about objects, activi-
ties, relations etc. of a domain. By providing a formal
representation such ontologies are exchangeable and,
more important, they can be used for inference ser-
vices (e.g. provided by Description Logic Reasoners,
(DL reasoner)). Means for representation are the sep-
aration of instances (representing individual objects)
from concepts (as set of instances), taxonomic rela-
tions between concepts, and properties as a further
type of relation between concepts. A TBox contains
all concepts and an ABox all instances.
However, the combination of OWL and qualitative
calculi is not straight forward. Especially to combine
both, RCC-8 and CDC (for topology and orientation)
with an ontology is not yet elaborated (at least to our
knowledge).
4 CONCEPTUAL APPROACH
For applying qualitative spatial reasoning in a mobile
robot environment as presented in Section 2, we de-
veloped the following approach.
For getting a representation of the domain knowl-
edge a TBox is used for representing classes occur-
ring in the environment (like cup, plate, table, room
etc.). ABox instances represent concrete individual
objects (like table1, counter1 etc.). Object properties
of OWL (Ob jectProperty) can be used for represent-
ing qualitative relations of the calculi. Object proper-
ties follow the same semantics as relations do.
For computing the consistency of the provided
facts and computing all spatial relationships of all ob-
jects in the environment, we use the introduced cal-
culi RCC-8 and CDC. Here, we apply a basic prop-
erty of OWL-ontologies, i.e. machine readability. By
automatically accessing ABox instances of the ontol-
ogy, we extract the instances and their relations from
the ABox and import them into a constraint system
which uses the composition table for the mentioned
inference tasks. The constraint system uses the path-
consistency algorithm for making implicit spatial re-
lations between domain objects (instances) explicit.
After doing so, new spatial relations can be imported
into the ABox. Thus, we combine the ontology (and
a DL reasoner) with a qualitative spatial constraint
system instead of including spatial calculi in a DL
reasoner directly. Our approach is similar to Pellet-
Spatial (Bhatt et al., 2009), however, with two spatial
calculi. In summary, using an ontology enables a cen-
tral point of interchangeable knowledge needed by a
robot for fulfilling its tasks, ensuring consistency of
the knowledge through its formal representation, and
making implicit knowledge (here about spatial occur-
rences) explicit by inference methods.
KEOD2012-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
378
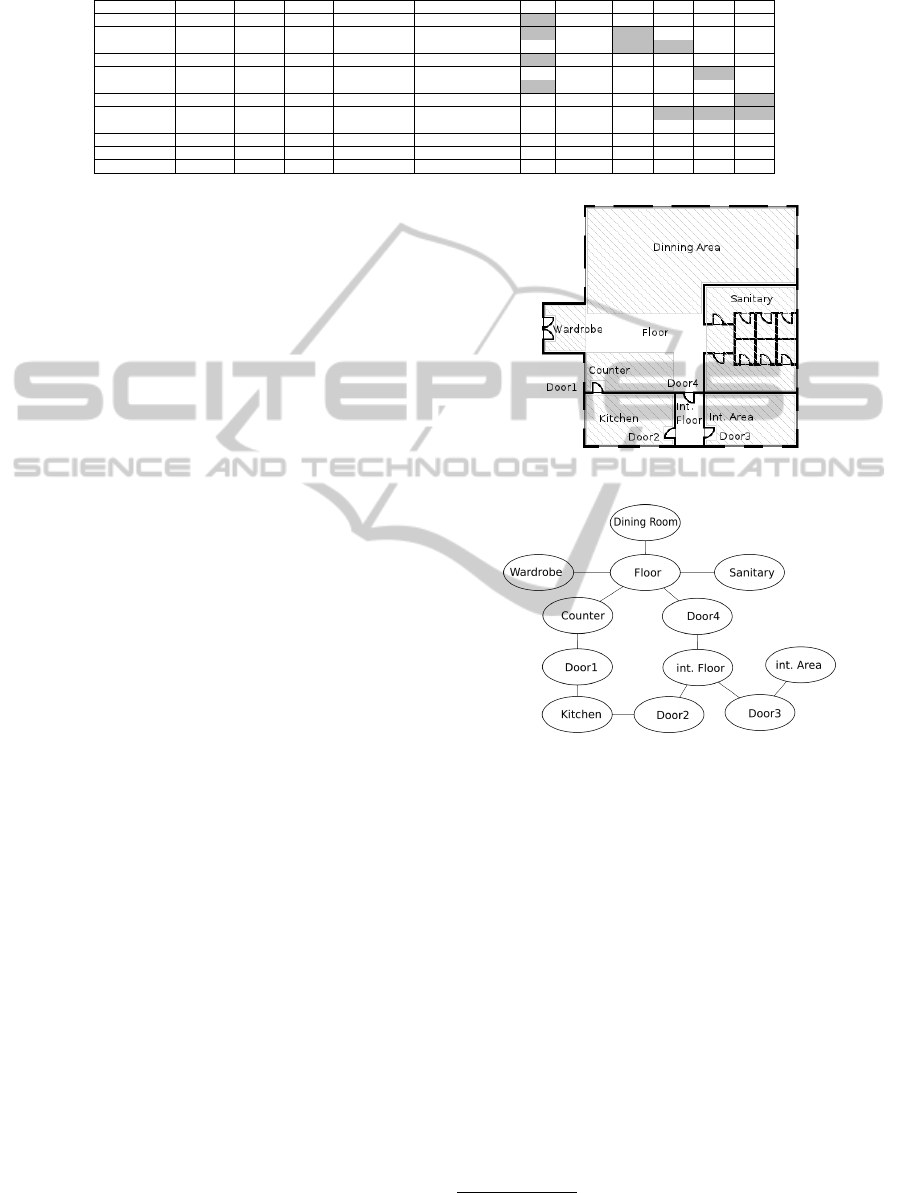
Table 1: Spatial configuration of the rooms modeled with RCC-8.
Wardrobe Counter Kitchen Dining Room int. Area Sanitary Floor int. Floor Door1 Door2 Door3 Door4
Wardrobe EQ EC DC EC DC DC PO DC DC DC DC DC
Counter EQ EC DC DC DC PO DC PO DC DC DC
Kitchen EQ DC DC DC DC EC PO PO DC DC
Dining Room EQ DC EC PO DC DC DC DC DC
int. Area EQ EC DC EC DC DC PO DC
Sanitary EQ PO DC DC DC DC DC
Floor EQ EC DC DC DC PO
int. Floor EQ DC PO PO PO
Door1 EQ DC DC DC
Door2 EQ DC DC
Door3 EQ DC
Door4 EQ
Qualitative spatial reasoning with RCC and CDC
can be used for computing a path from a start to
an end point. In the following, we consider global
path-finding from a point A to B without taking ob-
stacles into account. Handling obstacles would in-
volve local path-finding algorithms. Typically applied
global path-finding algorithms represent the search
environment as an undirected, weighted graph (Dijk-
stra, 1959). For making use of this source, our ap-
proach maps qualitative representations of the envi-
ronment from the ontology into undirected graphs and
applies one of these algorithms. If the ontology is not
(manually) populated with pre-existing spatial config-
urations of the rooms in the environment, the popula-
tion process could be done with a combined SLAM
(Simultaneous Localization and Mapping) and image
processing approach. The exact procedure of auto-
matic population of spatial configurations is an ongo-
ing research topic.
Following scenario illustrates the mapping of a
spatial configuration into a graph for computing a
global path. A robot needs to compute a global path
for getting from the kitchen to the dining area. From
such a scenario, we model the undirected graph by
introducing for each room a node and the relations
between rooms as edges between nodes. As edges
we use RCC-8 relations, especially the relation PO
(overlapping) is used when there exists a direct path
from a room to another room. Thus, between two
nodes in the graph there exist exactly one edge, if
between the corresponding rooms or regions a PO
relation exists. The weight of the edge models the
quantitative distance between the rooms or is equal
1, if not known. Unknown, or uncertain spatial rela-
tions between different rooms can be computed with
the previously shown reasoning techniques. Figure
1 presents a sketch of the restaurant with rooms and
doors. The floor is separated into Floor and inter-
nal Floor (int. Floor). Table 1 represents the spatial
configuration modeled with RCC-8 relations. Rela-
tions of type PO are bold, the rooms can be directly
reached. Each door is represented by an own region.
Figure 2 presents the undirected graph for this con-
figuration. Edges have no weights, for simplicity rea-
Figure 1: Environment of the restaurant with doors.
Figure 2: Undirected, unweighted graph for global path-
finding.
sons. Such a graph can be used as input for typical
path-finding algorithms.
5 EVALUATION OF THE
APPROACH
For evaluating our conceptual approach, we imple-
mented an architecture that combines the needed in-
ference technologies. First, we represent the system
setup and then discuss some insights we had.
As a basic system, we use ETALIS
1
. This sys-
tem combines complex event processing (CEP) with
Prolog. Event processing enables the processing of
continuous data streams created through the sensors
of a robot. Prolog enables the representation and
1
http://code.google.com/p/etalis/
CombiningQualitativeSpatialReasoningandOntologicalReasoningforSupportingRobotTasks
379

dynamic adaptation of facts of the environment of
the robot, an external database is thus not necessary.
Compared to other CEP-systems, which are imple-
mented with procedural or object-oriented languages,
ETALIS is more flexible and partially with good per-
formance. Our approach combines ETALIS with the
PROLOG-OWL interface THEA2 (Vangelis Vassil-
iadis, Chris Mungall, 2012), and DL reasoners to our
system called ETALIS-Spatial.
For knowledge representation, we create an OWL
knowledge base. Objects and spatial relations are de-
fined as described in Section 3. THEA2 enables the
access to the ABox for extracting spatial relations and
all instances for participating objects. Furthermore,
THEA2 allows direct access to commonly used DL
reasoners, like Pellet
2
. ETALIS-Spatial starts with the
composition tables and applies a path-consistency al-
gorithm typically used for solving constraint satisfac-
tion problems (Tsang, 1993).
In summary, the evaluation shows an implemen-
tation of our conceptual approach presented in Sec-
tion 4. We applied RCC-8 and CDC to cover topol-
ogy and orientation aspects of spatial reasoning. The
qualitative spatial relations can be represented in an
OWL ontology as properties. The OWL-based ontol-
ogy acts furthermore as a central place for all needed
knowledge. The knowledge can be extracted from the
ontology for processing in a separate spatial Prolog-
based reasoner. Computing new spatial relations and
consistency checks are performed by a Prolog sys-
tem based on composition tables provided by the cal-
culi in combination with path-consistency algorithms.
Thereby, we use the implicit inherent information
about paths contained in RCC-8 relations for building
an undirected unweighted graph that again is used by
typical global path-finding algorithms. By using com-
plex event processing, a continuous stream of data
could be processed.
Our implementation uses the CEP-framework
ETALIS and enhances it to ETALIS-Spatial. We im-
plemented an ontology representing parts of a restau-
rant. In principle, such an ontology can be enhanced
to cover more facets of the tasks or other domain ar-
eas. Further or other qualitative calculi which han-
dle other aspects can be integrated into the system
by modeling their composition tables and relations in
Prolog.
6 CONCLUSIONS
This paper demonstrates the application of the quali-
2
http://clarkparsia.com/pellet/spatial/
tative spatial calculi RCC-8 and CDC for robot tasks.
The approach combines these calculi with ontological
reasoning by modeling the relations in OWL but com-
puting spatial inferences with logical programming.
Thus, consistency checking and computation of new
spatial relations could be performed. An extension
of the complex event processing framework ETALIS
implements our approach. We demonstrate it’s use in
a restaurant scenario and could show how qualitative
spatial reasoning can support tasks of mobile robots.
ACKNOWLEDGEMENTS
This work is supported by the RACE project, grant
agreement no. 287752, funded by the EC Seventh
Framework Program theme FP7-ICT-2011-7.
REFERENCES
Antoniou, G. and Harmelen, F. V. (2003). Web Ontology
Language: OWL. In Handbook on Ontologies in In-
formation Systems, pages 67–92. Springer.
Bhatt, M., Dylla, F., and Hois, J. (2009). Spatio-
terminological inference for the design of ambient en-
vironments. In COSIT, pages 371–391.
Dijkstra, E. W. (1959). A note on two problems in connex-
ion with graphs. Numerische Mathematik, 1:269–271.
Goyal, R. K. (2000). Similarity assessment for cardinal di-
rections between extended spatial objects. PhD thesis,
The University of Maine. AAI9972143.
Katz, Y. and Grau, B. C. (2005). Representing qualitative
spatial information in owl-dl. In Proceedings of the
OWL: Experiences and Directions Workshop. Galway.
Levesque, H. and Lakemeyer, G. (2007). Cognitive
Robotics. In van Harmelen, F., Lifschitz, V., and
Porter, B., editors, Handbook of Knowledge Represen-
tation. Elsevier.
Randell, D. A., Cui, Z., and Cohn, A. G. (1992). A spatial
logic based on regions and connection. In Proceedings
3rd International Conference On Knowledge Repre-
sentation and Reasoning.
Renz, J. and Nebel, B. (2007). Qualitative spatial rea-
soning using constraint calculi. In Aiello, M., Pratt-
Hartmann, I., and van Benthem, J., editors, Handbook
of Spatial Logics, pages 161–215. Springer.
Rost, P., Hotz, L., and von Riegen, S. (2012). Support-
ing Mobile Robot‘s Tasks through Qualitative Spatial
Reasoning. In Bernard, A. e. a., editor, 9th Interna-
tional Conference on Informatics in Control, Automa-
tion and Robotics. upcoming.
Tsang, E. (1993). Foundations of Constraint Satisfaction.
Academic Press, London, San Diego, New York.
Vangelis Vassiliadis, Chris Mungall (2012). A toolbox for
Qualitative Spatial Reasoning in applications. http://
www.semanticweb.gr/thea/index.html. Date: March,
10th 2012.
KEOD2012-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
380
