
Combined Input Training and Radial Basis Function Neural Networks
based Nonlinear Principal Components Analysis Model
Applied for Process Monitoring
Messaoud Bouakkaz and Mohamed-Faouzi Harkat
University Badji Mokhtar-Annaba, P. O. Box 12, Annaba 23000, Algeria
Keywords:
Nonlinear PCA, IT-net, RBF-neural Network, Process Monitoring, Fault Detection and Isolation.
Abstract:
In this paper a novel Nonlinear Principal Component Analysis (NLPCA) is proposed. Generally, a NLPCA
model is performed by using two sub-models, mapping and demapping. The proposed NLPCA model consists
of two cascade three-layer neural networks for mapping and demapping, respectively. The mapping model is
identified by using a Radial Basis Function (RBF) neural networks and the demapping is performed by using
an Input Training neural networks (IT-Net). The nonlinear principal components, which represents the desired
output of the first network, are obtained by the IT-NET. The proposed approach is illustrated by a simulation
example and then applied for fault detection and isolation of the TECP process.
1 INTRODUCTION
Principal component analysis (PCA) is among the
most popular methods for extracting information
from data, which has been applied in a wide range
of disciplines. In process monitoring with Principal
component analysis, PCA is used to model normal
process behavior and faults are then detected by ref-
erencing the measured process behavior against this
model.
It is known that the multivariate projection tech-
nique of PCA is linear, therefore it is only applica-
ble for extracting information from linearly correlated
process data. However, many industrial processes ex-
hibit nonlinear behavior. For such nonlinear systems,
linear PCA is inappropriate to describe the nonlinear-
ity within the process and it can produce excessive
number of false alarms or alternatively, missed detec-
tion of process faults, which significantly compromise
the reliability of the monitoring systems.
To cope with this problem, extended versions of
PCA have been developed such as Nonlinear PCA
(NLPCA). Whilst linear PCA identifies the linear cor-
relations between process variables, the objective of
nonlinear PCA is to extract both linear and nonlinear
relationships. Hastie and Stuetzle (Hastie and Stuet-
zle, 1989), proposed a principal curve methodology
to provide a nonlinear summary of a m-dimensional
data set. However, this approach is non-parametric
and can not be used for continuous mapping of new
data. To overcome the parametrization problem, sev-
eral nonlinear PCA based on neural networks have
been proposed (Kramer, 1991), (Dong and McAvoy,
1996), (Tan and Mavrovouniotis, 1995).
Tan and Mavrovouniotis (Tan and Mavrovounio-
tis, 1995) formulated an alternative scheme of non-
linear PCA based on an input-training neural network
(IT-Net). Under this approach, only the demapping
section of the NLPCA model is considered.
Compared with the other neural networks, when
it is in training, its inputs which represent the desired
principal component are not fixed but adjusted simul-
taneously with the internal network parameters, and
it can perform all functions of a five layer neural net-
work. However, IT-Net has its own limitation. For
example, for a new data set or observation, calcula-
tion of its corresponding nonlinear principal compo-
nent require more computation due to the necessity of
an on-line nonlinear optimizer.
To improve this approach, a NLPCA model com-
binin a principal curve algorithm (Hastie and Stuetzle,
1989) and two cascade three-layer neural networks is
proposed to identify mapping and demapping models
(Dong and McAvoy, 1996).
Harkat et al. (Harkat et al., 2003) proposes a
similar approach which uses two RBF networks for
nonlinear principal component mapping and demap-
ping, respectively. First, the principal curve algo-
483
Bouakkaz M. and Harkat M..
Combined Input Training and Radial Basis Function Neural Networks based Nonlinear Principal Components Analysis Model Applied for Process
Monitoring.
DOI: 10.5220/0004152304830492
In Proceedings of the 4th International Joint Conference on Computational Intelligence (NCTA-2012), pages 483-492
ISBN: 978-989-8565-33-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

rithm is used to estimate the principal components.
Then supervised learning is used to train the two RBF
networks. The methodology proposed in this paper
avoids the use of the principal curve algorithm by re-
placing the RBF demapping network with an IT-Net,
which is able to estimate the principal components
during learning.
The NLPCA approach proposed in this study uses
SPE index for fault detection. In the linear version of
PCA, the reconstruction approach, which tries to re-
construct the i
th
variable from all other variables, is
used for fault isolation (Dunia et al., 1996). Based
on the same idea, we develop a nonlinear version
of reconstruction approach using NLPCA model for
fault isolation and reconstruction of the faulty mea-
surements as in the linear case (Harkat et al., 2003),
(HAR, ).
The outline of this paper is as follows. Sec-
tion 2 presents a Principal Component Analysis ap-
proach. Section 3 gives briefly reviews of some ex-
isting NLPCA methods. Section 4 describes the pro-
posed NLPCA model combining the IT-Net and RBF
neural networks. Section 5 describes the detection
and isolation approach. Section 6 give an illustration
example while section 7 gives the results of applica-
tion of the proposed approach to the Tennessee East-
man process, and finally conclusions are presented in
the last section.
2 PRINCIPAL COMPONENT
ANALYSIS (PCA)
Principal component analysis (PCA) is a dimension
reduction technique used in multivariate statistical
analysis which deals with data that consist of mea-
surements. The number of variables in such cases is
often impracticably large, and one way to reducing it
is to take linear combinations of variables and discard
those with small variances. PCA looks for a few lin-
ear combinations which can be used to summarize the
data while losing as little information as possible.
Let X represents a N × m matrix of data. PCA is
an optimal factorization of X into matrix T (princi-
pal components N × ℓ) and P (loadings m × ℓ) plus a
matrix of residuals E (N × m).
X = TP
T
+ E (1)
where ℓ is the number of factors (ℓ < m). The Eu-
clidean norm of the residual matrix E must be min-
imized for a given number of factors. This criterion
is satisfied when the columns of P are eigenvectors
corresponding to the ℓ largest eigenvalues of the co-
variance matrix of X. PCA can be viewed as a linear
mapping from ℜ
m
to a lower dimensional space ℜ
ℓ
.
The mapping has the form
t = P
T
x (2)
where x
T
represents a single row of X and t
T
rep-
resents the corresponding row of T. The loadings P
are the coefficients for the linear transformation. The
projection can be reversed back to ℜ
m
with
ˆ
x = Pt (3)
where
ˆ
x is the estimated vector of data.
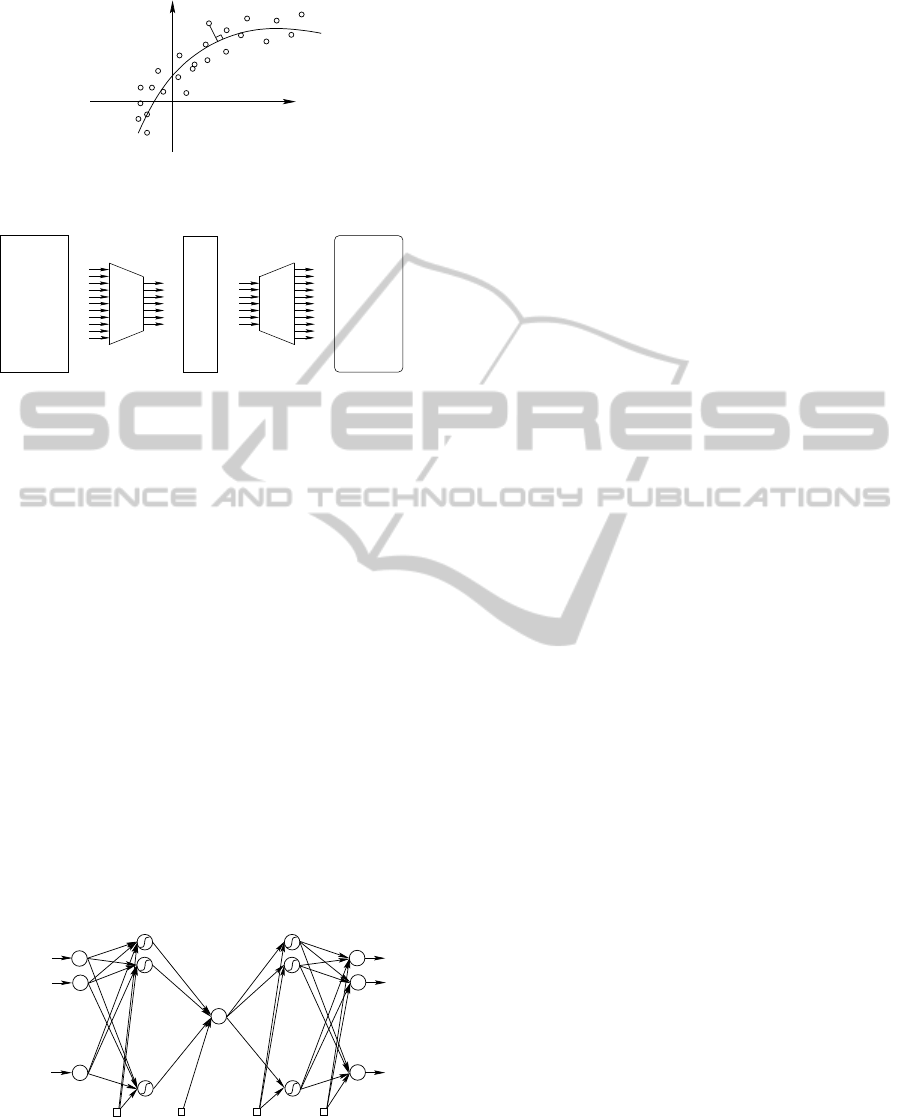
Nonlinear PCA is an extension of linear PCA. Whilst
PCA identifies linear relationships between process
variables, the objective of nonlinear PCA is to extract
both linear and nonlinear relationships. This general-
ization is achieved by projecting the process variables
down onto curves or surfaces (Fig.2) instead of lines
or planes (Fig.1).
In both cases the objective function to be mini-
mized is the sum of squared orthogonal deviations:
min
N
∑
i=1
kx
i
−
ˆ
x
i
k
2
= min
N
∑
i=1
kx
i
− F (G (x
i
))k
2
(4)
where x
i
is the ith row of X, G is the mapping func-
tion and F represents the demapping function. In this
case, the nonlinear mapping has the form
t = G (x) (5)
and the inverse transformation is implemented by the
second nonlinear vector function F that has the form
ˆ
x = F (t) (6)
Given an N × m matrix representing N measurements
made on m variables, reduction of data dimensional-
ity aims to map the original data matrix to a much
smaller matrix of dimension N × ℓ (ℓ < m), which is
able to reproduce the original matrix with minimum
distortion through a demapping projection. The re-
duced matrix describes principal component variables
extracted from the original matrix (Fig.3).
x
1
x
2
Figure 1: The linear principal component minimizes the
sum of squared orthogonal deviations using a straight line.
We provide in the next a brief overview of neu-
ral network based NLPCA proposed over the last two
decades and its implementation.
IJCCI2012-InternationalJointConferenceonComputationalIntelligence
484
x
1
x
2
Figure 2: The nonlinear principal component minimizes the
sum of squared orthogonal deviations using a smooth curve.
X ∈ ℜ
N×m
ℓ
ˆ
X ∈ ℜ
N×m
Mapping function
m
T ∈ ℜ
N×ℓ
ℓm
Demapping funtion
Figure 3: Reduction of data dimentionality.
3 NONLINEAR PCA
The objective, is to extract the nonlinear information
from the nominal data set, namely, how to find ma-
trix of nonlinear principal component scores T and a
suitable nonlinear function F (t) to satisfy the equa-
tion (4). In this field, many neuronal NLPCA ap-
proaches have been developed, (Hastie and Stuet-
zle, 1989), (Kramer, 1991), (Tan and Mavrovounio-
tis, 1995), (Dong and McAvoy, 1996), (Harkat et al.,
2003).
3.1 Five-layer Neural Network based
NLPCA
To perform NLPCA, the Neural Network in Fig.4
contains three hidden layers of neurons between the
input and output layers of variables (Kramer, 1991).
x
m
(k)
ˆx
1
(k)
ˆx
2
(k)
ˆx
m
(k)
t
1
(k)
v
(x)
11
v
(x)
mr
w
(x)
r
w
(t)
r
w
(x)
1
w
(t)
1
b
(x)
¯
b
(x)
b
(t)
v
(t)
rm
v
(t)
11
¯
b
(t)
x
1
(k)
x
2
(k)
Figure 4: Five-layer NLPCA neural network for extraction
one nonlinear principal component.
A transfer function G
1
maps from x, the input col-
umn vector of length m, to the first hidden layer, rep-
resented by h
(x)
, a column vector of length r, with
elements
h
(x)
j
= G
1
m
∑
i=1
v
ij
(x)
x
j
+ b
(x)
j
!
(7)
The mapping function G is defined as
t = G (x) =
r
∑
j=1
w
(x)
j
h
(x)
j
+
¯
b
(x)
(8)
Next, a transfer function F
1
maps from t to the
final hidden layer h
(t)
, a column vector of length r,
with elements
h
(t)
j
= F
1
w
(t)
j
t + b
(t)
j
(9)
and the demapping function F is given by
ˆx = F (t) =
r
∑
j=1
v
(t)
ji
h
(t)
j
+
¯
b
(x)
i
(10)
where ˆx representing the estimation vector of the orig-
inal data x The transfer functions G
1
and F
1
are gen-
erally nonlinear. The MSE (mean square error) be-
tween the neural network output ˆx and the original
data x is minimized by finding the optimal values of
V
(x)
,b
(x)
, w
(x)
,
¯
b
(x)
, w
(t)
, b
(t)
, V
(t)
and
¯
b
(t)
.
3.2 Three-layer Neural Network
NLPCA
Dong and McAvoy (Dong and McAvoy, 1996) pre-
sented an NLPCA method which integrates the prin-
cipal curve algorithm and neural networks. The basic
idea is to reduce the five-layer auto-associative net-
work to a three-layer networks. In a such approach,
two three-layer neural networks have been used. The
inputs of the first neural network are the original data,
and the outputs are the nonlinear principal scores ob-
tained by principal curves. The inputs of the second
network inputs are the ℓ nonlinear principal scores ob-
tained by principal curves, and the outputs are the cor-
rected data. Each neural network can be trained sepa-
rately by any appropriate algorithm.
3.3 RBF-NLPCA Model
The nonlinear principal component analysis model
for mapping and demapping can be obtained by us-
ing two RBF-Networks (Fig.5) and (Fig.6).
To identify the RBF-NLPCA model, we determi-
nate the parameters of radial basis functions (centers
and dispersions) and the weight parameters for the
two RBF-networks. It should be noted that the nonlin-
ear principal component matrix T being unknown, the
CombinedInputTrainingandRadialBasisFunctionNeuralNetworksbasedNonlinearPrincipalComponentsAnalysis
ModelAppliedforProcessMonitoring
485

.
.
.
.
.
.
t
ℓ
x
m
x
1
x
2
φ
r
φ
2
φ
1
w
11
w
r1
t
1
t
2
1
Figure 5: RBF-Network for mapping from ℜ
m
→ ℜ
ℓ
.
.
.
.
.
.
.
ˆx
m
ˆx
2
ˆx
1
v
11
ψ
2
ψ
1
v
01
1
ψ
k
v
mk
t
ℓ
t
1
t
2
Figure 6: RBF-Network for mapping from ℜ
ℓ
→ ℜ
m
.
training of the two RBF-networks separately is then
impossible.
To overcoming this problem, two solutions have
been proposed for estimating nonlinear principal
component (Webb et al., 1999), (Harkat et al., 2003).
The difference between the two methods is how to
calculate the nonlinear principal component neces-
sary for training of the two RBF neural networks. In
the first solution, proposed by Webb (Webb et al.,
1999), use the maximizing of the variance (Webb
et al., 1999), and the second is the combining the
RBF-networks and principal curves.
1. Webb (Webb et al., 1999) proposed an approach to
nonlinear principal component analysis using ra-
dial basis function (RBF) networks. The first net-
work projects data onto a lower dimension space
Fig.5, such that the nonlinear features are captured
in the sense of variance maximization of its out-
puts. So, Network parameters are determined by
the solution of a generalized symmetric eigenvec-
tor equation by maximizing the variance of its out-
puts and then nonlinear principal components are
the outputs given by this identified network.
By preserving the original dimension of the data,
the second network try to perform the inverse
transformation Fig.6 (reproducing the original
data) by minimizing the squared prediction error
between the original data samples and its corre-
sponding outputs. The two networks are trained
separately and the outputs of the first one are the
inputs of the second.
However, the optimization task of the first net-
work become so difficult because for this opti-
mization we need to minimize estimation error
which lead to train the second RBF-network and
compare its outputs to the inputs of the first one.
2. The nonlinear component matrix T is estimated
by using the principal curve algorithm (Hastie
and Stuetzle, 1989), (Verbeek, 2001). Then, each
RBF-network can be trained separately. So, the
training problem is transformed into two classical
nonlinear regression problems. We consider the
RBF neural network illustrated in Fig.5. The aim
is to use this network to define the nonlinear func-
tion G (.) : ℜ
m
→ ℜ
ℓ
of x ∈ ℜ
m
. The outputs are
computed as a linear weighted sum of the hidden
node outputs:
t
j
= G (x) =
r
∑
i=1
w
ij
φ
i
(x) (11)
Where t is the output vector of ℓ outputs,
(w
ij
, i = 1, ···i, ··· r) are the output layer weight
parameters matrix W elements to be deter-
mined, connecting hidden node i to output j,
and (
φ
i
, i = 1, ···i, ··· r) is the gaussian function
given by:
φ
i
(x) =
kx− c
i
k
2
2
σ
2
i
(12)
Where c
i
and
σ
2
i
respectively denote centers and
dispersions, In this paper, the centers, c
i
are ob-
tained with C Fuzzy-means clustering method and
the dispersions
σ
2
i
are determined as the dis-
tance between c
i
and the closest c
j
(i 6= j, j =
{1, ··· ,r}). So the training of the first network
needs only to update the parameter weights. The
parameter weights are obtained by a least square
solution minimizing according to definition (13).
w = (
φ
T
φ
)
−1
φ
T
T (13)
Where the i
th
column of
φ
T
is
φ
(x
i
) and
φ
(.) =
(
φ
1
,··· ,
ϕ
i
,··· ,
φ
r
), w
T
= (w
1
,··· ,w
r
) , and the
i
th
column of T
T
is t
i
.
By preserving the original dimension of the data,
the second network tries to perform the inverse
transformation from the reduced data (Fig. 6). We
define the inverse transformation F : ℜ
ℓ
→ ℜ
m
:
IJCCI2012-InternationalJointConferenceonComputationalIntelligence
486

ˆx
i
= F (t) =
k
∑
j=1
v
ji
ψ
j
(t) + v
0
(14)
for some radial basis
ψ
j
, ( j = 1,...,k), weights
V = (v
0
,...,v
k
), where k is the number of kernels
and v
i
∈ ℜ
ℓ
, (i = 0, . . . , k).
The NLPCA model training procedure involves
three steps (Harkat et al., 2003):
1. Find principal curves by successively applying
the principal curve algorithm (Hastie and Stuet-
zle, 1989), (Verbeek, 2001) to observed data and
residuals. Then in the first step T
1
denotes the first
nonlinear principal component, so: X = F
1
(T
1
)+
E
1
, where E
1
is the residual. When more than
one nonlinear principal component is needed we
do the same calculation from the residual data
(LeBlanc and Tibshirani, 1994).
2. Train an RBF network that maps the original
data onto the nonlinear principal components (ob-
tained by the principal curves algorithm).
3. Train the second RBF network that maps the non-
linear principal componentsonto the original data.
3.4 IT-Net NLPCA
Compared with the other neural networks, the IT-Net
has its own features, when it is in training, its in-
puts are not fixed but adjusted simultaneously with
internal network parameters (linking weights between
each layer and active bias of each node). IT-Net alter-
nates between improving model parameters for given
inputs and finding the optimal inputs for given model
parameters. For a trained IT-Net, its final inputs con-
sist of the matrix of nonlinear principal component
scores T and at the same time IT-Net approximates
the nonlinear function (6).
To perform NLPCA based IT-Net, the structure
presented in Fig.7, contains one hidden layer between
input and output layers.
Let, V ∈ ℜ
r×ℓ
, b
1
∈ ℜ
r×1
, W ∈ ℜ
m×r
, and b
2
∈
ℜ
m×1
be the weights from the input layer to the hid-
den layer, biases of the nodes in the output layer, the
weights from the hidden layer to the output layer and
the biases of the neurons in the hidden layer, respec-
tively. For the IT-Net (Fig.7) with linear nodes in both
the input and output layer, and a nonlinear function in
hidden layer, a suitable function is sigmoid (
σ
):
A transfer function
σ
maps from t (input column
vector of length ℓ) to the hidden layer, represented by
h (column vector of length r), with elements,
h
j
=
σ
ℓ
∑
i=1
v
ji
t
i
+ b
1j
!
(15)
t
1
(k)
t
2
(k)
v
11
w
11
ˆx
1
(k)
ˆx
2
(k)
ˆx
m
(k)
b
1
b
2
w
rm
t
ℓ
(k)
∆t
v
ℓr
Figure 7: Structure of IT-Net.
where t
i
represents the elements of the input vector
t. The IT-Net outputs
ˆ
x representing the approxima-
tion of the original data x, a column vector of length
m, with elements:
ˆ
x(k)
k
=
r
∑
i=1
w
ji
h
j
+ b
2j
!
(16)
So, the demapping function is defined as follow:
F (t) = W (
σ
(Vt + b
1
)) + b
2
(17)
In this study, we propose to use a gradient descent
back propagation algorithm with momentum
η
and
adaptive learning rates r
t
, r
w
, r
v
, r
b1
, and r
b2
to update
the inputs, the weights between each layer, and active
bias of each hidden layer node. The steepest descent
directions for the optimization of the network weights
are defined as follow:
∂
J
∂
w
kj
= (x
k
− ˆx
k
)h
j
(18)
∂
J
∂
v
ji
=
m
∑
k=1
(x
k
− ˆx
k
)w
kj
dh
j
t
i
(19)
The steepest descent direction for the optimization
of the network inputs is defined as follow:
∂
J
∂
t
i
=
m
∑
k=1
(x
k
− ˆx
k
)
r
∑
j=1
w
kj
dh
j
v
ji
(20)
where
dh
j
=
σ
′
ℓ
∑
i=1
v
ji
ti+ b
1j
!
(21)
Then the inputs and parameters of IT-Net can be
updated according to the following equations:
∆t
i
(k+ 1) = r
t
(1−
η
)
∂
J
∂
t
i
(k)
+
η
(∆t
i
(k)) (22)
∆w(k+ 1) = r
w
(1−
η
)
∂
J
∂
w(k)
+
η
(∆w(k)) (23)
CombinedInputTrainingandRadialBasisFunctionNeuralNetworksbasedNonlinearPrincipalComponentsAnalysis
ModelAppliedforProcessMonitoring
487

∆v(k+ 1) = r
v
(1−
η
)
∂
J
∂
v(k)
+
η
(∆v(k)) (24)
∆b
1
(k+ 1) = r
b1
(1−
η
)
∂
J
∂
b
1
(k)
+
η
(∆b
1
(k))
(25)
∆b
2
(k+ 1) = r
b2
(1−
η
)
∂
J
∂
b
2
(k)
+
η
(∆b
2
(k))
(26)
where
∆T
Nℓ
(k+ 1) = T
Nℓ
(k+ 1) − T
Nℓ
(k) (27)
∆z(k+ 1) = z(k+ 1) − z(k) (28)
where z represents each internal network parameter.
where adaptive learning rates r
t
, r
z
are adapted as pro-
posed in (Zhu and Li, 2006).
r
z
(k) = 2
λ
z
r
z
(k− 1) (29)
λ
z
(k) = sign
∂
J
∂
z(k)
∂
J
∂
z(k− 1)
(30)
r
t
(k) = 2
λ
t
r
t
(k− 1) (31)
λ
t
(k) = sign
∂
J
∂
t(k)
∂
J
∂
t(k− 1)
(32)
Where,
∂
J
∂
t
and
∂
J
∂
z
are steepest descent direction
for optimizing network inputs and weights between
each layer, respectively, and
∂
J
∂
t
Nℓ
(k−1)
and
∂
J
∂
z(k−1)
are
its previous steepest descent directions.
3.5 IT-Net Algorithm
The algorithm of IT-Net can follows the following
steps:
1. Initialization: Scaling each variable of X matrix
to zero mean and unit variance, initialize input
matrix T of scaled X, and weights (W andV), bias
(b
1
and b
2
) with random values in the range [0 1].
2. Computation: For each input t
ki
, (i=1,2,.....,ℓ)
and (k = 1, ...., N), calculate the corresponding IT-
Net output ˆx
kj
, ( j = 1,2, ....., m) by using (16) and
calculate the errors between the output and the
scaled x,
3. Update: the weightsW,V, b
1
, b
2
and input vector
t by using equations (18) to (32),
4. For next input t
(k+1)i
, i = (1, 2,.....,ℓ) , repeat Step
2 to Step 3 until all inputs have been adjusted and
calculate the total error between the outputs ˆx and
the scaled sample x. if the maximum number of
epochs (repetitions) is reached or if the error is
smaller than aim error, and at the same time the
error does not change any more, exit the iteration.
Otherwise, go to the next step,
5. Repeat: the iteration from Step 2 to Step 4. Af-
ter the iteration is finished, we acquire the input
matrix T and a neural network model with fixed
weights.
For a new observation, to calculate its correspond-
ing nonlinear component requires the application of
a new training of network, but we do not need to train
the weights any more (fixed values) but only train in-
puts. The new input can be viewed as the nonlinear
principal component of the testing sample, which is
time consuming and can not be used in on-line pro-
cess monitoring.
4 THE PROPOSED NLPCA
MODEL
To take advantage of the Radial Basis Functions
(RBF) (Fig.5) and Input Training neural networks (IT-
Net) (Fig.7), a new NLPCA model combining these
two neural networks is proposed for fault detection,
isolation and reconstruction. These two networks are
used in cascade. The first RBF neural network is used
for mapping and the IT-Net for demapping, respec-
tively. The proposed method involves two steps :
1. Find nonlinear principal components T by train-
ing the IT-Net, at convergence we have also the
demapping function F ,
2. Train the RBF network that maps the original data
to nonlinear principal components (obtained from
the IT-Net).
5 FAULT DETECTION AND
ISOLATION
5.1 Fault Detection
Abnormal situations that occur due to sensor drifts
induce changes in sensor measurements. Nonlinear
principal component analysis is used to model nor-
mal process behavior and faults are then detected by
checking the observed behavior against this model.
Once a NLPCA representation has been built from
data representing normal operation, the k
th
sample
vector x(k) may be decomposed by NLPCA into two
portions,
x(k) =
ˆ
x(k) +
˜
x(k) =
ˆ
x(k) + e(k) (33)
where vectors
ˆ
x(k) and
˜
x(k) are the estimation of
x(k) from the NLPCA model at instant k and residual,
IJCCI2012-InternationalJointConferenceonComputationalIntelligence
488

respectively. The
ˆ
x(k) is the projection on the nonlin-
ear principal component subspace according to (6).
In this paper, fault detection is performed by moni-
toring the residuals, so we use the SPE detection in-
dex (squared prediction error) which is a statistic that
measures the lack of fit of the NLPCA model to the
data. At time k, the SPE is given by:
SPE(k) = e
T
(k)e(k) =
m
∑
j=1
e
2
j
(k) (34)
where SPE(k) is the value of squared prediction
error for the k
th
sample of the process variables. Fault
detection compares the current SPE with a threshold
δ
2
, the process is considered normal if:
SPE(k) ≤
δ
2
(35)
δ
denoted the confidence limit for SPE. To improve
fault detection by reducing the rate of false alarms
(due to noise), EWMA (Exponentially Weighted
Moving Average) filter can be applied to the residu-
als. The filtered residuals e
f
are thus obtained:
e
f
(k) = (I− Λ)(e
f
(k− 1)) + Λe(k) (36)
SPE
f
(k) = e
T
f
(k)e
f
(k) (37)
where e
f
(k) and SPE
f
(k) are the filtered residuals
and SPE(k) respectively. Λ =
γ
I denotes a diagonal
matrix whose diagonal elements are forgetting factors
for the residuals. If SPE
f
(k) is above the confidence
limits, a fault is detected.
5.2 Fault Isolation and Reconstruction
After the presence of fault has been detected, it is
important to identify the fault and apply the neces-
sary correctiveactions to eliminate the abnormal data.
Like variable reconstruction approach for sensor fault
isolation proposedby Dunia (Dunia et al., 1996) in the
linear case, we propose an extension of this approach
in the nonlinear case (Harkat et al., 2007). This ap-
proach assumes that each sensor may be faulty (in
the case of a single fault) and suggests to reconstruct
the assumed faulty sensor using the NLPCA model
from the remaining measurements. By examining the
residuals given by NLPCA model before and after re-
construction, we can determine the faulty sensor.
5.2.1 Nonlinear reconstruction
For the i
th
variable, its reconstruction z
i
is defined, as
in the linear case, by an iterative approach, the esti-
mated value ˆx
i
is re-estimated by the NLPCA model
until convergence (Fig.8).
z
i
=
ξ
T
i
F (G (x
i
)) (38)
where x
i
= [x
1
x
2
... ˆx
i
... x
m
]
T
and
ξ
i
is the i
th
col-
umn of the identity matrix. The iterative expression
given by equation (38) must be started using some
better initial value z
(0)
i
. We suggest to use the mea-
sure x
i
as initial value z
(0)
i
= x
i
. Note that the recon-
struction expression (38) converge quickly converges
quickly (i.e. in one or two iterations), for all the ex-
amples that have been treated.
x
1
ˆx
1
ˆ
x
F
G
x
Figure 8: Depicts schematically an iterative reconstruction
for x
1
So, let SPE
f j
(k) be the index SPE
f
(k) calculated
after reconstruction of the j
th
variable. Therefore, if
the faulty variable is reconstructed, the index SPE
f j
is in the control limit because the fault is eliminated
by reconstruction. If the reconstructed variable is
not faulty, the index SPE
f j
being always affected by
the fault, SPE
j
is outside its control limit. In sum-
mary, when fault is detected, all indices SPE
f j
, ( j =
1, ..., m) are computed, and if SPE
f j
≤
δ
2
α
, the j
th
sen-
sor is considered as the faulty one.
6 SIMULATION EXAMPLE
We use a simple three dimensional case to illustrate
the proposed NLPCA model efficacy. Three variables
x
1
, x
2
and x
3
are functions of one parameter u, and
Gaussian noise added.
x
1
= u
2
+ 0.3sin2
π
u+
ε
1
x
2
= u+
ε
2
x
3
= u
3
+ 1+
ε
3
The
ε
i
components are independent white noise
variables, uniformly distributed over [−0.1 0.1] and u
is a variable that is defined over [−1 1]. The two net-
works are trained using 400 data point. One nonlinear
principal component is retained for this model which
explains 97% of the variance of data.
The estimated curve using the proposed NLPCA
model is shown in Fig.9. Fig.10 indicates the evo-
lution of the first nonlinear principal component ob-
tained by three NLPCA models; the proposed model
(with 1-7-3 IT-Net structure, 3-8-1 RBF structure),
Verbeek algorithm (Hastie and Stuetzle, 1989) and
five-layer neural network (Hsieh and Li, 2001).
CombinedInputTrainingandRadialBasisFunctionNeuralNetworksbasedNonlinearPrincipalComponentsAnalysis
ModelAppliedforProcessMonitoring
489

0
0.5
1
−1.5
−1
−0.5
0
0.5
1
1.5
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
3
3.5
x
1
x
2
x
3
Measurements
NLPCA IT-Net Estimation
Figure 9: Data and estimation by IT-Net for nonlinear sys-
tem
0 50 100 150 200 250 300 350 400
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
Samples Number
NLPC
NLPC Obtained By Verbeeck
NLPC Obtained By Five Layers Neural Network
NLPC Obtained By IT−Net Neural Network
Figure 10: Evolution of the first nonlinear principal compo-
nent.
For this example, Fig.11 represents the evolution
of SPE
f
in normal operating condition and in the
presence of a fault simulated on the variable x
1
from
sample 300 to 400. This fault is detected by this in-
dex.
Fig.12 indicates the time evolution of SPE
f1
,
SPE
f2
and SPE
f3
indices after reconstruction of vari-
ables x
1
, x
2
and x
3
, respectively. The SPE
f1
calcu-
lated after the reconstruction of x
1
is under its con-
trol limit which indicates that x
1
is the faulty vari-
able. Then we can reconstruct this variable in order
to give a replacement value for the faulty measure-
ments. Fig.13 shows, for variable x
1
, the fault free
measurements, the faulty measurements and the re-
placement values obtained by IT-Net and RBF neural
networks NLPCA model. It is clear, that the recon-
struction measurements are good estimations of fault
free measurements.
7 APPLICATION
The Tennessee Eastman (TECP) process shown in
Fig.14 is a simulation of a real plant, developed by
Downs and Vogel of the Eastman chemical Company
to provide a realistic simulation for evaluating process
0 50 100 150 200 250 300 350 400
0
1
2
3
4
5
6
x 10
−3
Samples number
SPE
f
0 50 100 150 200 250 300 350 400
0
0.02
0.04
0.06
0.08
Smples number
SPE
f
SPE
f
99% Control Limit
Figure 11: Fault detection for NLPCA IT-Net (a: SPE
f
plot
for normal operating conditions, b : SPE
f
plot with a simu-
lated fault on variable x
1
).)
0 50 100 150 200 250 300 350 400
0
2
4
6
x 10
−3
Filtered SPE after reconstruction of x
1
SPE
f1
0 50 100 150 200 250 300 350 400
0
0.02
0.04
0.06
0.08
Filtered SPE after reconstruction of x
2
SPE
f2
0 50 100 150 200 250 300 350 400
0
0.02
0.04
0.06
0.08
Filtered SPE after reconstruction of x
3
Sample Number
SPE
f3
Figure 12: Fault isolation and faulty variable reconstruction
(a,b,c: SPE
fi
plot after reconstruction each variable: x
1
, x
2
,
x
3
respectively.
250 300 350 400
0
0.2
0.4
0.6
0.8
1
1.2
Samples number
x
1
Faulty Variable Reconstruction
Faulty Variable
Free fault Variable
Figure 13: Faulty variable x
1
reconstruction.
control and monitoring methods, and widely used as
a source of data (Downs and Vogel, 1993), (Vogel,
1994).
The process has five major units: a reactor, a product
condenser, a vapor-liquid separator, a recycle com-
IJCCI2012-InternationalJointConferenceonComputationalIntelligence
490

Table 1: Tennessee Eastman process Variables.
Measurements Variable name Units
m
1
D Feed Kg/h
m
2
E Feed Kg/h
m
3
A+C Feed kscmh
m
4
Reactor Feed Rate kscmh
m
5
Reactor Level %
m
6
Reactor Temp
◦
C
m
7
Product Sep Underflow m
3
/hr
m
8
Stripper underflow Kpa
m
9
Stripper Temp
◦
C
m
10
Steam Flow Kg/s
m
11
Reactor Cool Temp
◦
C
m
12
Cond Cool Temp
◦
C
pressor and product stripper. The process produces
products, G and H from four reactants A, C, D and E,
also presents an inert B, and by-product F.
The process here consists of 12 manipulated vari-
ables from the controller and 41 measurements, of
which 22 are continuous and 19 compositions mea-
sured by the Gaz chromatographic measurements can
not be collected continuously. In this paper only 12
continuous outputs are used in our study as demon-
strated in table 1.
There are two important factors that should be
considered, one is that the process is nonlinear, and
the second, the process operates in different modes
(Downs and Vogel, 1993), a 50:50 G:H mass ratio,
and others are in a 10:90 and a 90:10 G:H mass ra-
tio. Here, the process is operated in mode at 90:10
mass ratio. We generate a set of data according to this
condition. NLPCA is used to model the data. The
first 400 samples are the normal data, and the next
100 samples involve data with a drift fault simulated
on the variable m
6
which mean that the relationship
among the process variables changes.
Figure 14: A diagram of the Tennessee Eastman and the
base control problem simulator.
Four (4) nonlinear principal components are re-
tained for the NLPCA model, which explains 98.68%
of the variance of data.
Based on the obtained NLPCA model, the indices
for detecting sensor faults and isolating faulty sensor
can be calculated on-line. Fig.15 shows time evolu-
tion of the squared prediction error SPE
f
for normal
operating conditions.
To apply the sensor data validationmethod (sensor
fault detection, isolation and reconstruction), a fault is
introduced for the variable m
4
between samples 400
and 500.
SPE
f
in 15 almost immediately allows to detect-
ing the fault. To identify sensor, a reconstruction ap-
proach is applied and SPE
f j
(j = 1, 2, ....12) are com-
puted. In Fig.17, the index SPE
f4
(computed after
the reconstruction of m
4
) is under its control limit.
Which indicates that the faulty variable is m
4
. Vari-
able m
4
being identified as the faulty variable, then we
can reconstruct this variable in order to give a replace-
ment valuefor the faulty measurements. Fig.18 shows
the fault-free measurements, the faulty measurements
and the replacement values obtained by reconstruc-
tion for variable m
4
. It is clear that the reconstructed
measurements are good estimations of the fault-free
measurements.
0 50 100 150 200 250 300 350 400 450 500
0
0.005
0.01
0.015
0.02
0.025
0.03
Time
SPE
f
SPE
f
Control limit 99%
Control limit 95%
Figure 15: Time evolution of SPE
f
for normal condition.
0 50 100 150 200 250 300 350 400 450 500
0
0.02
0.04
0.06
0.08
0.1
Time
SPE
f
SPE
f
Control limit 99%
Control limit 95%
Figure 16: Time evolution of SPE
f
with a fault on variable
m
4
.
8 CONCLUSIONS
In this paper we have presented a new nonlinear
principal component analysis model. The proposed
NLPCA model is obtained by combining two cas-
cade neural networks. An RBF-Network for map-
CombinedInputTrainingandRadialBasisFunctionNeuralNetworksbasedNonlinearPrincipalComponentsAnalysis
ModelAppliedforProcessMonitoring
491

0 100 200 300 400 500
0
0.05
0.1
Samples number
SPE
f1
0 100 200 300 400 500
0
0.05
0.1
Samples number
SPE
f2
0 100 200 300 400 500
0
0.05
0.1
Samples number
SPE
f3
0 100 200 300 400 500
0
0.05
0.1
Samples number
SPE
f4
0 100 200 300 400 500
0
0.05
0.1
Samples number
SPE
f5
0 100 200 300 400 500
0
0.05
0.1
Samples number
SPE
f6
0 100 200 300 400 500
0
0.05
0.1
Samples number
SPE
f7
0 100 200 300 400 500
0
0.05
0.1
Samples number
SPE
f8
0 100 200 300 400 500
0
0.05
0.1
Samples number
SPE
f9
0 100 200 300 400 500
0
0.05
0.1
Samples number
SPE
f10
0 100 200 300 400 500
0
0.05
0.1
Samples number
SPE
f11
0 100 200 300 400 500
0
0.05
0.1
Samples number
SPE
f12
Figure 17: Time evolution of SPE
fi
after reconstruction of
each the variable m
i
.
350 400 450 500
38
40
42
44
46
48
50
Time
m
6
Reconstructed Measurements
Faulty Measurements
Fault Free Measurements
Figure 18: Reconstruction of the faulty measurements.
ping function and an IT-Net for demapping function.
The principal components are calculated using the
IT-Net which represent the demapping function, then
the RBF network is trained to perform the mapping
function. This two functions determines the NPLCA
model.
An NLPCA model is built, using data obtained
when the process is under normal condition. An ex-
tension of the nonlinear reconstruction approach is
proposed. The variable reconstruction consists in esti-
mating a variable from others process variables using
the NLPCA model, i.e. using the redundancy rela-
tions between this variable and the others. This ap-
proach is presented as an extension of the reconstruc-
tion in the linear case (Dunia et al., 1996) and leads to
an iterative expression of the reconstructed measure-
ments.
The proposed approach for sensor fault detection
and isolation, using nonlinear reconstruction method,
is presented and successfully applied to a Tennessee
Eastman process. The proposed approach also gives
replacement values of faulty measurements.
REFERENCES
Dong, D. and McAvoy, T. (1996). Nonlinear principal com-
ponent analysis based on principal curves and neural
networks. Computers and Chemical Engineering 20,
65 78.
Downs, J. and Vogel, E. (1993). A plant-wide industrial
control problem. Computers and chemical engineer-
ing Journal 17, 245-255.
Dunia, R., Qin, S., Ragot, J., and McAvoy, T. (1996). Iden-
tification of faulty sensors using principal component
analysis. AIChE Journal 42, 2797-2812.
Harkat, M., Djellel, S., Doghmane, N., and Benouareth, M.
(2007). Sensor fault detection, isolation and recon-
struction using nonlinear principal component analy-
sis. Intarnational Journal of Automation and Comput-
ing, 4,.
Harkat, M., Mourot, G., and Ragot, J. (2003). Variable re-
construction using rbf-nlpca for process monitoring.
In IFAC Symposium on Fault Detection, Supervision
and Safety for Technical Process, SAFEPROCESS.
Washington, USA.
Hastie, T. and Stuetzle, W. (1989). Principal curves. Journal
of the American Statistical Association 84, 502-516.
Hsieh, W. and Li, C. (2001). Nonlinear principal component
analysis by neural networks. Tellus Journal 53A, 599-
615.
Kramer, M. (1991). Nonlinear principal component anal-
ysis using auto-associative neural networks. AIChE
Journal 37, 233-243.
LeBlanc, M. and Tibshirani, R. (1994). Adaptive principal
surfaces. Journal of American Statistical Association
89(425), 53-64.
Tan, S. and Mavrovouniotis, M. (1995). Reduction data
dimensionality through optimizing neural network in-
puts. AIChE Journal 41, 1471-1480.
Verbeek, J. (2001). A k-segments algorithm for finding
principal curves. IAS Technical Journal.
Vogel, N. R. E. (1994). Optimal steady-state operation of
the tennessee eastman challenge process. Computers
and chemical engineering Journal 19, 949-959.
Webb, A., Vlassis, N., and Krose, B. (1999). A loss function
to model selection in nonlinear principal components.
Neural Networks Journal 12, 339-345.
Zhu, Q. and Li, C. (2006). Dimensionality reduction with
input training neural network and its application in
chemical process modeling. Chinese Journal.
IJCCI2012-InternationalJointConferenceonComputationalIntelligence
492
