
Approximation of Geometric Structures with Growing Cell Structures
and Growing Neural Gas
A Performance Comparison
Hendrik Annuth and Christian-A. Bohn
Computer Graphics & Virtual Reality, Wedel University of Applied Sciences, Feldstr. 143, Wedel, Germany
Keywords:
Growing Cell Structures, Growing Neural Gas, Smart Growing Cells, Surface Reconstruction.
Abstract:
We compare Growing Cell Structures and Growing Neural Gas, which were introduced by Bernd Fritzke and
which are famous for their facilities in classification, clustering, dimensionality reduction, data visualization,
and approximation tasks. We practically test and analyze their capabilities in geometric approximation and
focusing on the application of surface reconstruction from 3D point-data. Our focus is to work out the differ-
ences of the algorithms that are especially relevant concerning approximation purposes. We address the issue
of suitable input data, their applied graphs, their topological properties, their run time complexities and we
present a summary of suggested alternations to both approaches and evaluate our results.
1 INTRODUCTION
The approximation of a geometric structure M is usu-
ally based on measured data or data received from an
analytically unknown function. The input data is a
point set P = {p
1
...p
n
} with a certain dimension n
P
which also defines the dimension of the target space
of the approximation. Therefore P = {p
1
...p
n
} ⊂
R
n
P
. The dimension n
M
of the resulting structure
M usually is a subspace of n
P
. For surface recon-
struction e.g. we have 3D Points P ⊂ R
n
P
=3
and our
resulting structure is a 2D surface so n
M
= 2. With
this definition given, a geometric approximation re-
constructs a structure M of a certain dimension n
M
greater zero from a set of points P contained in an n
P
dimensional target space. With the steady develop-
ment in scanning technologies the amount of data, the
areas of application, and the related challenges con-
stantly rises. The most common problems are noise,
none uniform sample densities, holes in the sample
data, and discontinuities of the tangent space like cor-
ners or creases which cause a huge demand for algo-
rithms that can handle such problems.
2 PREVIOUS WORK
As Geometric approximations demand stability and
robustness due to the presence of noisy data, many
neural computation techniques have been applied to
the problem as well. One of the most important works
in that area of classification and clustering is (Mac-
Queen, 1967). In the process k n
P
-dimensional refer-
ence vectors are placed in the input samples P such
that they are means of those samples. When M is
a graph M = {v
1
...v
n
} and C = {c
1
...c
n
} ∧ C ⊂
M × M where v is a reference vector and c a connec-
tion between two reference vectors. Kohonen’s self-
organizing-map (SOM) (Kohonen, 1982) and Neural
Gas (Martinetz and Schulten, 1991; Martinetz and
Schulten, 1994) are concepts that introduce M is as a
graph. Since these methods produce topologies, they
successfully can be used for reconstruction purposes.
In (Barhak and Fischer, 2002; Yu, 1999; Hoffmann
and Vrady, 1998) a SOM and in (Melato et al., 2008)
the neural gas approach is used for surface reconstruc-
tion. As the resolution of the reference vectors is
fixed the results strongly depend on the initial posi-
tions of reference vectors and the number of required
reference vectors to properly represent the underlying
geometry needs to be known in advance. Fritzke’s
Growing Cell Structures (GCS) approach (Fritzke,
1993) tracks the approximation error and adds refer-
ence vectors in areas of big approximation error and
terminates when a certain error is reached. Thus the
process does not require a previous choice of resolu-
tion. Growing neural gas (GNG) (Fritzke, 1995) also
tracks the approximation error to add new vectors and
also does not need a predetermined number of refer-
552
Annuth H. and Bohn C..
Approximation of Geometric Structures with Growing Cell Structures and Growing Neural Gas - A Performance Comparison.
DOI: 10.5220/0004157405520557
In Proceedings of the 4th International Joint Conference on Computational Intelligence (NCTA-2012), pages 552-557
ISBN: 978-989-8565-33-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

ence vectors. To establish a topology it uses competi-
tive Hebbian learning. Both methods, GCS and GNG,
have been applied to surface reconstruction success-
fully. (Vrady et al., 1999) suggested using GCS
for surface reconstruction the first time. Ivrissimtzis
presents modifications (Ivrissimtzis et al., 2003b) for
mesh smoothing and for adding and deleting refer-
ence vectors with improved connectivity properties.
With the Smart Growing Cells approach (SGC) (An-
nuth and Bohn, 2012) the GCS are enhanced with lo-
cally individual behavior to, first, account for surface
curvature through the granularity of the underlying
topology of the graph. Second, complex homeomor-
phisms can be reconstructed, and third, tangential dis-
continuities like corners and creases are reconstructed
correctly. In (Holdstein and Fischer, 2008; Do R
ˆ
ego
et al., 2010; Melato et al., 2008) GNG was used for
surface reconstruction while in (do Rego et al., 2007)
a hybrid approach using both, GCS and GNG, for sur-
face reconstruction is presented.
3 PERFORMANCE
COMPARISON
In this section we analyze similarities and differences
of both approaches, and compare their strengths and
weaknesses in the area of geometric approximation.
We use surface reconstruction in our examples since
it is a very common type of application of these algo-
rithms.
3.1 Similarities of GCS and GNG
GCS and GNG both introduce a stochastic approach
to the problem of geometric approximation. The sam-
ple points in P are accessed in a random series. This
gives the method a big advantage. At any given time
during the iterations only one data sample of P needs
to be loaded. Therefore such approaches can process
as many measured points as a modern hard drive is
able to contain. Since both algorithms are descents
from classical k-means clustering, they are both very
strong against noisy data (see Fig. 1). Their algo-
rithms are fairly simple and easy to understand. This
makes these algorithms maintainable and as both con-
cepts are actually based on data analysis they can
robustly cope with any given point constellation P .
GCS and GNG are also very flexible. While P is pro-
cessed, points could be added or deleted from P , or
regions of special interest in P could be set to a higher
likelihood within the random sample selection, which
would create a higher resolution in those areas (Hold-
stein and Fischer, 2008). The processes can also be
Figure 1: Both algorithms have a natural ability to deal with
noise data. Point Cloud (left), GCS (middle), GNG (right),
2% Gaussian noise (top) and 4% Gaussian noise (bottom).
stopped or continued at any given time during the iter-
ations. On the downside both create M as a mesh and
not as differentiable smooth approximation. Fritzke
presented a GNG concept that uses radial basis func-
tions (Fritzke, 1996), but this concept has not jet been
used for geometric approximation purposes.
3.2 Sample Points P
The approximation of a geometric structures from P
basically exposes two kinds of problems. First, not
all points in P might interpolate M due to noise or
outliers. As mentioned above section 3.1 this kind of
problems can be satisfactory handled by both algo-
rithms. Second, the amount of points that is needed
for an algorithm to create a sound surface — here
GCS and GNG differ. The basis of existence for a
structure in M and its associated topology C is carried
at different places in the algorithms. In GCS the sig-
nal counters of a reference vector determines whether
a reference vectors is deleted or not. In GNG the dele-
tion is determined by the age of the connections be-
tween reference vectors. In order for both structures
to remain they need to be hit by a sample point. As
|M | is way smaller then |C|, a GNG Graph simply
needs more points to create a equivalent approxima-
tion (see Fig. 2). In an ideal situation for M every
reference vectors has six connections. This is ideal,
because every triangle can potentially be an equilat-
eral triangle in such a constellation and the reference
vectors are as evenly distributed as possible, which is
desirable for most processes in computer graphics.
If every connection in C has two triangles on both
sides, which means the surface has no boundaries, we
can calculate the required points for both algorithms
in an ideal case. For GCS any signal counter is associ-
ated with one reference vector, in order to get a signal
at some time, |M | should not exceed the amount of
points |P |. For GNG in an ideal scenario were any
ApproximationofGeometricStructureswithGrowingCellStructuresandGrowingNeuralGas-APerformance
Comparison
553
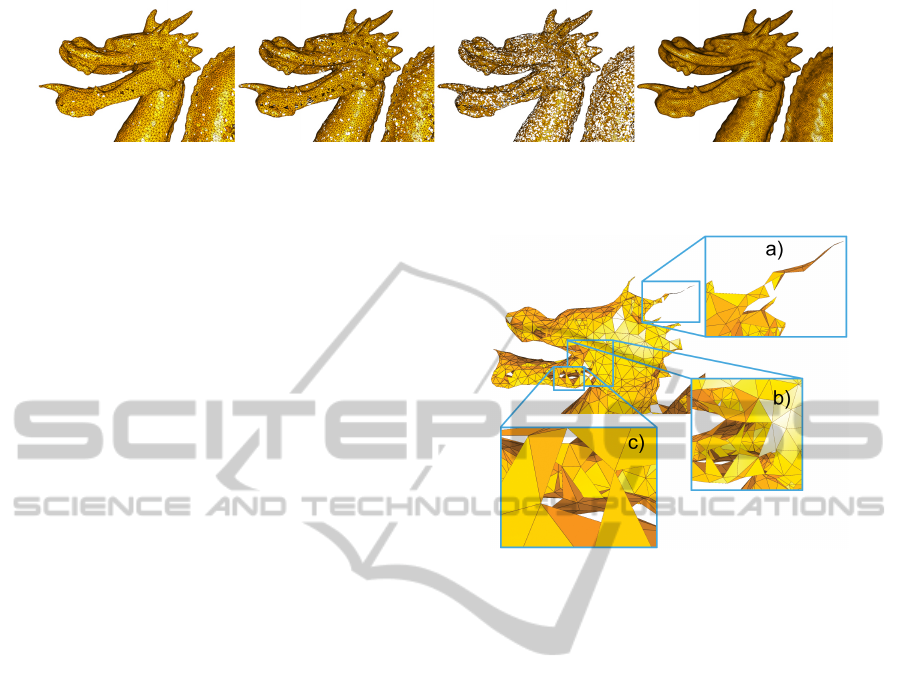
Figure 2: When the number of points in the GNG process in not sufficient to hit the connection in the graph, the structure
starts to dissolve. From left to right approximations with different numbers of reference vectors: GNG Dragon 30K, GNG
Dragon 60K, GNG Dragon 120K and GCS Dragon 120K.
vertex has six connections, which are shared by two
reference vectors |C | = 3 · |M |, so |M | can only be
a third of |P | in an ideal scenario. In (Holdstein and
Fischer, 2008) and in our tests we discovered by prac-
tical testing that the best results are created at 5% to
10% of |P |.
3.3 Graph M
For GCS and GNG M is a specific graph. GCS is
only allowed to include simplices of the previous cho-
sen dimension n
M
, while M in the case of GNG can
contain any kind of simplex that does not exceed the
dimension n
P
. If n
M
is unknown or even needs to be
a set of values, GCS is simply impractical, but in case
of geometric approximation this is seldom if ever the
case. The problem is usually the other way round. So
n
M
is known, in case e.g. of surface reconstruction
it is 2D, but in GNG M is not guaranteed to con-
sist of triangles. Therefore a post process needs to
delete or transform all structures in M with a differ-
ent dimension then 2D and those which infringe the
criteria for a manifold. Which means that a connec-
tion c ∈ C can be connected to a maximum of two
triangles. Since the process naturally creates lots of
polygons with more then three sides, the process also
needs to include a hole filling mechanism (see Fig.
3).
In our implementation we did not introduce such a
method to give an impression of the result of the ac-
tual GNG algorithm, as such a method could be im-
plemented in many different ways leading to very dif-
ferent results for M . For our Figures we will show M
as a graph of triangles, that do not have an orientation.
Neither GCS nor GNG define an oriented surface in
M . In a real world computer graphics application
however, a graph M needs to have oriented triangles.
Even so this is not part of the actual GCS definition,
all reconstruction algorithms we encountered in our
research used a graph that already includes oriented
triangles. As the surface is refined within the process,
it is always build based on pre-existing surface. This
way the orientation and gradient of a surface has a cer-
tain inertia, which enables the process to create sound
Figure 3: Different possible constellations in a GNG graph,
like a none-manifold connection that is attached to three tri-
angles a), many holes in the surface b) and connection that
rather present a volume than a surface c).
surfaces even in very challenging areas of P . If the
surface is incorrect however this inertia might prevent
surface from being corrected and an initial orienta-
tion, does not generally prevent the GCS process from
creating twisted surface (see section 3.4).
Since M is not necessarily exclusively build of trian-
gles in the GNG approach, M cannot be implemented
as a graph consisting of oriented triangles through-
out the process. Therefore refinements in M are not
based on pre-existing surface. The topology gener-
ating method in the GNG process is not guided by
previous surface stages. When the process is finished
and the necessary cleaning mechanism has been per-
formed on M the orientation of the encountered tri-
angles need to be propagated across the graph, which
can especially in noisy areas lead to twisted surface
(see (Holdstein and Fischer, 2008)). As GCS uses
a more sophisticated graph, a lot more information
can be deduced within the process, depending the sur-
face gradient or triangle properties like normal vec-
tors. This extra information can be used to augment
the algorithm (see section 3.6).
3.4 Topology C
In the following section we will focus on the algo-
IJCCI2012-InternationalJointConferenceonComputationalIntelligence
554

Figure 4: At the mouth of the Dragon the GCS process
ran in a local minimum (left). The tail of the Dragon can
not be approximated correctly, since the process was ini-
tialized with a tetrahedral, which has a different genus than
the Dragon(right).
rithms topologies. In case of GNG every topology can
be constructed, which is more a problem in the subse-
quent cleaning process. So without any modification
GNG can actually produce any demanded topology.
In case of GCS that is not the case. The surface can
only create topologies equal to the initial topology.
New added reference vectors always preserve the pre-
existing surface (this can also be an advantage section
3.3). This creates two problems, first the surface can
tangle up in a local minimum and second if P is based
on a structure of different topology, it cannot be cor-
rectly build (see Fig. 4). To choose the demanded
topology in advance, would not solve the problem,
since the process would still run into local minima
and for any approximation the topology would need
to be known in advance. The standard GCS algo-
rithm is practically unable to create approximations
for topologies of different genus. This problem how-
ever has successfully been dealt with (see section 3.6).
3.5 Run Time Complexity
Without any aide of supporting algorithms the run
time complex of both GCS and GNG is O(n
2
), where
n dependents on the finial approximation resolution
|M |. The basic step that is performed depended on
the approximation resolution |M | includes the search
for the nearest neighbor in M to a given sample point,
which naively implemented includes a distance check
to all reference vectors in M (O(n)). This search can
be improved by using an Octree, which reduces the
complexity of this search to O(logn). The basic step
also contains decreasing the collected error of all ref-
erence vectors O(n). And the adding and deletion
process includes to find the highest or lowest error
under all reference vectors O(n). This has been ad-
dressed in (Annuth and Bohn, 2010b), where a data
structure called Tumble-Tree reduces these complex-
ities to O(logn). So the overall run time complexity
of both algorithms can be reduced to O(nlogn).
Figure 5: The GCS process with the smoothing operation
(left) shows triangles that are closer to equilateral triangles,
than the standard neighbor moving technique (right).
3.6 Modification Overview
In the following sections, we want to present some
modifications that have been suggested to enhance
both approaches.
GCS: For approximations of a certain size a con-
stant error counter decreasing degree β is impractical,
because all error counters start to converge to zero.
Therefore (Ivrissimtzis et al., 2003a) introduce a dy-
namic β value. β = 1 − η
1/((γ=6)·|M |)
γ is the number of times a reference vector is allowed
to be missed, before it falls under the deletion thresh-
old η. In (Ivrissimtzis et al., 2003b) the moving of
neighbors was exchanged for a smoothing mechanism
presented by Taubin (Taubin, 1995). This increased
the overall triangle quality, measured in equilateral
triangles (see Fig. 5). In (Ivrissimtzis et al., 2003b)
the way how new reference vectors are added and
deleted is improved. The presented processes mostly
create reference vectors with six connections which
again creates more equilateral triangles. The GCS ap-
proximation creates a surface of simplices. In areas
of curved surface a higher resolution of triangles is
needed then in plane areas to reach the same approx-
imation quality. This has been issued in (Jeong et al.,
2003) where the change in normal directions has been
tracked and to add more reference vectors in such area
of much movement. In (Annuth and Bohn, 2010a) the
global curvature is set in relation to the local curvature
of a reference vector. If the local curvature is higher
signals in such an area count more, which leads to
more reference vectors in those areas. (Annuth and
Bohn, 2012) presents a general concept of enhancing
the GCS approach, the Smart Growing Cells (SGC).
The concept introduces individual behavior for the
reference vectors. That means that for different sit-
uations in the graph, the adaption process alters. The
biggest challenge is the inability of GCS to model
Surface of different genus (see Fig. 4). The presented
process in (Ivrissimtzis et al., 2003b) had no mecha-
nism to cut or coalesce the surface. In (Ivrissimtzis
et al., 2003a) the cutting of surface was triggered by
the size of triangles and then coalescing by a certain
threshold for the Hausdorff distance of two bound-
ApproximationofGeometricStructureswithGrowingCellStructuresandGrowingNeuralGas-APerformance
Comparison
555

aries. This method has two important disadvantages.
First the triangle sizes that reliably indicates misplace
surface takes quite a long time to appear and second
in case of none uniform sample densities where tri-
angle naturally have different sizes the system does
not work. Excluding those sample distributions again
would destroy a big advantage of the whole approach.
In (Annuth and Bohn, 2010a) the cutting is triggered
by a high number of connections |N
v
| of a reference
vector v. This mechanism detects misplaced surface
a lot faster and also works for none uniform sample
densities. The coalescing process happens dynami-
cally when equally oriented boundaries come close to
each other.
GNG. Both methods (Do R
ˆ
ego et al., 2010; Melato
et al., 2008) introduced an operation which changes
the amount of iterations λ before adding reference
Vectors. In (Melato et al., 2008) with increasing size
|M | they increase the size of λ. In (Do R
ˆ
ego et al.,
2010) after the demanded size |M | was reached they
introduced another learning phase, where only topol-
ogy is learned, but no additional reference vectors
were added. The reason for this operations is that the
basic reference vector adding step creates holes, be-
cause it creates reference vectors that have two con-
nections. A different approach to tackle this problem
is presented in (do Rego et al., 2007), were they mod-
ified the basic adaption step and the adding step. They
search for three instead of two closest points to a ran-
dom sample p. By that they tried to insure that the
process creates triangles rather than arbitrary dimen-
sional structures. The adding of reference vectors was
done according to the GCS method, for this M had
to be an triangle based graph. The problem with this
concept is that the connections that are made in the ba-
sic step are still arbitrary, therefore the approach still
creates cross connections and overlapping triangles.
4 RESULT
In this paper we practically compared the perfor-
mance of GCS and GNG and worked out differences
and explained their meaning towards the approxima-
tion process. In the following we show results with
different parameter modifications. To make them
comparable we used the Stanford Dragon with a fixed
resolution |M | of thirty-thousand reference vectors.
The model has uneven point densities, some detail ar-
eas like the horns and a relatively challenging from.
We measure point distance, valence, triangle quality
and the run time. The following results have been
calculated single threaded on a 2.53GHz CPU.
We measure the distance after root-mean-square
Table 1: The table shows our results for the Stanford
Dragon build of 30K reference vectors, under different cir-
cumstances.
RMS ·10
4
val Tri Qual time
Benchmark
GCS 3.83 0.900 0.785 17.3sec
GNG 8.31 0.679 0.636 6.6sec
Neighbor Move vs Smooth
GCS 5.48 0.861 0.610 13.3sec
Different # of smoothing rounds
GCS 5 4.10 0.905 0.786 40.3sec
GCS 20 4.08 0.907 0.790 234.4sec
Different λ
GNG 200 8.11 0.802 0.675 12.3sec
GCS 200 3.72 0.906 0.787 35.3sec
GNG 400 8.13 0.873 0.705 24.8sec
GCS 400 3.59 0.913 0.789 75.8sec
GNG 2000 7.84 0.944 0.750 113.4sec
GCS 2000 3.45 0.924 0.790 415.2sec
Different a
max
GNG 44 7.97 0.797 0.685 6.5sec
GNG 176 12.38 0.318 0.459 6.4sec
(RMS). As the surface of GNG is not sealed, only
points directly above or beneath triangle are included.
We define the distance one as the diagonal of the
bounding box of P . The valence of a reference vector
v is its number of it’s connections |N
v
|, we measure
the degree of reference vectors that have a valence
from five to seven. We measure the triangle quality
as the average closeness of a triangle to an equilateral
triangle. We calculate the surface area A of an trian-
gle t. Then we calculate the surface area A
2
of second
triangle t
2
. t
2
is an equilateral triangle with the side
length of the longest side of t. Then we divide A by
A
2
. In our benchmark versions we used the param-
eters as presented in (Annuth and Bohn, 2010a) and
for GNG as in (Fritzke, 1995).
In our test we investigate for GCS the neighbor
smoothing process and different values for λ. For
GNG we will use different values for λ and different
maximum lifespans for the edges a
max
(see table 1).
5 CONCLUSIONS
Both algorithms have great potential in geometric ap-
proximation, because of their resistance to noise and
none uniform sample densities and because of their
independence of sample set sizes. For structures of
mixed or unknown dimension GNG is capable of an
approximation, even so we could not think of a prac-
tical use case. Apart from that the algorithm needs in-
IJCCI2012-InternationalJointConferenceonComputationalIntelligence
556

herently more points to reconstructed an approxima-
tion of the same resolution in comparison to the GCS
approach. Thru low age
max
values triangles quality
can be gained in exchange for more holes in the sur-
face. Thru λ time can be exchanged for an overall
better approximation. We found the best trade of at
age
max
= 88 and λ = 200. GNG needs a cleaning
phase, that can only be done in a post-process. How-
ever we think that an GNG approach based on radial
base functions might has the potential to overcame
some of these disadvantages.
The GCS approach is less time efficient, which is
mostly due to its more sophisticated graph. The
smoothing operation, is also time consuming, but has
very positive effects on the valance, triangle quality
and also the distance to the points. Note that this op-
eration cannot be used for GNG, since the operation
uses triangle normals.
In our analysis of these approaches we came to the
conclusion that the progressively evolving surface in
the GCS approach and the ability to augment the pro-
cess with enhancing operations that smoothly inte-
grate in the process due to the more sophisticated base
graph makes the process is in context of geometric ap-
proximation overall to the superior technique.
REFERENCES
Annuth, H. and Bohn, C.-A. (2010a). Surface reconstruc-
tion with smart growing cells. Studies in Computa-
tional Intelligence, 321:47–66.
Annuth, H. and Bohn, C. A. (2010b). Tumble tree: reduc-
ing complexity of the growing cells approach. In Pro-
ceedings of the 20th international conference on Ar-
tificial neural networks: Part III, ICANN’10, pages
228–236, Berlin, Heidelberg. Springer-Verlag.
Annuth, H. and Bohn, C.-A. (2012). Smart growing cells:
Supervising unsupervised learning. In Madani, K.,
Dourado Correia, A., Rosa, A., and Filipe, J., editors,
Computational Intelligence, volume 399 of Studies in
Computational Intelligence, pages 405–420. Springer
Berlin / Heidelberg. 10.1007/978-3-642-27534-0 27.
Barhak, J. and Fischer, A. (2002). Adaptive reconstruction
of freeform objects with 3d som neural network grids.
Computers & Graphics, 26(5):745–751.
do Rego, R. L. M., Arajo, A. F. R., and de Lima Neto,
F. B. (2007). Growing self-organizing maps for sur-
face reconstruction from unstructured point clouds. In
IJCNN, pages 1900–1905. IEEE.
Do R
ˆ
ego, R. L. M. E., Ara
´
ujo, A. F. R., and De Lima Neto,
F. B. (2010). Growing self-reconstruction maps.
Trans. Neur. Netw., 21(2):211–223.
Fritzke, B. (1993). Growing cell structures - a self-
organizing network for unsupervised and supervised
learning. Neural Networks, 7:1441–1460.
Fritzke, B. (1995). A growing neural gas network learns
topologies. In Tesauro, G., Touretzky, D. S., and Leen,
T. K., editors, Advances in Neural Information Pro-
cessing Systems 7, pages 625–632. MIT Press, Cam-
bridge MA.
Fritzke, B. (1996). Automatic construction of radial basis
function networks with the growing neural gas model
and its relevance for fuzzy logic. In Proceedings of the
1996 ACM symposium on Applied Computing, SAC
’96, pages 624–627, New York, NY, USA. ACM.
Hoffmann, M. and Vrady, L. (1998). Free-form surfaces for
scattered data by neural networks. Journal for Geom-
etry and Graphics, 2:1–6.
Holdstein, Y. and Fischer, A. (2008). Three-dimensional
surface reconstruction using meshing growing neural
gas (mgng). Vis. Comput., 24:295–302.
Ivrissimtzis, I., Jeong, W.-K., and Seidel, H.-P. (2003a).
Neural meshes: Statistical learning methods in surface
reconstruction. Technical Report MPI-I-2003-4-007,
Max-Planck-Institut f”ur Informatik, Saarbr
¨
ucken.
Ivrissimtzis, I. P., Jeong, W.-K., and Seidel, H.-P. (2003b).
Using growing cell structures for surface reconstruc-
tion. In SMI ’03: Proceedings of the Shape Modeling
International 2003, page 78, Washington, DC, USA.
IEEE Computer Society.
Jeong, W.-K., Ivrissimtzis, I., and Seidel, H.-P. (2003).
Neural meshes: Statistical learning based on normals.
Computer Graphics and Applications, Pacific Confer-
ence on, 0:404.
Kohonen, T. (1982). Self-Organized Formation of Topolog-
ically Correct Feature Maps. Biological Cybernetics,
43:59–69.
MacQueen, J. B. (1967). Some methods for classification
and analysis of multivariate observations. pages 281 –
297.
Martinetz, T. and Schulten, K. (1991). A
¨
”Neural-Gas
¨
” Net-
work Learns Topologies. Artificial Neural Networks,
I:397–402.
Martinetz, T. and Schulten, K. (1994). Topology represent-
ing networks. Neural Networks, 7(3):507–522.
Melato, M., Hammer, B., and Hormann, K. (2008). Neural
gas for surface reconstruction. IfI Technical Report
Series.
Taubin, G. (1995). A signal processing approach to fair
surface design. In SIGGRAPH ’95: Proceedings
of the 22nd annual conference on Computer graph-
ics and interactive techniques, pages 351–358, New
York, NY, USA. ACM.
Vrady, L., Hoffmann, M., and Kovcs, E. (1999). Im-
proved free-form modelling of scattered data by dy-
namic neural networks. Journal for Geometry and
Graphics, 3:177–183.
Yu, Y. (1999). Surface reconstruction from unorganized
points using self-organizing neural networks. In
In IEEE Visualization 99, Conference Proceedings,
pages 61–64.
ApproximationofGeometricStructureswithGrowingCellStructuresandGrowingNeuralGas-APerformance
Comparison
557
