
Stereo Vision based On-road Vehicle Detection under Illumination
Changing Conditions using Self Quotient Image
Jonghwan Kim, Chung-Hee Lee and Young-Chul Lim
Daegu Gyeongbuk Institute of Science & Technology, 50-1 Sang0Ri, Hyeonpung-Myeon, Dalseong-Gun, Daegu, Korea
Keywords: Stereo Vision, Vehicle Detection, Vehicle Recognition, Self Quotient Image, Illumination Equalization.
Abstract: Today the many of automotive research groups study how to reduce vehicle accidents. For this reason, they
have been developing the advanced driver assistance system (ADAS). In ADAS, the various sensors are
used for recognizing the driving situations. For example, there are supersonic wave sensors and radar
sensors and so on. In particular, in computer vision research groups, the vision sensors (ex. CCD, IR) are
used for this. But it has some difficult problems because the vehicles are mainly driven in outdoors. The
images captured by outdoors have various illumination conditions due to weather. It makes difficulty to
detecting vehicles in images. In this paper, we introduce the vehicle detection method when the input
images of system have illumination changes. We use the self quotient image (SQI) algorithm for
illumination equalization. But SQI algorithm produces many false positive results. So we eliminate the
false-positive results using stereo vision technique. In main section, we explain this method in detail. And
we prove the proposed method has superior performance than existing systems using experiments.
1 INTRODUCTION
Every minute on average, at least one person dies in
vehicle accidents. In addition, specific information
hasn’t been known, vehicle accidents make many
casualties or property damages. According to this,
the research groups associated with automotive
industries are researching and developing various
methods for reducing vehicle accidents. One of these
is the advanced driver assistance system (ADAS).
The ADAS notifies on-road situations to the drivers
and helps their safety driving. For this, ADAS
should be able to detect the obstacles and
information of road. So, in various fields, the
researchers are developing the objects detection
system for ADAS. For example, there are the smart
parking assist system (SPAS) using ultrasonic wave
sensor, advanced smart cruise control(ASCC) using
radar sensor, night vision using infra-red(IR) sensor
and so on. In recent years, especially, the object
detecting methods using vision sensors (e.g. CCD,
CMOS) are being studied by the computer vision
researchers. But the object detecting technique in
image has some difficulties. The images from vision
sensor have many of the environmental variables
according to locations where images are taken.
Especially, vehicles are mainly driven on outdoors
and the environment of outdoor has various
illumination changes. Figure 1 shows the
illumination changing effects on vehicle’s
appearance. The images are taken continuously
when the vehicle passes under the bridge. The
vehicle appears differently by shadows and
reflections.
Figure 1: Illumination change effect.
In this paper, we introduce a vehicle detection
method when there are any changes of illumination
in image. We use captured images from driving
vehicle and the images hold the forward looking of
vehicle. Stereo camera equipped with CCD sensors
581
Kim J., Lee C. and Lim Y..
Stereo Vision based On-road Vehicle Detection under Illumination Changing Conditions using Self Quotient Image.
DOI: 10.5220/0004164605810584
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (IVC&ITS-2012), pages 581-584
ISBN: 978-989-8565-22-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

was used in the experiment and the output image
size of camera is VGA (640480). First of all, the
self quotient image (SQI) algorithm is applied to the
output image of camera. SQI algorithm has been
mainly used in the field of face recognition and
effects on illumination normalization. But SQI
decreases the contrast sensitivity of images and
decreases classification ability of the classifier also.
It makes that the classifier outputs many false-
positive results. To solve this drawback, we propose
the stereo vision technique. We set the region of
interests (ROI) using depth map from stereo camera
output. The detection window of classifier is search
on the ROI only and the false-positive results of
other region (out of ROI) are limited.
The paper is organized as follows: Section 2
analyzes the related approaches, we will explain the
SQI algorithm and stereo vision based vehicle
detection method in this section. Section 3 shows
our proposed method. The experiment results and
performance comparison are presented in Section 4.
Finally, the conclusion is described in Section 5.
2 RELATED APPROACHES
2.1 Self Quotient Image
In this subsection, we explain the Self Quotient
Image (SQI) briefly. As mentioned in the previous
section, SQI has been used in face recognition field
mainly and effects on illumination normalization.
For illumination normalization, above all, the light
analysis is needed. The light analysis is widely used
in the Retinex algorithm. The Retinex algorithm is
compensation method for images degraded by light
changing. It is based on the reflectance illumination
model like equation (1).
(1)
Where is the image, is the reflectance of the
scene and is lighting. The light is considered as the
low frequency component of image because it
mainly affects plane region of objects. So is
represented as the following equation.
(2)
We consider the F is a Gaussian filter and * is
convolution operation. According to the equation
above, of (1) can be expressed again like equation
(3).
(3)
Using the reflectance component , the SQI is
defined as follows:
(4)
Where Q is self quotient image (SQI),
is smoothing
result of input image , F is smoothing filter. Figure
2 is SQI algorithm results from Figure 1.
Figure 2: SQI results.
Like Figure 2, the results of SQI algorithm
similar to high-pass filter results. Those are same as
if they were edge-highlighted images. And we can
see the illumination changes of plane region are
removed. Especially, SQI is very effective to remove
the shadow region.
2.2 Vehicle Detection in Image
Figure 3: Stereo vision based vehicle detection.
Figure 3 shows the system flow chart that explains
the stereo vision based vehicle detection method.
This system is divided into two main parts. First part
is ROI setting. Second part is classifier learning. In
this paper, we introduce this method briefly because
this method was fully introduced in our previous
papers.
ICINCO 2012 - 9th International Conference on Informatics in Control, Automation and Robotics
582
2.2.1 ROI Setting using Stereo Vision
Like Figure 3, the stereo matching part gets two
images from stereo camera and computes the depth
information. We calculate the matching cost using
normalized cross correlation (NCC) and optimize
the matched costs using hierarchical belief
propagation (HBP). From this depth map, we
estimate the road region using U-V disparity
calculating method. From this information, we can
eliminate the road region and set the remaining blob
to ROI. Needless to say, because of depth estimation,
we can know the distance from blobs.
2.2.2 Classifier Learning
We use the AdaBoost classifier and Haar-like
feature for vehicle detection. The AdaBoost
classifier is learned by our vehicle image database.
This database is made-up by positive images and
negative images. The positive images have vehicle’s
appearances and the negative images have
backgrounds of on-road. To get better performance,
we made the image database with our hand but do
not use opened one. We set the cascade of AdaBoost
classifier to 14 levels and use the Haar-like features
that specialized in vehicles.
3 PROPOSED METHOD
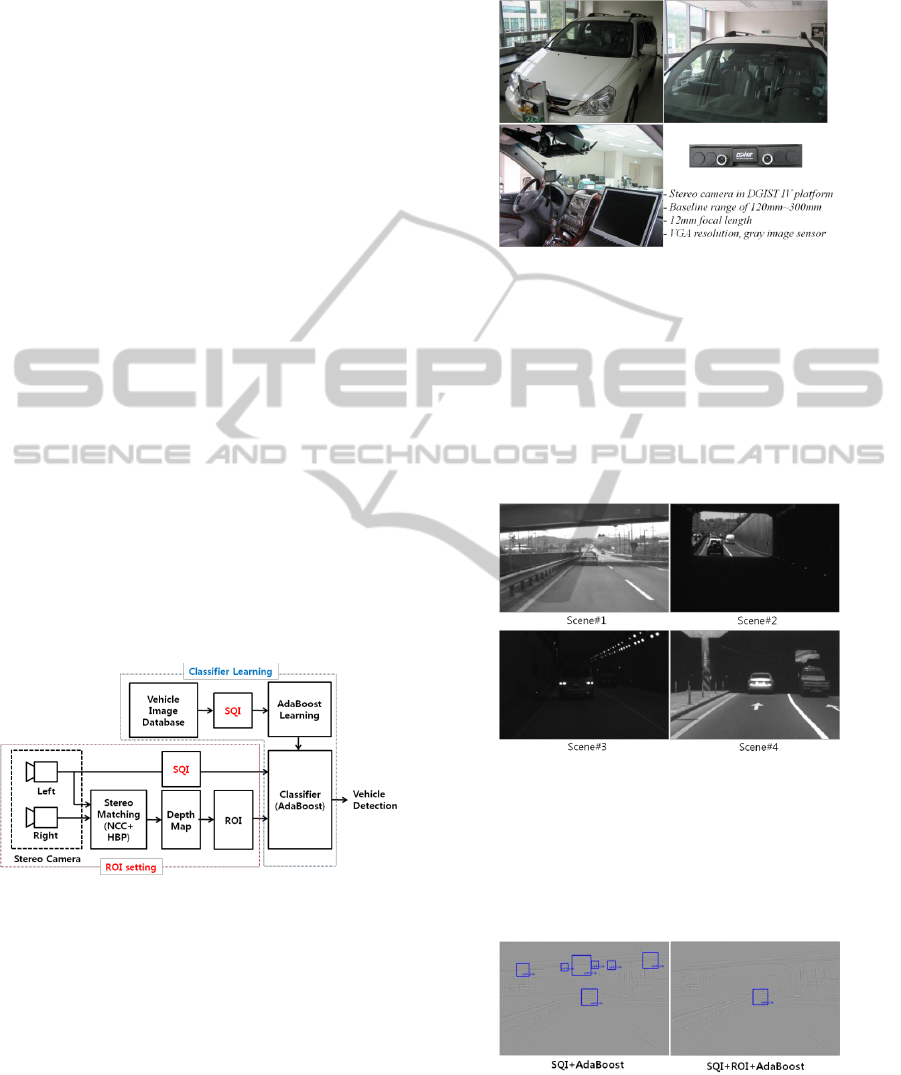
Figure 4: Proposed method.
Figure 4 shows our proposed method. In this method,
the AdaBoost classifier is learned by image database
that processed SQI algorithm. And the detection
window of classifier searches on SQI applied input
images. As we explained, the SQI has drawbacks of
making many false-positives. To overcome this, we
set the ROI using stereo vision technique like
subsection 2.2.1. In next section, experiments, we
evaluate our proposed method.
4 EXPERIMENTS
Figure 5: Our experimental vehicle and system.
Figure 5 shows our experimental environments. We
got the database and test images from stereo camera
mounted on experimental vehicle. For real-time
processing, the stereo matching part is implemented
in hardware (FPGA) and other part is implemented
in PC. The used PC has Intel® core™ i7 CPU 2.67
GHz, RAM 4.0GB and Microsoft Visual Studio
2010. For evaluation tests, we use the images below.
Figure 6: Test scenes.
Like Figure 6, the test image sets have
illumination changing condition. The scene #1 has
40 frames, the scene #2 has 150 frames, the scene #3
has 100 frames and the scene #4 has 100 frames.
Total 390 frames are used for our test.
Figure 7: Example of ROI effects.
In Figure 7, the left result have many false-
positives. Like the right result, however, our method
removes the false-positives using ROI.
Stereo Vision based On-road Vehicle Detection under Illumination Changing Conditions using Self QQuotient Image
583
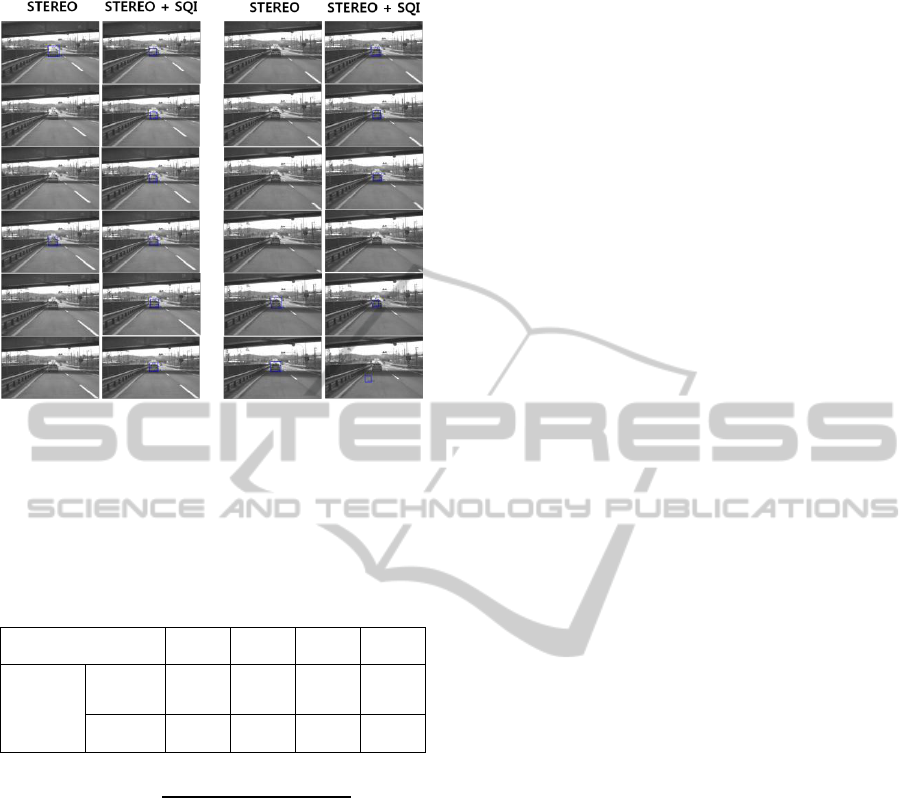
Figure 8: Example of SQI effects.
In Figure 8, the performance of proposed method
is better than the conventional one. This
experimental result can be seen in YouTube web site
(http://www.youtube.com/watch?v=sUwWvBMLPh
s).
Table 1: Evaluation results of proposed method.
Scene
#1
#2
#3
#4
F-measure
Stereo
0.786
0.712
0.669
0.754
Stereo
+SQI
0.893
0.801
0.692
0.796
(5)
Table 1 represents comparison of performance. In all
scenes, our method has better performance than the
conventional method. In general shadow region, the
performance of our method is superior. In
completely dark place like scene #3, however, the
both classifiers cannot detect the vehicles well.
5 CONCLUSIONS
We have proposed a vehicle detection method under
illumination changing conditions. In various
illumination conditions, we could see our method
has better performance than existing one. In outdoor
image, the vehicle detection must consider the
illumination effects. Our proposed method
contributes to improving performance of vehicle
detection. If this method has further improving, the
intelligent vehicle technology will be more perfect.
In this paper, we could not make accurate
performance evaluation because of lack of test
scenes. Though more tests, we will get the more
accurate results and continue to improve this method.
ACKNOWLEDGEMENTS
This work was supported by the Daegu Gyeongbuk
Institute of Science and Technology R&D Program
of the Ministry of Education, Science and
Technology Korea (11-IT-02).
REFERENCES
Sun Z., Gebis G., Miller R., 2006. On-Road Vehicle
Detection : A Review. IEEE Transactions on Pattern
Analysis and Machine Intelligence, Vol. 28, No. 5.
Wang H., Li S. Z., 2004. Face recognition under varying
lighting conditions using self quotient image. Proc. 6
th
IEEE Int. Conf. On Automatic Face and Gesture
Recognition (FGR’04).
Kim J., Lee C., Lim Y., Kwon S., Park C., 2011. Stereo
Vision-Based Improving Cascade Classifier Learning
for Vehicle Detection. Lecture Notes in Computer
Science, Advances in Visual Computing, Vol. 6939, pp.
387-397.
Kim J., Lee C., Lim Y., Kwon S., 2011. Optical Sensor-
based Object Detection for Autonomous Robots. Proc.
8
th
IEEE Int. Conf. On Ubiquitous Robots and Ambient
Intelligence (URAI 2011). ,
Kim J., Lee C., Lim Y., Kwon S., Park C., 2012.
Multithreaded Programming for Real-time Vehicle
Detection. Proc. Int. Conf. On Electronics,
Information and Communication (ICEIC 2012), pp.
194-195.
Kwon S., Lee C., Lim Y., Lee J., 2010. A Sliced
synchronous iteration architecture for real-time global
stereo matching. Proc. of SPIE-IS&T Electronic
Imaging, Vol. 7543, No. 754312-1.
Lee C., Lim Y., Kwon S., Lee J., 2011. Stereo Vision-
based Vehicle detection using a road feature and
disparity histogram. Optical Engineering Vol. 50, No.
2.
Viola P., Jones M., 2011. Rapid object detection using a
boosted cascade of simple features. Computer Vision
and Pattern Recognition, pp. 511-518 (CVPR ’01).
Van Rijsbergen C. J., 1979. Information Retrieval.
Butterworth-Heinemann, London.
ICINCO 2012 - 9th International Conference on Informatics in Control, Automation and Robotics
584
