
A NEW METHOD FOR MOVING TARGET DETECTION IN SAR
IMAGERY
Murat Hakan Yusufoglu, Mesut Kartal
Informatics Institute, Istanbul Technical University, Istanbul, Turkey
hakan.yusufoglu@gmail.com, kartalme@itu.edu.tr
Keywords: Synthetic Aperture Radar, Moving Target Detection, Shear Averaging, Sub-aperture Processing.
Abstract: This paper presents a new algorithm for detection and parameter estimation of moving targets in synthetic
aperture radar (SAR) images. The proposed algorithm is capable of detecting targets moving in both range
and azimuth directions, and also motion parameter estimation of the detected targets. This new algorithm
uses “sub-aperture processing” and “shear averaging algorithm" for detection of range and azimuth
direction movements respectively. Detection algorithm is processed in range and azimuth directions
independently; therefore, algorithm is suitable for parallel processing. In addition to this property, detection
performance and motion parameter estimation accuracy is high because of the non-sequential processing of
range and azimuth motion detection. Computer simulations gives promising results of detecting moving
targets in all directions and also extracting motion parameters of the detected target.
1 INTRODUCTION
Synthetic aperture radar technology brings new
developments in modern world. Today, numerous
SAR applications are seen in very different areas.
These applications include environmental research,
scientific, civilian and military purposes. The main
application area of SAR is aimed for detailed
imaging of specific earth terrains. By using SAR
imagery technology, any terrain image can be
collected easily. These detailed images are useful for
researching terrain properties.
Detection and motion parameter estimation of
moving targets within the observed region is also
possible by using the SAR images. Information of
detected moving objects can be used in very
different applications, such as monitoring traffic
flow (Palubinskas and Runge, 2008), observation of
military field, tracking of a specific moving target
and motion parameter estimation of the targets.
Different algorithms are proposed for detection
of moving targets. They are detecting moving targets
by using displaced phase centre antenna (Jung, 2009,
and Qin, Zhang and Dong, 2006), along track
interferometry (Kohlleppel and Gierull, 2008),
single-channel radar processing (Li, Xu, Peng and
Xia, 2006, Liu, Yuan, Gao and Mao, 2007, Kirscht,
1998, and Kirscht, 2002), and focusing algorithms
(Fienup, 2001).
As discussed by Kirscht (1998), moving targets
are appeared defocused or at wrong positions
depending on the direction of the target motion
within the SAR image. If a target moves in azimuth
direction, motion causes blurring effect in azimuth
direction, and if it moves in range direction, motion
also causes a displacement in azimuth direction or
for a higher range velocity of the target, it even
disappears (Kirscht, 1998 and Fienup, 2001). Many
algorithms are evaluated based on these blurring and
displacement effects on the images to detect moving
targets.
Our proposed algorithm is capable of detecting
targets moving not only in azimuth direction, but
also in range direction. “Sub-aperture processing”
and “shear averaging algorithm” is used to detect
moving targets in range and azimuth directions
respectively. Detection algorithm for range direction
and for azimuth direction can be processed
separately. This property gives the advantage of
using parallel processing techniques. Therefore
range and azimuth movement processes can be
completed simultaneously. Also, independent
motion detection processing of range and azimuth
movements gives more accurate detection results.
76
Yusufoglu M. and Kartal M.
A NEW METHOD FOR MOVING TARGET DETECTION IN SAR IMAGERY.
DOI: 10.5220/0005414200760079
In Proceedings of the First International Conference on Telecommunications and Remote Sensing (ICTRS 2012), pages 76-79
ISBN: 978-989-8565-28-0
Copyright
c
2012 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 THE PROPOSED ALGORITHM
In the proposed algorithm, single-channel SAR
system is considered and spotlight mode raw data is
used. A good clutter cancellation is applied before
starting the algorithm steps.
Motion effects on the SAR images as discussed
by Kirscht (1998) and Fienup (2001) are used in the
algorithm. Target motion in azimuth direction,
causes smear effect due to the motion induced phase
errors. On the other hand, target motion in range
direction causes displacement of the targets in
azimuth direction.
After all moving targets has been detected
number of detected targets, their velocities and
movement directions are reported. Range and
azimuth movement detection processes are detailed
in the following subsections.
2.1 Range Direction Movement
Detection
In the proposed algorithm, range direction
movement is detected by using sub-aperture
processing (Franceshetti and Lanari, 1999). Raw
data is divided in two equal blocks across the
azimuth direction, and two SAR images are formed.
This process provides looking to the same observed
region in two different time intervals. The first
image contains data from beginning to the divided
position of the antenna. Therefore, an image is
generated for “t” time position of the antenna. The
second image contains data from the divided
position to the end position of the antenna. So,
second image is generated for “t + 1” time position
of the antenna.
After generation of the images, these two images
are overlapped with the help of the SAR system
parameters. By taking the difference between the
two overlapped images, stationary targets will be
disappeared and only moving targets within the
observed region are detected.
After moving target has been detected, position
difference of the target between the first and the
second images gives the range direction movement
information of the target. This information is used to
extract range direction motion parameters.
2.2 Azimuth Direction Movement
Detection
Shear averaging algorithm is used for detecting
moving targets in azimuth direction. There are
numerous algorithms for detecting azimuth
movement. But shear averaging algorithm is chosen
for its sensitivity to the azimuth component of
velocity, providing very fast calculation, higher
order phase errors detection ability, and not
requiring a prominent point scatterer on the target
(Fienup, 2001).
In the algorithm, whole image is divided into
small patches. By processing each patch, moving
targets can be detected by using “shear averaging
algorithm” detailed by Fienup (1989). If good clutter
cancellation is applied at the beginning of the
algorithm, only targets will be stayed in the image.
So, moving targets can accurately be detected with
very low false alarm rate.
In the proposed algorithm, following steps are
used to detect azimuth motion.
a. Divide the image into patches.
b. Take a patch data, g(u,v).
c. Calculate G(u,v) by taking azimuth FFT of
g(u,v).
d. Calculate shear averaged quantity.
e. Calculate phase error estimate in azimuth
coordinate.
f. Make phase correction.
g. Take inverse Fourier of corrected data.
h. Calculate standard deviation of the phase
error.
i. Compare standard deviation value with the
threshold value to detect moving target.
j. If a moving target is detected, find the
azimuth velocity of the target by using the
system model.
Threshold value could be calculated by
processing either whole image or only patch data.
The whole image processing gives a fixed threshold
value. But, for good detection results in simulations,
dynamic threshold value is calculated for each patch.
In “jth” step of the algorithm, azimuth velocity is
calculated by finding the displacement of position of
maximum amplitude within the unfocused and
focused images. From simulation results, a
relationship between real target velocity and
detected target velocity is extracted and shown in
Figure 1. This relation is used as a reference system
model for the velocity estimation of the detected
targets.
By combining the range and azimuth direction
detection results, the real movement direction and
velocity of the target is calculated.
A New Method for Moving Target Detection in SAR Imagery
77

Figure 1: System model, extracted from simulation results,
is used to find the azimuth velocity estimation of moving
targets in azimuth direction.
3 SIMULATION RESULTS
The performance of the proposed algorithm is tested
with Matlab simulation. In the simulation scenario,
moving and stationary targets are put within the
simulation data. The simulated scene used in the
simulations is shown in Figure 2. Simulated SAR
system parameters are given in the Table 1.
Simulated scene contains 3 targets. Only the
rightmost target is non-stationary, and the other two
are stationary. The moving target is marked in the
images shown in Figure 3 and Figure 4. In these
figures, moving targets have a constant velocity of
3.9m/s (14km/h) only in range and azimuth
direction, respectively.
In the simulation scenarios, moving targets with
different velocities between 0.39m/s to 15.6m/s are
considered. All moving targets in the azimuth
direction are detected successfully, and target
velocities are estimated by using the system model
given in Figure 1. On the range velocity detection
process, moving targets with velocities smaller than
1.56m/s couldn’t be detected by using two sub-
apertures. But all other targets and also their
movement direction are detected successfully.
Table 1: Simulation system parameters.
Center Frequency
10 GHz
Pulse duration
1 μs
Radar PRF
200 Hz
Sampling Frequency
180 MHz
Chirp rate
1.5 x 10
14
Platform velocity
200 m/s
Slant range scene center
10 km
Resolution range
0.3 m
Resolution azimuth
0.3 m
Squint angle
0°
Scene size
200 m x 200 m
SAR image size
512x512 pixels
Number of sub-apertures
2
Aperture size (Az x Range)
256x512 pixels
Patch size (Az x Range)
128x16 pixels
Moving target velocity
3.9 m/s
Excluding targets with very low range velocities,
the moving targets are detected and separated from
stationary targets by sub-aperture processing. Also,
their motion parameters are extracted. In addition to
range direction detection results, azimuth movement,
its direction and velocity of the target are detected
successfully.
Figure 2: Simulated scene.
0
10
20
30
40
50
60
70
0 10 20 30 40
Detected target velocity
Real target velocity
First International Conference on Telecommunications and Remote Sensing
78
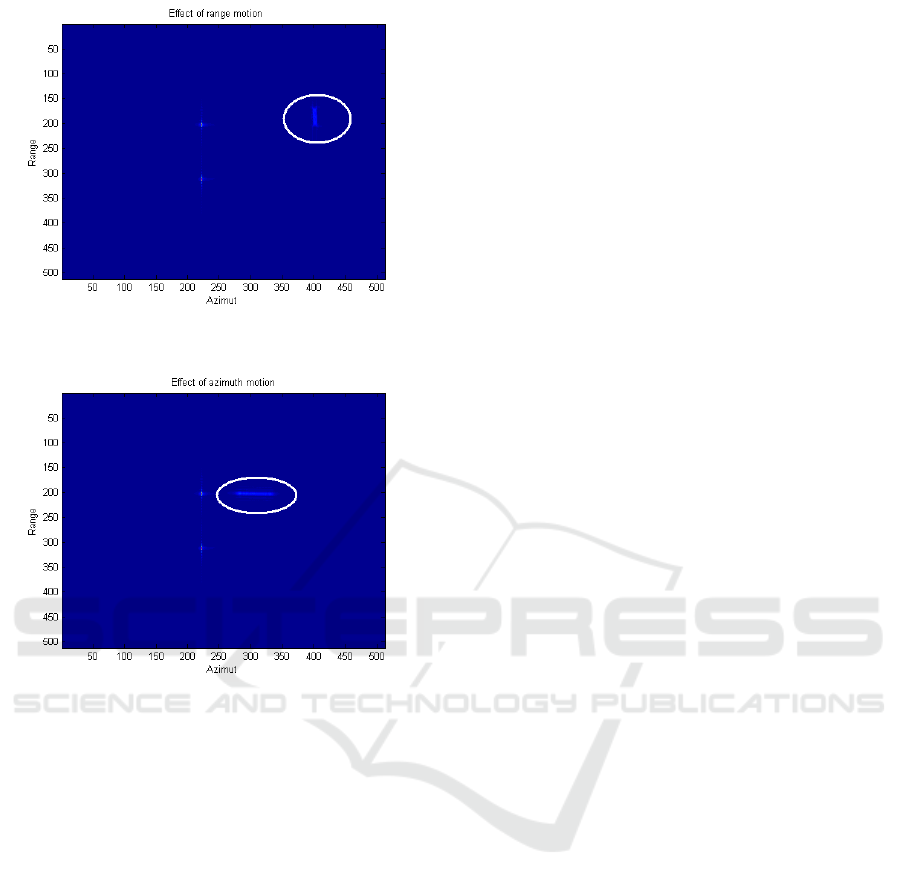
Figure 3: Range-only motion.
Figure 4: Azimuth-only motion.
4 CONCLUSION
A new algorithm for detecting both range and
azimuth motion of moving targets in SAR images is
proposed. The combination of sub-aperture
processing and shear averaging algorithms provides
the detection of the movement in all directions.
Detection algorithm is processed in range and
azimuth directions independently; therefore parallel
processing techniques could be used. By parallel
processing, moving targets can be detected very fast.
Algorithm is capable of not only moving target
detection, but also motion parameter estimation of
the moving targets. Moreover, detection
performance and motion parameter estimation
accuracy is high because of the non-sequential
processing of range and azimuth direction
movement.
REFERENCES
Fienup, J.R., 1989. Phase Error Correction by Shear
Averaging. In Optical Society of America, Signal
Recovery and Synthesis III, digest of papers.
Fienup, J.R., 2001. Detecting Moving Targets in SAR
imagery by focusing. In IEEE Transactions on
Aerospace and Electronic Systems.
Franceshetti, G. and Lanari, R., 1999. Synthetic Aperture
Radar Processing, CRC Press. London.
Jung, J.H., 2009. Ground Moving Target Displacement
Compensation in the DPCA based SAR-GMTI
System. In 2009 IEEE Radar Conference.
Kirscht, M., 1998. Detection, Velocity Estimation and
Imaging of Moving Targets with Single–Channel
SAR. In Proc. of European Conference on Synthetic
Aperture Radar, EUSAR ’98.
Kirscht, M., 2002. Detection and imaging of arbitrarily
moving targets with single-channel SAR. In RADAR
2002.
Kohlleppel, R. and Gierull, G., 2008. Enhancement of
along-track interferometry for ground moving target
indication. In International Geoscience and Remote
Sensing Symposium.
Li, G., Xu, J., Peng,Y. and Xia, X., 2006. Detection,
Velocity Estimation and Imaging of Fast Moving
Targets Using Single Antenna SAR. In International
Conference on Radar, 2006.
Liu, S., Yuan, Y., Gao, F. and Mao, S., 2007. Method of
moving target detection based on sub-image
cancellation for single-antenna airborne synthetic
aperture radar. In Journal of Systems Engineering and
Electronics.
Palubinskas, G. and Runge, H., 2008. Detection of Traffic
Congestion in SAR Imagery. In Proc. of 7th European
Conference on SAR. Fridrichshafen, Germany.
Qin, F., Zhang, X., and Dong, M., 2006. A method of
hybrid ATI and DPCA technique to detect moving
target. In CIE ’06, International Conference on Radar.
A New Method for Moving Target Detection in SAR Imagery
79
