
An Efficient Application of Gesture Recognition from a 2D Camera
for Rehabilitation of Patients with Impaired Dexterity
G. Ushaw
1
, E. Ziogas
1
, J. Eyre
2
and G. Morgan
1
1
School of Computing Science, Newcastle University, Newcastle upon Tyne, U.K.
2
Department of Child Health, Royal Victoria Infirmary, Newcastle upon Tyne, U.K.
Keywords:
Human-machine Interfaces for Disabled Persons, Image Processing and Computer Vision.
Abstract:
An efficient method for utilising a 2D camera to recognise hand gestures in 3D space is described. The
work is presented within the context of a recuperation aid for younger children with impaired movement of
the upper limbs on a standard Android tablet device. The hand movement recognition is achieved through
attaching brightly coloured models to the child’s fingers, providing easily trackable elements of the image.
The application promotes repeated use of specific hand skills identified by the medical profession to stimulate
and assess rehabilitation of patients with impaired upper limb dexterity.
1 INTRODUCTION
In this paper we describe an implementation which
recognises specific finger movements with one or two
hands, and we present results that show this solution
is viable on typical tablet hardware. This is achieved
through attaching brightly coloured models to the
subject’s fingers and tracking those bright colours as
they move.
The work was developed within the context of an
interactive storybook, consisting of a series of mini-
games encouraging a child with impaired upper limb
dexterity to perform specific hand movements. Med-
ical practitioners have identified a framework of spe-
cific hand movements which are optimum for both as-
sessment and intervention (Chien et al., 2009). The
application achieves the twin goals of running on the
kind of low power hardware typically found in a fam-
ily home, and encouraging the child to practice the
rehabilitative movements within the context of a fun
game rather than a boring chore.
2 RELATED WORK
The detection of movement in a sequential set of im-
ages is of widespread interest and the solutions are
well understood for a static camera image (Radke
et al., 2005). Real time applications may require a
rapid response to an image change. The image data
itself consists of a two-dimensional array of pixels,
each containing an n-dimensional vector of values
corresponding to an intensity or colour at that posi-
tion in the image; this recorded data will get very large
very quickly in some applications.
The goal in general, is to identify a set of pix-
els in an image which differ significantly from one
image to the next. These pixels are known as the
change mask. The algorithms become more com-
plex, and more application-specific, when attempt-
ing to classify the change masks within the seman-
tics and context of a particular problem - this is of-
ten labelled change understanding. Change under-
standing requires the system to be able to reject unim-
portant changes, while identifying relevant significant
changes - this usually involves some prior modelling
of the kind of expected changes that can occur in the
image (both significant, and for rejection). A variety
of methods are used to filter out expected insignif-
icant changes, typically taking into account lighting
changes and camera movement. When the camera
movement is small, the techniques for accounting for
it, using low-dimensional spatial transformations, are
well-understood (Zitova and Flusser, 2003). Discard-
ing changes in the image caused by inconsistent light-
ing is also well-researched (Lillestrand, 1972). It is
also commonplace to transform the images into a dif-
ferent intensity space before carrying out the motion
detection algorithms.
Once the pre-processing is complete, the search
for changes in the image can commence. The earli-
315
Ushaw G., Ziogas E., Eyre J. and Morgan G..
An Efficient Application of Gesture Recognition from a 2D Camera for Rehabilitation of Patients with Impaired Dexterity.
DOI: 10.5220/0004190103150318
In Proceedings of the International Conference on Health Informatics (HEALTHINF-2013), pages 315-318
ISBN: 978-989-8565-37-2
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

est technique was a straightforward summation of the
number of pixels comprising the change mask, with
a threshold value for what constitutes a significant
change (Rosin, 2002). Various techniques have been
employed to better define how the threshold is cho-
sen, but this simple differencing approach is unlikely
to provide as reliable results as later developments;
in particular, it is sensitive to noise and lighting vari-
ations (Lillestrand, 1972). Further development has
centred on significance and hypothesis testing, and on
predictive models, both spatial and temporal.
2.1 Gesture Recognition
Gestures are ambiguous and incompletely specified,
as they vary from one person to the next, and each
time a particular person gesticulates. Consequently,
the two main issues to resolve when recognising ges-
tures are to identify specific elements of the gesture,
and to have some prior knowledge of which gestures
to search for. Gesture recognition is achieved by ei-
ther attaching a sensor of some type to various parts of
the body, or from interpreting the image from a cam-
era. There is an inherent loss of information in inter-
preting the 2D image of a 3D space, and algorithms
which address this can be computationally expensive.
Identifying a hand gesture involves determining
the point in time when a gesture has started and
ended, within a continuous movement stream from
the hands, and then segmenting that time into recog-
nizable movements or positions. This is not a triv-
ial problem due to both the spatio-temporal variabil-
ity involved, and the segmentation ambiguity of iden-
tifying specific elements of the gesture (Mitra and
Acharya, 2007).
The use of Hidden Markov Models (HMM) has
yielded good results in gesture recognition, as ges-
tures consist of a set of discrete segments of move-
ment or position (Yamato et al., 1992). Sign language
recognition processes have been designed and imple-
mented using HMM’s (Starner and Pentland, 1996).
In the cited implementation, the user wore coloured
gloves, and the approach required extensive training
sets; it successfully recognized around fifty words
within a heavily constrained grammar set. The HMM
approach has been further developed, splitting each
gestures into a series of constituent ”visemes” (Bow-
den et al., 2004).
Gestures can also be modelled as ordered se-
quences of spatio-temporal states, leading to the use
of a Finite State Machine (FSM) to detect them (Hong
et al., 2000). In this approach each gesture is de-
scribed as an ordered sequence of states, defined by
the spatial clustering, and temporal alignment of the
points of the hands or fingers. The states typically
consist of a static start position, smooth motion to the
end position, a static end position, and smooth motion
back to the rest position. This approach is less suited
to detecting motion in small children (who tend not
to be static), and especially not those with impaired
movement ability.
2.2 Low Power Device Considerations
The key to gesture recognition in a two-dimensional
image is in identifying the parts of the image which
are relevant to the gesture, and monitoring their con-
tribution to the change mask. The quicker that the
elements of the change mask that are unrelated to
the gesture can be discarded, the more time the al-
gorithms have to process the gesture data.
Further to this, the smaller the amount of data that
is used to represent the change set, the faster the algo-
rithms for analysing that change are likely to be. Most
image capture methods used in gesture recognition re-
tain some sense of the overall image, or sections of it,
during analysis of the change set - for example, trac-
ing the movement of an edge between a section of
the image which is skin tone coloured, and a section
which is not.
A significant saving in computing power is also
made if the application has prior knowledge of which
gesture(s) it is searching for. If the algorithms need
to check for any gesture at any time, then this is dras-
tically more computationally expensive than attempt-
ing to detect a specific gesture at a particular instant
in time.
3 IMPLEMENTATION
The implementation which is described addresses the
potentially large amount of processing power required
in recognizing hand gestures in three ways.
Brightly coloured models are attached to the sub-
ject’s fingertips. This means that the image process-
ing software only needs to identify areas of specific,
pre-determined colours in the real-time moving im-
age. Further to this, the areas of specific colour are
reduced to a single coordinate per frame within the
two dimensional screen-space, which greatly speeds
up the gesture recognition process.
Each gesture which must be identified has been
designed to require tracking of no more than three fin-
gertips. This reduces the amount of data tracked from
frame to frame which again allows the algorithms to
perform on the lower power target device.
HEALTHINF2013-InternationalConferenceonHealthInformatics
316

The application is designed so that at any time it
is only searching for one specific gesture.
3.1 The Colour Space
The aim of the colour processing algorithm is to iden-
tify a single point in the image for each colour that
is being tracked. The application includes some con-
figuration and calibration routines to ensure that the
colours of the models on the fingers are identified and
are sufficiently distinct from the rest of the image.
The Android device records the colour image in
a NV21-encoded YC
r
C
b
format. The first step is to
convert this to ARGB format, so it can be stored in an
OpenCV IplImage, for further processing. It is then
straightforward to convert to the desired CIE La
∗
b
∗
colour space via RGB. For each colour of interest, a
binary image is constructed representing the presence
of that colour at that pixel in the image.
Library functions are then utilised to dilate and
erode the resulting binary image, for each colour of
interest, and further library functions are used to iden-
tify the contours around the resultant shapes. If the
number of pixels within a contour is higher than a
threshold, then the points are averaged to give a grav-
ity centre for that colour. Scaling the results according
to the window coordinates gives one point per target
colour in the 2D camera coordinate system.
3.2 The Gestures
The gestures are based on a framework of children’s
hand skills for assessment and intervention (Chien
et al., 2009), including unimanual skills, individual
finger movements, and bimanual gestures.
Bespoke algorithms have been developed to
recognise the specific movements of the coloured fin-
ger tips for each type of gesture. The algorithms are
based on interpreting the movement of gravity centres
as they change from frame to frame in the colour im-
age. A maximum of two gravity centres is required
for each gesture.
The Pinch-Grasp move involves bringing to-
gether the forefinger and thumb. Two colours are
tracked, and the pinch is identified when the distance
between them reduces below a threshold value. A re-
lease is identified when the distance increases over a
greater threshold, to ensure there is hysteresis in the
algorithm.
The Power-Grasp move involves clenching the
fist. Two colours are tracked (on thumb and little fin-
ger) and the grasp is identified when the distance be-
tween them reduces below a threshold value.
Supination and pronation involve rotating the
wrist, so the palm goes from facing down to facing up,
and back again. Two colours are tracked (on thumb
and little finger), the vector between them is calcu-
lated and compared from one frame to the next.
Wrist flexion and extension involves rotating the
wrist vertically, so the hand moves up and down. Two
colours are tracked (on thumb and little finger), their
relative position vertically is calculated. If they invert
their relative vertical position, while both moving in
the same vertical direction, then flexion/inflexion is
detected.
As the underlying application of the work is in
monitoring rehabilitation of patients with movement
difficulties, the algorithms are designed to detect se-
quences of movement, rather than specific ”posed”
hand shapes. In conventional movement detection al-
gorithms, this would entail identifying change masks
between successive images, and carrying out costly
computation. In this implementation, the gesture
recognition is based on the movement of a set of coor-
dinates in two dimensional screen-space, identified as
the gravity centres of the coloured regions of interest.
This significantly speeds up the gesture recognition
process enabling it to be implemented on the target
lower power tablet devices.
4 RESULTS AND EVALUATION
The algorithms described in this paper have been suc-
cessfully implemented within an Android application
for tablets. The camera resolution of the minimum
specification device was 176x144 pixels, recording
images at around 15 frames per second.
The video in (Ziogas et al., 2012) shows the ap-
plication of this technology within the interactive sto-
rytelling software. The brightly coloured finger mod-
els are constructed from Play-Doh, and can be any
colour. In the video, after using the touch-screen to
progress through the early stages, the Pinch-Grasp
gesture is detected, and used to move a ribbon onto
a bone. Wrist flexion and extension are then recog-
nised in the section which opens the door. The final
section shows the detection of supination and prona-
tion, which is used to turn a tap in the story.
As the algorithms are designed for low perfor-
mance devices, tests were carried out at a series of
decreasing sample rates to assess the robustness of the
solution. Each of the gestures was tested five times by
the subject at the maximum sample rate of 30 frames
per second. During each test the gesture was repeated
ten times, and the number of positive identifications
was logged. The information resulting from colour
AnEfficientApplicationofGestureRecognitionfroma2DCameraforRehabilitationofPatientswithImpairedDexterity
317
segmentation was recorded for every frame of the test
and subsequently subjected to down-sampling to in-
vestigate how many of the ten gestures could be iden-
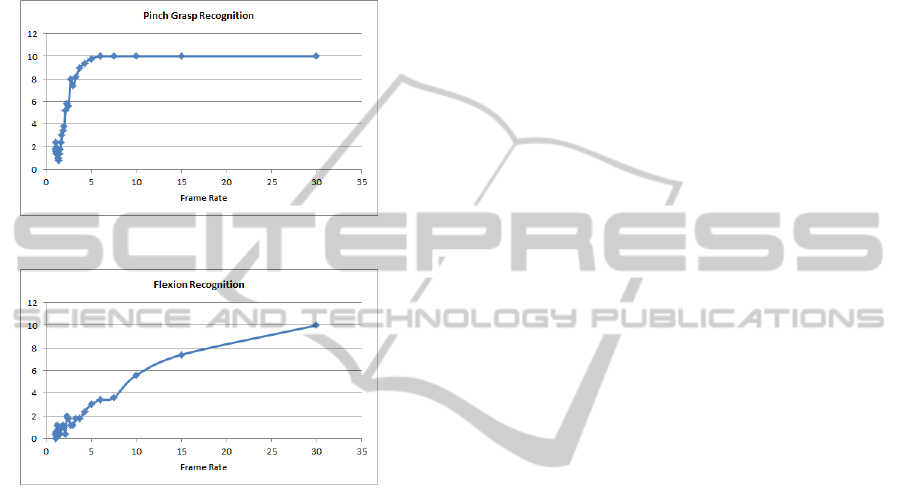
tified as the sampling rate reduces. For each of the
four gestures the number of positive identifications in
each of the test samples were averaged and the results
for two of them are depicted in Figures 1 and 2.
Figure 1: Average pinch grasp recognition.
Figure 2: Average flexion recognition.
The algorithms for detecting three of the four ges-
tures perform very well, down to low sample rates of
around four frames per second (pinch grasp, power
grasp and pronation/suppination). The performance
of the flexion/extension gesture recognition algorithm
tails off much more linearly. These results have an in-
teresting ramification on the application as a whole as
they suggest that the camera and sampling algorithms
can be updated considerably less often than the game
logic and rendering algorithms, which will lead to a
more immersive experience for the child.
5 CONCLUSIONS
Recognition of hand gestures is possible on a low
powered device such as an Android tablet. The two
key steps which have been taken to mitigate the po-
tentially computationally expensive nature of gesture
recognition are to reduce the detection requirements
to brightly coloured finger models, and to require that
the application has advance notice of which specific
gesture to search for.
The use of coloured models allows the early
stage of the image detection software to reduce the
problem to that of tracking points within the two-
dimensional screen-space. The gesture recognition
can be constructed around straightforward algorithms
for analysing the movement of these points, greatly
reducing the computational overhead compared to
analysing change masks within full images. This in-
crease in efficiency comes at the cost of accuracy; the
specific application of this technology requires us to
know a priori which gesture we are searching for.
The test results show that the algorithms are very
robust to lower frame-rates for most of the gestures.
Indeed the results strongly suggest that the limiting
factor for the interactive storybook application on low
power devices is the presentation of the game itself,
as the gesture recognition algorithms continue to per-
form satisfactorily at a much lower sample rate than
the frame-rate required for an immersive experience.
REFERENCES
Bowden, R., Windridge, D., Kadir, T., Zisserman, A., and
Bradyi, M. (2004). A linguistic feature vector for the
visual interpretation of sign language. Proc. 8th Eur.
Conf. Comput. Vis.
Chien, C. W., Brown, T., and McDonaldi, R. (2009). A
framework of children’s hand skills for assessment
and intervention. Child care health and development.,
(35):873–884.
Hong, P., Turk, M., and Huangi, T. (2000). Gesture model-
ing and recognition using finite state machinesl. Proc.
4th IEEE Int. Conf. Autom. Face Gesture recogn.
Lillestrand, R. (1972). Techniques for change detection.
IEEE Trans. Comput, 21(7):654–659.
Mitra, S. and Acharya, T. (2007). Gesture recognition: a
survey. IEEE Transactions on Systems, Man and Cy-
bernetics, 37(3):311–324.
Radke, R. J., Andra, S., Al-Kofah, O., and Roysam, B.
(2005). Image change detection algorithms: a system-
atic survey. IEEE Transactions on Image Processing,
14(3):394–307.
Rosin, P. (2002). Thresholding for change detection. Com-
put. Vis. Image Understanding, 86(2):79–95.
Starner, T. and Pentland, A. (1996). Real-time american
sign language recognition from video using hidden
markov models.
Yamato, J., Ohya, J., and Ishii, K. (1992). Recognizing
human action in time sequential images using hidden
markov model. Proc. IEEE Int. Conf. Comput. Vis.
Pattern recogn., pages 379–385.
Ziogas, E., Ushaw, G., Eyre, J., and Morgan, G.
(2012). http://homepages.cs.ncl.ac.uk/2010-
11/games/tyney/videos/.
Zitova, B. and Flusser, J. (2003). Image registration meth-
ods: a survey. Image Vis. Comput, 21:9771000.
HEALTHINF2013-InternationalConferenceonHealthInformatics
318
