
TEBRA: An Automatic Prompting System for Persons with Cognitive
Disabilities in Brushing Teeth
Christian Peters, Thomas Hermann and Sven Wachsmuth
CITEC, Bielefeld University, Bielefeld, Germany
Keywords:
Cognitive Assistive Technology, Task Analysis, Bayesian Network, Dynamic Timing Model, User Study.
Abstract:
We introduce a novel Cognitive Assistive Technology. The TEBRA system assists persons with cognitive
disabilities in brushing teeth by prompting the user. We develop the system based on an analysis of the task
using qualitative data analysis. We recognize different subtasks applying a hierarchical recognition framework
based on a Bayesian Network. The user’s progress in the task is monitored using a Finite State Machine and
dynamic timing model which allows for different velocities of task execution. We evaluate the TEBRA system
in a first study with regular users. We found that the system is able to provide appropriate prompts in terms of
timing and modality to assist a user through the complex task of brushing teeth.
1 INTRODUCTION
Cognitive assistive technology aims at developing
systems which support persons with cognitive dis-
abilities in the execution of activities of daily liv-
ing (ADLs). Such persons mostly have problems in
accomplishing ADLs on their own and need assis-
tance to perform such tasks successfully. Automatic
prompting systems can provide assistance and keep
elderly people or persons with cognitive disabilities
further in their own homes which leads to an increase
of independence of the persons and a relief of care-
giver burden.
The execution of ADLs is very complex: ADLs
like washing hands, brushing teeth, or preparing meal
contain several subtasks which can be combined in a
flexible manner. Furthermore, the execution of sub-
tasks differs significantly between persons based on
their individual abilities. A key paradigm in the devel-
opment of automatic prompting systems for complex
ADLs is to deliver prompts to the user when neces-
sary in order to foster the independence of the user. A
prompt is necessary if the user forgets a step or gets
stuck in task execution. Users with cognitive disabil-
ities, but also regular users, show a huge variance in
spatial and temporal execution of the task: one user
may take the brush with the left hand while another
user takes the right hand and performs completely dif-
ferent movements at different velocities. A cognitive
assistive technology needs to deal with the spatial and
temporal variance to deliver appropriate prompts in
terms of timing and modality.
In this paper, we introduce a novel cognitive as-
sistive technology: the TEBRA (TEeth BRushing
Assistance) system which assists in brushing teeth as
an important ADL. We develop the TEBRA system
based on a systematic analysis of the task. We use
Interaction Unit (IU) analysis proposed in (Ryu and
Monk, 2009) as a method for qualitative data analy-
sis. The results of IU analysis are utilized for different
design decisions. Results are (1) the decomposition of
the task into subtasks we aim to recognize, (2) the ex-
traction of environmental conditions associated with
subtasks and task progress, (3) preconditions and ef-
fect of subtasks.
In order to deal with the variance in spatial exe-
cution, we abstract from the recognition of specific
movements by tracking objects or the user’s hands.
Instead, we classify subtasks based on environmen-
tal configurations in a hierarchical recognition frame-
work. We cope with the temporal variance in task
execution by using a Finite State Machine and a dy-
namic timing model allowing for different user veloc-
ities. We learn the timing parameters for different ve-
locities of users (fast, medium and slow) and switch
the parameters dynamically during a trial based on
the velocity of the user. We choose appropriate sys-
tem prompts using a search in an ordering constraint
graph (OCG). An OCG models temporal relations be-
tween subtasks in terms of preconditions and effects
obtained in the IU analysis.
We evaluate the first prototype of the TEBRA sys-
12
Peters C., Hermann T. and Wachsmuth S..
TEBRA: An Automatic Prompting System for Persons with Cognitive Disabilities in Brushing Teeth.
DOI: 10.5220/0004193800120023
In Proceedings of the International Conference on Health Informatics (HEALTHINF-2013), pages 12-23
ISBN: 978-989-8565-37-2
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

tem in a study with regular users. Evaluating our sys-
tem with regular users is feasible in a first study since
regular persons show individual ways of task execu-
tion which may not coincide with the system’s frame-
work of action. The system prompts the user who
in turn has to react to the prompts and adapt his/her
behavior to successfully execute the task from a sys-
tem’s point of view. Hence, we provoke similar phe-
nomena in terms of prompting and reaction behavior
with both regular users and persons with cognitive
disabilities. We consider the target group in the de-
velopment of the TEBRA system because IU analy-
sis is conducted on videos of persons with cognitive
disabilities in a residential home setting. We are cur-
rently organizing a study with the target group. The
aim of the study with regular users is two-fold: firstly,
we evaluate the technical correctness of the system
with regard to recognition of subtasks, monitoring
the user’s progress and timing of prompts. Secondly,
we determine whether the prompts are appropriate in
terms of duration and modality.
The remainder of the paper is structured as fol-
lows: section 2 gives an overview of relevant re-
lated work. In section 3, we give an overview of the
TEBRA system. Section 4 describes IU analysis and
the integration of the results in the system design. The
main components of the TEBRA system are described
in detail in section 5. Section 6 shows the results of
the user study, followed by a conclusion in section 7.
2 RELATED WORK
Cognitive assistive technology (CAT) is developed for
special user groups like elderly or persons with cog-
nitive disabilities in a number of different ADLs: the
COACH system (Hoey et al., 2010) assists persons
with dementia in the handwashing task, ARCHIPEL
(Bauchet et al., 2008) supports persons with cognitive
disabilities in meal preparation. ADLs are complex
tasks in terms of spatial execution which makes the
recognition of behaviors challenging. Much work is
done on recognizing behaviors based on movement
trajectories of objects or the user’s hands (Moore
et al., 1999), (Nguyen et al., 2005), (Pusiol et al.,
2008). However, user behaviors with similar appear-
ance are hard to distinguish based on movement tra-
jectories only. In this work, we classify behaviors
based on environmental states of objects involved in
the brushing task.
Users perform behaviors at different velocities due
to individual abilities. In the TEBRA system, we ex-
plicitly model timing parameters of user behaviors.
We use a Finite State Machine and a dynamic timing
model to allow for different velocities of the user’s
movements. In the Autominder system (Pollack et al.,
2003), persons with memory impairments are assisted
in scheduling daily activities. Autominder models du-
rations of events and reasons on temporal constraints
to provide appropriate reminders. The PEAT system
(Najjar et al., 2009) schedules user’s activities by ap-
plying reactive planning to restructure the schedule
when events take more time than expected.
Monitoring the user’s progress in the task is a
key aspect to provide appropriate prompting. The
COACH system uses a Partially Observable Markov
Decision Process (POMDP). A belief state models the
user’s abilities and monitors the progress in the task.
Whenever the belief state changes significantly due to
sensor observations, the new belief state is tested over
a fixed period of time whether it persists.
The Activity Compass assists disoriented users
finding a destination by using a hierarchical Markov
model to track the location of the user (Patterson
et al., 2004). The specification process of probabilis-
tic models like POMDPs is very hard in terms of de-
termining the probabilities of dependent variables in
the model. In the TEBRA system, we monitor the
user’s progress by utilizing a set of environmental
variables which we deterministically update based on
the occurrence of user behaviors. We find appropriate
prompts using a search procedure on an ordering con-
straint graph (OCG). An OCG models temporal rela-
tions between subtasks in terms of a partial ordering
of subtasks. We don’t model every possible way of
executing the task as done in the ARCHIPEL system
(Giroux et al., 2008) which uses a full hierarchical
representation of the task. Instead, we use the OCG
to model the constraints under which the execution of
user behaviors is appropriate.
Most CAT systems are modelled using common-
sense knowledge without further analyzing the task.
Here, we apply a structured approach of retrieving rel-
evant information on which we develop the TEBRA
system. We use Interaction Unit (IU) analysis pro-
posed in (Ryu and Monk, 2009) as a method for qual-
itative data analysis to obtain relevant information
about the brushing task. IU analysis was used in a
similar context in (Hoey et al., 2011) in order to facil-
itate the specification process of an automatic prompt-
ing system using a POMDP.
3 TEBRA OVERVIEW
Figure 1 depicts an overview of the TEBRA system.
We built a washstand setup which we equipped with
sensor technology. The sensor data is passed to a hi-
TEBRA:AnAutomaticPromptingSystemforPersonswithCognitiveDisabilitiesinBrushingTeeth
13

Figure 1: Overview of the TEBRA system.
erarchical recognition framework which computes the
current most probable user behavior. The main prob-
lem in the recognition component is the huge spatial
variance in task execution. We tackle the problem by
abstracting from tracking the user’s hands or objects.
Instead, we infer the user’s behavior based on an envi-
ronmental configuration which is expressed by states
of objects manipulated during a behavior: we prepro-
cess the sensor data into discrete features represent-
ing object states which are fed into a Bayesian Net-
work classification scheme. A Bayesian filtering step
outputs a belief (conditional probability distribution)
over the user behaviors.
The most probable user behavior is calculated
each time new sensor data is obtained. A temporal in-
tegration mechanism accumulates the user behaviors
over time and provides the duration of the behavior in
seconds.
A key aspect is the huge variance in temporal ex-
ecution of the task. One user, for example, is able
to perform a subtask very quickly while another user
takes much longer. We use a Finite State Machine
(FSM) to model timing of behaviors. The states of the
FSM model different phases during a user behavior:
we validate a user behavior and perform a consistency
check on the validated behavior with respect to the
user’s progress in task execution. If the validated be-
havior is consistent, the system won’t prompt, but will
instead start a new iteration cycle receiving sensor
data. If the validated behavior is inconsistent, the sys-
tem will search for a consistent behavior to prompt:
we use an online search procedure in an ordering con-
straint graph. An ordering constraint graph models
partial orderings between user behaviors in the brush-
ing task and is computed offline using a partial order
planner. The consistent behavior found is displayed
to the user by an audio-visual prompt delivered via a
TFT display at the setup.
Most CAT systems are designed using common-
sense knowledge. In the design of the TEBRA sys-
tem, we focus on an iterative design process using a
method of qualitative data analysis which is described
in the following section.
4 DESIGN PROCESS
Developing a CAT system for an everyday task like
brushing teeth is a challenging problem. The task
consists of several subtasks which can be combined
in a flexible way during task execution. The analy-
sis of the task and subtasks as well as the possible
ways of task execution are important steps in the de-
velopment of an assistance system. We apply Interac-
tion Unit (IU) analysis proposed in (Ryu and Monk,
2009). IU analysis models interaction by describing
the conjunction of cognitive and environmental pre-
and postconditions for individual actions. We apply
IU analysis on 23 videos recorded at our cooperation
partner Haus Bersaba, a residential home where per-
sons with cognitive disabilities such as Alzheimer’s
Disease, Autistic Spectrum Disorder, Learning Dis-
abilities, etc. permanently live. Each video shows a
single trial of a user brushing teeth while being ob-
served and supported by a caregiver.
We are interested in three aspects of IU analy-
sis: (1) decomposition of the task into subtasks which
we will call user behaviors in the following, (2) en-
vironmental conditions associated with user behav-
iors and task progress, (3) preconditions and effects
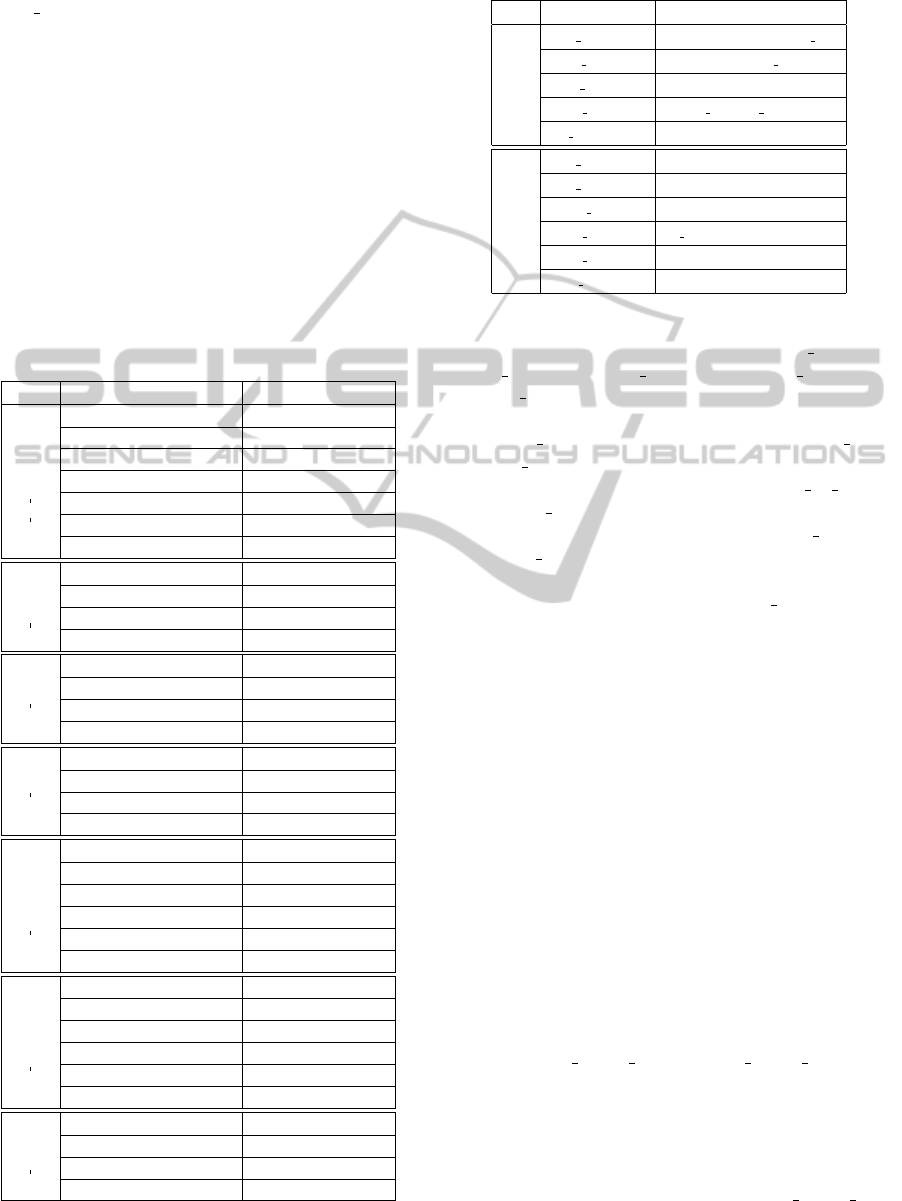
of behaviors. Table 1 shows the results of the IU
analysis for brushing teeth. The brushing task is de-
composed into seven user behaviors as described in
column UB: paste on brush, fill mug, rinse mouth,
brush teeth, clean mug, clean brush and use towel.
Each user behavior is further subdivided into single
steps described in column UB steps. rinse mouth for
example consists of three steps: mug is moved to the
face, the user rinses the mouth and moves the mug
away from the face. Column Current Environment
shows the environmental configuration as a precon-
dition of single user behavior steps. Performing the
step changes the environmental state, for example in
the first step of paste on brush: the toothpaste tube is
on the counter and taking the tube changes the tooth-
paste location to ’in hand’.
We utilize the environmental configuration ob-
tained in IU analysis. We extract environmental states
in terms of discrete variables as depicted in Table
2. We distinguish between behavior and progress
variables: we apply behavior variables to recognize
user behaviors in a hierarchical recognition frame-
work. The progress variables are hard to observe
HEALTHINF2013-InternationalConferenceonHealthInformatics
14
directly due to reasons of robustness: for example,
it is very error-prone to visually detect whether the
brush condition is dirty or clean. A specialized sensor
at the brushing head is not desirable due to hygienic
reasons. We utilize progress variables to monitor the
user’s progress during the task.
We abstract from the recognition of single behav-
ior steps as given in column UB steps in Table 1.
Instead, we infer the user’s behavior based on the
behavioral variables which express states of objects
manipulated during a behavior. From column Cur-
Table 1: Results of the IU analysis for brushing teeth. Col-
umn “UB” describes the different subtasks involved in the
brushing task. Column “UB steps” lists the ideal steps to
execute the according subtask. Column “Current Environ-
ment” shows the environmental configuration in terms of
states of objects involved in a particular step. TT = tooth-
paste tube.
UB Current Environment UB steps
TT on counter take TT from counter
TT closed in hand alter TT to open
brush on counter take brush from counter
brush and TT in hand spread paste on brush
TT is open alter TT to closed
TT closed in hand give TT to counter
paste on brush
TT on counter, brush in hand
mug empty give mug to tap
mug at tap, tap off alter tap to on
mug at tap, tap on alter tap to off
fill mug
mug filled
mug filled give mug to face
mug at face rinse
mug else give mug to counter
rinse mouth
mug counter
brush with paste in hand give brush to face
brush at face brush all teeth
brush at face, teeth clean take brush from face
brush teeth
brush not at face
mug dirty at counter give mug to tap
mug dirty at tap, tap off alter tap to on
mug dirty at tap, tap on clean mug
mug clean at tap, tap on alter tap to off
mug clean at tap, tap off give mug to counter
clean mug
mug clean at counter
brush dirty give brush to tap
brush dirty at tap, tap off alter tap to on
brush dirty at tap, tap on clean brush
brush clean at tap, tap on alter tap to off
brush clean at tap, tap off give brush to counter
clean brush
brush clean at counter
towel at hook, mouth wet give towel to face
towel at face, mouth wet dry mouth
towel at face, mouth dry give towel to hook
use towel
towel at hook
Table 2: Behavior and progress variables extracted from the
environmental configuration in Table 1.
Type State Variable Values
mug position counter, tap, face, else, no hyp
towel position hook, face, else, no hyp
paste movement no, yes
brush movement no, yes sink, yes face
behavior
tap condition off, on
mug content empty, water
mug condition dirty, clean
mouth condition dry, wet, foam
brush content no paste, paste
brush condition dirty, clean
progress
teeth condition dirty, clean
rent Environment, we extract five behavior variables
describing important object states: mug position,
towel position, paste movement, brush movement
and tap condition. The upper part of Table 2 shows
the five variables and their according discrete values.
For brush movement, we have the states no, yes sink
and yes face. The latter ones are important to dis-
criminate between the user behaviors paste on brush
and brush teeth based on the movement of the
brush. The values of the variables mug position
and towel position are the different regions identified
in column Current Environment where the mug and
towel appear during task execution. No hyp is used if
no hypothesis about the mug/towel position is avail-
able.
We utilize progress variables to monitor the user’s
progress in the task. At each time in task execu-
tion, the user’s progress is modelled by the set of
six progress variables which we will denote progress
state space in the following. The lower part of Table
2 shows the variables of the progress state space and
their according discrete values.
The occurrence of a user behavior during the exe-
cution of the task leads to an update of the progress
state space: we define necessary preconditions and
effects of user behaviors in terms of progress vari-
ables. When a user behavior occurs, we check
whether the preconditions are met and, if so, update
the progress state space with the effects of the cur-
rent behavior. Table 3 shows the preconditions and
effects for user behaviors in terms of progress vari-
ables extracted during IU analysis. We distinguish
between rinse mouth wet and rinse mouth clean be-
cause the steps have different meanings during task
execution: the IU analysis is based on videos recorded
at Haus Bersaba. The videos showed that wetting the
mouth with water using the mug (before brushing the
teeth) is a common step as part of the regular daily
routine. This step is described as rinse mouth wet
TEBRA:AnAutomaticPromptingSystemforPersonswithCognitiveDisabilitiesinBrushingTeeth
15

Table 3: Preconditions and effects of user behaviors ex-
tracted from the environmental configuration in Table 1.
User Behavior Preconditions Effects
paste on brush brush content=no paste brush content=paste
teeth condition=dirty brush condition=dirty
fill mug mug content=empty mug content=water
clean mug mug content=empty mug condition=clean
mug condition=dirty
teeth condition=clean
rinse mouth clean mug content=water mug condition=dirty
mouth condition=foam mouth condition=wet
teeth condition=clean mug content=empty
rinse mouth wet mug content=water mug condition=dirty
mouth condition=dry mouth condition=wet
brush teeth brush content=paste teeth condition=clean
teeth condition=dirty brush content=no paste
mouth condition=wet mouth condition=foam
brush condition=dirty
clean brush brush condition=dirty brush condition=clean
teeth condition=clean brush content=no paste
use towel mouth condition=wet mouth condition=dry
teeth condition=clean
whereas cleaning the mouth after the brushing task
is rinse mouth clean.
The results of the IU analysis described in this sec-
tion are integrated into the TEBRA system: the de-
composition of the task into user behaviors and the
behavioral variables are utilized in the hierarchical
recognition framework. The progress state space and
the preconditions and effects of user behaviors are in-
tegrated into the planning and decision making frame-
work. Both components are described in more detail
in the following section.
5 SYSTEM COMPONENTS
We built a washstand setup as depicted on the left in
Figure 1 which we equipped with a set of sensors for
environmental perception. We use a combination of
unobtrusive sensors installed in the environment and
tools. We don’t attach any wearable sensors to the
user directly, because we don’t want to disturb in task
execution. The washstand setup is equipped with two
2D cameras observing the scene from an overhead
and a frontal perspective. A flow sensor installed at
the water pipe measures whether the water flow is on
or off. The toothbrush is equipped with a 9-DOF
1
sen-
sor module including accelerometer, gyroscope and
magnetometer in 3 axis each. We extract a set of fea-
tures from the sensors which we feed into the hierar-
1
Degree of freedom.
chical recognition framework described in the follow-
ing subsection.
5.1 Hierarchical Recognition
Framework
The IU analysis decomposes a task into different user
behaviors. Each user behavior is further subdivided
into single steps which are described in terms of en-
vironmental states. Hence, the IU analysis structures
the task into a hierarchy of user behaviors and com-
bines semantic information about the user behavior
with environmental states. In our approach, we make
use of the hierarchical structure obtained in the IU
analysis: we use a two-layered framework for user be-
havior recognition modeling the hierarchical structure
as shown in Figure 2. A detailed description of the
...
Bayesian Network
MPE
Bayesian
Filtering
Figure 2: Overview of the hierarchical recognition frame-
work. See text for a detailed description.
recognition framework can be found in (Peters et al.,
2012). We extract ten features ( f
1
... f
10
) from the sen-
sory information: from the camera images, we extract
the position of the mug, towel and paste using a de-
tector based on color distribution which provides the
center positions of the object’s bounding boxes. The
flow sensor returns a binary feature indicating water
flow. For brush movement detection, it is sufficient to
extract only the 3-dimensional gyroscope data which
is the change in orientation in x, y and z direction.
The features f
1
... f
10
are discretized into an interme-
diate representation of state space variables O
1
...O
5
given in the upper part of Table 2. O
1
...O
5
are ob-
tained from the IU analysis and encode the environ-
mental configuration of user behaviors in terms of be-
havior variables. O
1
...O
5
which we will call observa-
tion variables in the following, correspond to the vari-
ables mug position, towel position, paste movement,
brush movement and tap condition. The position of
the mug and towel as well as the movement of the
toothpaste are calculated by comparing the bounding
box hypotheses of the object detectors to pre-defined
image regions like counter or tap. The movement of
the brush is computed using the gyroscope data ob-
tained by the sensor module in the toothbrush. The
condition of the tap is set according to the flow sensor.
In our framework, we aim to recognize the user be-
HEALTHINF2013-InternationalConferenceonHealthInformatics
16

haviors obtained from the IU analysis in Table 1. We
subsume the user behaviors fill mug and clean mug to
a common user behavior rinse mug because the rel-
evant observation variables as well as the according
states are nearly identical for both user behaviors. In
a regular trial, user behaviors don’t follow exactly on
each other, but mostly alternate with transition behav-
iors, for example the user’s hand approaches or leaves
a manipulated object. We consider these transition
behaviors by adding a user behavior nothing which
we treat as any other user behavior in our recognition
model. In this work, we use a Bayesian Network (BN)
to classify user behaviors based on the observations
O
1
...O
5
. A BN is ideally suited to model the struc-
tural relations between user behaviors denoted by the
random variable S and relevant observation variables
O
1
...O
5
. We use a BN with a NaiveBayes structure as
depicted in Figure 2. Each observation variable O
i
is
conditionally independent given the user behavior:
P(O
1
, ...,O
5
, S) = P(S) ·
5
∏
i=1
P(O
i
|S) (1)
The BN with NaiveBayes structure has the ability to
deal with small training sets since the probability of
each O
i
depends only on the user behavior S. This is
important in our work, because some user behaviors
like clean brush are rare compared to other behav-
iors and the acquisition of data in our scenario is very
hard. The result of the BN classification scheme is a
belief b(s), a probability distribution over user behav-
iors. The BN is prone to faulty observations which
happen occasionally in the discretization of features
into observation variables. Faulty observations lead
to rapid changes in the belief b from one time step to
the next. This is not desirable in our scenario, because
transitions between user behaviors are rather smooth
due to the nature of the task. Hence, we extend our
framework with a transition model which takes into
account the belief of the preceding time step. This
results in a Bayesian filtering approach similar to the
forward algorithm in a Hidden Markov Model. The
belief b is updated to a consecutive belief b
0
using
b
0
(s
0
) =
O(s
0
, o) ·
∑
s∈S
T (s
0
, s) ·b(s)
C
(2)
with the normalization term C =
∑
s
0
∈S
O(s
0
, o) ·
∑
s∈S
T (s
0
, s) · b(s). O(s
0
, o) =
∏
5
i=1
P(O
i
|s
0
) is the
probability of making observation o when the user be-
havior is s
0
. The observation model O(s
0
, o) and tran-
sition model T (s
0
, s) are learned on manually anno-
tated training data using Maximum Likelihood (ML)
estimation. The transition model in equation 2 leads
to smooth state transitions between user behaviors be-
cause single faulty observations can’t rapidly change
the entire belief from one time step to the next. The
most probable explanation from b
0
- the user behavior
s
0
with the highest probability - is fed into the tempo-
ral integration mechanism.
5.2 Planning and Decision Making
The planning and decision making framework deter-
mines whether to prompt the user during task execu-
tion and chooses a prompt as appropriate. The main
paradigm in our system is that a prompt should only
be given to the user when necessary in order to foster
the independence of the user. A prompt is necessary
when the user gets stuck in task execution or performs
a step which is not appropriate at that time. In or-
der to check whether a user behavior is appropriate,
we maintain the user’s progress in the task utilizing
the progress state space described in section 4. We
update the progress state space based on the occur-
rence of user behaviors: when a behavior is recog-
nized by the system, the progress state space is deter-
ministically updated with the effects of the user be-
havior. For example, if paste on brush is recognized,
the variables brush content and brush condition of
the progress state space are set to paste and dirty, re-
spectively, according to the effects in Table 3. All
other variables remain unchanged. Monitoring the
user’s progress in the task is a very challenging prob-
lem due to the huge temporal variance in behavior
execution. For example, one user may successfully
perform paste on brush much slower compared to an-
other user. Furthermore, the execution time of a sin-
gle person may vary from day to day, especially for
persons with cognitive disabilities. We cope with the
huge intra- and inter-personal variance in a general-
ized timing model as described in the following sub-
section.
5.2.1 Timing Model
The hierarchical recognition framework works in a
frame-wise manner: the sensors in our setup are syn-
chronized to a rate of 15 Hz. For each set of sensor
data, the hierarchical recognition framework calcu-
lates the most probable user behavior ub. The plan-
ning framework works on a real-time scale: durations
of user behaviors are measured in seconds. Hence,
we apply a temporal integration mechanism between
recognition and planning framework: we maintain a
local history, a list of user behaviors to which the
most probable behavior ub calculated in the recog-
nition framework is added. For each ub, we calcu-
late the occurrence o of ub in the history. As long
as o ≥ 0.8, the duration of the current behavior is
TEBRA:AnAutomaticPromptingSystemforPersonswithCognitiveDisabilitiesinBrushingTeeth
17

measured in seconds. If o < 0.8, we reset the cur-
rent behavior time to 0. With a threshold of 0.8, we
allow for misperceptions in the hierarchical recogni-
tion framework without resetting the current behav-
ior duration in case of single sensor errors. The tem-
poral integration mechanism provides the duration of
the current user behavior in seconds which is fed into
a Finite State Machine (FSM). The FSM depicted in
Figure 3: Finite State Machine used to model the different
phases in user behavior timing.
Figure 3 models the timing behavior in our planning
framework. A FSM is suitable to model the different
phases during a behavior: we validate a user behavior
over a certain period of time (validation state) before
we check the consistency (check consistency state).
We refer to this time as validation time t
ub
v
based on
the average duration of the behavior. We compare
the duration t
ub
of the current behavior ub to t
ub
v
. If
t
ub
≥t
ub
v
, the FSM transits to state consistency check.
The consistency of ub is checked by comparing the
preconditions of ub with the progress state space. If
the preconditions are not fulfilled, ub is inconsistent
which means that ub is not an appropriate behavior at
that time. Hence, a prompt is delivered to the user.
We describe the selection process of a prompt in de-
tail in section 5.2.2. If the preconditions are fulfilled,
ub is consistent. If the consistency check occurs too
early, the user might feel patronized by the system. If
the check is too late, the behavior effects might have
been erroneously occurred already although the be-
havior is inconsistent. If ub is consistent, the FSM
transits to state pre effect. The effects of a user be-
havior occur after a minimum duration of the behavior
which we call effect time t
ub
e
. State pre
effect denotes
that the duration of ub is too short for the effects to
occur because t
ub
e
is not reached. If t
ub
e
≥ t
ub
, we up-
date the progress state space by applying the effects
of ub. The FSM transits to state post effect. For any
user behavior (except for nothing), a timeout t
ub
t
may
occur in the post effect state. A timeout t
ub
t
denotes
that the user might be stuck in task execution. If the
duration t
ub
≥ t
ub
t
, a timeout prompt will be selected
and delivered to the user. After a prompt, the FSM
transits to a state wait for a fixed time t
w
= 5s in or-
der to wait for the user to receive the prompt and react
properly.
We maintain a different set of timing parameters
t
ub
v
t
ub
e
and t
ub
t
for each user behavior in order to
cope with the huge variance in temporal execution
of individual behaviors. For example, the duration
of rinse mouth is usually much shorter compared to
brush teeth. Hence, the effect time t
ub
e
and timeout
t
ub
t
of the behaviors are completely different. The
validation time t
ub
v
can be set higher for longer be-
haviors to avoid a misdetection of the behavior due
to perception errors. In addition to the different du-
rations of user behaviors, we cope with different ve-
locities of users by maintaining a set of timing pa-
rameters for three different user velocities: t
ub
v
i
t
ub
e
i
and
t
ub
t
i
where i = {f , m,s} corresponding to fast, medium
and slow execution velocity chosen manually by the
authors. The parameters are estimated using an unsu-
pervised learning mechanism: we apply a k-means al-
gorithm to user behavior durations which we recorded
in 18 test trials. We cluster the durations of each
user behavior into k = 3 classes corresponding to fast,
medium and slow execution velocity. We fit a Gaus-
sian distribution N
ub
i
(µ, σ
2
) over the members of each
cluster. We calculate the timing parameters t
ub
v
i
t
ub
e
i
and
t
ub
t
i
using the inverse cumulative distribution function
(invCDF) of N
ub
i
(µ, σ
2
). For a given probability p,
invCDF returns the duration at which the cumulative
distribution function (CDF) is p. Exemplarily, we de-
pict the CDF of rinse mouth wet for velocity fast in
Figure 4: We calculate the validation time t
ub
v
i
based
on the average length of ub in velocity model i:
t
ub
v
i
= 0.3 ·µ
ub
i
(3)
where µ
ub
i
is the mean duration of the user behavior
ub and velocity model i. t
ub
v
i
denotes that we validate
behavior ub in velocity model i for a duration of 0.3
times the mean duration of ub in i. The effect time
and timeout are set with respect to invCDF:
t
ub
e
i
= invCDF(0.3) (4)
t
ub
t
i
= 2.5 ·invCDF(0.9) (5)
with invCDF(x) = µ
ub
i
+ σ
ub
i
·(−1) ·
√
2 ·erfcInv(2x)
and erfcInv is the inverse complementary error func-
tion. t
ub
e
i
denotes that the effects of behavior ub in ve-
locity model i occur after a duration of invCDF(0.3).
HEALTHINF2013-InternationalConferenceonHealthInformatics
18

validation
pre-effect
post-effect
probability p
duration in ms
CC - consistency
check
effects occur
X
X
X
CC
X
CDF
Figure 4: Cumulative distribution function of
rinse mouth wet for velocity fast showing the differ-
ent timing parameters and according phases of the
FSM.
We chose a small parameter p
v,e
= 0.3 in the calcu-
lation of the effect time of a behavior due to the fol-
lowing reason: missing a successful behavior and an
update of the progress state space due to a large effect
time is not desirable because it leads to an incorrect
progress state space. Setting the effects of a behavior
earlier than necessary is not critical since we already
validated the user behavior. The description of t
ub
t
i
is
analogue to t
ub
e
i
. We have a total of N = 72 timing pa-
rameters: for each of the eight user behaviors given in
Table 3, we have three velocities with three timing pa-
rameters each. We calculate the parameters based on
two meta-parameters manually set to p
v,e
= 0.3 and
p
t
= 0.9 used in equations 3, 4 and 5.
In order to cope with the intra-personal variance
in temporal execution of user behaviors, we use the
learned parameters in a dynamic timing model: when
a user behavior ub switches to a successor behavior
ub
0
, we determine the duration of ub. We catego-
rize the duration into one of the velocity classes fast,
medium and slow. We maintain a discrete probabil-
ity distribution over the velocity classes. We deter-
mine the current user velocity by applying a winner-
takes-all method on the probability distribution which
chooses the velocity occurring most frequently during
the trial so far. The timing parameters of the FSM are
set according to the user’s velocity.
The FSM models the timing behavior of the
TEBRA system. The selection mechanism of an ap-
propriate prompt is described in the following subsec-
tion.
5.2.2 Prompt Selection
The prompt selection mechanism determines the
content and modality of prompts given to the user.
The content of a prompt is a hint on a user behavior
and denotes an appropriate next step in task execu-
tion. The modality describes the sensory channel
on which the prompt is delivered to the user. In
the TEBRA system, we apply two types of visual
prompts accompanying a verbal command: (1)
pictograms and (2) real-time videos. The real-time
videos are prerecorded showing a human actor
performing the desired behavior. In a preliminary
study using a Wizard-of-Oz paradigm with persons
with cognitive disabilities (Peters et al., 2011), some
users didn’t react to audio prompts and were not able
to proceed in task execution. Hence, we implemented
an escalation hierarchy to provide prompts with
different levels of information to the user: the type
of prompt preferred by the system is a pictogram
prompt. If the user doesn’t react to the prompt, we
escalate in the prompting hierarchy and deliver a
video prompt where the behavior is depicted in more
detail. We conducted interviews with the caregivers
at Haus Bersaba about the prompting modalities.
The caregivers named pictogram and video prompts
paired with a verbal command as the preferred
modalities. Amongst the choices were pure audio
prompts, visual prompts showing objects to use next
and cartoon-like prompts. We have a total of 15
prompts: for each user behavior, we have a pictogram
and a video prompt plus an additional pictogram
showing that the user has reached the final state of
the task.
The prompt selection mechanism is triggered
in two cases: firstly, when a timeout of a user
behavior occurs. Secondly, when the current user
behavior is inconsistent with the progress state space.
Inconsistent means that there are open preconditions
of the current user behavior which are not fulfilled
in the progress state space. In both situations,
an appropriate prompt to the user addresses the
following requirements: the prompt needs to (1) be
consistent with the current progress state space, (2)
push forward the user’s progress in the task, and
(3) provide at least one open precondition of the
current behavior as an effect. The latter requirement
arises because we want to assist the user in his way
of executing the task as far as possible. Hence,
we aim to find a prompt which supplies the open
precondition and allows the user to re-perform the
desired behavior after correctly performing the
prompted behavior. For example, assume the user
has successfully performed brush teeth and performs
use towel afterwards. use towel is inconsistent
because precondition mouth cond=wet is not fulfilled
(mouth cond=foam). In this situation, two prompts
are appropriate: clean brush and rinse mouth clean.
TEBRA:AnAutomaticPromptingSystemforPersonswithCognitiveDisabilitiesinBrushingTeeth
19

The prompt selection mechanism would then decide
for rinse mouth clean because it provides the open
precondition mouth cond=wet as an effect. If the
user performs rinse mouth clean, he/she can go on
performing use towel as desired which would not be
the case with clean brush.
Our prompt selection mechanism performs a
search on an ordering constraint graph (OCG) to find
an appropriate prompt. An OCG is a visualization
of a set of ordering constraints which are calculated
using a partial order planner: given an initial state I, a
goal state G and a set of STRIPS-like actions A with
preconditions and effects, the partial order planner
calculates a plan to transit from the initial to the goal
state. A plan consists of a set of actions A, a set of
ordering constraints O (action a before b), a set of
causal links C (action a provides condition x for b)
and a set of variable bindings B (variable v = c where
c is a constant).
In this work, we use a partial order planner to
obtain an OCG for the task of brushing teeth. The
user behaviors and according preconditions and
effects identified in the IU analysis as given in Table
3 form the set of possible actions A. The initial and
goal states are extracted from the IU analysis in Table
1 in terms of progress variables: G = [mug content =
empty, mug condition = clean, mouth condition =
dry,brush content = no paste, brush condition =
clean, teeth condition = clean] The initial state
differs only in the variable teeth condition = dirty.
From the ordering constraints O and the causal links
C, we manually construct a directed OCG as depicted
in Figure 5. An arrow in the OCG describes that the
Figure 5: Ordering constraint graph depicting partial order-
ings of user behaviors in the brushing task. We depict the
preconditions and effects of paste on brush, exemplarily.
source behavior provides necessary preconditions
for the target behavior. For example, rinse mug fill
provides the effect mug content = water which is a
Algorithm 1: Select appropriate prompt.
1: function SELECTPROMPT(ub)
2: op ← GETOPENPRECONDITIONS(ub)
3: for all op do
4: prompt ← PROCESSPRECONDITION(ub,op[i])
5: add prompt to valid prompts
6: end for
7: if |valid| ≥ 2 then
8: prompt ← GETCLOSESTTOGOAL(valid)
9: return prompt
10: else
11: return valid[0]
12: end if
13: end function
Algorithm 2: Process precondition.
function PROCESSPRECONDITION(ub,op)
2: supplyUB ← FINDSUPPLYUB(ub, op)
if supplyUB is empty then
4: prompt ←FINDCONSISTENTPREDECESSOR()
goal
6: return prompt
else
8: CHECKCONSISTENCY(supplyUB)
if supplyUB is consistent then
10: return supplyUB
else
12: return SELECTPROMPT(supplyUB)
end if
14: end if
end function
precondition of rinse mouth wet. The OCG depicts
no strict execution plan of the task which the user
has to follow, but models the ordering between
behaviors in the overall task: the behavior sequence
rinse mug f ill, paste on brush, rinse mug f ill e.g.
is consistent with respect to the partial ordering given
in Figure 5.
We search for an appropriate prompt in the OCG
as described in algorithm 1: We determine the
open preconditions of the inconsistent user behavior
ub. We process each open precondition as described
in algorithm 2: we search for a user behavior ub
0
which is a predecessor of ub in OCG and provides
the open precondition. If ub
0
exists, we check the
consistency with regard to the progress state space.
If ub
0
is consistent, ub
0
is an appropriate prompt. If
ub
0
is also inconsistent due to open preconditions, we
recursively call selectPrompt with supplyUB in order
to find a behavior resolving the open preconditions
of supplyU B. By recursively calling selectPrompt,
we resolve chains of open preconditions over several
user behaviors by iterating backwards through the
OCG. If no predecessor of ub is found providing
the open precondition, we search for a consistent
HEALTHINF2013-InternationalConferenceonHealthInformatics
20

behavior by iterating backwards through the OCG
starting at the goal node. By starting at the goal node,
we ensure to find a consistent behavior which is most
closely to the desired goal state. In case of a timeout,
the prompt selection mechanism directly searches for
a consistent user behavior starting at the goal node.
We evaluate the technical correctness of the
planning framework as well as the hierarchical
recognition framework in a user study described in
the following section.
6 USER STUDY AND RESULTS
We evaluate the first prototype of the TEBRA sys-
tem in a study with a total of 26 trials. Each trial is
a single brushing task performed by a regular user.
A study with regular users is feasible since regular
persons show individual ways in the execution of the
task which may not coincide with the system’s frame-
work of action. The system prompts the user who has
to adapt to the prompts to successfully execute the
task from a system’s point of view. Hence, we pro-
voke similar phenomena in terms of prompting and
reaction behavior in a study with regular users com-
pared to a study with persons with cognitive disabili-
ties. However, we aim to conduct a study with persons
with cognitive disabilities in the future. The goal of
the study described here is two-fold: we aim to eval-
uate (1) the technical correctness of the system and
(2) the user’s reaction to system prompts. The reac-
tion of regular users to system prompts is a measure
whether the prompts are semantically reasonable to a
minimum degree: if regular users have problems un-
derstanding the prompts, they might most likely be
inappropriate for persons with cognitive disabilities.
The 26 trials were performed by 13 users. Each user
performed a single trial in each of two different sce-
narios: in the free scenario, users received the instruc-
tion to brush teeth as they would regularly do. The
system generates prompts if necessary according to
the user’s task execution. In the collaborative sce-
nario, the user is instructed to perform the brushing
task in collaboration with the system: the user ought
to follow the prompts whenever they are appropriate.
6.1 Technical Correctness and System
Improvement
The technical correctness of the TEBRA system
is highly dependent on the performance of the hi-
erarchical recognition framework and the planning
and decision making framework. In the hierarchi-
cal recognition framework, we can’t distinguish be-
tween rinse mouth clean and rinse mouth wet be-
cause the behavioral variables are nearly identical
for both behaviors. In the planning framework,
we need to distinguish between rinse mouth clean
and rinse mouth wet since the behaviors are dif-
ferent in terms of preconditions and effects in Ta-
ble 3. Rinse mouth wet describes taking water be-
fore brushing the teeth and rinse mouth clean is per-
formed after the brushing step. We apply a sim-
ple heuristic: when rinse mouth is classified by the
hierarchical recognition framework, it will be set
to rinse mouth wet if brush teeth has already been
recognized in a trial. Otherwise, rinse mouth will
be set to rinse mouth clean. We apply the same
heuristic for rinse mug fill (before brush teeth) and
rinse mug clean (after brush teeth) which are sub-
sumed to a common behavior rinse mug in the recog-
nition framework. Table 4 shows the classifica-
tion rates of the user behaviors: The classification
Table 4: Classification rates of user behaviors. RMgC -
rinse mug clean, RMgF - rinse mug fill, UT - use towel,
PB - paste on brush, RMC - rinse mouth clean, RMW -
rinse mouth wet, BT - brush teeth, CB - clean brush, N -
nothing.
RMW RMC RMgF RMgC BT PB CB UT N
RMW 79.5 0.0 0.0 0.0 0.0 0.6 0.0 0.0 19.9
RMC 32.5 42.0 2.4 1.6 0.0 0.1 9.9 0.0 11.5
RMgF 1.9 0.8 86.0 4.4 0.0 0.0 3.9 0.0 3.0
RMgC 0.0 6.2 0.0 78.8 0.0 0.0 0.5 8.0 6.6
BT 0.6 0.0 0.1 0.0 70.0 25.6 0.3 1.0 2.4
PB 0.0 0.0 0.0 0.0 0.5 99.2 0.0 0.0 0.3
CB 0.8 0.0 0.2 1.8 1.9 6.6 85.4 0.1 3.2
UT 0.0 0.0 0.0 0.2 0.1 0.6 0.0 87.1 12.1
N 3.9 2.4 1.3 1.4 2.8 22.8 2.0 9.8 53.7
rates of rinse mug fill, paste on brush, clean brush
and use towel are very good with 86%, 99.2%,
85.4% and 87.1%, respectively. However, the rate
of rinse mouth clean is very low with 42%. The
heuristic is highly dependent on the recognition of
brush teeth which has a classification rate of 70%.
The recognition of brush teeth is challenging: the
gyroscope in the brush sensor module measures the
change in orientation. The changes are integrated
over time to obtain the absolute orientation on which
the behavior variable brush movement is set. In the
integration process, small errors are accumulated. For
a behavior like brush teeth which usually has a long
duration compared to other behaviors, the accumula-
tion of errors leads to misclassifications: brush teeth
was mixed up with paste on brush in 25.6% of the
cases. However, the average classification rate of
75.7% over all user behaviors is a very good result
with regard to the huge variance in task execution.
TEBRA:AnAutomaticPromptingSystemforPersonswithCognitiveDisabilitiesinBrushingTeeth
21

Table 5: Coll - collaborative scenario, #P - number of
prompts, avg P - average nr of prompts, SC - semantically
correct prompts, C - correct reaction to a prompt, CSC -
correct reaction to a semantically correct prompt, dur - min-
imum(maximum) duration, FSR - final state reached.
#P avg P SC(%) C(%) CSC(%) dur FSR(%)
free 87 6.7 59 10 10 63(184) 8
coll 117 9 66 75 85 142(292) 100
6.2 System Performance
The performance of the TEBRA system in the col-
laborative scenario is excellent as depicted in column
FSR(%) in Table 5: Each of the 13 users reached the
final state in this scenario where users ought to fol-
low the prompts when appropriate. In the free sce-
nario, only a single user reached the final state: reg-
ular users have an individual way of executing the
task which may not coincide with the system’s frame-
work of action. In order to reach the final state, users
have to adapt to the system prompts. In the free sce-
nario, users were not explicitly encouraged to react
to prompts, but were instructed to brush their teeth as
they would regularly do. Since all users were capable
of brushing their teeth independently, all users except
one didn’t follow system prompts which leads to the
rate of 8%.
However, the excellent results in the collabora-
tive scenario shows that the system is able to as-
sist a user in trials which differ significantly in du-
ration: the minimum (maximum) duration in sec-
onds are 63(184) seconds in the free and 142(292)
in the collaborative scenario. The trials not only
differ in the overall durations, but also in the dura-
tions of single user behaviors. We cope with the
different behavior durations using the dynamic tim-
ing model as described in section 5.2.2. Exemplar-
ily, we show the advantage of the dynamic timing
model in two situations: in the first situation, the
timing model switched from user velocity slow to
fast. A subsequent user behavior rinse mouth wet
was correctly recognized using the timing param-
eters of fast. However, with the timing parame-
ters of slow, rinse mouth wet would not have been
recognized because the duration would have been
too short for the effects to occur. The recognition
of rinse mouth wet would have been missed by the
system. In a second situation, the timing model
switched from user velocity fast to slow. In the sub-
sequent user behavior brush teeth, a perception error
occurred and brush teeth was erroneously recognized
as paste on brush for a duration t. With the timing
parameters of velocity fast or medium, the system
would have erroneously recognized paste on brush
as a new behavior due to the decreased validation
time. With velocity slow, the duration t was too
short for paste on brush to be recognized. The timing
model avoided a perception error which would have
led to false prompts in further task execution.
6.3 Appropriate Prompting
An important measure of the performance of our sys-
tem is the number of prompts which are semanti-
cally correct. Semantically correct means that the
type of prompt is appropriate with regard to the user’s
progress in the task so far: we determine the seman-
tical correctness by using a ground truth annotation
of the behaviors in the task which was done by the
first author of the paper. In the collaborative sce-
nario, 66% of the total number of 117 prompts were
semantically correct as depicted in Table 5. The 34%
of semantically incorrect prompts contain follow-
up prompts arising from perception errors: when a
user behavior was successfully performed, but not
recognized correctly, the system delivers follow-up
prompts which are semantically incorrect. If we only
regard the first prompts of the system in each trial, the
number of semantically correct prompts increases to
92% which is a very good rate based on the complex-
ity of the task.
The user’s reaction to prompts measures whether
the prompts are meaningful to the user. The reac-
tion of the user is correct when he/she updates the
behavior to what was prompted by the system. We
found 75% of correct reactions in the collaborative
scenario including semantically correct and incorrect
prompts. Correct reactions to semantically correct
prompts are much higher with 85%. A major chal-
lenge in enhancing the TEBRA system will be the
increase of semantically correct prompts which de-
pends highly on the performance of the hierarchical
recognition framework. The system performance is
very good measured in terms of correct reactions to
prompts which are appropriate for the user. Addi-
tionally to the appropriateness of prompts in terms
of timing and meaning, we asked the users to judge
the modality of the prompts in terms of prompt dura-
tion and understandability in a questionnaire. Prompt
duration and understandability were evaluated with a
score of 5.5 and 6.1 of 7, respectively. A value of 1 de-
notes insufficient and 7 denotes perfectly good. This
result underlines that the prompts are understandable
at least to regular persons. We will evaluate in a fu-
ture study whether persons with cognitive disabilities
are also able to follow the prompts. We are optimistic,
because the prompting modalities were selected as a
result of interviews with caregivers of Haus Bersaba
who found the modalities of prompting to be appro-
HEALTHINF2013-InternationalConferenceonHealthInformatics
22

priate for the target group.
The results show that the TEBRA system is able
to deal with the huge variance in spatial and tempo-
ral execution of the task: the system mostly gives se-
mantically correct prompts and is able to assist users
through the entire task of brushing teeth.
7 CONCLUSIONS
In this paper, we describe a novel cognitive assis-
tive technology: the TEBRA system aims to assist
users with cognitive disabilities in the complex task
of brushing teeth. We use a structured approach based
on IU analysis by utilizing the results in the develop-
ment of the TEBRA system. We tackle the huge vari-
ance in spatial and temporal execution of the task: in
the hierarchical recognition framework, we abstract
from tracking objects or the user’s hands. Instead, we
infer behaviors based on the environmental state of
objects. We deal with the temporal variance in task
execution in our planning framework: we apply a Fi-
nite State Machine and a dynamic timing model to
allow for different velocities of users. We showed in
a study with regular users that the TEBRA system is
able to monitor the user’s progress in the task and pro-
vide appropriate prompts to the user if necessary. The
user’s reactions show that prompting modalities are
meaningful to a minimum degree with regard to reg-
ular users. Due to the structured approach using IU
analysis, the TEBRA system can be easily extended
to different tasks.
Future work includes technical enhancements of
the system: we aim to recognize user behaviors more
robustly by improving the classification mechanisms.
We will enhance the dynamic timing model by learn-
ing the parameters on a larger set of training data. We
aim to evaluate the TEBRA system with persons with
cognitive disabilities in the near future.
ACKNOWLEDGEMENTS
The authors would like to thank the inhabitants and
caregivers of Haus Bersaba for their cooperation. This
work was funded by the German Research Founda-
tion (DFG), Excellence Cluster 277 “Cognitive Inter-
action Technology“. Special thanks to Simon Schulz
from the CITEC Central Lab Facilities for integrating
the sensor module into the toothbrush.
REFERENCES
Bauchet, J., Giroux, S., Pigot, H., Lussier-Desrochers, D.,
and Lachapelle, Y. (2008). Pervasive assistance in
smart homes for people with intellectual disabilities:
a case study on meal preparation. Assistive Robotics
and Mechatronics, 9(4):42–54.
Giroux, S., Bauchet, J., Pigot, H., Lussier-Desrochers, D.,
and Lachappelle, Y. (2008). Pervasive behavior track-
ing for cognitive assistance. In PETRA’08, pages 1–7.
Hoey, J., Ploetz, T., Jackson, D., Monk, A., Pham, C., and
Olivier, P. (2011). Rapid specification and automated
generation of prompting systems to assist people with
dementia. Pervasive and Mobile Computing, 7(3):299
– 318.
Hoey, J., Poupart, P., Bertoldi, A. v., Craig, T., Boutilier, C.,
and Mihailidis, A. (2010). Automated handwashing
assistance for persons with dementia using video and
a partially observable markov decision process. Com-
puter Vision and Image Understanding, 114:503–519.
Moore, D., Essa, I., and Hayes, M. (1999). Object Spaces:
Context Management for Human Activity Recogni-
tion. In AVBPA’99.
Najjar, M., Courtemanche, F., Hamam, H., Dion, A., and
Bauchet, J. (2009). Intelligent recognition of activities
of daily living for assisting memory and/or cognitively
impaired elders in smart homes. Ambient Computing
and Intelligence, 1(4):46–62.
Nguyen, N., Phung, D., Venkatesh, S., and Bui, H. (2005).
Learning and detecting activities from movement tra-
jectories using the hierarchical hidden markov model.
In CVPR’05.
Patterson, D. J., Liao, L., Gajos, K., Collier, M., Livic,
N., Olson, K., Wang, S., Fox, D., and Kautz, H. A.
(2004). Opportunity knocks: A system to provide
cognitive assistance with transportation services. In
Ubicomp’04, pages 433–450.
Peters, C., Hermann, T., and Wachsmuth, S. (2011). Pro-
totyping of an automatic prompting system for a resi-
dential home. In RESNA/ICTA 2011 Conf. Proc. (on-
line).
Peters, C., Hermann, T., and Wachsmuth, S. (2012). User
behavior recognition for an automatic prompting sys-
tem - a structured approach based on task analysis. In
ICPRAM’12, pages 162–171.
Pollack, M. E., Brown, L. E., Colbry, D., McCarthy,
C. E., Orosz, C., Peintner, B., Ramakrishnan, S., and
Tsamardinos, I. (2003). Autominder: an intelligent
cognitive orthotic system for people with memory im-
pairment. Robotics and Autonomous Systems, 44(3–
4):273–282.
Pusiol, G., Patino, L., Bremond, F., Thonnat, M., and
Suresh, S. (2008). Optimizing Trajectories Clustering
for Activity Recognition. In MLVMA’08, Int. Work-
shop on Machine Learning for Vision-based Motion
Analysis.
Ryu, H. and Monk, A. (2009). Interaction Unit Analy-
sis: A New Interaction Design Framework. Human-
Computer Interaction, 24(4).
TEBRA:AnAutomaticPromptingSystemforPersonswithCognitiveDisabilitiesinBrushingTeeth
23
