
6D Visual Odometry with Dense Probabilistic Egomotion Estimation
Hugo Silva
1
, Alexandre Bernardino
2
and Eduardo Silva
1
1
INESC TEC Robotics Unit, ISEP, Rua Dr. Antonio Bernardino de Almeida 431, Porto, Portugal
2
Institute of Systems and Robotics, IST, Avenida Rovisco Pais 1, Lisboa, Portugal
Keywords:
Visual Navigation, Stereo Vision, Visual Odometry, Egomotion.
Abstract:
We present a novel approach to 6D visual odometry for vehicles with calibrated stereo cameras. A dense
probabilistic egomotion (5D) method is combined with robust stereo feature based approaches and Extended
Kalman Filtering (EKF) techniques to provide high quality estimates of vehicle’s angular and linear velocities.
Experimental results show that the proposed method compares favorably with state-the-art approaches, mainly
in the estimation of the angular velocities, where significant improvements are achieved.
1 INTRODUCTION
Visual Odometry is the term generically used to de-
note the process of estimating linear and angular ve-
locities of a vehicle equipped with vision cameras
(Scaramuzza and Fraundorfer, 2011). These systems
are becoming ubiquitous in mobile robotics applica-
tions due to the availability of low-cost high qual-
ity cameras and their ability to complement the mea-
surements provided by Inertial Measurement Units
(IMU). Because vision sensors ground their percep-
tion on static features of the environment, they are in
principle less prone to the estimation bias rather com-
mon on IMU sensors. In this work we focus on the
development of Visual Odometry Systems for mobile
robots equipped with a calibrated stereo camera setup.
Visual Odometry Systems are an important com-
ponent on mobile robot’s navigation systems. The
short term velocity estimates provided Visual Odome-
try has been shown to improve the localization results
of Simultaneous Localization and Mapping (SLAM)
methods. For instance in (Alcantarilla et al., 2010),
Visual Odometry measurements are used as priors for
the prediction step of a robust EKF-SLAM algorithm.
Visual Odometry systems have been continuously
developed over the past 30 years. These systems suf-
fered a major outbreak due to the outstanding work of
(Maimone and Matthies, 2005) on NASA Mars Rover
Program. Nister ((Nist
´
er, 2004)) developed a Visual
Odometry system, based on a 5-point algorithm, that
became the standard algorithm for comparison of Vi-
sual Odometry techniques. This algorithm can be
used either in stereo or monocular vision approaches
and consists on the use of several visual processing
techniques, namely: feature detection and matching,
tracking, stereo triangulation and RANSAC (Fischler
and Bolles, 1981) for pose estimation with iterative
refinement.
In (Moreno et al., 2007) it is proposed a visual
odometry estimation method using stereo cameras. A
closed form solution is derived for the incremental
movement of the cameras and combines distinctive
features SIFT (Lowe, 2004) with sparse optical flow.
There are already some approaches to stereo vi-
sual odometry estimation using dense methods like
the one developed by (Comport et al., 2007), that uses
a quadrifocal warping function to track features us-
ing dense correspondences to correctly estimate 3D
visual odometry.
In (Domke and Aloimonos, 2006), a method for
estimating the epipolar geometry describing the mo-
tion of a camera is proposed using dense probabilis-
tic methods. Instead of deterministically choosing
matches between two images, a probability distribu-
tion is computed over all possible correspondences.
By exploiting a larger amount of data, a better perfor-
mance is achieved under noisy measurements. How-
ever, that method is more computationally expensive
and does not recover translational scale factor.
In our work, we propose the use of a dense prob-
abilistic method such as in (Domke and Aloimonos,
2006) but with two important additions: (i) a sparse
feature based method is used to estimate the trans-
lational scale factor and (ii) a fast correspondence
method using a recursive ZNCC implementation is
provided for computational efficiency.
361
Silva H., Bernardino A. and Silva E..
6D Visual Odometry with Dense Probabilistic Egomotion Estimation.
DOI: 10.5220/0004196103610365
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 361-365
ISBN: 978-989-8565-48-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

Our method, denoted 6DP combines sparse fea-
ture detection and tracking for stereo-based depth
estimation, using highly distinctive SIFT features
(Lowe, 2004) and a variant of the dense probabilistic
ego-motion method developed by (Domke and Aloi-
monos, 2006) to estimate camera motion up to a trans-
lational scale factor. Upon obtaining two registered
point sets in consecutive time frames, an Absolute
Orientation method, defined as an orthogonal Pro-
crustes problem (AO) is used to recover yet unde-
termined motion scale. The velocities obtained by
the proposed method are then filtered with a EKF ap-
proach to reduce sensor noise and provide frame-to-
frame filtered linear and angular velocity estimates.
Our method was compared with the methods in
LIBVISO Visual Odometry Library (Kitt et al., 2010),
using standard dataset from this library. Ground truth
is also provided, through the fusion of IMU and
GPS measurements. Results show that our method
presents significant improvements in the estimation of
angular velocities and a similar performance for linear
velocities. The benefits of using dense probabilistic
approaches are thus validated in a real world scenario
with practical significance.
2 6D VISUAL ODOMETRY USING
DENSE AND SPARSE
EGO-MOTION ESTIMATION
Our solution is based on the probabilistic method of
egomotion estimation using the epipolar constraint
developed by (Domke and Aloimonos, 2006). How-
ever, the method from (Domke and Aloimonos, 2006)
is unable to estimate motion scale, so a stereo vi-
sion sparse feature based approach that uses detected
SIFT features correspondence between I
T k
and I
T k+1
is used to obtain translation motion scale.
An architecture of our method is displayed in fig-
ure 1. In summary, it is composed by the following
main steps:
1. First, SIFT feature points are detected in the cur-
rent pair of stereo frames (I
L
T k
, I
R
T k
), using a known
feature detector. These image feature points are
then correlated between left and right image to ob-
tain 3D point depth information.
2. Second, we use a dense image pixel correlation
method, that due to its probabilistic nature, does
not commit the match correlation of image point
P
k
(x, y) in I
L
T k
to other image point P
k
(x, y) in
I
L
T k+1
. Instead, it copes with several hypothe-
sis of matching for image point P
k
(x, y) in I
L
T k+1
,
thus making the estimation of the essential matrix
Figure 1: 6D Visual Odometry System Architecture.
E
s
more robust to image feature matching errors
and hence providing a more accurate camera mo-
tion estimation [R,t] between I
T k
and I
T k+1
. The
dense likelihood correspondence maps are com-
puted based on ZNCC(Huang et al., 2011) corre-
lation.
3. Third, due to the need to determine the motion
scale between I
T k
and I
T k+1
, a Procrustes abso-
lute orientation method(AO) is utilized. The AO
method uses 3D image feature points obtained
by triangulation from stereo image pairs (I
L
T k
, I
R
T k
)
and (I
L
T k+1
, I
R
T k+1
) combined with robust tech-
niques like RANSAC(Fischler and Bolles, 1981),
thus obtaining only good candidates (inliers) for
Procrustes based motion scale determination.
4. Finally, vehicle linear and angular velocity (V, Ω)
between I
T k
and I
T k+1
is determined.
All, of this steps are then encapsulated within an
Extended Kalman filter yielding a more robust camera
motion estimation.
2.1 Probabilistic Correspondence
The key to the proposed method relies in the con-
sideration of probabilistic rather than deterministic
matches. Usual methods for motion estimation con-
sider a match function M that associates coordinates
of points m = (x, y) in image 1 to points m
0
= (x
0
, y
0
)
in image 2 :
M(m) = m
0
(1)
Instead, the probabilistic correspondence method de-
fines a probability distribution over the points in im-
age 2 for all points in image 1:
P
m
(m
0
) = P(m
0
|m) (2)
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
362

Figure 2: Image feature Point correspondence for ZNCC
matching.
Thus, all points m
0
in image 2 are candidates for
matching with point m in image 1 with a priori like-
lihoods proportional to P
m
(m
0
). One can consider P
m
as images (one per each pixel in image 1) whose value
in m
0
is proportional to the likelihood of m
0
matching
with m. For the sake of computational cost, likeli-
hoods are not computed for the whole range in image
2 but just to windows around m (or suitable predic-
tions given prior information), see figure 2.
In (Domke and Aloimonos, 2006) this value was
computed via the normalized product, over a filter
bank of Gabor filters with different orientation and
scales, of the exponential of the negative differences
between the angle of the Gabor filter responses in m
and m
0
.
The motivation for using a Gabor filter bank was
the robustness of their responses to changes in the
brightness and contrast of the image. However, the
computations demand a significant computational ef-
fort, thus we propose to perform the computations
with the well known Zero Mean Normalized Cross
Correlation function(ZNCC).
This function is also known to be robust to bright-
ness and contrast changes and recent efficient recur-
sive schemes developed by Huang et al (Huang et al.,
2011) render it suitable to real-time implementations.
That method is faster to compute and yields the same
quality as the method of Domke.
2.1.1 Probabilistic Egomotion
From two images of the same camera, one can recover
its motion up to the translation scale factor. This can
be represented by the epipolar constraint which, in ho-
mogeneous normalized coordinates can be written as:
(s
0
)
T
Es = 0 (3)
where E is the so called Essential Matrix (Hartley and
Zisserman, 2004), a 3X3 matrix with rank 2 and 5
degrees-of-freedom. Intuitively, this matrix expresses
the directions in image 2 that should be searched for
matches of points in image 1. It can be factored by:
E = R [t]
×
(4)
where R and t are, respectively, the rotation and trans-
lation of the camera between the two frames.
To obtain the Essential matrix from the probabilis-
tic correspondences, (Domke and Aloimonos, 2006)
proposes the computation of a probability distribution
over the (5-dimensional) space of essential matrices.
Each dimension of the space is discretized in 10 bins,
thus leading to 100000 hypotheses E
i
. For each point
s the likelihood of these hypotheses are evaluated by:
P(E
i
|s) ∝
max
s
0
: (s
0
)
T
E
i
s = 0 P
s
(s
0
) (5)
Intuitively, for a single point s in image 1, the like-
lihood of a motion hypothesis is proportional to the
best match obtained along the epipolar line generated
by the essential matrix. Assuming independence, the
overall likelihood of a motion hypothesis is propor-
tional to the product of the likelihoods for all points:
P(E
i
) ∝ Π
s
P(E
i
|s) (6)
After a dense correspondence probability distri-
bution has been computed for all points, the method
(Domke and Aloimonos, 2006) computes a probabil-
ity distribution over motion hypotheses represented
by the epipolar constraint. Finally, given the top
ranked motion hypotheses, a Nelder-Mead simplex
method (Lagarias et al., 1998) is used to refine the
motion estimate.
However, since the current method does not allow
motion scale recovery, translation T
s
component does
not contain image scale information. This type of in-
formation, is calculated by an alternative absolute ori-
entation method like the Procrustes method.
2.2 Procrustes Analysis and Scale
Factor Recovery
The Procrustes method allows to recover rigid body
motion between frames, through the use of 3D point
matches. We assume a set of 3D features (computed
by triangulation of SIFT features) in instant t
T k
be de-
scribed by
{
X
0
i
}
T k
, move to a new position and orien-
tation in t
T k+1
, described by
{
Y
0
i
}
T k+1
. This transfor-
mation can be represented as:
Y
0
i
= RX
0
i
+ T (7)
where Y
0
i
points, are 3D feature points in I
T k+1
.
These points were detected using SIFT descriptors
between I
L
T k
and I
L
T k+1
, that were triangulated to their
stereo corresponding matches in I
R
T k+1
.
6DVisualOdometrywithDenseProbabilisticEgomotionEstimation
363
These two sets of points are the ones that are used
by Procrustes method to estimate motion scale.
In order to estimate motion [R,T], a cost function
that measures the sum of squared distances between
corresponding points is used.
c
2
=
n
∑
i
Y
0
i
− (RX
0
i
+ T )
2
(8)
Performing minimization of equation (8), gives
estimates of [R, T ]. Although conceptually simple,
some aspects regarding the practical implementation
of the Procrustes method must be taken into con-
sideration. Namely, since this method is very sen-
sible to data noise, obtained results tend to vary in
the presence of outliers. To overcome this diffi-
culty, RANSAC (Fischler and Bolles, 1981) is used
to discard possible outliers within the set of matching
points.
For a correct motion scale estimation, it is nec-
essary to have a proper spatial feature distribution
through out the image. For instance, if the Procrustes
method uses all obtained image feature points without
having their image spatial distribution into consider-
ation, the obtained motion estimation [R,T] between
two consecutive images could turn out biased.
Given these facts, to avoid having biased samples
in the RANSAC phase of the algorithm, a bucket-
ing technique (Zhang et al., 1995) is implemented to
assure a unbiased image feature distribution sample.
After, completing all this steps, only valid points are
used in Procrustes method application. We then use
an Extended Kalman filter to help robust camera lin-
ear and angular velocity estimates, and also to esti-
mate vehicle pose between different time frames.
3 RESULTS
To illustrate the performance of our 6D Visual Odom-
etry method, we compared our system performance
against LIBVISO (Kitt et al., 2010), which is a stan-
dard library for computing 6 DOF motion. We also
compared our performance against Inertial Measure-
ment Unit (RTK-GPS information) using part of one
of Kitt et al(Kitt et al., 2010) Karlsruhe dataset se-
quences.
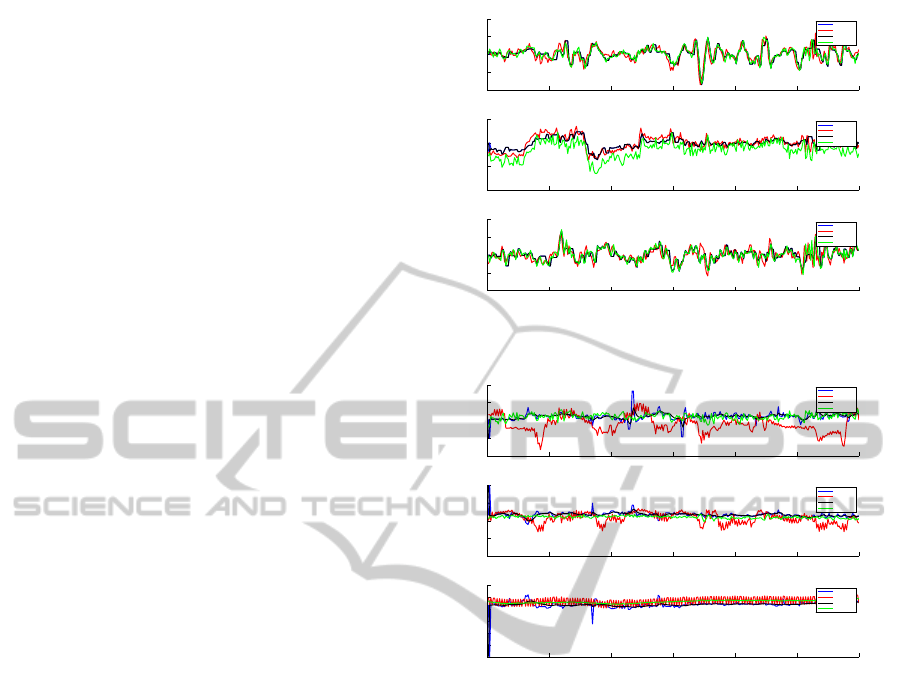
In figure 3 one can observe angular velocity esti-
mation from both IMU and LIBVISO, together with
6dp-RAW and EKF filtered measurements. All vision
approaches obtained results are consistent with the In-
ertial Measurement Unit, but the 6dp-EKF displays a
better performance in what respects the angular veloc-
ities. These results are stated in table (1), where root
0 50 100 150 200 250 300
−2
−1
0
1
2
Angular Velocity Wx
Frame Index
Wx degree/s
6dp−RAW
IMU
6dp−EKF
LIBVISO
0 50 100 150 200 250 300
−1
−0.5
0
0.5
Angular Velocity Wy
Frame Index
Wy degree/s
6dp−RAW
IMU
6dp−EKF
LIBVISO
0 50 100 150 200 250 300
−2
−1
0
1
2
Angular Velocity Wz
Frame Index
Wz degree/s
6dp−RAW
IMU
6dp−EKF
LIBVISO
Figure 3: Angular Velocity Estimation Results.
0 50 100 150 200 250 300
−0.1
0
0.1
0.2
0.3
Linear Velocity Vx
Frame Index
Vx m/s
6dp−RAW
IMU
6dp−EKF
LIBVISO
0 50 100 150 200 250 300
−0.8
−0.6
−0.4
−0.2
0
Linear Velocity Vy
Frame Index
Vy m/s
6dp−RAW
IMU
6dp−EKF
LIBVISO
0 50 100 150 200 250 300
0
1
2
3
4
5
6
Linear Velocity Vz
Frame Index
Vz m/s
6dp−RAW
IMU
6dp−EKF
LIBVISO
Figure 4: Linear Velocity Estimation Results.
mean square error between IMU and LIBVISO, 6DP-
EKF estimation are displayed. Both methods display
considerable low standard deviation results, but with
6DP-EKF displaying 50% less than LIBVISO for the
angular velocities estimation.
Although not as good as the angular velocities, the
6dp-EKF method also displays a stable performance
in obtaining linear velocity estimates using the sparse
feature approach based on SIFT features combined
with Procrustes Absolute Orientation method, as dis-
played in figure 4.
4 CONCLUSIONS AND FUTURE
WORK
In this paper, we developed a novel method for con-
ducting 6D visual odometry based on the use of dense
Probabilistic Egomotion estimation approach. We
also complemented this method with a sparse feature
approach for estimating image depth. We tested the
proposed algorithm against a state-of-the-art 6D vi-
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
364
Table 1: Standard Mean Squared Error between IMU and Visual Odometry (LIBVISO and 6dp-EKF).
V
x
V
y
V
z
Ω
x
Ω
y
Ω
z
LIBVISO 0.0674 0.7353 0.3186 0.0127 0.0059 0.0117
6DP-EKF 0.0884 0.0748 0.7789 0.0049 0.0021 0.0056
sual Odometry Library such as LIBVISO.
The presented results demonstrate that 6DP per-
forms accurately when compared to other techniques
for 6-DOF visual Odometry estimation, yielding ro-
bust motion estimation results, mainly in the angular
velocities estimation results.
In future work, we want to extend our dense prob-
abilistic method to developed a standalone approach
for ego-motion estimation that can cope with motion
scale estimation, by using other type of multiple view
geometry parametrization.
ACKNOWLEDGEMENTS
This work is financed by the ERDF
ˆ
a European Re-
gional Development Fund through the COMPETE
Programme (operational programme for competitive-
ness) and by National Funds through the FCT Funda-
cao para a Ciencia e a Tecnologia (Portuguese Foun-
dation for Science and Technology) within project
FCOMP - 01-0124-FEDER-022701 and under grant
SFRH / BD / 47468 / 2008 .
REFERENCES
Alcantarilla, P., Bergasa, L., and Dellaert, F. (2010). Vi-
sual odometry priors for robust EKF-SLAM. In IEEE
International Conference on Robotics and Automa-
tion,ICRA 2010, pages 3501–3506. IEEE.
Civera, J., Grasa, O., Davison, A., and Montiel, J. (2010). 1-
Point RANSAC for EKF filtering. Application to real-
time structure from motion and visual odometry. Jour-
nal of Field Robotics, 27(5):609–631.
Comport, A., Malis, E., and Rives, P. (2007). Accurate
Quadri-focal Tracking for Robust 3D Visual Odom-
etry. In IEEE International Conference on Robotics
and Automation, ICRA’07, Rome, Italy.
Domke, J. and Aloimonos, Y. (2006). A Probabilistic
Notion of Correspondence and the Epipolar Con-
straint. In Third International Symposium on 3D
Data Processing, Visualization, and Transmission
(3DPVT’06), pages 41–48. IEEE.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: A paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Communications of the ACM, 24(6):381–395.
Hartley, R. I. and Zisserman, A. (2004). Multiple View Ge-
ometry in Computer Vision. Cambridge University
Press, ISBN: 0521540518, second edition.
Huang, J., Zhu, T., Pan, X., Qin, L., Peng, X., Xiong, C.,
and Fang, J. (2011). A high-efficiency digital image
correlation method based on a fast recursive scheme.
Measurement Science and Technology, 21(3).
Kitt, B., Geiger, A., and Lategahn, H. (2010). Visual odom-
etry based on stereo image sequences with ransac-
based outlier rejection scheme. In IEEE Intelligent Ve-
hicles Symposium (IV), 2010, pages 486–492. IEEE.
Lagarias, J. C., Reeds, J. A., Wright, M. H., and Wright,
P. E. (1998). Convergence properties of the nelder–
mead simplex method in low dimensions. SIAM J. on
Optimization, 9(1):112–147.
Lowe, D. (2004). Distinctive image features from scale-
invariant keypoints. International journal of computer
vision, 60(2):91–110.
Maimone, M. and Matthies, L. (2005). Visual Odometry on
the Mars Exploration Rovers. In IEEE International
Conference on Systems, Man and Cybernetics, pages
903–910. Ieee.
Moreno, F., Blanco, J., and Gonz
´
alez, J. (2007). An efficient
closed-form solution to probabilistic 6D visual odom-
etry for a stereo camera. In Proceedings of the 9th
international conference on Advanced concepts for
intelligent vision systems, pages 932–942. Springer-
Verlag.
Ni, K., Dellaert, F., and Kaess, M. (2009). Flow separation
for fast and robust stereo odometry. In IEEE Interna-
tional Conference on Robotics and Automation ICRA
2009, volume 1, pages 3539–3544.
Nist
´
er, D. (2004). An efficient solution to the five-point rel-
ative pose problem. IEEE Trans. Pattern Anal. Mach.
Intell., 26:756–777.
Nist
´
er, D., Naroditsky, O., and Bergen, J. (2006). Visual
odometry for ground vehicle applications. Journal of
Field Robotics, 23(1):3–20.
Scaramuzza, D. and Fraundorfer, F. (2011). Visual odom-
etry [tutorial]. Robotics Automation Magazine, IEEE,
18(4):80 –92.
Scaramuzza, D., Fraundorfer, F., and Siegwart, R. (2009).
Real-time monocular visual odometry for on-road ve-
hicles with 1-point ransac. In Robotics and Automa-
tion, 2009. ICRA ’09. IEEE International Conference
on, pages 4293 –4299.
Zhang, Z., Deriche, R., Faugeras, O., and Luong, Q.-T.
(1995). A robust technique for matching two uncal-
ibrated images through the recovery of the unknown
epipolar geometry. Artificial Intelligence Special Vol-
ume on Computer Vision, 78(2):87 – 119.
6DVisualOdometrywithDenseProbabilisticEgomotionEstimation
365
