
A Search Engine for Retrieval and Inspection of Events with
48 Human Actions in Realistic Videos
G. J. Burghouts, L. de Penning, M. Kruithof, P. Hanckmann, J-M Ten Hove, S. Landsmeer,
S. P. van den Broek, R. den Hollander, C. van Leeuwen, S. Korzec, H. Bouma and K. Schutte
TNO, The Hague, The Netherlands
Keywords: Human Behavior Understanding, Search Engine, Video Retrieval, Action Recognition, Textual Description,
Meta Data, Indexing, 48 Human Actions.
Abstract: The contribution of this paper is a search engine that recognizes and describes 48 human actions in realistic
videos. The core algorithms have been published recently, from the early visual processing (Bouma, 2012),
discriminative recognition (Burghouts, 2012) and textual description (Hanckmann, 2012) of 48 human
actions. We summarize the key algorithms and specify their performance. The novelty of this paper is that
we integrate these algorithms into a search engine. In this paper, we add an algorithm that finds the relevant
spatio-temporal regions in the video, which is the input for the early visual processing. As a result, meta-
data is produced by the recognition and description algorithms. The meta-data is filtered by a novel
algorithm that selects only the most informative parts of the video. We demonstrate the power of our search
engine by retrieving relevant parts of the video based on three different queries. The search results indicate
where specific events occurred, and which actors and objects were involved. We show that events can be
successfully retrieved and inspected by usage of the proposed search engine.
1 INTRODUCTION
Recognizing and inspecting human activities is
essential to security (robbery, vandalism), public
safety (aggression, riots), health care (incidents with
elderly people), commerce (shopping behavior) and
also to users of the internet (searching YouTube
videos). In this paper, we provide a solution for
detecting and retrieving 48 human behaviors in
realistic videos, like CCTV feeds or archives. We
adopt algorithms from the state-of-the-art to perform
the video processing and recognition of actions and
textual description of events. Our goal is to
demonstrate the power of a search engine that
combines action recognition algorithm with a
algorithm that described the recognized actions. We
will show that the proposed search engine enables
the user to find relevant events in realistic videos.
The demonstrated examples are the retrieval of a
rare event (a person who is digging), an event that
involves the meeting of multiple people (persons
that approach each other), and a complex event
where two persons exchange an item.
The key algorithms are summarized in Sections 2
to 7, from early visual processing to producing the
meta-data that the search engine uses to retrieve
relevant events. For extensive discussion of state-of-
the-art and related work, we refer to our previous
papers on which the current paper is based, please
see the references. The search engine is
demonstrated in Section 9. In Section 10 we outline
our final conclusions.
2 48 HUMAN ACTIONS
Our search engine has been trained on the visint.org
dataset, which includes 4,774 videos of a wide range
of clips that involve 48 human actions, in various
forms including humans inside a car or on a motor
bike or bicycle, where multiple human actions may
happen at the same time, or just before or after each
other. The actions vary from single person (e.g.
walk) to two or more persons (e.g. follow). Some of
these actions are defined by the involvement of
some object (e.g. give), or an interaction with the
environment (e.g. leave). The most complex actions
involve two persons and an object (e.g. exchange,
throw-catch combination).
413
J. Burghouts G., de Penning L., Kruithof M., Hanckmann P., Ten Hove J., Landsmeer S., P. van den Broek S., den Hollander R., van Leeuwen C., Korzec
S., Bouma H. and Schutte K. (2013).
A Search Engine for Retrieval and Inspection of Events with 48 Human Actions in Realistic Videos.
In Proceedings of the 2nd International Conference on Pattern Recognition Applications and Methods, pages 413-418
DOI: 10.5220/0004196904130418
Copyright
c
SciTePress

3 EARLY VISUAL PROCESSING
Since the actions involve humans, and sometimes
also vehicles, we use dedicated person, car and bike
detectors (Felzenszwalb et al., 2010) and a generic
moving object detector (Stauffer and Grimson,
1999); (Withagen et al., 2004). These methods
deliver the bounding boxes, which are tracked by
applying a local search for the best frame to frame
match. World knowledge is included to improve the
tracking. We know that typical trajectories are
mostly horizontal and have typical velocities of a
few pixels per frame. Non-moving but shaky objects
are usually false. Such prior knowledge is included
in order to merge object detections and to reduce
false detections. The detected objects in the scene
are referred to as ‘entities’.
4 SPATIAL AND TEMPORAL
EXTENT OF HUMAN ACTIONS
The next step is to find the parts in the video where
particular events take place. We do so by
segmenting the video into spatio-temporally
confined regions. We refer to the initiative-taking
entity as an ‘agent’. The goal is to find the relevant
agents and their relations with other entities and
items.
Based on the detected entities and their bounding
box and classification type (i.e., person, car, bike or
other) our search engine determines the spatial and
temporal extent of possible human actions. The
engine calculates for each agent (an object classified
as person, car or bike) possible spatio-temporal
relations with other objects.
To determine whether these regions indeed
contain informative human actions, each agent and
its relations are passed on to the next level where
features are computed, actions are recognized, and
unlikely hypotheses are filtered.
5 ACTION FEATURES
In our search engine, we consider two
complementary types of human action features, EP
features which are based on bounding-boxes, and
STIP features which are local features in space-time.
5.1 Localized Motion Features
The STIP features (Laptev, 2005) are regionally
computed at spatio-temporal interest points, i.e. a
3D Harris detector that is an extension of the well-
known 2D corner detector. The features comprise of
histograms of gradients (HOG) and optical flow
(HOF). Together these two feature types capture
qualities about local shape and motion. The STIP
features are computed with Laptev's implementation
(Laptev, 2005), version 1.1, with default parameters.
Our STIP based feature vector are the 162 STIP
HOG-HOF features.
5.2 Event Properties
The rationale is to design features that capture the
semantically meaningful properties of the person
and his/her actions, including kinematics, trajectory,
interactions with other persons and items. These
Event Properties (EP) features are a set of event-
related attributes of entities, interactions and
involved items. A distinction is made between
single-entity EP features (e.g. type of entity; an
entity moves horizontal; a person moves his arm,
etc.), multiple-entity and relational properties (e.g.
one entity approaches another entity; etc.) and global
properties (e.g. there is more than one entity in the
scene; etc.). In some cases, direct implementation is
not possible, for instance with a person that holds an
item, as the item that is carried by the person is not
detectable. Instead, we chose for a good trade-off
between the information of the property and the
likeliness of detecting it. In the case of the carried
item, we implemented the derivative: the ‘one-arm-
out’ pose. Given that we are interested mainly in
events, like the exchange of an item, this is the best
clue that some item is handed over to another
person. Pose estimation (Ramanan, 2006) is
projected onto a set of 7 pose types that are relevant
for the 48 behaviors. In total, 86 EP features are
collected, of which 65 are single-entity, 13 are
multi-entity, and 8 are global properties. An EP
based feature vector used in this work lists the
changes of these 86 EP features per entity.
6 DETECTION OF ACTIONS
Our search engine consists of a recognizer that
detects 48 human actions in videos, and a descriptor
that provides textual descriptions. Our recognizer
consists of 48 detectors, one for each human action.
We create action detectors from a pipeline of
local spatio-temporal STIP features (Laptev, 2005),
a random forest to quantize the features into action
histograms (Moosmann et al., 2006), and a SVM
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
414

classifier with a χ
2
kernel (Zhang et al., 2007)
serving as a detector for each action. For the random
forest we use Breiman and Cutler's implementation
(Breiman, 2001), with the M-parameter equal to the
total number of features values. For the SVM we use
the libSVM implementation (Chang and Lin, 2001),
where the χ
2
kernel is normalized by the mean
distance across the full training set (Zhang et al.,
2007), with the SVM's slack parameter default C=1.
The weight of the positive class is set to
(#pos+#neg)/#pos and the weight of the negative
class to (#pos+#neg)/#neg, where #pos is the size of
the positive class and #neg of the negative class (van
de Sande, 2010).
The novelties with respect to the above pipeline
are: (1) We have improved the selection of negative
examples during training (Burghouts and Schutte,
2012). The rationale is to select negatives that are
semantically similar to the positive class. This gives
an average improvement of approx. 20%. (2) We
have improved the detection of each action, by
fusion of all actions in a second stage classification.
For each action, we create a second stage SVN
classifier that takes the first stage classifiers’
outputs, i.e. the posterior probability of each action
detector, as a new feature vector (Burghouts and
Schutte, 2012). The improvement is approx. 40%.
The combination of both improvements yields an
overall improvement is 50% for the detection of the
48 human actions.
The recognizer’s performance is measured by the
Matthews Correlation Coefficient, MCC = ( TP·TN
- FP·FN ) / sqrt( (TP+FP) · (TP+FN) · (TN+FP) ·
(TN+FN)), where T=true, F=false, P=positive and
N=negative. This performance measure is
independent of the sizes of the positive and negative
classes. This is important for our evaluation purpose,
as there are +1,000 positive samples for “move”, to
61 samples for “bury”. . The actions that go well
(MCC > 0.2) are: Dig, Hold, Throw, Receive, Carry,
Bounce, Raise, Replace, Exchange, Bury, Lift,
Hand, Open, Haul. Fair performance 0.1 ≤ MCC ≤
0.2 is achieved for: Touch, Give, Kick, Take,
Pickup, Fly, Drop, Snatch. Actions that do not go
well (MCC < 0.1) are: Hit, Catch, Putdown, Push,
Attach, Close. The average MCC = 0.23.
7 DESCRIPTION
Based on the actions classified by the action
recognizer a textual description of the scene is
generated. The description is generated by a Rule
Based System (RBS). The RBS (Hanckmann et al.,
2012) encodes world knowledge about the actions
and encodes these as rules. There are 73 rules
describing 48 actions. The rules specify a set of
conditions. The conditions are based on the
properties and relations as generated by the Event
Properties (see 5.2).
The RBS connects the action with the entity or
entities involved in the action. It determines which
actor is the sentence subject and, if present, which
object or actors are involved as direct or indirect
objects. Subsequently, the description sentence is
constructed using the action as an action combined
with the subjects and objects, and a number of
templates. A sentence is considered to at least
contain a subject and an action.
7.1 RBS Algorithm
Based on the rules, a multi hypotheses tree is
constructed. Each hypotheses is a combination of
possible entities and/or object connected with the
action. The hypothesis score is higher when more
conditions are met.
There are a three condition types: entity/object
properties (event properties that are expected to be
valid for an entity/object in combination with an
action) entity/object relations (event properties that
are expected to be valid describing the relation two
entities/objects have), temporal ordering (temporal
properties of the previous two condition types, e.g.
the order of actions in time).
The description describes the actions with the
highest probabilities (maximum of seven actions
with a minimum probability of 0.7). From these
actions, the hypothesis with the highest score is
selected and used in the sentence construction.
7.2 Description Performance
The description generator is evaluated on 241 short
videos (visint.org) with ground truth. The ground
truth consist of 10 sentences per video, written by 10
different people. Per video the number of different
annotated actions is approximately 5.
For each ground truth (GT) sentence we extract,
using The Stanford Parser (see last reference), the
action, subject, and object(s) and compare these with
the system response (SR) of the RBS.
We calculate two scores: a union and a percentage
score. The clip’s union score is the best match for all
sentence pairs (the percentage of clips with at least
one agreement between GT and SR); its percentage
score is the mean match corrected for the minimum
number of the amount of ground truth sentences and
ASearchEngineforRetrievalandInspectionofEventswith48HumanActionsinRealisticVideos
415
the amount of generated sentences (the agreement
between the sets of GT and SR).
Table 1: Scores of the textual description of actions.
Description
Score
Overall Action Subject Objects
union
percentage
68.3%
40.4%
92.3%
59.3%
62.0%
30.5%
67.8%
31.5%
8 SELECTION CRITERIA
In our pipeline, the spatio-temporal regions in the
video are defined at the front-end. In this section, we
call these regions ‘actions’. Often, the actions are
not informative: e.g. there are many ‘walk’ instances
that are not relevant to the end-user. We need a filter
on the meta-data that has been produced by the
recognition and description algorithms.
To determine which actions should be selected,
we present the following model. Each detected
entity is assigned a confidence
, an estimate for
the chance that entity is indeed an entity. Each
action consists of an agent, an entity which is the
subject of the action and zero or more entities and
multiple detected verbs. Each verb also has a
confidence
|
, which is an estimate for the
chance that that verb is detected given the fact that
the entity is detected. Furthermore each verb has a
relevance
. The relevance scales between 1 and
0 with 1 being false negatives are much more costly
than false positives and 0 being false positives are
much more costly than false positives.
For each action the total entity
confidence,
, is calculated from the
confidences of each entity in the action,
, as:
.
The confidence of each verb
in the action is
now calculated from the total entity confidence of
the action and the verb confidence
|
∙
.
The goodness of a verb in an action is defined as
follows:
∙
.
In a certain time window we take for each verb in
a set of overlapping actions
, for a single agent
the maximum goodness:
,
max
and report the verbs with the highest goodness
larger than for all actions in the time window
,,
max
,
if
,
The advantages of this simple model are that there
are only two intuitive settings that determine the
general output namely and .
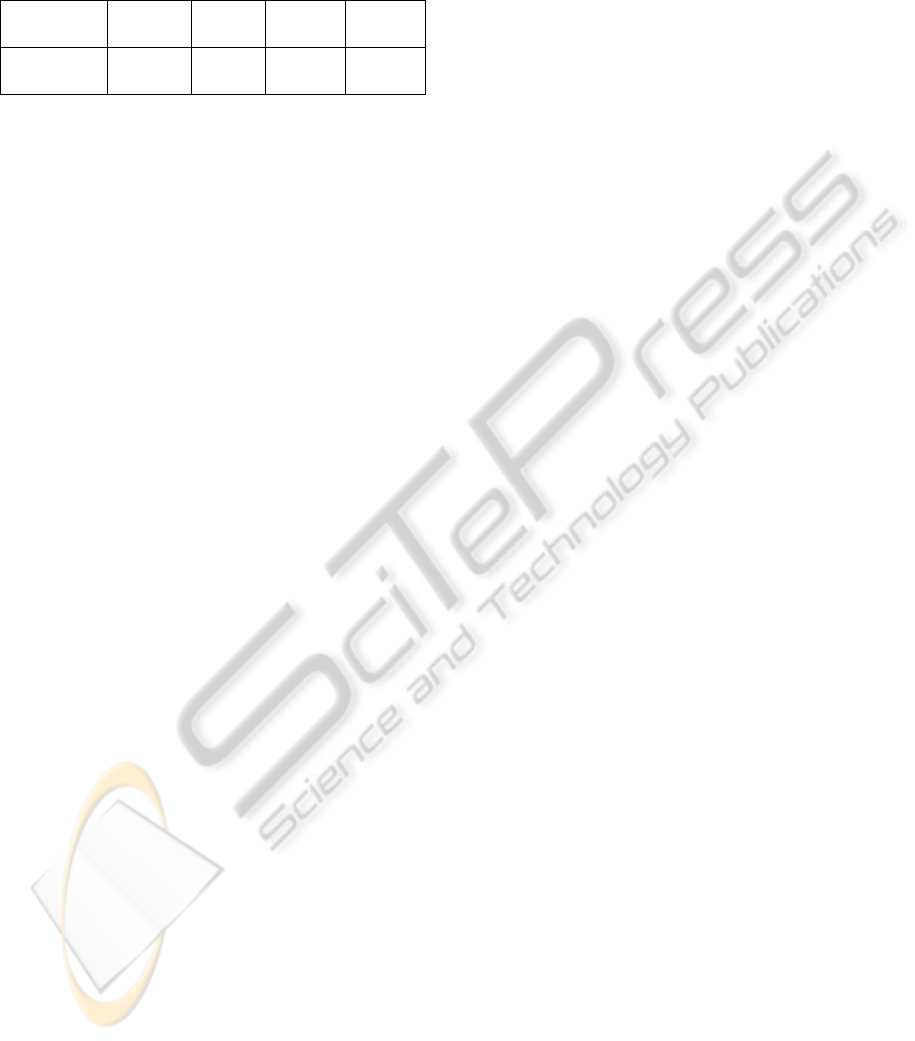
9 SEARCH ENGINE
A GUI enables interactive exploration of tracks,
entities and actions in a video, that visualizes their
temporal extent as segments in a segment viewer
and their spatial extents as bounding boxes in a
video player. When a segment is selected in the
explorer (see
Figure 1) the player displays the related
frame (within the segment) and bounding boxes of
the related tracks (yellow), entities (green), and
actions (red). And when a bounding box is selected
in the player, the explorer automatically jumps and
zooms into the related segment
9.1 Person who is Digging
Figure 1 shows a screenshot with a video of some
person digging. As can be seen the search engine has
detected the actions dig n and stop. The segment
viewer shows the temporal extents of the detected
person (i.e. agent 1), its actions (i.e. action 2) and
relevant stories (i.e. stories 1, 2 and 3). It also shows
the detected verbs (in light red) and related event
properties (in light green). One can see that dig and
stop are in the list, but also a number of other verbs.
The reason why these verbs are not reported in the
description of the stories (depicted in Figure 1) is
because they had a low confidence or relevance.
Also depicted are the related event properties
that support the detected verbs. For example one can
see that in the beginning of the action the person was
not moving and then started moving slowly in a
vertical and downward direction, which is typical for
a dig action.
9.2 People who Meet each other
Figure 2 shows a screenshot with a video of a person
approaching another person. As can be seen the
search engine has detected the actions correctly (e.g.
arrives, goes, approaches, stops). It also detected a
“pass”, which is incorrect. We can see the actions
and related entities for the depicted scene. It also
depicts an interaction (purple) segment that denotes
the temporal extent of the two persons (i.e. agent 8
and entity 5) being involved in the interaction.
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
416
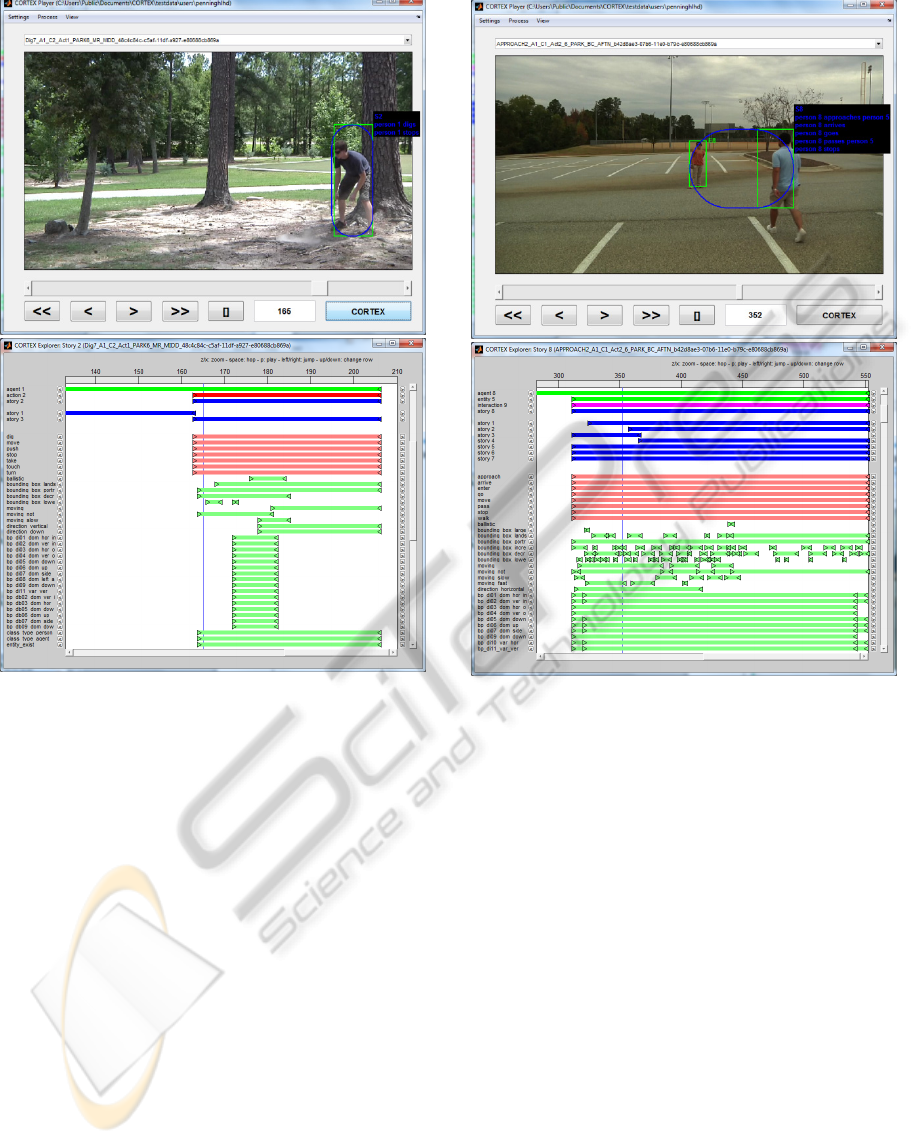
Figure 1: A person digging.
As can be seen in the segment viewer, the
interaction has been reported as story in the system
response for which several verbs have been
recognized, but not all have been reported (due to
filtering on relevance as described in section 8). An
explanation for the reporting of “pass” is noise in the
track detection which has been propagated to the
event properties. As can be seen in the explorer, the
property bounding_box_landscape is active during
the second part of the interaction, although both
persons are standing up. Because the bounding box
of one person is sometimes detected as landscape,
which easily overlaps the portrait bounding box of
the other person, the action has been detected as a
“pass”.
9.3 Two Persons who Exchange an
Item
Figure 3 shows a screenshot with a video of two
persons exchanging something. As can be seen the
search engine has detected the actions correctly (e.g.
Figure 2: One person approaching another.
has, gives and exchanges). But it also reported “fall”
and “attach”. The latter can be easily explained
because of the small difference in moving parts for
giving an item to someone or attaching an item to
someone. But to explain the detection of “fall” we
need to look at the segment viewer, where we can
see the actions and related entities for the depicted
scene. It also depicts an interaction (purple) segment
that denotes the temporal extent of the two persons
(i.e. agent 1 and entity 4) being involved in the
exchange.
In the segment viewer one can see that more
incorrect verbs have been recognized that all have to
do with vertical moving bounding boxes (e.g.
bounce, drop, lift, raise). This typically the result of
noise in the detected tracks and related STIP features
(depicted in the explorer as many active STIP
related event properties; “bp_diN_dom_...”). Due to
the interplay of the recognizer and descriptor, only
the verbs that have enough supporting evidence from
the detected event properties are selected to be
reported by the descriptor in the system response.
ASearchEngineforRetrievalandInspectionofEventswith48HumanActionsinRealisticVideos
417

Figure 3: Two persons exchanging an item.
10 CONCLUSIONS
We have showed that events related to 48 human
behaviors can be successfully retrieved and
inspected by usage of the proposed search engine.
The search engine combines algorithms for early
visual processing, spatio-temporal segmentation of
the initiative-taking person and other related persons
and items, extraction of data-driven and semantic
action features, action detection, and description of
the detected actions including the subject and object.
Several examples of retrieved events in realistic
videos demonstrate the power of the combined
algorithms. We have shown successful searches for
a rare event, an event that involves a group of
persons, and a detailed action of two persons that
exchange something. The search engine enables both
the retrieval and inspection of human action related
events.
ACKNOWLEDGEMENTS
This work is supported by DARPA (Mind’s Eye
program). The content of the information does not
necessarily reflect the position or the policy of the
US Government, and no official endorsement should
be inferred.
REFERENCES
Bouma, H., Hanckmann, P., Marck, J-W., de Penning, L.,
den Hollander, R., ten Hove, J-M., van den Broek, S.
P., Schutte, K., Burghouts, G. J., 2012. Automatic
human action recognition in a scene from visual
inputs, SPIE.
Breiman, L., 2001, Random forests, Machine Learning.
Burghouts, G. J., Schutte, K., 2012, Correlations between
48 human actions improve their detection, ICPR.
Chang, C.-C., Lin, C.-J., 2001, LIBSVM: a library for
support vector machines, software available at http://
www.csie.ntu.edu.tw/~cjlin/libsvm.
Felzenszwalb, P., Girshick, R., McAllester, D., Ramanan,
D., 2010, Object detection with discriminatively
trained part based models, PAMI.
Hanckmann, P., Schutte, K., Burghouts, G. J., 2012,
Automated Textual Descriptions for a Wide Range of
Video Events with 48 Human Actions, ECCV.
Laptev, I., 2005, On Space-Time Interest Points, IJCV.
Moosmann, F., Triggs, B., Jurie, F., 2006, Randomized
Clustering Forests for Building Fast and
Discriminative Visual Vocabularies, NIPS.
Ramanan, D., 2006, Learning to parse images of
articulated bodies”, NIPS.
van de Sande, K. E. A., Gevers, T., Snoek, C. G. M., 2010,
Evaluating Color Descriptors for Object and Scene
Recognition, PAMI.
Stauffer, C., Grimson, W., 1999, Adaptive background
mixture models for real-time tracking, CVPR.
Withagen, P. J., Schutte, K., Groen, F. C. A., 2004,
Probabilistic classification between foreground objects
and background, ICPR
Zhang, J., Marszalek, M., Lazebnik, S., Schmid, C., 2007,
Local features and kernels for classification of texture
and object categories: A comprehensive study, IJCV.
Stanford Parser: http://nlp.stanford.edu/software/
lexparser.shtml
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
418
