
Efficient Bag of Scenes Analysis for Image Categorization
S
´
ebastien Paris
1
, Xanadu Halkias
2
and Herv
´
e Glotin
2,3
1
DYNI team, LSIS CNRS UMR 7296, Aix-Marseille University, Aix-en-Provence, France
2
DYNI team, LSIS CNRS UMR 7296, Universit
´
e Sud Toulon-Var, Toulon, France
3
Institut Universitaire de France, Paris, France
Keywords:
Image Categorization, Scenes Categorization, Fine-grained Visual Categorization, Non-parametric Local
Patterns, Multi-scale LBP/LTP, Dictionary Learning, Sparse Coding, LASSO, Max-pooling, SPM, Linear
SVM.
Abstract:
In this paper, we address the general problem of image/object categorization with a novel approach referred to
as Bag-of-Scenes (BoS).Our approach is efficient for low semantic applications such as texture classification
as well as for higher semantic tasks such as natural scenes recognition or fine-grained visual categorization
(FGVC). It is based on the widely used combination of i) Sparse coding (Sc), ii) Max-pooling and iii) Spa-
tial Pyramid Matching (SPM) techniques applied to histograms of multi-scale Local Binary/Ternary Patterns
(LBP/LTP) and its improved variants. This approach can be considered as a two-layer hierarchical architec-
ture: the first layer encodes the local spatial patch structure via histograms of LBP/LTP while the second en-
codes the relationships between pre-analyzed LBP/LTP-scenes/objects. Our method outperforms SIFT-based
approaches using Sc techniques and can be trained efficiently with a simple linear SVM.
1 INTRODUCTION
Image categorization
1
consists of assigning a unique
label with a generally high-level semantic value to
an image while FGVC refers to the task of classify-
ing objects that belong to the same basic-level class.
Both have long been a challenging problem area in
computer vision, biomonitoring and robotics and can
mainly be viewed as belonging to the broader super-
vised classification framework. In scene categoriza-
tion, the difficulty of the task can be partly explained
by the high-dimensional input space of the images as
well as the high-level semantic visual concepts that
lead to large intra-class variation. For object recog-
nition more specifically, the small aspect ratio (ob-
ject’size vs image’size) can induce a high level of un-
informative background pixels. A preliminary detec-
tion procedure is required to ”home-in” the object in
a Region of Interest (ROI) (Bosch et al., 2007; Larios
et al., 2011).
The direct framework (see Fig.1) in vision sys-
tems consists of extracting directly from the images
meaningful features (using shape/texture/similarity/
color information) in order to achieve the maximum
1
Granded by COGNILEGO ANR 2010-CORD-013 and
PEPS RUPTURE Scale Swarm Vision
generalization capacity during the classification stage.
Examples of such popular features in computer vision
and human cognition inspired models include GIST
(Oliva and Torralba, 2001), HOG (Dalal and Triggs,
2005), Self-Similarity (Deselaers and Ferrari, 2010)
and WLD (Chen et al., 2010).
Widely used in face detection (Fr
¨
oba and Ernst,
2004; Wu et al., 2011), face recognition (Marcel et al.,
2007; Zhang et al., 2007), texture classification (Sa-
dat et al., 2011; Bianconi et al., 2012) and scene cat-
egorization (Wu and Rehg, 2008; Gao et al., 2010;
Paris and Glotin, 2010; Zhang et al., 2010), Local
Binary Pattern (LBP) (Ojala et al., 2002) and re-
cent derivatives such as Local Ternary Pattern (LTP)
(Zheng et al., 2010), Gabor-LBP (Zhang et al., 2009;
Lee et al., 2010), Local Gradient Pattern (LGP) (Jun
and Kim, 2012) or Local Quantized Pattern (LQP)
(Hussain and Triggs, 2012) are efficient local micro-
patterns that define competitive features achieving
state-of-the-art performances.
LBP can be considered as a non-parametric local
visual micro-pattern texture, encoding mainly con-
tours and differential excitation information of the 8
neighbors surrounding a central pixel (Heikkil
¨
a et al.,
2006; Huang et al., 2011). This process represents
a contractive mapping from R
9
7→ N
2
8
⊂ N
+
for
335
Paris S., Halkias X. and Glotin H. (2013).
Efficient Bag of Scenes Analysis for Image Categorization.
In Proceedings of the 2nd International Conference on Pattern Recognition Applications and Methods, pages 335-344
DOI: 10.5220/0004198303350344
Copyright
c
SciTePress

each local patch p(x
x
x) centered in x
x
x ((Bianconi and
Fern
´
andez, 2011) provide a theoretical study of LBP).
The total number of different LBPs is relatively small
and by construction is finite: from 256 up to 512 dif-
ferent patterns (if improved LBP is used).
LTP (Tan and Triggs, 2010) have been extended
from LBP as a parametric approximation of a ternary
pattern. Instead of mapping R
9
7→ N
3
8
⊂ N
+
, they
proposed to split the ternary pattern into two binary
patterns and concatenating the two associated his-
tograms. In (Hussain and Triggs, 2012), they general-
ize local pattern with LQP by both increasing neigh-
borhood range, number of neighbors and pattern car-
dinality leading to map R
9
7→ N
b
N
⊂ N
+
.
Histograms of LBP (HLBP) (respectively HLTP),
which count the occurrence of each LBP (respectively
LTP) in the scene, can easily capture general struc-
tures in the visual scene by integrating information
in a ROI, while being less sensitive to local high fre-
quency details. This property is important when the
desire is to generalize visual concepts. As depicted in
this work, it is advantageous to extend this analysis
for several sizes of local ROIs using a spatial pyramid
denoted by Λ
Λ
Λ.
Recently, the alternative scheme of Bag-of-
Features (BoF) has been employed in several com-
puter vision tasks with wide success. It offers a deeper
extraction of visual concepts and improves accuracy
of computer vision systems. BoF image representa-
tion (Willamowski et al., 2004) and its SPM exten-
sion (Lazebnik et al., 2006) share the same idea as
HLBP: counting the presence (or combination) of vi-
sual patterns in the scene. BoF contains at least three
modules prior to the classification stage: (i) region se-
lection for patch extraction; (ii) codebook/dictionary
generation and feature quantization; (iii) frequency
histogram based image representation with SPM. In
general, SIFT/HOG patches (Lowe, 2009; Dalal and
Triggs, 2005) are employed in the first module. These
visual descriptors are then encoded, in an unsuper-
vised manner, into a moderate sized dictionary using
Vector Quantization (VQ) (Lazebnik et al., 2006) or
sparse coding (Yang et al., 2009b). In (Wu and Rehg,
2009), Wu and al were first to introduce LBP (via
CENTRIST) into BoF framework coupled with his-
togram intersection kernel (HIK).
At least two disadvantages can be addressed
against the BoF framework, mainly concerning the
second stage. Firstly, and more specifically for
FGVC, the trained dictionaries don’t have enough
representative basis vectors for some (rare and de-
tailed) local patches that are crucial for discrimina-
tivity. Secondly, during quantification/encoding a lot
of important information can be lost (Boiman et al.,
2008). For these reasons, dictionary-free approaches
have been recently introduced. In (Yao and Bradski,
2012), they performed an efficient template matching
coupled with a bagging classification procedure. In
(Bo et al., 2010; Bo et al., 2011a), they bypass BoF
with efficient but computationally expensive hierar-
chical kernel descriptors. In (Larios et al., 2011; Choi
et al., 2012), they proposed patche’s supervised learn-
ing (respectively supervised projection) with random
forest (respectively with PLS).
In order to improve the encoding scheme, it has
been shown that localized soft-assignement (Avila
et al., 2011), local-constrained linear coding (LLC)
(Oliveira et al., 2012), Fisher vectors (FV) (Perronnin
et al., ; Krapac et al., 2011), orthogonal matching pur-
suit (OMP) (Bo et al., 2011b) or Sparse coding (Sc)
(Yang et al., 2009b; Gao et al., 2010) can easily be
plugged into the BoF framework as a replacement for
VQ. Moreover, pooling techniques coupled with SPM
(Lazebnik et al., 2006) can be effectively used as a re-
placement for the global histogram based image rep-
resentation.
Our contributions in this paper are two-fold. We
first re-introduce two multi-scale variants of the LBP
operators and extend two novel multi-scale variants
of the LTP operators (Tan and Triggs, 2010). Sec-
ondly, we propose to plug HLBP/HLTP into the Sc
framework as a second analyzing layer and call this
procedure Bag-of-Scenes (BoS). This new approach
is efficient as well as for scene categorization, ob-
ject recognition or FGVC. The novel features can
be trained efficiently with simple large-scale linear
SVM solver such as Pegasos (Shalev-Shwartz et al.,
2007) or LIBLINEAR (Hsieh et al., 2008). BoS can be
seen as a two layer Hierarchical BoF analysis: a first
fast contractive low-dimension manifold encoder via
HLBP/HLTP and a second inflating high-dimension
encoder via Sc.
Figure 1: Comparison of the different frameworks. Left:
direct framework, Middle: BoF/Sc framework, Right: Our
proposed BoS/Sc framework.
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
336

2 HISTOGRAM OF
MULTI-SCALE LOCAL
PATTERNS
For an image/patch I
I
I (n
y
× n
x
), we present two exist-
ing multi-scale versions of the LBP operator, denoted
by the B operator and for its improved variant by the
IB operator. We also introduce two novel multi-scale
versions of the LTP, denoted by the T operator and for
its improved variant by the IT operator.
2.1 Multi-scale LBP/ILBP
Basically, operator B encodes the relationship be-
tween a central block of (s × s) pixels located in
(y
c
,x
c
) with its 8 neighboring blocks (Liao et al.,
2007), whereas operator IB adds a ninth bit encod-
ing a term homogeneous to the differential excitation
(see left Fig. 2). Both can be considered as a non-
parametric local texture encoder for scale s. In order
to capture information at different scales, the range
analysis s ∈ S , is typically set at S = [1,2,3,4] for this
paper, where S = Card(S ). These two micro-codes
are defined as follows
2
:
B(y
c
,x
c
,s) =
i=7
∑
i=0
2
i
1
{A
i
≥A
c
}
IB(y
c
,x
c
,s) = B(y
c
,x
c
,s) + 2
8
1
7
∑
i=0
A
i
≥8Ac
.
(1)
For ∀(y
c
,x
c
) ∈ R
R
R ⊂ I
I
I, B(y
c
,x
c
,s) ∈ N
2
8
and
IB(y
c
,x
c
,s) ∈ N
2
9
respectively.
Figure 2: Left: I
I
I and B(y
c
,x
c
,4) overlaid. Right: corre-
sponding image integral I
I
II
I
I and the central block A
c
. A
c
can
be efficiently computed with the 4 corner points.
2.2 Multi-scale LTP/ILTP
We introduce the multi-scale version of LTP and its
improved variant. The idea behind LTP is to extend
the LBP for b = 3 with the help of a single thresh-
old parameter t ∈ N
2
8
. With the same neighborhood
2
1
{x}
= 1 if event x is true, 0 otherwise.
configuration with N = 8 (see left Fig. 2), a direct
extension would conduct to have 3
8
= 6561 different
patterns. In (Tan and Triggs, 2010), they proposed to
break the high dimensionality of the code by splitting
the ternary code into two binary operators T
p
and T
n
such as:
T
p
(y
c
,x
c
,s;t) =
i=7
∑
i=0
2
i
1
{
1
s
2
(A
i
−A
c
)≥t}
T
n
(y
c
,x
c
,s;t) =
i=7
∑
i=0
2
i
1
{
1
s
2
(A
i
−A
c
)≤−t}
.
(2)
The improved multi-scale LTP operators (denoted IT
p
and IT
n
) are derived similarly from MSLBP by:
IT
p
(y
c
,x
c
,s;t) = T
p
(y
c
,x
c
,s;t) + 2
8
1
1
s
2
7
∑
i=0
A
i
−8Ac
≥t
IT
n
(y
c
,x
c
,s;t) = T
n
(y
c
,x
c
,s;t) + 2
8
1
1
s
2
7
∑
i=0
A
i
−8Ac
≤−t
.
(3)
Now, for ∀(y
c
,x
c
) ∈ R
R
R ⊂ I
I
I, both codes
{T
p
(y
c
,x
c
,s;t),T
n
(y
c
,x
c
,s;t)} ∈ N
2
8
while the im-
proved version {IT
p
(y
c
,x
c
,s;t),IT
n
(y
c
,x
c
,s;t)} ∈ N
2
9
respectively.
2.3 Integral Image for Fast Areas
Computation
The different areas {A
i
} and A
c
in eq.(1), eq.(2) and
eq.(3) can be computed efficiently using the image in-
tegral technique (Viola and Jones, 2004). Let’s define
I
I
II
I
I the image integral of I
I
I by:
I
I
II
I
I(y, x) ,
y
0
<y
∑
y
0
=0
x
0
<x
∑
x
0
=0
I
I
I(y
0
,x
0
). (4)
Any square area A(y,x,s) ∈ R
R
R (see right Fig. 2) with
upper-left corner located in (y,x) and side length s is
the addition of only 4 values:
A(y, x, s) = I
I
II
I
I(y + s,x + s) + I
I
II
I
I(y, x)
−(I
I
II
I
I(y, x + s) + I
I
II
I
I(y + s,x)).
(5)
2.4 Histogram of Local Patterns
For all previously defined operators op ∈
{B,IB,T
p
,T
n
,IT
n
,IT
p
}, efficient features are ob-
tained by counting occurrences of the j
th
visual
LBP/LTP at scale s in a ROI R
R
R ⊆ I
I
I:
z
op
(R
R
R, j,s) =
∑
(x
c
,y
c
)∈R
R
R
1
{op(y
c
,x
c
,s)= j}
,
where j = 0,...,b − 1 is the j
th
bin of the his-
togram and b = {256,512,256,256,512,512} for
op ∈ {B, IB, T
p
,T
n
,IT
n
,IT
p
} respectively.
EfficientBagofScenesAnalysisforImageCategorization
337

Full histogram of LBP and variant its ILBP, de-
noted z
z
z
B
, z
z
z
IB
, are computed by:
z
z
z
op
(R
R
R,s) , [z
op
(R
R
R,0,s),...,z
op
(R
R
R,b − 1,s)], (6)
with a total size for patches d = b = {256, 512} re-
spectively.
For LTP, full histograms, denoted z
z
z
T
, z
z
z
IT
are de-
fined by:
z
z
z
op
(R
R
R,s) ,
z
op
p
(R
R
R,0,s),...,z
op
p
(R
R
R,b − 1,s),...,
,...,z
op
n
(R
R
R,0,s),...,z
op
n
(R
R
R,b − 1,s)],
(7)
with a total size for patches d = 2.b = {512, 1024}
respectively.
To end the patch extraction stage, regardless the
type of histogram of local patterns used, a `
2
clamped
normalization procedure (`
2
normalization followed
by a saturation with the clamp value and again a
`
2
normalization) is performed on each histogram
(clamp value = 0.2).
3 SPARSE CODING ON PATCHES
OF MULTI-SCALE LOCAL
PATTERNS
Following the same framework as in (Lazebnik et al.,
2006; Yang et al., 2009b; Boureau et al., 2010a; Chat-
field et al., 2011), we show here that the traditional
BoF approach can be advantageously replaced by i)
Sc, ii) max-pooling technique and iii) a simple linear
SVM as a classifier since the produced features are
mostly linearly separable (see Fig. 1 for synopsis).
3.1 Patches of HB/HIB/HT/HIT
Here, we replace the collection of usual SIFT patches
densely sampled on a grid by our HB/HIB/HT/HIT
patches z
z
z seen previously. Specifically, F patches of
size (m × m) associated with ROI’s {O
O
O
k
} (possibly
overlapping) are extracted for k = 0,...,F − 1 and
∀s ∈ S (see Fig. 3). For a faster computation for each
scale s, the integral image I
I
II
I
I is first computed from I
I
I.
For a complete dataset containing N images and
∀s ∈ S, we obtain a collection of P = TS patches
Z
Z
Z , {z
z
z
i
}, i = 1, . . . , P, where T = NF. We define,
the subset of patches z
z
z
i
at scale s by Z
Z
Z(s) ⊆ Z
Z
Z with T
elements.
3.2 Sparse Coding Overview
In order to obtain highly discriminative visual fea-
tures, a common procedure consists of encoding each
patch z
z
z
i
∈ Z
Z
Z(s) at scale s through an unsupervised
trained dictionary D
D
D , [d
d
d
1
,. .. , d
d
d
K
] ∈ R
b×K
, where K
denotes the number of dictionary elements, and its
corresponding weight vector c
c
c
i
∈ R
K
. In the BoF
framework, the vector c
c
c
i
is assumed to have only one
non-zero element:
argmin
D
D
D,C
C
C
T
∑
i=1
kz
z
z
i
− D
D
Dc
c
c
i
k
2
2
s.t. kc
c
c
i
k
`
0
= 1, (8)
where C
C
C , [c
c
c
1
,. .. , c
c
c
K
] and k • k
`
0
defines the pseudo
zero-norm, where here only one element of c
c
c
i
is non-
zero. In eq. (8), under these constraints, (D
D
D,C
C
C) can be
optimized jointly by a Kmeans algorithm for example.
In the Sc approach, in order to i) reduce the quan-
tization error and ii) to have a more accurate represen-
tation of the patches, each vector z
z
z
i
is now expressed
as a linear combination of a few vectors of the dic-
tionary D
D
D and not only by a single one. Imposing
the exact number of non-zero elements in c
c
c
i
(spar-
sity level) involves a non-convex optimization (Mairal
et al., 2009). In general, it is preferred to relax this
constraint and to use instead an `
1
penalty which also
involves sparsity. The problem is then reformulated
using the following equation:
argmin
D
D
D,C
C
C
T
∑
i=1
kz
z
z
i
− D
D
Dc
c
c
i
k
2
2
+ βkc
c
c
i
k
`
1
s.t. kc
c
c
i
k
`
1
= 1,
(9)
where the sparsity in controlled by the parameter β.
The last equation is not jointly convex in (D
D
D,C
C
C) and
a common procedure consists of optimizing alterna-
tively D
D
D given C
C
C by a block coordinate descent and
then C
C
C given D
D
D by a LASSO procedure (Tibshirani,
1996). At the end of the process, for each scale s ∈ S ,
a trained dictionary
b
D
D
D(s) is obtained.
3.3 Spatial Pyramidal Matching
and Max Pooling
For an image I
I
I and given a trained dictionary
b
D
D
D(s)
for a type of code at scale s, F sparse vectors {c
c
c
k
(s)}
are computed by a LASSO algorithm. The final
efficient descriptor x
x
x(s) ,
x
0
(s),. . . , x
K−1
(s)
∈ R
K
is obtained by the following max-pooling procedure
(Yang et al., 2009b; Boureau et al., 2010b):
x
j
(s) , max
k|O
O
O
k
∈R
R
R
(|c
j
k
(s)|), j = 0,...,K − 1, (10)
where each element of x
x
x(s) represents the max-
response of the absolute value of sparse codes belong-
ing to the ROI R
R
R. In order to improve accuracy, a spa-
tial pyramidal matching procedure helps to perform
a more robust local analysis. The spatial pyramid
Λ
Λ
Λ has V =
L−1
∑
l=0
V
l
ROIs {R
R
R
l,v
} with l = 0, . . . , L − 1,
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
338

Figure 3: Example Left: ROI’s {O
O
O
k
}, k = 0, . . ., F −1 of extracted patches used to compute HB. Right: associated normalized
histograms {z
z
z
B
(O
O
O
k
)}, one per column.
v = 0, . . . ,V
l
− 1 (see Fig. 4 for an example). The
quantity z
z
z
j
l,v
(s) for each ROI R
R
R
l,v
is computed by:
x
j
l,v
(s) , max
k|O
O
O
k
∈R
R
R
l,v
(|c
j
k
(s)|), j = 0,...,K − 1. (11)
We reinforce our model by an important normal-
ization step, improving considerably accuracy, con-
sists of the `
2
normalization of all vectors {x
x
x
l,v
(s)},
v = 0,. . . ,V
l
− 1,s ∈ S , i.e. belonging to the same
pyramidal layer l. This step is also very important
and often hidden in the existing literature.
The final descriptor x
x
x(Λ
Λ
Λ) will be defined by the
weighted concatenation of all the x
x
x
l,v
(s) vectors, i.e.
x
x
x(Λ
Λ
Λ) , {λ
l
x
x
x
l,v
(s)}, l = 0,. . . , L − 1, v = 0, . . . ,V
l
− 1
and ∀s ∈ S . The total size of the feature vector x
x
x(Λ
Λ
Λ)
is d = K.V.S, where typically in our simulations, we
fixed K = {1024, 2048}, V = {10,21, 26} and S = 4.
A final `
2
clamped normalization step is performed on
the full vector x
x
x(Λ
Λ
Λ).
4 LINEAR SVM FOR
SUPERVISED TRAINING
Let’s assume available a training data set
{x
x
x
i
(Λ
Λ
Λ),y
i
}
N
i=1
, where x
x
x
i
(Λ
Λ
Λ) ∈ R
d
is one of four
previously defined features and y
i
∈ {1, . . . , M},
where M is the number of classes. As in (Yang
et al., 2009b; Boureau et al., 2010a), we will use a
simple large-scale linear SVM such as LIBLINEAR
(Hsieh et al., 2008) with the 1-vs-all multi-class
strategy. The associated binary unconstrained convex
optimization problem to solve is:
min
w
w
w
(
1
2
w
w
w
T
w
w
w +C
N
∑
i=1
max
1 − y
i
w
w
w
T
x
x
x
i
,0
2
)
, (12)
where the parameter C controls the generalization er-
ror and is tuned on a specific validation set. LIBLIN-
EAR converges to a solution linearly in O(dN) com-
pared to O(dN
2
sv
) in the worst case for classic SVM
where N
sv
≤ N defines the number of support vectors.
5 EXPERIMENTAL RESULTS
We test our BoS framework on Scene-15 (Lazeb-
nik et al., 2006), UIUC-Sport (Li, 2007), Caltech101
(Fei-Fei et al., 2007), USCD-Birds200 (Welinder
et al., 2010) and Stanford-Dogs120 datasets(Khosla
et al., 2011a).
We define our SPM matrix Λ
Λ
Λ with L levels such
as Λ
Λ
Λ , [r
r
r
y
,r
r
r
x
,d
d
d
y
,d
d
d
x
,λ
λ
λ]. Λ
Λ
Λ is matrix of size (L × 5).
For a level l ∈ {0, . . . , L − 1}, the image I
I
I, with size
(n
y
× n
x
), is divided into potentially overlapping sub-
windows R
R
R
l,v
of size (h
l
×w
l
). All these windows are
sharing the same associated weight λ
l
. In our imple-
mentation, h
l
, bn
y
.r
y,l
c and w
l
, bn
x
.r
x,l
c where r
y,l
,
r
x,l
and λ
l
are the l
th
element of vectors r
r
r
y
, r
r
r
x
and λ
λ
λ
respectively. Sub-window shifts in x − y axis are de-
fined by integers δ
y,l
, bn
y
.d
y,l
c and δ
x,l
, bn
x
.d
x,l
c
where d
y,l
and d
x,l
are elements of d
d
d
y
and d
d
d
x
respec-
tively. Overlapping can be performed if d
y,l
≤ r
y,l
and/or d
x,l
≤ r
x,l
. The total number of sub-windows is
equal to
V =
L−1
∑
l=0
V
l
=
L−1
∑
l=0
b
(1 − r
y,l
)
d
y,l
+ 1c.b
(1 − r
x,l
)
d
x,l
+ 1c.
(13)
For all dataset used, we used SIFT patches
with block size (16 × 16) pixels and (26 × 26)
pixels for ours HB/HIB/HT/HIT respectively. For
SIFT/HB/HIB/HT/HIT, we extract F = 35.35 = 1225
patches per scale. For both dictionary learning and
sparse codes computation, we fix β = 0.2 and N
ite
=
50 iterations to train dictionaries. We uses our own
modified version of the SPAMS toolbox (Mairal et al.,
2009). Finally, we performed 10 cross-validation to
EfficientBagofScenesAnalysisforImageCategorization
339
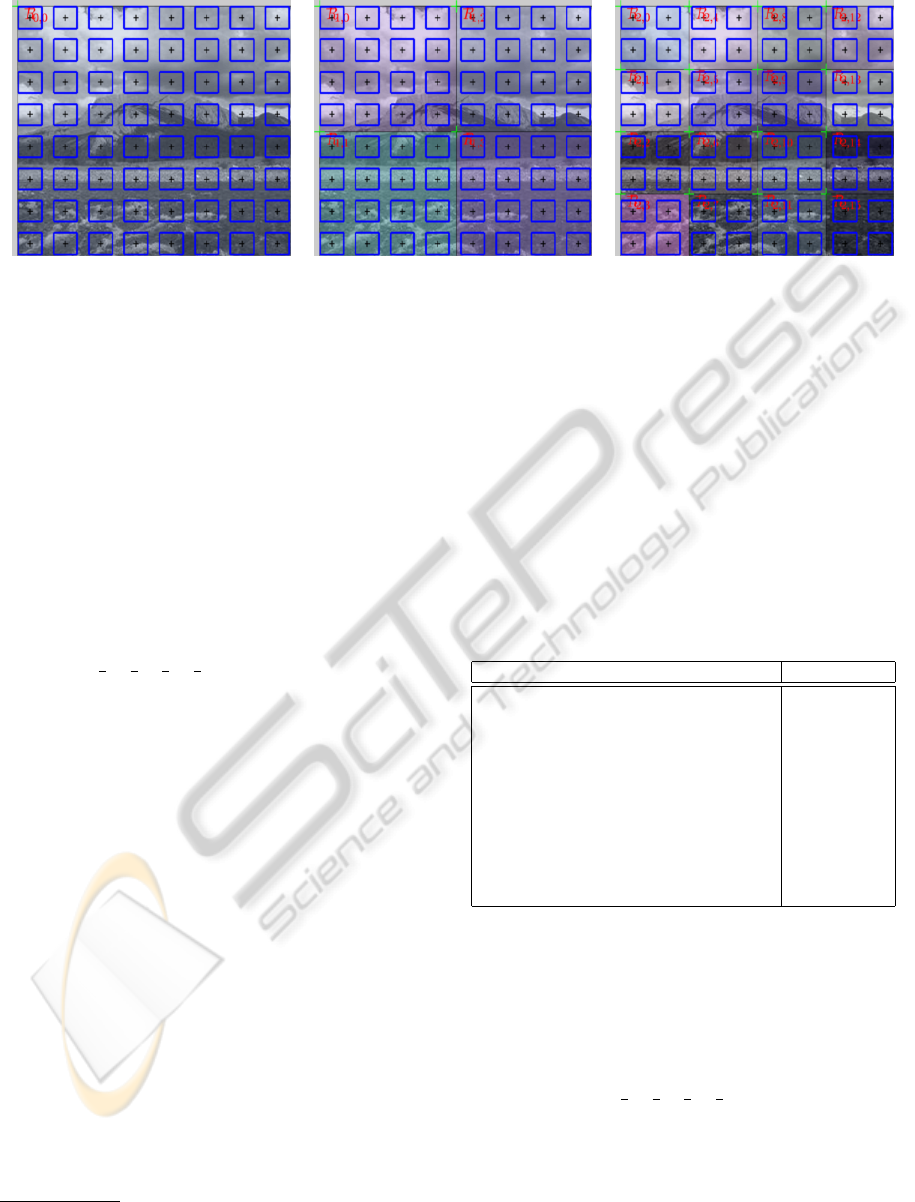
Figure 4: Example of SPM Λ
Λ
Λ with L = 3, F = 8 × 8 and V = 1 + 4 + 16. The F ROIs {O
O
O
k
}, k = 0,. . . , F − 1 associated with
each patch z
z
z
k
are represented by blue squares. Sparse codes c
c
c
k
are computed for each ROI O
O
O
k
. Upper-left corner of each max-
pooling window R
R
R
l,v
taking {64, 16, 4} c
c
c
k
is indicated with a green cross. Left: R
R
R
0,0
= I
I
I for l = 0. Middle: {R
R
R
1,v
}, v = 0, . .. , 3
for l = 1. Right {R
R
R
2,v
}, v = 0,. .. , 15 for l = 2.
compute the average overall accuracy and its standard
deviation using the LIBLINEAR solver and fixing pa-
rameter C = 15.
5.1 Scene-15 Dataset
The Scene-15 dataset contains a total of 4485 im-
ages in grey color assigned to M = 15 categories.
The number of images in each category is ranging
from 200 to 400. 100 images per class are used to
train, the rest for testing. For this dataset, we de-
fine Λ
Λ
Λ =
1 1 1 1 1
1
3
1
3
1
6
1
6
1
, i.e. a two layer spa-
tial pyramid dividing image in third and an overlap-
ping of 50% representing a total of 1 + 25 = 26 ROIs.
For HT and HIT patches, we fix t = 1. We select
15000 patches per class (a total of 225000 patches)
to train dictionaries via Sc. In Fig. 5, we plot ac-
curacy versus the number of words K in the dictio-
nary training. With our particular choice of Λ
Λ
Λ and
for one unique scale, we retrieved results comparable
to (Yang et al., 2009b), i.e. 80.28% vs. 81.24% for
our implementation. Whatever, the number of scale
used and the type of patch, our BoS framework out-
performs the SIFT-ScSPM approach. In Tab. 1, we
compare our results with the state-of-the-art for this
dataset (with S = 4 scales). The best performance is
actually obtained with the SIFT-LScSPM involving
a more sophisticated dictionary training through the
Laplacian sparse coding. The latter is very time and
memory consuming
3
but is improving results with
normal SIFT patches from 80.28% ± 0.93 with sim-
ple Sc to 89.75% ± 0.5 with LSc. The second best
result is obtained with spatial FV following by the
kernel descriptors. For FV, they reduced SIFT to 64
3
LSc requiers to store sparse codes of the template set,
i.e, a sparse matrix (K × N
template
).
dimension (total size equal to K(1 + 2.d) = 12800)
and used a multi-class logistic regression. It is also
worth noting that KDES-EKM uses a concatenation
of 3 descriptors coupled with an efficient feature map-
ping (KDES-A+LSVM got 81.9% ± 0.60 for a fair
comparison). However, our results with a single HIT
patch and a simple linear SVM are very close. More,
if FV or LSc would be used, one can expect better
results.
Table 1: Recognition rate (and standard deviation) for
Scene-15 dataset.
Algorithms Accuracy ± Std
SIFT-ScSPM (K = 1024) (Yang et al., 2009b) 80.28% ± 0.93
SIFT-MidLevel (K = 2048) (Boureau et al., 2010a) 84.20% ± 0.30
SIFT-LScSPM (K = 1024) (Gao et al., 2010) 89.75% ± 0.50
KDES-EKM (K = 1000) (Bo et al., 2010) 86.70%
PCASIFT-SFV (K = 100) (Krapac et al., 2011) 88.20%
SIFT-DITC (K = 1000) (Elfiky et al., 2012) 85.4%
SIFT-ScSPM (K = 1024, our implementation) 81.24% ± 0.73
HB-ScSPM (K = 2048, our work) 86.04%±0.36
HIB-ScSPM (K = 2048, our work) 86.45%±0.44
HT-ScSPM (K = 2048, our work) 86.24%±0.43
HIT-ScSPM (K = 2048, our work) 86.53% ± 0.37
5.2 UIUC-sport Dataset
The UIUC-sport dataset contains a total of 1579 im-
ages assigned to M = 8 categories. 60 images per
class are used to train, 70 for testing. For this dataset,
we define Λ
Λ
Λ =
1 1 1 1 1
1
2
1
2
1
4
1
4
1
representing a
total of 1 + 9 = 10 ROIs for SPM. Color (R,G,B) in-
formation channels are used, sampling patches and
training dictionaries on each of them. For HT and
HIT patches, we fix t = 5. We select 30000 patches
per class (a total of 240000 patches) to train dictio-
naries via Sc. In Fig. 6, we plot accuracy vs. K. No-
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
340

128 256 512 1024 2048
0.75
0.76
0.77
0.78
0.79
0.8
0.81
0.82
0.83
0.84
# K
Accuracy
Scenes15 with one scale
SIFT−ScSPM, σ=[1]
HB−ScSPM, s=[1]
HIB−ScSPM, s=[1]
HT−ScSPM, s=[1]
HIT−ScSPM, s=[1]
128 256 512 1024 2048
0.78
0.79
0.8
0.81
0.82
0.83
0.84
0.85
0.86
0.87
# K
Accuracy
Scenes15 with four scales
SIFT−ScSPM, σ=[0.5,0.65,0.8,1]
HB−ScSPM, s=[1,2,3,4]
HIB−ScSPM, s=[1,2,3,4]
HT−ScSPM, s=[1,2,3,4]
HIT−ScSPM, s=[1,2,3,4]
Figure 5: Results for Scenes 15. Left: one scale are used for all kind of patches. Right: four scales are used for all kind of
patches.
128 256 512 1024 2048
0.8
0.81
0.82
0.83
0.84
0.85
0.86
0.87
0.88
0.89
# K
Accuracy
UIUC−Sport with one scale
SIFT−ScSPM, σ=[1]
HB−ScSPM, s=[1]
HIB−ScSPM, s=[1]
HT−ScSPM, s=[1]
HIT−ScSPM, s=[1]
128 256 512 1024 2048
0.84
0.85
0.86
0.87
0.88
0.89
0.9
# K
Accuracy
UIUC−Sport with four scales
SIFT−ScSPM, σ=[0.5,0.65,0.8,1]
HB−ScSPM, s=[1,2,3,4]
HIB−ScSPM, s=[1,2,3,4]
HT−ScSPM, s=[1,2,3,4]
HIT−ScSPM, s=[1,2,3,4]
Figure 6: Results for UIUC-Sport. Left: one scale are used for all kind of patches. Right: four scales are used for all kind of
patches.
tice, that our implementation of SIFT-ScSPM outper-
forms results from (Yang et al., 2009b). Our choice of
Λ
Λ
Λ, color information used in training and our specific
normalization procedure may explain these improved
results. We can also notice, especially for a small dic-
tionary size, that our BoS framework is far superior to
SIFT-ScSPM. In Tab. 2, we compare our results with
the state-of-the-art (with S = 4 scales). To our best of
knowledge, our BoS framework, with HIT patch, ob-
tains the state-of-the-art performances with 89.85%
of overall accuracy.
5.3 Caltech101 Dataset
The Caltech101 dataset contains a total of 9144 im-
ages assigned to M = 102 categories. 30 images per
class are used to train, the rest for testing. For this
dataset, we define Λ
Λ
Λ =
1 1 1 1 1
1
3
1
3
1
6
1
6
1
. We ex-
tract 2000 HIT patches per class (a total of 204000
patches) for S = 4 scales to train dictionaries via Sc.
Table 2: Recognition rate (and standard deviation) for
UIUC-Sport dataset.
Algorithms Accuracy ± Std
SIFT-ScSPM (K = 1024) (Yang et al., 2009b) 82.70% ± 1.50
SIFT-LScSPM (K = 1024) (Gao et al., 2010) 85.30% ± 0.31
SIFT-HOMP (K = 2 × 1024) (Bo et al., 2011b) 85.70% ± 1.30
SIFT-ScSPM (K = 1024, our implementation) 87.98% ± 1.08
HB-ScSPM (K = 2048, our work) 87.42%±1.27
HIB-ScSPM (K = 2048, our work) 88.44%±1.25
HT-ScSPM (K = 2048, our work) 89.35%±1.42
HIT-ScSPM (K = 2048, our work) 89.85% ± 1.28
In Tab. 3, we compare our results with the state-of-
the-art. We separate methods using more sophisti-
cated approaches such as prior detection to localize
more precisely objects or using complex supervised
segmentation with methods classifying directly im-
ages. To the best of our knowledge, we have the
highest recognition rate (81.05%) for a unique feature
coupled with a simple linear SVM. With a medium
dictionary size (K = 1024), we are competitive with
sophisticated and time-consuming methods using su-
EfficientBagofScenesAnalysisforImageCategorization
341

Table 3: Recognition rate (and standard deviation) for Caltech101 dataset.
Methods Algorithms Accuracy ± Std (15 Train) Accuracy ± Std (30 Train)
Graph Matching + SVM. MLMRF+Curv. Expen. (Duchenne et al., 2011) 75.30% ± 0.70 80.30% ± 1.20
Detec. + Mult Non-Lin Ker. Multiway-SVM (Bosch et al., 2007) - 81.30%
Superv. Segm+Classif Subcat. Relevances (Todorovic and Ahuja, 2008) 72.00% 82.00%
Superv. Segm+Classif+Non-Lin Ker SvcSegm (Li et al., 2010) 72.60% 79.20%
Superv. Segm+Regress+Non-Lin Ker SvrSegm (Li et al., 2010) 74.70% 82.30%
Classif+MKL GS-MKL (Yang et al., 2009a) 73.20% 84.30%
Classif+Lin Ker SIFT-Multiway (K = 1024) (Boureau et al., 2011) - 77.30%± 0.60
Classif+Lin Ker SIFT-CDBN (K = 4096) (Sohn et al., 2011) 71.30% 77.80%
Classif+Non-Lin Ker SIFT-LaRank (K = 4096) (Oliveira et al., 2012) 73.09% ± 0.77 80.02% ± 0.36
Classif+Lin Ker HT-ScSPM (K = 1024, our work) 74.24% ± 0.69 81.05% ± 0.43
Classif+Lin Ker HT-ScSPM (K = 2048, our work) 73.92% ± 0.81 80.90% ± 0.38
Classif+Lin Ker HIT-ScSPM (K = 1024, our work) 73.23% ± 0.69 80.51% ± 0.46
Classif+Lin Ker HIT-ScSPM (K = 2048, our work) 72.54% ± 0.70 80.27% ± 0.44
pervised segmentation, graph matching or complex
MKL.
5.4 USCD-Birds200 Dataset
The USCD-Birds200 dataset is containing a total
of 6033 images assigned to M = 200 categories.
We crop all images with the provided bounding-box
ground-truth. 15 images per class are used to train,
the rest for testing. This dataset represents a challeng-
ing FGVC task, where categorization must exploits
details difference between species. We particularize
Λ
Λ
Λ =
1 1 1 1 1
1
3
1
3
1
6
1
6
1
. Color (R,G,B) informa-
tion channels are used, sampling patches and training
dictionaries on each of them. For the HIT patches, we
fix t = 5. We select 2000 patches per class (a total
of 400000 patches) for S = 4 scales to train dictionar-
ies via Sc. In Tab. 4, we compare our results with
the state-of-the-art. To our best of knowledge, our
BoS framework, with HIT patch, obtains the state-
of-the-art performances with 27.93% of overall accu-
racy, outperforming dictionary-free methods.
Table 4: Recognition rate and standard deviation on the
USCD-Birds200 dataset.
Algorithms Accuracy ± Std
BiCOS-MT (Chai et al., 2011) 16.20%
Discri. Decision Trees + RF (Yao et al., 2011) 19.20%
Mult.-Cue+DITC (K = 5000) (Khan et al., 2011) 22.40%
HIT-ScSPM (K = 1024, our work) 27.93% ± 1.16
5.5 Stanford-Dogs120 Dataset
The Stanford-Dogs120 dataset is containing a total
of 20580 images assigned to M = 120 categories.
We crop all images with the provided bounding-box
ground-truth. 100 images per class are used to train,
the rest for testing (we use the provided train/test
set). This dataset represents also a challenging FGVC
task. We particularize Λ
Λ
Λ =
1 1 1 1 1
1
2
1
2
1
4
1
4
1
.
Color (R,G,B) information channels are used, sam-
pling patches and training dictionaries on each of
them. For the HIT patches, we fix t = 5. We select
2000 patches per class (a total of 240000 patches) for
S = 3 scales (S = {1, 2, 3}) to train dictionaries via
Sc. In Tab. 5, we compare our results with the state-
of-the-art. To our best of knowledge, our BoS frame-
work, with HIT patch, obtains the state-of-the-art per-
formances with 36.36% of overall accuracy with a
unique descriptor and linear SVM. A simple late fu-
sion of SIFT-ScSPM with HIT-ScSPM (product of
p(y = 1|x
x
x)) gives a score of 40.03%.
Table 5: Recognition rate and standard deviation on the
Stanford-Dogs120 dataset.
Algorithms Accuracy ± Std
SIFT-ScSPM (Khosla et al., 2011b) 26.10%
SIFT-ScSPM (K = 2048, our implementation) 32.05%
HIT-ScSPM (K = 2048, our work) 36.36%
SIFT-ScSPM+HIT-ScSPM (K = 2048, our work) 40.03%
6 CONCLUSIONS AND
PERSPECTIVES
We have presented in this article the 2-layer BoS
architecture mixing HB/HIB/HT/HIT as a fast local
textures encoder for the first layer and Sc as scenes
encoder for the second. This first hand-graft layer
can advantageously replace complex hierarchical fea-
ture extractors such as Deep Belief Networks and
the patch extraction are even faster than SIFT ones,
thanks to the integral image technique. Achieved
performances outperform state-of-the-art results with
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
342

a simple linear SVM as well for object recognition
tasks as for FGVC ones.
As potential future works, many perspectives can
be investigated. For example, complementary patch,
multi-scale variants of LPQ could be coupled with our
HB/HIB/HT/HIT approach, in order train a unique
dictionary with these fused patches. Higher dimen-
sion local pattern can be also associated with the
Sc framework such those proposed by (Hussain and
Triggs, 2012). Finally, experimenting with LSc (Gao
et al., 2010) or FV (Krapac et al., 2011) should im-
prove the encoding part of the pipeline, while super-
vised pooling techniques (Jia et al., 2011) will surely
also improve results.
REFERENCES
Avila, S. E. F., Thome, N., Cord, M., Valle, E., and de Al-
buquerque Ara
´
ujo, A. (2011). Bossa: Extended bow
formalism for image classification. In ICIP’ 11.
Bianconi, F. and Fern
´
andez, A. (2011). On the occur-
rence probability of local binary patterns: A theoret-
ical study. Journal of Mathematical Imaging and Vi-
sion, 40(3):259–268.
Bianconi, F., Gonz
´
alez, E., Fern
´
andez, A., and Saetta,
S. A. (2012). Automatic classification of granite tiles
through colour and texture features. Expert Syst.
Appl., 39(12):11212–11218.
Bo, L., Lai, K., Ren, X., and Fox, D. (2011a). Object recog-
nition with hierarchical kernel descriptors. In CVPR’
11.
Bo, L., Ren, X., and Fox, D. (2010). Kernel descriptors for
visual recognition. In NIPS’ 10.
Bo, L., Ren, X., and Fox, D. (2011b). Hierarchical matching
pursuit for image classification: Architecture and fast
algorithms. In NIPS’ 11, pages 2115–2123.
Boiman, O., Shechtman, E., and Irani, M. (2008). In de-
fense of nearest-neighbor based image classification.
In CVPR’ 08.
Bosch, A., Zisserman, A., and Munoz, X. (2007). Im-
age classification using random forests and ferns. In
ICCV’ 07.
Boureau, Y., Bach, F., LeCun, Y., and Ponce, J. (2010a).
Learning mid-level features for recognition. In CVPR’
10.
Boureau, Y., Le Roux, N., Bach, F., Ponce, J., and LeCun,
Y. (2011). Ask the locals: multi-way local pooling for
image recognition. In ICCV’ 11.
Boureau, Y., Ponce, J., and LeCun, Y. (2010b). A theoreti-
cal analysis of feature pooling in vision algorithms. In
ICML’ 10.
Chai, Y., Lempitsky, V. S., and Zisserman, A. (2011). Bicos:
A bi-level co-segmentation method for image classifi-
cation. In ICCV’ 11.
Chatfield, K., Lempitsky, V., Vedaldi, A., and Zisserman,
A. (2011). The devil is in the details: an evaluation of
recent feature encoding methods. In BMVC.
Chen, J., Shan, S., He, C., Zhao, G., Pietikainen, M., Chen,
X., and Gao, W. (2010). Wld: A robust local image
descriptor. IEEE Trans. PAMI, 32(9).
Choi, J., Schwartz, W. R., Guo, H., and Davis, L. S. (2012).
A complementary local feature descriptor for face
identification. In WACV’ 12.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In CVPR’ 05.
Deselaers, T. and Ferrari, V. (2010). Global and efficient
self-similarity for object classification and detection.
In CVPR’ 10.
Duchenne, O., Joulin, A., and Ponce, J. (2011). A graph-
matching kernel for object categorization. In ICCV’
11.
Elfiky, N. M., Khan, F. S., van de Weijer, J., and Gonz
`
alez,
J. (2012). Discriminative compact pyramids for ob-
ject and scene recognition. Pattern Recognition,
45(4):1627–1636.
Fei-Fei, L., Fergus, R., and Perona, P. (2007). Learning gen-
erative visual models from few training examples: An
incremental bayesian approach tested on 101 object
categories. Comput. Vis. Image Underst., 106(1):59–
70.
Fr
¨
oba, B. and Ernst, A. (2004). Face detection with the
modified census transform. In FGR’ 04.
Gao, S., Tsang, I. W.-H., Chia, L.-T., and Zhao, P. (2010).
Local features are not lonely laplacian sparse coding
for image classification. In CVPR ’10.
Heikkil
¨
a, M., Pietik
¨
ainen, M., and Schmid, C. (2006). De-
scription of interest regions with center-symmetric lo-
cal binary patterns. In CVGIP ’06.
Hsieh, C., Chang, K., Lin, C., and Keerthi, S. (2008). A
dual coordinate descent method for large-scale linear
svm.
Huang, D., Shan, C., Ardabilian, M., Wang, Y., and Chen,
L. (2011). Local Binary Patterns and Its Application to
Facial Image Analysis: A Survey. IEEE Transactions
on Systems, Man, and Cybernetics, Part C: Applica-
tions and Reviews, 41(4):1–17.
Hussain, S. u. and Triggs, W. (2012). Visual recognition
using local quantized patterns. In CVPR’ 12.
Jia, Y., Huang, C., and Darrell, T. (2011). Beyond Spatial
Pyramids: Receptive Field Learning for Pooled Image
Features. In NIPS ’11.
Jun, B. and Kim, D. (2012). Robust face detection using lo-
cal gradient patterns and evidence accumulation. Pat-
tern Recognition, 45(9):3304–3316.
Khan, F. S., van de Weijer, J., Bagdanov, A. D., and Vanrell,
M. (2011). Portmanteau vocabularies for multi-cue
image representation. In NIPS’ 11.
Khosla, A., Jayadevaprakash, N., Yao, B., and Fei-Fei, L.
(2011a). Novel dataset for fine-grained image catego-
rization. In CVPR ’11.
Khosla, A., Jayadevaprakash, N., Yao, B., and Fei-Fei, L.
(2011b). Novel dataset for fine-grained image cate-
gorization. In First Workshop on Fine-Grained Visual
Categorization, CVPR ’11.
Krapac, J., Verbeek, J., and Jurie, F. (2011). Modeling Spa-
tial Layout with Fisher Vectors for Image Categoriza-
tion. In ICCV ’11.
EfficientBagofScenesAnalysisforImageCategorization
343

Larios, N., Lin, J., Zhang, M., Lytle, D., Moldenke, a.,
Shapiro, L., and Dietterich, T. (2011). Stacked spatial-
pyramid kernel: An object-class recognition method
to combine scores from random trees. In WACV’ 11.
Lazebnik, S., Schmid, C., and Ponce, J. (2006). Beyond
bags of features: Spatial pyramid matching for recog-
nizing natural scene categories. In CVPR’ 06.
Lee, H., Chung, Y., Kim, J., and Park, D. (2010). Face
image retrieval using sparse representation classifier
with gabor-lbp histogram. In WISA’ 10.
Li, F., Carreira, J., and Sminchisescu, C. (2010). Object
recognition as ranking holistic figure-ground hypothe-
ses. In CVPR’ 10.
Li, L. (2007). What, where and who? classifying event by
scene and object recognition. In CVPR ’07.
Liao, S., Zhu, X., Lei, Z., Zhang, L., and Li, S. Z. (2007).
Learning multi-scale block local binary patterns for
face recognition. In ICB.
Lowe, D. G. (2009). Object recognition from local scale-
invariant features. In ICCV’ 99.
Mairal, J., Bach, F., Ponce, J., and Sapiro, G. (2009). Online
dictionary learning for sparse coding. In ICML ’09.
Marcel, S., Rodriguez, Y., and Heusch, G. (2007). On the
recent use of local binary patterns for face authentica-
tion. International Journal on Image and Video Pro-
cessing Special Issue on Facial Image Processing.
Ojala, T., Pietik
¨
ainen, M., and M
¨
aenp
¨
a
¨
a, T. (2002). Mul-
tiresolution gray-scale and rotation invariant texture
classification with local binary patterns. IEEE Trans.
PAMI, 24(7).
Oliva, A. and Torralba, A. (2001). Modeling the shape of
the scene: A holistic representation of the spatial en-
velope. International Journal of Computer Vision, 42.
Oliveira, G. L., Nascimento, E. R., Viera, A. W., and Cam-
pos, M. F. M. (2012). Sparse spatial coding: A novel
approach for efficient and accurate object recognition.
ICRA’ 12.
Paris, S. and Glotin, H. (2010). Pyramidal multi-level fea-
tures for the robot vision@icpr 2010 challenge. In
ICPR’ 10.
Perronnin, F., S
´
anchez, J., and Mensink, T. Improving the
fisher kernel for large-scale image classification. In
ECCV’ 10.
Sadat, R. M. N., Teng, S. W., Lu, G., and Hasan, S. F.
(2011). Texture classification using multimodal in-
variant local binary pattern. In WACV ’11.
Shalev-Shwartz, S., Singer, Y., Srebro, N., and Cotter, A.
(2007). Pegasos: Primal estimated sub-gradient solver
for svm.
Sohn, K., Jung, D. Y., Lee, H., and Hero III, A. O. (2011).
Efficient Learning of Sparse , Distributed , Convo-
lutional Feature Representations for Object Recogni-
tion. ICCV’ 11.
Tan, X. and Triggs, B. (2010). Enhanced local texture fea-
ture sets for face recognition under difficult lighting
conditions. Trans. Img. Proc., 19(6):1635–1650.
Tibshirani, R. (1996). Regression shrinkage and selection
via the lasso. Journal of the Royal Statistical Society
(Series B), 58.
Todorovic, S. and Ahuja, N. (2008). Learning subcategory
relevances for category recognition. In CVPR’ 08.
Viola, P. and Jones, M. (2004). Robust real-time face detec-
tion. International Journal of Computer Vision, 57.
Welinder, P., Branson, S., Mita, T., Wah, C., Schroff, F.,
Belongie, S., and Perona, P. (2010). Caltech-UCSD
Birds 200. Technical Report CNS-TR-2010-001, Cal-
ifornia Institute of Technology.
Willamowski, J., Arregui, D., Csurka, G., Dance, C. R., and
Fan, L. (2004). Categorizing nine visual classes using
local appearance descriptors. In ICPR’ 04.
Wu, J., Geyer, C., and Rehg, J. M. (2011). Real-time human
detection using contour cues. In ICRA’ 11.
Wu, J. and Rehg, J. (2009). Beyond the euclidean dis-
tance: Creating effective visual codebooks using the
histogram intersection kernel. In ICCV’ 09.
Wu, J. and Rehg, J. M. (2008). Where am i: Place instance
and category recognition using spatial pact. CVPR’
2008.
Yang, J., Li, Y., Tian, Y., Duan, L., and Gao, W. (2009a).
Group-sensitive multiple kernel learning for object
categorization. In ICCV’ 09.
Yang, J., Yu, K., Gong, Y., and Huang, T. S. (2009b). Lin-
ear spatial pyramid matching using sparse coding for
image classification. In CVPR’ 09.
Yao, B. and Bradski, G. (2012). A Codebook-Free and
Annotation-Free Approach for Fine-Grained Image
Categorization. In CVPR’ 12.
Yao, B., Khosla, A., and Li, F.-F. (2011). Combining ran-
domization and discrimination for fine-grained image
categorization. In CVPR’ 11.
Zhang, B., Gao, Y., Zhao, S., and Liu, J. (2010). Local
derivative pattern versus local binary pattern: Face
recognition with high-order local pattern descriptor.
IEEE Trans. Img. Proc., 19(2).
Zhang, L., Chu, R., Xiang, S., Liao, S., and Li, S. Z. (2007).
Face detection based on multi-block lbp representa-
tion. In ICB’ 07.
Zhang, W., Shan, S., Qing, L., Chen, X., and Gao, W.
(2009). Are gabor phases really useless for face recog-
nition? Pattern Anal. Appl., 12(3):301–307.
Zheng, Y., Shen, C., Hartley, R. I., and Huang, X. (2010).
Effective pedestrian detection using center-symmetric
local binary/trinary patterns. CoRR, abs/1009.0892.
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
344
