
A New Evaluation Framework and Image Dataset for Keypoint
Extraction and Feature Descriptor Matching
I
˜
nigo Barandiaran
1,2
, Camilo Cortes
1,3
, Marcos Nieto
1
, Manuel Gra
˜
na
2
and Oscar E. Ruiz
3
1
Vicomtech-IK4 Research Alliance, San Sebasti
´
an, Spain
2
Dpto. CCIA, UPV-EHU, San Sebasti
´
an, Spain
3
CAD CAM CAE Laboratory, Universidad EAFIT, Carrera 49 No 7 Sur - 50, Medell
´
ın, Colombia
Keywords:
Keypoint Extraction, Feature Descriptor, Keypoint Matching, Homography Estimation.
Abstract:
Key point extraction and description mechanisms play a crucial role in image matching, where several image
points must be accurately identified to robustly estimate a transformation or to recognize an object or a scene.
New procedures for keypoint extraction and for feature description are continuously emerging. In order to
assess them accurately, normalized data and evaluation protocols are required. In response to these needs, we
present a (1) new evaluation framework that allow assessing the performance of the state-of-the-art feature
point extraction and description mechanisms, (2) a new image dataset acquired under controlled affine and
photometric transformations and (3) a testing image generator. Our evaluation framework allows generating
detailed curves about the performance of different approaches, providing a valuable insight about their be-
havior. Also, it can be easily integrated in many research and development environments. The contributions
mentioned above are available on-line for the use of the scientific community.
GLOSSARY
I : Set of images
I
n
: Image n of set I
x
in
: pixel position in I
n
of a keypoint in R
2
H
ab
: Homography that maps pixels of I
a
to I
b
d(a, b) :
k
a − b
k
2
1 INTRODUCTION
Several computer vision-based applications rely on
keypoint matching. Depending on the nature of such
applications, the requirements for a specific keypoint
extractor and descriptor may vary. For example, ap-
plications related with self-navigation or simultane-
ous location and mapping (SLAM) require a fast key-
point extractor algorithm because of their real-time
restrictions. On the other hand, an application for ob-
ject or image recognition benefits from a more robust
keypoint descriptor; even if this implies a higher com-
putation time.
A keypoint is a distinguished point in R
2
repre-
senting the projection of a particular structure of a 3D
scene. A feature descriptor is a vector in R
k
that
contains a set of attributes that intend to uniquely rep-
resent x
in
.
Currently, there is an increasing activity in the
development of new approaches for keypoint extrac-
tion, description and matching, pursuing robustness
and low computational complexity. In order to assess
these new approaches accurately, normalized data and
evaluation protocols are required.
Responding to the mentioned needs, in this paper
we present a new evaluation framework for the eval-
uation of the state-of-the-art keypoint extractors and
feature point descriptors.
Formally, the framework discussed here has the
following I/O specification:
INPUTS: (1) A set I =
{
I
1
, I
2
, . . . , I
z
}
captured from
a particular scene. (2) A set of bijection functions
S
0
=
f
1,2
, f
1,3
, . . . , f
i, j
, . . .
, such that f
i, j
: I
i
→ I
j
es-
tablishes the real correspondence between pixels of
I
i
and I
j
, so that mapped pixels actually mark the
same 3D point. (3) A set of matching algorithms
A =
{
A
1
, A
2
, . . . , A
w
}
. Algorithm A
m
is an arbitrary
configuration of a keypoint extraction approach and
a feature description technique. A
m
produce an alter-
native set of functions S
m
when applied on I, which
match the images of I among themselves. The set S
0
is the ground-truth data of I, since it is the set of map-
252
Barandiaran I., Cortes C., Nieto M., Graña M. and Ruiz O..
A New Evaluation Framework and Image Dataset for Keypoint Extraction and Feature Descriptor Matching.
DOI: 10.5220/0004211502520257
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 252-257
ISBN: 978-989-8565-47-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

pings corresponding to reality. The set of functions
S
m
is considered imperfect, since it resembles the ac-
tual set S
0
.
OUTPUTS: A set of performance evaluations for the
matching algorithm A
m
(1 ≤ m ≤ w). These perfor-
mance evaluations obviously grade the quality of A
m
against the ground-truth data. This appraisal allows
measuring several algorithm’s features, such as re-
peatability, accuracy and invariance to affine or pho-
tometric transformations.
In addition, this article reports the protocol for
producing a particular set I under controlled affine
and photometric transformations. The capture has
been conducted using a methodology that allows to
ensure that only one kind of transformation occur for
a series of images. This permits to determine how
sensitive is A
m
to a specific factor. In order to supple-
ment the dataset of real images, we present an image
generator that allows producing images with affine or
photometric transformations for testing purposes.
The research community and the practitioners on
computer vision applications can obtain valuable in-
formation from the mentioned contributions to im-
prove their approaches or to select the algorithm that
best suit their needs.
2 RELATED WORK
Tuytelaars et al. suggested that there are several
parameters of a point detector and feature descriptor
that can be measured to assess their performance
(Tuytelaars and Mikolajczyk, 2008). However, to
measure some of them, such as the point extrac-
tor accuracy, descriptor robustness or invariance
a normalized test protocol and test benchmark
are required. In this way, the seminal works of
Mikolajczyk et al. settled the basis for keypoint
extractor and feature description evaluations (Miko-
lajczyk and Schmid, 2005). Since then, several
new approaches for keypoint or region extraction
(Mikolajczyk et al., 2007) and for feature description
(Bay et al., 2006; Heikkil
¨
a et al., 2009; Bellavia
et al., 2010; Leutenegger et al., 2011) were tested
against their dataset and evaluated with their corre-
sponding scripts, which are freely available online at
www.robots.ox.ac.uk/ vgg/research/affine/index.html.
Recently, Gauglitz et al. proposed a dataset of sev-
eral videos of surfaces, with different types of textures
and different light conditions, which are used to eval-
uate keypoint matching strategies oriented to camera
tracking applications (Gauglitz et al., 2011). The au-
thors claim that due to restrictions of the hardware
they used to move the camera for the generation of
different points of view, they could not reproduce ex-
actly the same movements every time they changed
scene conditions. This implies that the evaluation of a
particular factor may not be performed given the dif-
ferences in the geometric transformations during the
acquisition of I.
Very recently, Alahi et al. (Alahi et al., 2012)
tested their descriptor approach with the dataset and
evaluation framework of Mikolajczyk and Schmid
(Mikolajczyk and Schmid, 2002). However, they also
tested their descriptor with a non-publicly accessi-
ble approach in computer-vision-talks.com, which is
similar to our evaluation framework proposal. This
framework allowed the authors to compare the ro-
bustness of their descriptor against different geomet-
ric transformation values, in the form of a ratio be-
tween correct and wrong matches. The authors affirm
that this approach provides a very useful insight about
the tested descriptors.
Important contributions have been performed to
assess the performance of the extraction and match-
ing mechanisms using non-planar scenes. Fraun-
dorfer and Bischof (Fraundorfer and Bischof, 2005)
proposed an extension of the work of Mikolajczyk
and Schmid (Mikolajczyk and Schmid, 2005) by an-
alyzing keypoint repeatability for non-planar scenes.
They used tri-focal tensor geometric restriction for es-
timating the ground-truth data of their own dataset.
Other relevant works in this field are presented by Gil
et al. (Gil et al., 2010) and Moreels et al. (Moreels
and Perona, 2007).
Our dataset and evaluation framework are inspired
by the developments of Mikolajczyk and Schmid
(Mikolajczyk and Schmid, 2005). In comparison to
that approach, our contribution comprises a higher
number of images, with higher resolution and with
better controlled conditions, and it is supplemented
with an image generator. For the acquisition of im-
ages we used different types of sensors, including mo-
bile devices. It is important to consider some features
of these devices, such as their low dynamic range, in
a testing data. To the best of our knowledge, this fea-
ture lacks in the available testing datasets. Our dataset
present variations in both geometric (e.g. similarities
and affinities) and photometric transformations (e.g.
luminance and chrominance noise addition).
Finally, our evaluation framework is written in
C++, which makes its integration in development
environments straightforward, and allows generating
detailed curves about the performance of different ap-
proaches.
All presented material in this work, i.e., images,
code and binary executables will be freely available
on-line at www.vicomtech.tv/keypoints.
ANewEvaluationFrameworkandImageDatasetforKeypointExtractionandFeatureDescriptorMatching
253
3 EVALUATION FRAMEWORK
We have implemented an evaluation framework based
on the one present in the Open Source Computer
Vision Library (OpenCV) (Bradski, 2000). It uses
the class hierarchy implemented in OpenCV that de-
couples keypoint extraction from keypoint descrip-
tion and descriptor matching, allowing to try differ-
ent configurations of keypoint extractor, descriptors
and matchers. Whereas Mikolajczyk’s work (Miko-
lajczyk and Schmid, 2005), where the framework is
written in Matlab scripting, our approach is written
in C++, allowing its easy integration in a develop-
ment environment. Thus, is not necessary to ex-
port additional data to other platforms, as occurs with
the mentioned Matlab-based evaluation framework,
which can be can be cumbersome, especially when
developing commercial software. Nevertheless, our
approach also supports the reading of Mikolajczyk’s
file format, allowing the comparison with previous
approaches or studies. Figure 1 shows partial results
Figure 1: Results of the evaluation of several feature de-
scriptors using the in-plane rotation.
of an evaluation conducted using our dataset and eval-
uation framework. In addition to the precision-recall
curves proposed by Mikolajczyk and Schmid (Miko-
lajczyk and Schmid, 2002), our framework generates
detailed performance curves based on the number of
correct matches given specific values of the evaluated
transformation. For example, Figure 1 shows the re-
sult of the number of correct matches of several fea-
ture descriptors against a dataset composed of several
in-plane rotations of an image. They suggest that, for
example, BRIEF descriptors are not robust against a
rotation larger than 35 degrees approximately. Also,
it can be observed that SURF approach is more sensi-
tive to orientations like 90, 180 and 270 degrees, pos-
sibly due to discretization effects related with the use
of box filters for approximating LoG filtering. In this
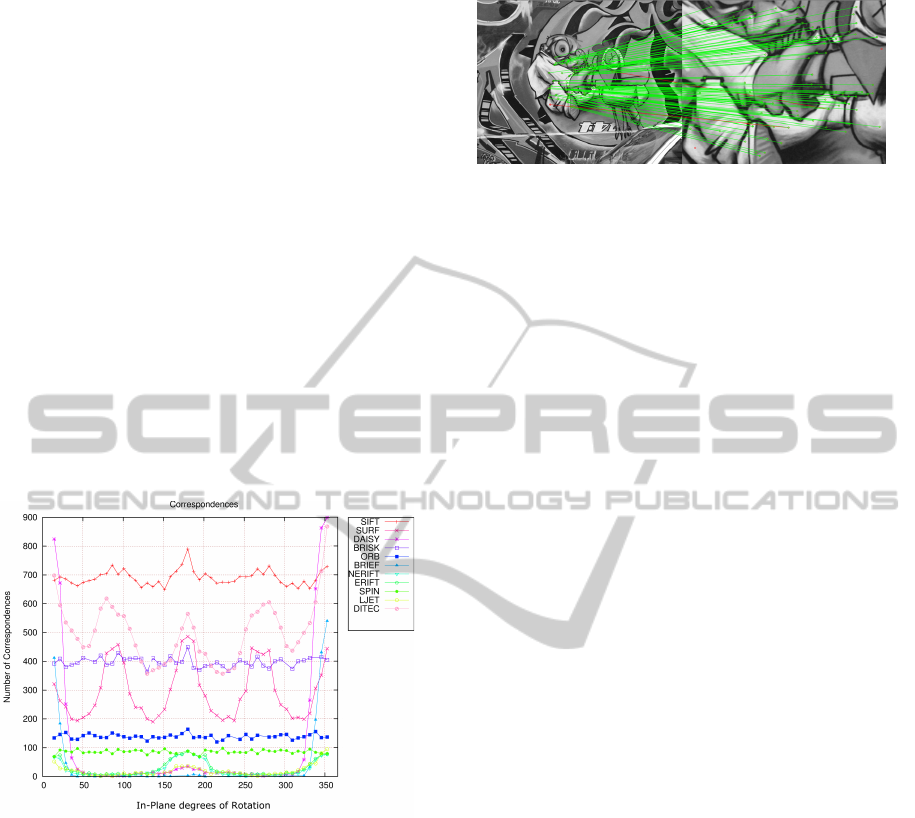
Figure 2: Correct matches (in green), wrong matches (in
red) between two images.
way, a better insight of the behavior of a given ap-
proach can be obtained.
3.1 Matching Evaluation
An image formation process is usually represented as
in Equation 1 where Y
w
represents a point in R
3
and
Y
i
corresponds to the projection of Y
w
in the image. P
represents the projection matrix, described in Equa-
tion 2, where K describes the transformation from the
camera reference frame to the image reference frame,
and [R|t] the composition of a translation and a rota-
tion transformation between world and camera coor-
dinate systems.
y
i
= PY
w
(1)
P = K[R|t] (2)
When either points Y
w
lie on a plane, or the images
are acquired with a camera rotating around its center
of projection, the transformation among points y
i
and
points Y
w
corresponds to a 2D linear projective trans-
formation or homography H (Hartley and Zisserman,
2004).
As in the dataset proposed by Mikolajczyk and
Schmid (Mikolajczyk and Schmid, 2002), a 2D ho-
mograhpy relate all images in our set I. This known
transformation is used as ground truth data, allowing
to know a priori where x
ia
should be projected in I
b
by using Equation 3.
x
jb
= H
ab
x
ia
(3)
Similarly, keypoints from I
b
can be projected back
to I
a
by using the inverse of H
ab
. Let ˜x
jb
be the esti-
mated match of x
ia
obtained by a given A
m
. Then, H
ab
is used to measure the accuracy and repeatability of a
point detector algorithm. This process is performed
by computing the error measure d
i j
of the estimated
and the ground truth keypoints of a pair of images, as
shown in Equation 4.
d
i j
= d( ˜x
jb
, H
ab
x
ia
)
2
+ d(x
ia
, H
−1
ab
˜x
jb
)
2
(4)
In order to estimate correct matches m
ab
of key-
point pairs x
ia
and ˜x
jb
, as shown in Figure 2, we used
the overlap error defined by equation 5 to reduce the
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
254

Figure 3: Image acquisition setup with Kuka robotic arm
and Canon 7D attached.
probability of occurrence of false positive matches
(Mikolajczyk and Schmid, 2002). Consider two el-
lipsoidal support regions R
ia
and R
jb
estimated by a
point extraction algorithm. The error in equation 5
measures how well the supporting regions correspond
under the geometric transformation H
ab
.
ε
s
= 1 −
R
ia
∩ H
T
ab
R
jb
H
ab
R
ia
∪ H
T
ab
R
jb
H
ab
(5)
We calculate the ellipses overlap by using the soft-
ware proposed by Hughes and Chraibi (Hughes and
Chraibi, 2011), which is available at www.chraibi.de.
If point pair x
ia
and ˜x
jb
present an error measure
d
i j
given by equation 4 and overlap error given by
equation 5 under some predefined thresholds, then it
is considered as a correspondece.
4 IMAGE DATASET
4.1 Acquisition Setup
Our image acquisition setup is composed by a DSLR
Canon 7D and an iPad with a 5 Mega pixels built-in
camera. In the Canon 7D scenario we used a Tam-
ron 17-50mm f2.8 and a Canon 100mm f2.8 macro
lenses. In addition to the camera, we used two Canon
580EXII flash with light diffuser, both operated wire-
lessly and synchronized with the acquisition. In the
case of the iPad setup we can not synchronize the light
with the acquisition, so we decided to use continuous
light source instead of flashes.
4.2 Geometric Transformations
In order to generate a set of images with different val-
ues of perspective distortion, we used a Kuka robotic
arm with a Canon 7D attached with Tamron lens (see
figure 3) to obtain several points of view of a tar-
get scene by traversing circular trajectories (arcs), as
shown in Figure 4. The robot allowed us to gener-
ate known, repeatable and precise poses and trajec-
tories around the target scene, as an improvement to
the manual acquisition described by Gauglitz et al.
(Gauglitz et al., 2011). To generate and command
the follow up of the desired trajectories, we developed
an application in C++, which uses the Kuka Fast Re-
search Interface to interface with the robot.
We used a Wacom Cintiq screen for displaying
the target images, instead of using pictures placed in
a wall or in a table as performed by Gauglitz et al.
(Gauglitz et al., 2011). Our set of displayed images
covers different types of images with structured, un-
structured and low texture, as well as repeating pat-
terns. Several authors (Tuytelaars and Mikolajczyk,
2008; Heikkil
¨
a et al., 2009; Gauglitz et al., 2011)
agree in the importance of evaluating keypoint extrac-
tors and descriptors in different conditions to truly test
their robustness.
The described trajectories are resampled accord-
ing to a desired number of points M, along them,
where images are to be taken. The set Q =
{
Q
1
, Q
2
, . . . , Q
M
}
constitutes the resulting discretized
trajectory. Each Q
i
∈ Q is 3x4 matrix that describes
the i-th (1 ≤ i ≤ M) desired pose of the camera with
respect to the robot’s base coordinate system. This
means that the original circular path is approximated
in a piecewise linear way. Analogously, the orienta-
tion of the camera at each Q
i
is determined by per-
forming a linear interpolation of the total rotation ma-
trix R
T
, defined by R
T
= R
M
(R
1
)
−1
, where R
M
and R
1
correspond to the rotation parts of Q
M
and Q
1
respec-
tively. Therefore, R
T
is applied in M − 1 steps, which
can be done easily using quaternion notation.
Figure 4: Recovered trajectory from a circular sector of a
robot-driven image acquisition.
The set Q is traversed in order. When the camera
reaches a particular Q
i
, a signal is send to it in order to
take N pictures in a synchronous way. At any Q
i
the
first picture to be taken corresponds to the calibration
pattern image; then N − 1 pictures of other images
shown on the Wacom Cintiq screen are taken. While
pictures are being taken the robot holds its position.
We used the calibration pattern image to calculate
the extrinsic and intrinsic parameters of the camera,
ANewEvaluationFrameworkandImageDatasetforKeypointExtractionandFeatureDescriptorMatching
255

Figure 5: Some images of exposure varying dataset compound of 15 different images.
and also to estimate the homographies between im-
ages accurately. This also allowed us to rectify the
distortion of the images.
This novel implementation guarantees that the ho-
mography that relate the images taken at Q
i
and Q
i+1
is the same for all pictures. Thus, this allows to under-
take the performance evaluations under the same ge-
ometric transformation and different image’s texture
patterns.
4.2.1 Image Focus
In addition to the capability of generating unfocused
images with our testing image generator, we also cap-
tured real scenes because unfocused images are not
only Gaussian smoothed versions of a correctly fo-
cused image. The shape of the lens diaphragm and the
value of the lens aperture, which determines depth of
field, play an important role in the final rendered im-
age; therefore it is not easy to simulate their effect
synthetically. We present an image dataset where the
focus point is progressively varying from a correct fo-
cus point, i.e., all objects in the scene are accurately
rendered in images as sharp, to a point where all ob-
jects appear blurred or unfocused.
In this subset of images, even if the camera was
not moved along the image sequence acquisition,
changes made in the camera focus required to com-
pute the homography between images.
4.3 Photometric Transformations
Photometric transformations are also involved in the
process of image formation. These ones are related
to the camera settings, light conditions and the nature
of the camera hardware (mainly the camera sensor).
Here we present a set of images that show a variation
in the light condition or light exposure, as shown in
Figure 5. The purpose of this subset is to be able to
evaluate the robustness of keypoint extractors repeata-
bility or feature descriptors robustness against illumi-
nation changes and noise.
Image acquisition was carried out by operating the
illumination equipment and the camera remotely, en-
suring that no geometric transformations were applied
and only photometric transformations occur between
the images that form this dataset. This implies that
the homography matrix that relates them geometri-
cally correspond to the identity matrix.
The use of flashes to generate the illumination of
the scene allowed us to vary the amount of light with-
out changing any camera acquisition parameters, set-
ting fixed the aperture value, the exposure time and
ISO speed. In this way, neither the depth of field
(DOF) is varied along the images that constitute the
dataset, nor additional noise is added due to an in-
crease of ISO speed or sensor heat because of longer
exposure times. Every image in this dataset is con-
secutively reduced approximately an 1/3 of a f-stop,
starting with a correct exposure in the first image.
This dataset is composed of 15 images resulting in
a difference of 4.5 f-stops between the first and last
images.
Figure 6: Images from the exposure varying dataset taken
with a mobile device.
Figure 6 shows two images of the same scene
taken with an iPad in controlled illumination condi-
tions. Left image was captured with a correct value
of exposure, while the right image was captured with
approximately 2.5 f-stops less of exposure. For this
setup we used a continuous light source where light
intensity can be set manually. It is worth mention-
ing that the focus point, exposure metering point and
aperture were fixed along the capturing of all images
in the dataset.
As expected, in both scenarios, as the amount of
light decreases, i.e., the signal-to-noise ratio (SNR)
decreases, the amount of digital noise increases. This
is clearly more noticeable in the case of the mobile
device, due to the smaller size of its image sensor,
and therefore a more limited dynamic range compared
with the DSLR camera.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
256

5 IMAGE GENERATOR
In addition to the proposed set of images, we imple-
mented a set of C++ functions and Python scripts that
allow the generation of several testing images by ap-
plying either random or systematic geometric trans-
formations, as well as photometric transformations.
The proposed testing image generator allows to
generate transformed views of a source image by
applying similarity transformations such as isotropic
scaling, as shown in Figure 7, or in-plane rotation, as
well as other affine transformations in one or several
directions.
Digital image noise can be classified mainly in
two categories, luminance and chrominance. Our im-
age generator is able to create images contaminated
with luminance or chrominance noise, or with both
types simultaneously.
Figure 7: Scale transformed views of the first image of
the Graffiti dataset proposed in (Mikolajczyk and Schmid,
2002).
6 CONCLUSIONS
We have presented a new set of images, as well as
an image generator and an evaluation framework that
allow evaluating approaches related with image key-
point extraction, description and matching for both
standard and mobile devices. Our framework can be
seen as an evolution of the extensively used evalua-
tion framework of Mikolajczyk and Schmid (Miko-
lajczyk and Schmid, 2002). Moreover, the presented
image dataset has a higher number of images, with
higher resolution and with better controlled geometric
and photometric conditions. The evaluation frame-
work is entirely written in C++, and therefore easily
integrable in many research and development envi-
ronments of this field.
We are currently using and extending our pro-
posed framework for the evaluation of state-of-the-art
approaches for keypoint feature descriptors, such as
BRIEF, ORB, RIFF, sGLOH, FREAK, NERIFT, or
BRISK, among others, with real acquired images, as
well as with synthetically generated ones.
REFERENCES
Alahi, A., Ortiz, R., and Vandergheynst, P. (2012). Freak:
Fast retina keypoint. In IEEE Conference on Com-
puter Vision and Pattern Recognition (To Appear).
Bay, H., Tuytelaars, T., and Van Gool, L. (2006). Surf:
Speeded up robust features. Computer Vision–ECCV
2006, pages 404–417.
Bellavia, F., Tegolo, D., and Trucco, E. (2010). Improv-
ing sift-based descriptors stability to rotations. In Pro-
ceedings of the 2010 20th International Conference on
Pattern Recognition, pages 3460–3463. IEEE Com-
puter Society.
Bradski, G. (2000). The OpenCV Library. Dr. Dobb’s Jour-
nal of Software Tools.
Fraundorfer, F. and Bischof, H. (2005). A novel per-
formance evaluation method of local detectors on
non-planar scenes. In Computer Vision and Pat-
tern Recognition-Workshops, 2005. CVPR Work-
shops. IEEE Computer Society Conference on, pages
33–33. IEEE.
Gauglitz, S., H
¨
ollerer, T., and Turk, M. (2011). Evaluation
of interest point detectors and feature descriptors for
visual tracking. International journal of computer vi-
sion, pages 1–26.
Gil, A., Mozos, O., Ballesta, M., and Reinoso, O. (2010). A
comparative evaluation of interest point detectors and
local descriptors for visual slam. Machine Vision and
Applications, 21(6):905–920.
Hartley, R. I. and Zisserman, A. (2004). Multiple View Ge-
ometry in Computer Vision. Cambridge University
Press, ISBN: 0521540518, second edition.
Heikkil
¨
a, M., Pietik
¨
ainen, M., and Schmid, C. (2009). De-
scription of interest regions with local binary patterns.
Pattern recognition, 42(3):425–436.
Hughes, G. and Chraibi, M. (2011). Calculating ellipse
overlap areas. arXiv preprint arXiv:1106.3787.
Leutenegger, S., Chli, M., and Siegwart, R. (2011). Brisk:
Binary robust invariant scalable keypoints. In Com-
puter Vision (ICCV), 2011 IEEE International Con-
ference on, pages 2548–2555. IEEE.
Mikolajczyk, K. and Schmid, C. (2002). An affine invariant
interest point detector. Computer Vision,ECCV 2002,
pages 128–142.
Mikolajczyk, K. and Schmid, C. (2005). A perfor-
mance evaluation of local descriptors. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on,
27(10):1615–1630.
Mikolajczyk, K., Tuytelaars, T., Schmid, C., et al. (2007).
Affine covariant features. Collaborative work be-
tween: the Visual Geometry Group, Katholieke Uni-
versiteit Leuven, Inria Rhone-Alpes and the Center for
Machine Perception.
Moreels, P. and Perona, P. (2007). Evaluation of features
detectors and descriptors based on 3d objects. Inter-
national Journal of Computer Vision, 73(3):263–284.
Tuytelaars, T. and Mikolajczyk, K. (2008). Local invariant
feature detectors: a survey. Foundations and Trends
R
in Computer Graphics and Vision, 3(3):177–280.
ANewEvaluationFrameworkandImageDatasetforKeypointExtractionandFeatureDescriptorMatching
257
