
Dense Multi-modal Registration with Structural Integrity using
Non-local Gradients
Sheshadri Thiruvenkadam
MIAL, GE Global Research, Bangalore, India
Keywords:
Multi-modal, Non-rigid Registration, Non-local Gradients.
Abstract:
In this work, the challenging problem of dense non-rigid registration [NRR] for multi-modal data is addressed.
We look at a class of differentiable metrics based on weighted L2 distance of non-local image gradients. For
intensity dependent choice of weights, the metric is seen to give enhanced multi-modal capability than using
just gradients. In a variational dense deformation setting, the metric is coupled with non-local regularization
to make the framework feature based. The above combination maintains the visual quality of the registered
image, and gives a good correspondence for features of similar geometry under the challenges of noise, large
motion, and presence of small structures. We also address computational speed ups of the energy minimization
using an approximation scheme. The proposed approach is demonstrated on synthetic and medical data, and
results are quantitatively compared with MI based, diffeomorphic NRR.
1 INTRODUCTION
Multi-modality and large non-rigid motion (relative
to scale of structures) are the primary challenges of
accurate image registration. Mutual information [MI]
based approaches and their extensions have been quite
successful for coarse non-rigid registration of multi-
modal data, see survey (Pluim et al., 2003). Re-
cent works have also extended MI to recover local
deformations (Likar and Pernus, 2001; Hellier and
Barillot, 2000; Loeckx et al., 2010; Lu et al., 2010).
Though MI has been demonstrated and widely used
as a popular multi-modal metric, the non-convexity
of the metric due to interpolation induced artifacts
makes it computationally challenging to use for dense
NRR. The above reason has motivated works to look
at alternative multi-modal metrics that are well be-
haved e.g Normalized gradients (Haber and Moder-
sitzki., 2007). Image gradients have also been widely
addressed in the vision literature e.g. (Lowe, 2004;
Mikolajczyk and Schmid, 2005) for many applica-
tions. Intuitively, match of gradients should give
some multi-modal capability (to spatially linear in-
tensity variations) since differences in relative inten-
sities are only penalized. While the above image gra-
dient based works capture only local intensity inter-
actions, we are motivated to look at non-local inter-
actions between intensities which should give better
robustness to noise and intensity variations. Specif-
Figure 1: Structural integrity and point correspondences.
ically we model intensity differences between pixel
pairs in a large neighborhood through non-local gra-
dients. We wish to note that a recent work (Heinrich
et al., 2011) has also looked at modelling non-local
intensity relationships to achieve promising results on
multi-modal data.
The other challenge of large deformations has
been addressed using multi-resolution strategies, fluid
flow regularization, and diffeomorphic frameworks;
for a recent survey see (Holden, 2008). These
works address the problem of spatial integrity (pre-
serving the topology of structures) under large defor-
mations. Another aspect which has not been carefully
addressed in the registration community is structural
integrity, i.e. the visual quality of the registered im-
age, which is challenged by noise, large motion, and
presence of small structures. To illustrate, in Fig. 1,
the registered T1 MR image (c) looks very similar in
intensity to the fixed image (a), but has lost definitive
features of the moving image (b). Although it seems
difficult to directly model and subsequently evaluate
the registered image’s visual quality, a key driver is
258
Thiruvenkadam S..
Dense Multi-modal Registration with Structural Integrity using Non-local Gradients.
DOI: 10.5220/0004211702580263
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 258-263
ISBN: 978-989-8565-47-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

the quality of correspondences between key feature
points. Also in many applications such as motion
tracking, it is desirable that the computed map gives
a good correspondence of points of similar geometry.
In Fig. 1 (synthetic example), the registered image
(f) looks exactly like the fixed image (d), but key fea-
ture points (Red ’+’) are incorrectly mapped on the
moving image (e). Feature based methods (Zitova
and Flusser, 2003) as against intensity based meth-
ods have been successful in achieving structural in-
tegrity atleast in neighborhoods of strong features. In
both intensity and feature based methods, the com-
puted maps follow the data near strong feature loca-
tions and are driven to homogeneous regions by local
regularization. As a result, one notices un-realistic
motion in homogeneous regions (e.g. in Fig. 1 (e),
the quality of correspondences are worse in homo-
geneous regions). One way to handle this issue is
through the use of patch based metrics, e.g. (Bruhn
et al., 2005), where the data term is effective in a
neighborhood of strong features as defined by the
patch size. Another possibility is to use non-local reg-
ularization (Sun, 2010; Werlberger, 2010) of the de-
formation fields which gives increased robustness to
large motion/noise, compared to local approaches.
In this work, we contribute towards a variational
framework capable of dense NRR for Multi-modal
data. The framework also addresses the aspects of
structural integrity of the registered image and qual-
ity of correspondences. A class of differentiable met-
rics based on weighted L2 distance of non-local gradi-
ents is proposed. Intensity dependent weights within
the metric give enhanced multi modal capability sim-
ilar to mutual information based approaches. Since
minimizing the above energy is expensive due to non-
linearities, an approximation scheme for speed up is
proposed. Next, we couple our metric with non-local
regularization (Sun, 2010; Werlberger, 2010) to make
the framework feature based. The above combina-
tion maintains the visual quality of structures in the
registered image and also gives a correspondence of
similar features under challenges of noise, large mo-
tion, and presence of small structures. The approach
is demonstrated using experiments on synthetic and
medical data, and quantitative comparisons are shown
with MI based dense, diffeomorphic NRR.
2 FORMULATION
Given template(fixed) and target(moving) images
f , m : Ω → ℜ, we want to recover transform t between
the image domains. As mentioned previously, the mo-
tivation is to look at intensity-relationships between
Figure 2: Map of level curves of f (Brown), m(Red) before
and after registration
pixel pairs in a larger neighborhood, thus improving
robustness to noise and intensity variations.
2.1 Metric using Non Local Gradients
Although there are many ways to define intensity-
relationships between pixels, in this work, we want to
preserve intensity differences between mapped pixel
pairs in the template and target domains. Let tx denote
the mapped location for pixel x. We look at a general
class of metrics defined through non-local gradients:
E[t] =
Z
Ω
Z
Ω
w(x, y)
(m(ty)− m(tx)) − ( f (y) − f (x))
2
dydx
(1)
Here w is a weight function that defines the impor-
tance of the pixel-pair (x,y). For simplicity, assuming
that the weights do not depend on t, we arrive at the
following Euler Lagrange equation [EL] for E. De-
noting ¯w(x, y) =
w(x,y)
R
Ω
w(x,y) dy
, we have,
Z
Ω
¯w(x, y)m(ty) dy − m(tx) −
Z
Ω
¯w(x, y) f (y) dy − f (x)
∇m(tx) = 0 (2)
The choice of weights impacts multi-modal capa-
bility and computational expense. Obvious choices
of weight functions are w(x, y) = B
R
(|x − y|), where
B
R
is the indicator function for [0, R], and w(x, y) =
G
σ
(|x − y|), G
σ
is a Gaussian (0, σ). For these weight
functions, it is interesting to see that the descent equa-
tion of (2) is similar to that of SSD-intensity, after
intensity normalization of f and m in local neighbor-
hoods around each pixel. This gives some robustness
to intensity variations. Further, the integrals in (2) are
convolutions and hence fast to compute.
For better multimodal capability, we consider
intensity dependent weights, w(x, y) = δ(| f (x) −
f (y)|)G
σ
(|x − y|), δ is the Dirac delta function. Now
the energy (1) becomes:
˜
E[t] =
Z
Ω
Z
Ω
w(x, y)
m(ty) − m(tx)
2
dydx (3)
DenseMulti-modalRegistrationwithStructuralIntegrityusingNon-localGradients
259

With EL:
Z
Ω
¯w(x, y)m(ty) dy − m(tx)
∇m(tx) = 0 (4)
Intuitively, the metric now maps level curves of f
to level curves of m locally at each pixel x, Fig. 2.
In fact, the descent of (4) would converge when for
each x, the level curve passing through f (x) maps to
a level curve through m(tx). Since the actual intensity
of the iso-contours of f and m is not taken into ac-
count while matching, we get better flexibility to mul-
timodal data as compared to the gaussian choice of
weights. Here, the descent will not involve convolu-
tions, hence approximations for computational speed
up are needed, which would be dealt with shortly.
2.2 Non Local Regularization
In many registration applications, the visual quality of
the registered image and correspondence between fea-
tures that the computed map achieves are important.
Feature based methods (Zitova and Flusser, 2003;
Haber and Modersitzki., 2007) are partly successful
in preserving structure around features and also drive
the registration based on feature correspondence.
The proposed metric (1) is not yet feature based;
e.g. in a monomodal scenario, once the registered im-
age m·t (· denotes composition) matches the fixed im-
age f , the geometry (e.g. gradients, hessian) would
match as well. Analogous to matching image gradi-
ents, we need to match ∇ f (x) and ∇m(tx) for fea-
ture based capability, and not ∇ f (x) and ∇(m · t)(x).
Representing tx = x + u(x), we want to match f (y) −
f (x) with m(y + u(x)) − m(x + u(x)), instead of with
m(y + u(y)) − m(x + u(x)). One possibility would be
to directly use a patch based metric of Non-Local
gradients taking the form
R
Ω
R
Ω
w(x, y)
m(y + u(x)) −
m(x + u(x)) − ( f (y) − f (x))
2
dydx. But this would
be expensive even for Gaussian weights, since the EL
would not involve convolutions. Secondly, the above
patch based metric intrinsically assumes rigid mis-
alignments, thus proving very restrictive while recov-
ering non-rigid motion. These issues are highlighted
in the Results section.
With this understanding, to make our energy (1)
feature based, we consider a penalty of the form
R
Ω
R
Ω
˜w(x, y)|u(y)−u(x)|
2
dydx with ˜w(x, y) as a weight
function. Adding the above penalty to (1) gives:
E
reg
[u] =
R
Ω
R
Ω
w(x, y)
(m(y + u(y)) − m(x + u(x)) − ( f (y) − f (x))
2
dydx
+λ
reg
Z
Ω
Z
Ω
˜w(x, y)|u(y) − u(x)|
2
dydx (5)
λ
reg
is a parameter balancing the two terms. The
regularization term penalizes non-local gradients of
the deformation field and has found recent interests
in optic flow methods. For computational simplic-
ity, we have used a L2 metric for the regularization
term and a straight forward choice for the weight term
˜w(x, y) = G
˜
σ
(|x − y|). Alternatively, the regulariza-
tion term can be replaced with NL-TV and intensity
dependent weights for better results, e.g. (Sun, 2010;
Werlberger, 2010). The distinct advantage over patch
based methods is that the rigidity of matching can be
controlled through λ
reg
thus allowing better capture
of local deformations. Our approach also shows the
benefits of patch based methods namely robustness to
noise, structural integrity, and match of features.
3 NUMERICAL
IMPLEMENTATION
To minimize (5), we use time descent given by the EL
and discretized using explicit finite differences. For
gaussian weights, the descent equation involves just
convolutions and is fast to compute. When the weight
is intensity dependent for better multimodal capabil-
ity, the integrals in the EL are no longer convolutions
and are expensive to compute. Below, an approxima-
tion scheme for speed up is proposed.
Consider the energy (3) with intensity dependent
weights, and EL given by 4. Using the co-area for-
mula for smooth functions (Jost and Li-Jost, 1998),
assuming |∇ f | > 0 a.e., it can be shown that (4) is
solved by the solutions of
ν(x, f (x))(m(tx) − µ(x, f (x)))∇m(tx) = 0,
where ν(x, λ) =
Z
f
−1
(λ)
G
σ
(|x − y|)d ˜s
λ
,
µ(x, λ) =
R
f
−1
(λ)
G
σ
(|x − y|)m(ty)d ˜s
λ
ν(x, λ)
(6)
Here, d ˜s
λ
=
ds
|∇ f (x)|
, d ˜s
µ
=
ds
|∇ f (y)|
, and ds is the arc-
length differential. f
−1
(λ) denotes the level curve
corresponding to λ. We discretize the above equa-
tions with finite differences and solve using iterative
descent. The descent is analogous to that of the SSD
metric where the update equations seek a transform t
to match intensities of the moving image m and the
evolving fixed image µ. The above arc-length inte-
grals can be reduced to region integrals by working
in a band around the level set λ. Also µ and ν are
’binned’ at discrete locations (x
i
, λ
i
) and interpolated
to get the value at (x, λ). Our experiments indicate
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
260
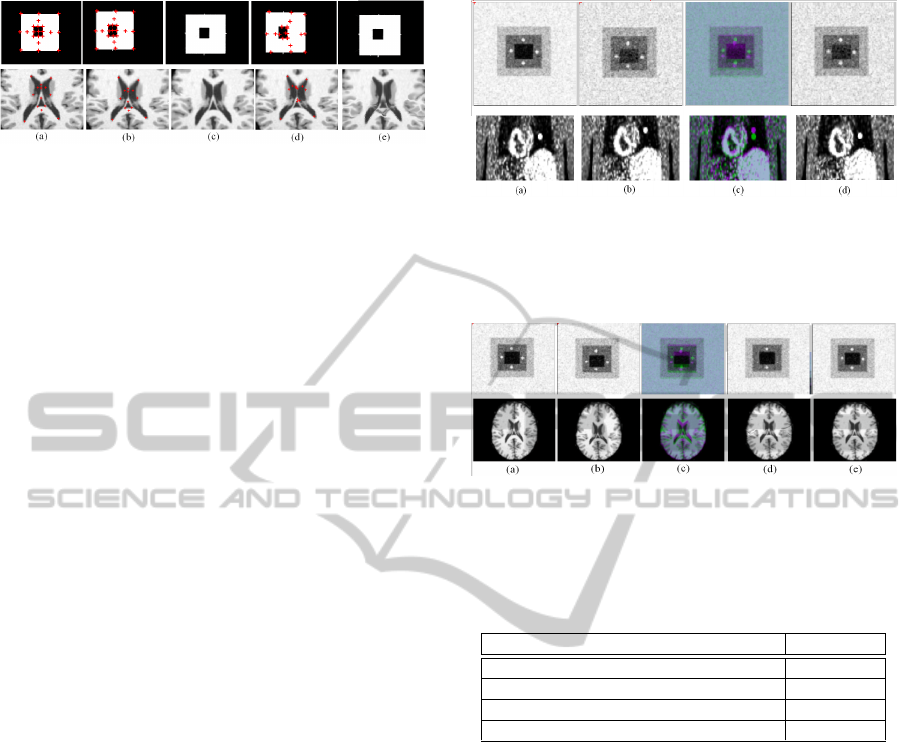
Figure 3: Quality of correspondences of key feature points
(Red ’+’) (a) fixed image (b) Moving image with mapped
points using Approach (c) Registered image using Ap-
proach (d) moving image with mapped points using SSD
NRR (e) Registered image using SSD NRR
that µ and ν have to be updated only once in 10-20 it-
erations effectively making the cost of every iteration
as number of pixels.
4 RESULTS
Here we present results on synthetic and medical data
to illustrate the algorithm’s performance. The use of
non-local gradients for proposed choice of weights
gives computationally tractable dense NRR capability
for multi-modal data. Also, combination with non-
local regularization gives structural integrity of the
registered image (under noise/large motion/presence
of small structures), and gives a good quality of cor-
respondences.
4.1 Quality of Correspondences and
Robustness
In Fig. 3, we illustrate quality of correspondences
using the proposed approach. In the two examples
shown in Fig. 3, the fixed image (a) is registered with
moving image (b). The objective is to see if key fea-
ture points (red ’+’ in (a)) are mapped to respective
locations on the moving image after NRR. In (d), re-
sults from SSD based NRR (SSD intensity metric +
local regularization of motion fields) shows incorrect
correspondences even in regions where the registered
image (e) is close to the fixed image. Remarkably, our
approach maps points to correct geometric locations
even at homogeneous regions (b), and gives very good
visual quality for the registered image (c). Next, in
Fig. 4, we show capability of preserving small struc-
tures while recovering large motion, and robustness to
noise. In Fig. 4, (a), (b) are noisy, fixed and moving
images (First row: synthetic, Second Row: PET phan-
tom data) with structures of different scales. (c) is the
overlay showing the mismatch, (d) is the result of our
approach. In both examples, the large motion of small
lesion-like structures is corrected under the presence
Figure 4: Quality of registered image with large motion
relative to scale of structures and noise (a) Fixed image
(b) Moving image (c) Overlay showing initial mismatch (d)
Registered image using approach.
Figure 5: Comparison of Approach with Patch SSD (a)
Fixed image (b) Moving image (c) Overlay showing initial
mismatch (d) Registered image using Patch SSD (f) Regis-
tered Result using approach.
Table 1: Timing of Methods.
Method Time (sec)
SSD NRR 27
Patch SSD 232
Approach with Gaussian weights 46
Approach with Intensity based weights 52
of noise. Local NRR approaches would not work here
since there is no overlap of the lesions in the fixed and
moving images, and these methods would collapse
the lesions after NRR. Typical multi-resolution strate-
gies would also not work for large motion of small
structures, since (structure size to motion) ratio would
be preserved across resolutions.
4.2 Comparisons
In subsequent discussion, we compare our approach
with Patch based NRR (e.g. (Bruhn et al., 2005)) and
MI based NRR (e.g. (Lu et al., 2010)):
a) Patch based Methods. Starting with the work of
(Bruhn et al., 2005), there has been a lot of interest in
use of patch based methods within registration mainly
due their robustness to noise and ability to preserve
details of structures under large motion. In this sec-
tion we compare the results of our approach on some
monomodal images with Patch SSD (patch based SSD
metric + local regularization of motion). We wish to
DenseMulti-modalRegistrationwithStructuralIntegrityusingNon-localGradients
261

Figure 6: Synthetic MR comparisons with MI NRR. (a)
Ground truth T1 and T2 images, (b) moving image (c) result
using MI NRR (d) result using approach (e)Error plot (Blue
- before NRR, Cyan - MI NRR, Red - Approach).
comment that the metric used in [Bruhn et al.] is
a linear approximation to the patch based SSD met-
ric, and is suitable for recovering small deformations
only. In spite of the advantages patch based methods
offer, these methods are restrictive in recovering local
non-rigid deformations and are computationally ex-
pensive. Our method shows the advantages of patch
based methods without the above drawbacks. In Fig.
5, in the two examples shown, the fixed image (a) is
non-rigidly deformed to generate the moving image
(b), (c) the overlay showing the mismatch. In (d), we
see that patch SSD has done quite well in recover-
ing deformations under noise. However, artifacts are
seen in the registered image since the metric is too re-
strictive to recover local non-rigid deformations. (e)
shows results using our Approach.
A note on the timing (Table. 1), for the T1 NRR
experiment (250x250 images) in Fig. 5. All runs were
in Matlab, on a 2.6 GHz laptop. It is noted that the
timing for our approach using intensity based weights
is comparable to that with gaussian weights due to
the approximation scheme. The main cost of our ap-
proach over SSD NRR is the use of non-local regular-
ization with a gaussian kernel of width (25x25). Patch
SSD is seen to be expensive since the EL does not in-
volve convolutions and also takes more iterations to
converge under local deformations.
b) Mutual Information [MI] based NRR. There has
been recent interest in extending MI based metrics for
dense NRR. In (Lu et al., 2010), an MI based exten-
sion to diffeomorphic Demon’s algorithm is imple-
mented in a multi-resolution framework [MI NRR].
The main challenge of MI based methods for dense
NRR is that the number of samples available to con-
struct the joint histograms at each point could be
less, resulting in interpolation artifacts. This would
mean optimizing a non-convex metric leading to sub-
optimal solutions, and giving un-realistic deforma-
tions due to over emphasis on regularization.
Now, quantitative comparisons with MI NRR for
MR synthetic data and gated PET-CT data are shown.
In Fig. 6, we consider two experiments, MR T1-T1
NRR and MR T1-T2 NRR. The first row shows the
ground truth T1 and T2 images that are well aligned.
We then generated 10 T1(T2) images by applying in-
creasing ranges of random non-rigid motion to the
ground truth T1(T2) images. The 10 T1(T2) images
are then non-rigidly registered to the ground truth T1
image using MI NRR and our approach. A repre-
sentative example is shown in (a)-(c), (a) is the mov-
ing image, (b) is the result using MI NRR, and (c) is
the result using proposed approach. The plot (d) is
the maximum absolute difference error between the
ground truth T1(T2) image and the registered images.
The Blue curve is the error before NRR, the Cyan
curve is error using MI NRR, and the Red curve is
using proposed approach. As clearly indicated in the
error plots and in the examples, the motion recovery
and the quality of the registered images is better using
the proposed approach.
Next, we look at NRR for gated PET-CT. In gated
PET-CT, PET and Cine CT are synchronized across
breathing phases, using e.g. an external tracking de-
vice. The data consisted of 6 cases ( 3 clinical and
3 synthetic PET Phantoms). Each of the data cases
consisted of 6 PET gates (128x128x50), and 6 corre-
sponding in-phase CT gates (512x512x72). We then
picked the central coronal slices for our 2D experi-
ment and brought the CT images to PET resolution.
For each of the 6 data sets, a PET image and its corre-
sponding in-phase CT image were picked as the ref-
erence. Now, the other 5 CT images were non-rigidly
registered to the reference PET image resulting in 30
NRR computations for the 6 data cases. For valida-
tion, the reference CT image is compared with the
registered CT images for each of the data cases.
We illustrate on a clinical case in Fig. 7. Col-
umn (a) shows the PET reference image and the cor-
responding in-phase CT image (ground truth for com-
parison). Column (b) is the registered CT image, Col-
umn (c) is the overlay of the CT image (b) with the
reference PET image, Column (d) is the difference
image of (b) with the reference CT image. The first,
second and third rows are the outputs before NRR, us-
ing MI NRR, and using the proposed approach. For
quantitative comparison (Fig. 8), we look at the ab-
solute difference errors between the registered image
and the reference CT image around 10 key landmark
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
262

Figure 7: PET CT NRR for a clinical case. Column (a):
PET reference image and the CT reference image with key
landmarks (Red dots), First Row: Before NRR, Second
Row: after MI NRR, Third Row: using proposed approach.
Column (b): registered CT images, Column (c): Overlay of
the CT image (b) with the reference PET image, Column
(d): difference image of (b) with the reference CT image.
Figure 8: First and Second Rows: Error across individual
feature locations (errors due to LEFT/RIGHT feature pairs
have been aggregated for display), Last Row: Mean errors
shown. (Dotted blue - before NRR, Cyan - using MI NRR,
Red - using proposed approach).
locations (red dots shown on the reference CT image
in Fig. 7 (a)). We evaluate the maximum absolute dif-
ference in a 5x5 patch around every landmark point,
for each of the 30 registered images, before NRR (dot-
ted Blue), after MI NRR (Cyan), and after proposed
approach (Red). The errors at different landmark lo-
cations (for display purposes only, the errors due to
left and right landmark pairs are aggregated to save
space) are separately shown. The last row shows the
mean error across images, and across landmark loca-
tions. For the 30 test cases, the proposed approach is
clearly seen to give lesser error values than MI NRR
at key landmark locations.
5 CONCLUSIONS
A weighted L2 match of Non-Local gradients is pro-
posed as a metric for dense multi-modal NRR. The
coupling of NL-regularization gives good correspon-
dence between points of similar geometry in the fixed
and moving images, and preserves the structural in-
tegrity of the registered image. Our method is also
seen to give robustness to noise and ability to preserve
small structures. The approach is demonstrated on
synthetic/medical data, and comparisons are shown
with MI based diffeomorphic NRR.
REFERENCES
Bruhn, A., Weickert, J., and Schnrr, C. (2005). Lu-
cas/kanade meets horn/schunck: Combining local and
global optic flow methods. International Journal of
Computer Vision, 61:211–231.
Haber, E. and Modersitzki., J. (2007). Intensity gradient
based registration and fusion of multimodal images.
methods of information in medicine. Methods of in-
formation in medicine, 46(3):292–299.
Heinrich, M. P., Jenkinson, M., and et al. (2011). Non-
local shape descriptor: a new similarity metric for
deformable multi-modal registration. MICCAI’11,
pages 541–548.
Hellier, P. and Barillot, C. (2000). Multimodal non-rigid
warping for correction of distortions in functional mri.
MICCAI, pages 512–520.
Holden, M. (2008). A review of geometric transformations
fornonrigid body registration. IEEE Transactions on
Medical Imaging, 27(1).
Jost, J. and Li-Jost, X. (1998). Calculus of variations. Cam-
bridge Univ. Press.
Likar, B. and Pernus, F. (2001). A hierarchical approach to
elastic registration based on mutual information. Im-
age Vision Comput., 19(1-2):33–44.
Loeckx, D., Slagmolen, P., Maes, F., Vandermeulen, D., and
Suetens, P. (2010). Nonrigid image registration using
conditional mutual information. IEEE Transactions
on Medical Imaging, 29(1).
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. Int. J. Comput. Vision, 60(2).
Lu, H., Reyes, M., and et al. (2010). Multi-modal diffeo-
morphic demons registration based on point-wise mu-
tual information. ISBI, 27(1).
Mikolajczyk, K. and Schmid, C. (2005). A perfor-
mance evaluation of local descriptors. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
27(10):1615–1630.
Pluim, J. P. W., Maintz, J. B. A., and Viergever, M. A.
(2003). Mutual information based registration of med-
ical images: A survey. IEEE Trans. Med. Imaging,
22(8):986–1004.
Sun (2010). Secrets of optical flow estimation and their
principles. CVPR, 12(1):234–778.
Werlberger (2010). Motion estimation with non-local total
variation regularization. CVPR, 13(1):234–778.
Zitova, B. and Flusser, J. (2003). Image registration meth-
ods:a survey. Image Vision Comput., 21(11):977–
1000.
DenseMulti-modalRegistrationwithStructuralIntegrityusingNon-localGradients
263
